Optimal Thermal Design of a Stacked Mini-Channel Heat Sink Cooled by a Low Flow Rate Coolant


Abstract
:1. Introduction
2. Thermal Design Object
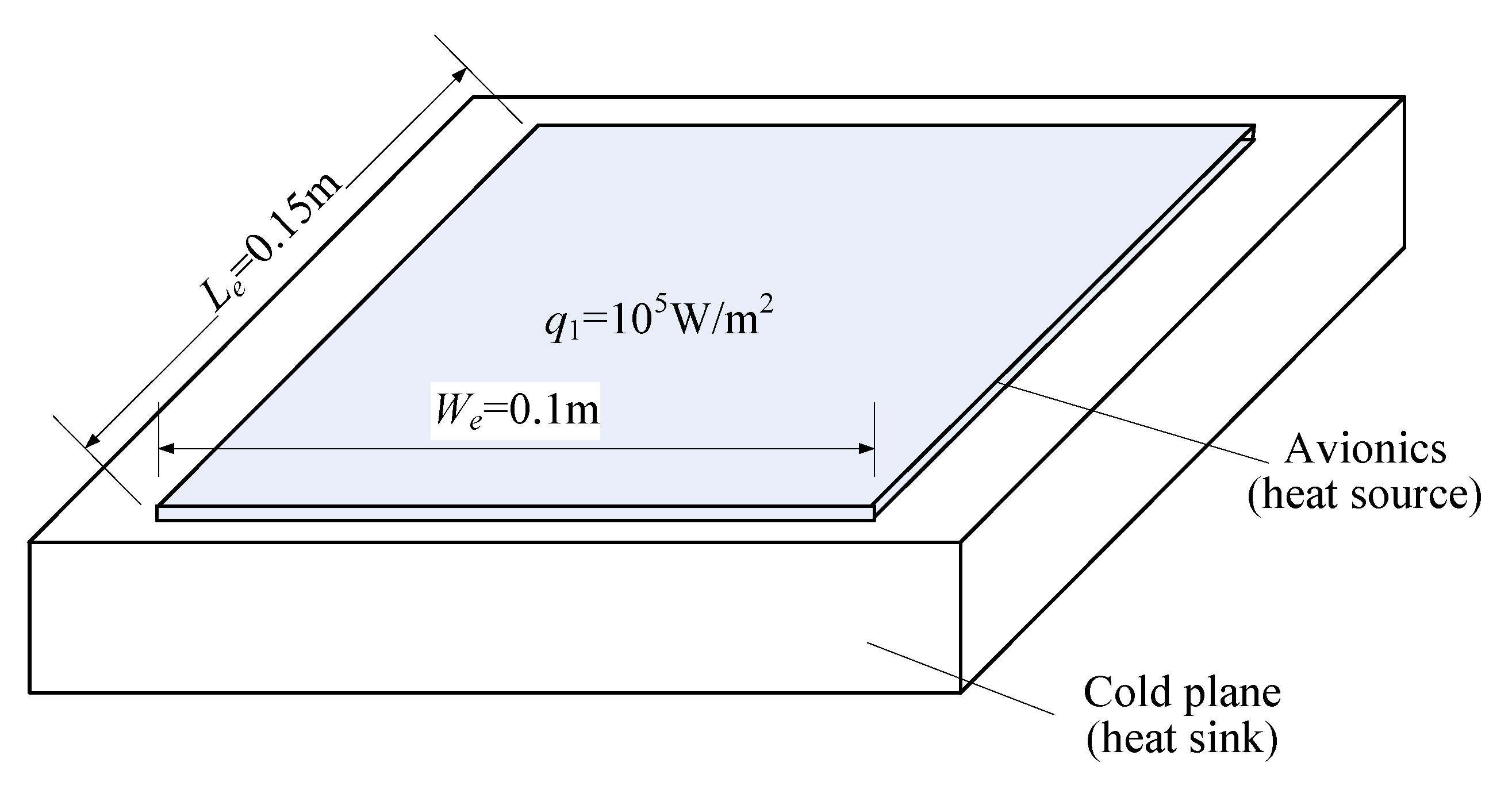
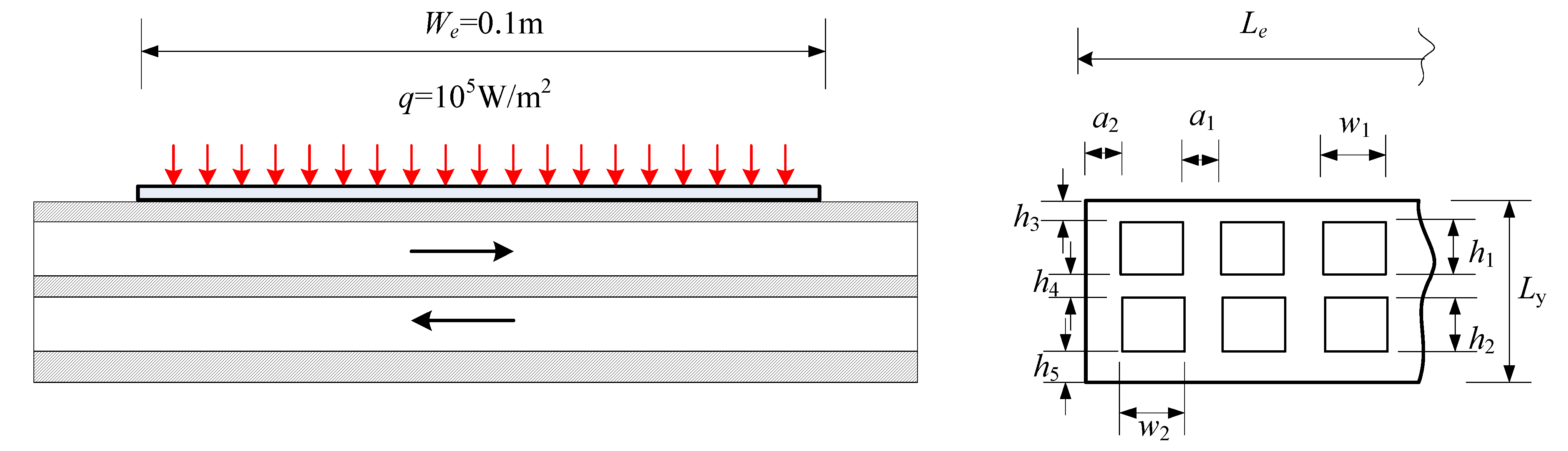
2.1. Structure and Constrained Conditions

- (1)
- Water coolant requirement:Flow rate is 0.08318 kg·s−1, inlet temperature is 313 K and outlet temperature is less than 333 K.
- (2)
- Heat source surface temperature uniformity requirement:Temperature difference between the max and min temperatures of the cooled heat source surface is less than 3 K.
- (3)
- Mini-channel geometry requirement:The width and height of mini-channel should satisfy w ≥ 0.5 mm and 2 mm ≤ h ≤ 10 mm, respectively. The number of mini-channels in every layer satisfies 20 ≤ n ≤ 80. The geometry of mini-channel is relatively large comparing to micro-channel.

2.2. Flow and Heat Transfer Model

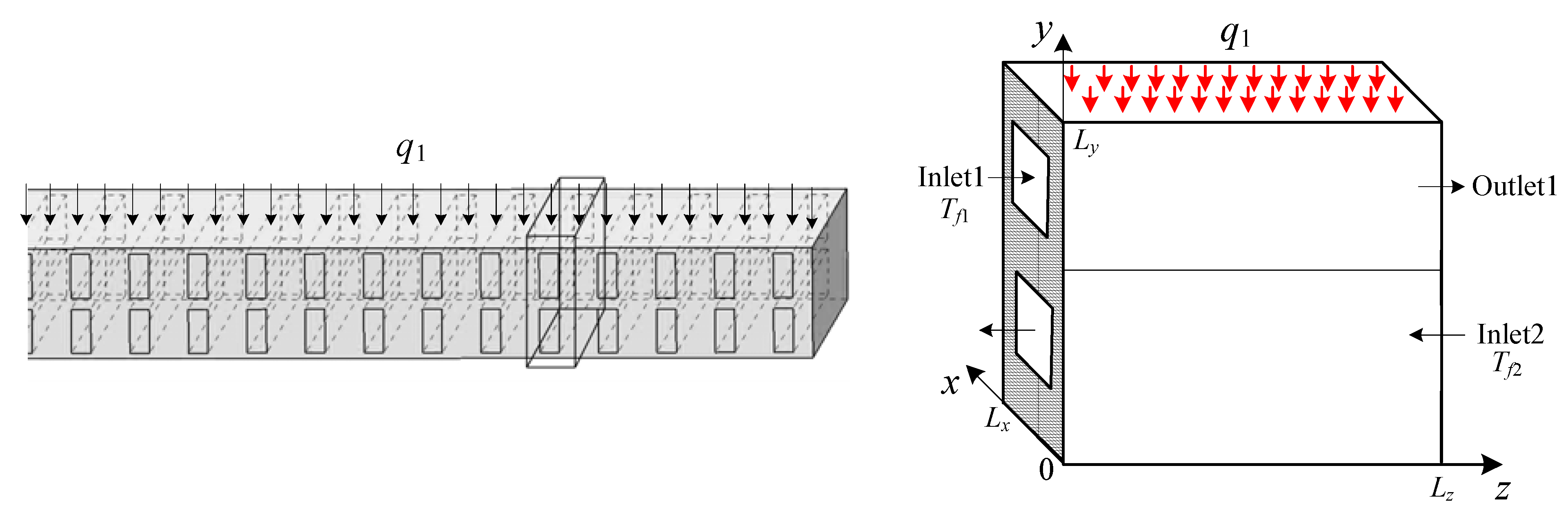
2.3. Boundary Conditions
- (1)
- Solid wall:
- (2)
- Lower channel:
- (3)
- Upper channel:
- (4)
- Solid and fluid interface:
3. Thermal Optimization Design of Stacked Mini-Channel Heat Sink
3.1. Objective Functions and Constraints
- (1)
- Temperature uniformity:
- (2)
- Entropy production sg: min(sg)
- (3)
- Max temperature of heat source:
- (4)
- Pumping power wpump: min(wpump)
- is coolant outlet temperature: Tf,out ≤ 333 K;
- is coolant mass flux: mc = 0.08318 kg·s−1;
- is coolant inlet temperature: = 313 K.
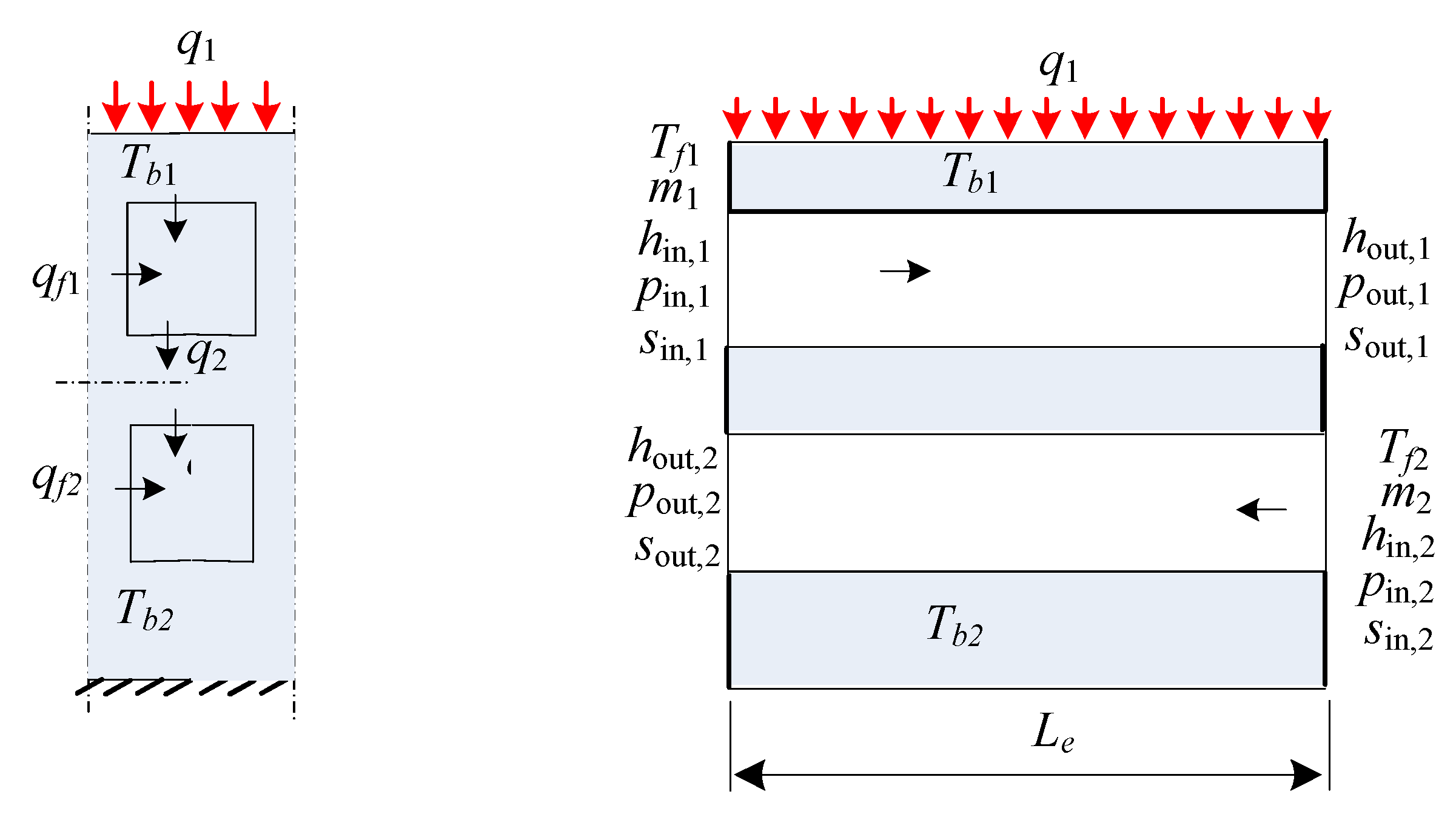
3.1.1. Entropy Generation of Stacked Mini-Channel Heat Sink

3.1.2. Pumping Power
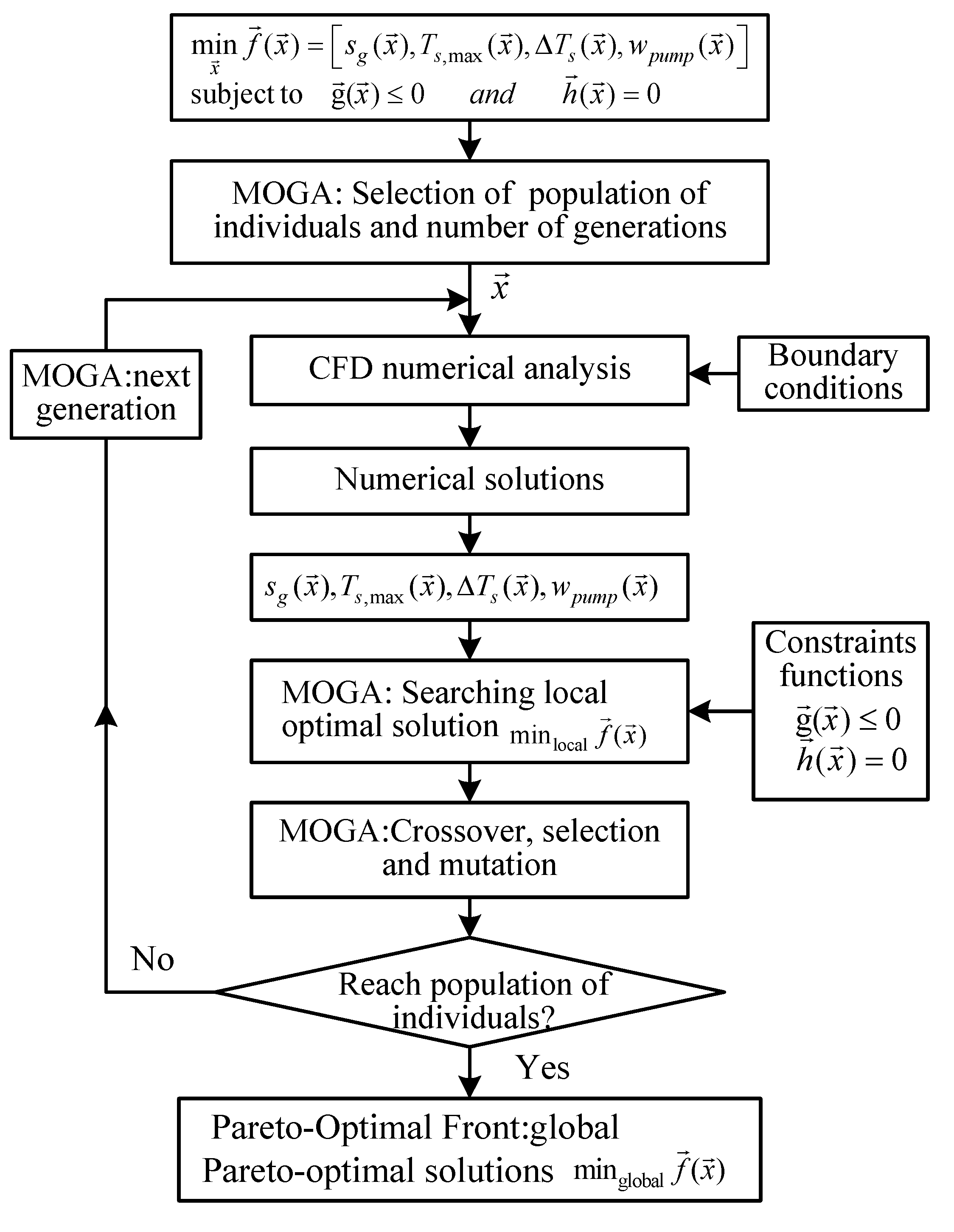
3.2. Optimal Procedure

3.3. Numerical Solution and Calculation Grid

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | ∆ls [×10−3 m] | ∆lf [×10−3 m] | N | [−] | [−] | [−] |
|---|---|---|---|---|---|---|
| 1 | 0.3 | 0.2 | 133560 | 0.5191 | 1.0001 | 0.9938 |
| 2 | 0.1 | 179928 | 0.8161 | 0.9970 | 0.9978 | |
| 3 | 0.05 | 271320 | 1.0000 | 1.0000 | 1.0000 | |
| 4 | 0.03 | 451584 | 1.0070 | 1.0002 | 1.0007 | |
| 5 | 0.6 | 0.05 | 78540 | 0.9794 | 1.0002 | 1.0001 |
| 6 | 0.5 | 104535 | 0.9784 | 0.9999 | 1.0000 | |
| 7 | 0.4 | 149184 | 0.9788 | 0.9968 | 0.9989 | |
| 8 | 0.3 | 271320 | 1.0000 | 1.0000 | 1.0000 | |
| 9 | 0.2 | 620472 | 1.0015 | 0.9999 | 1.0000 |
- CPU: Intel core 2Quad CPU, Q8400, 2.66 GHz;
- Memory is 3.2 G.
4. Optimization Results
4.1. Optimization Conditions
| Number of Generations | 20 |
| Probability of Directional Cross-over | 0.5 |
| Probability of Selection | 0.01 |
| Probability of Mutation | 0.1 |
| DNA String mutation ratio | 0.05 |
| Random generator seed | 1 |
| Population of Individuals | 50 |
4.2. Pareto Optimal Solutions




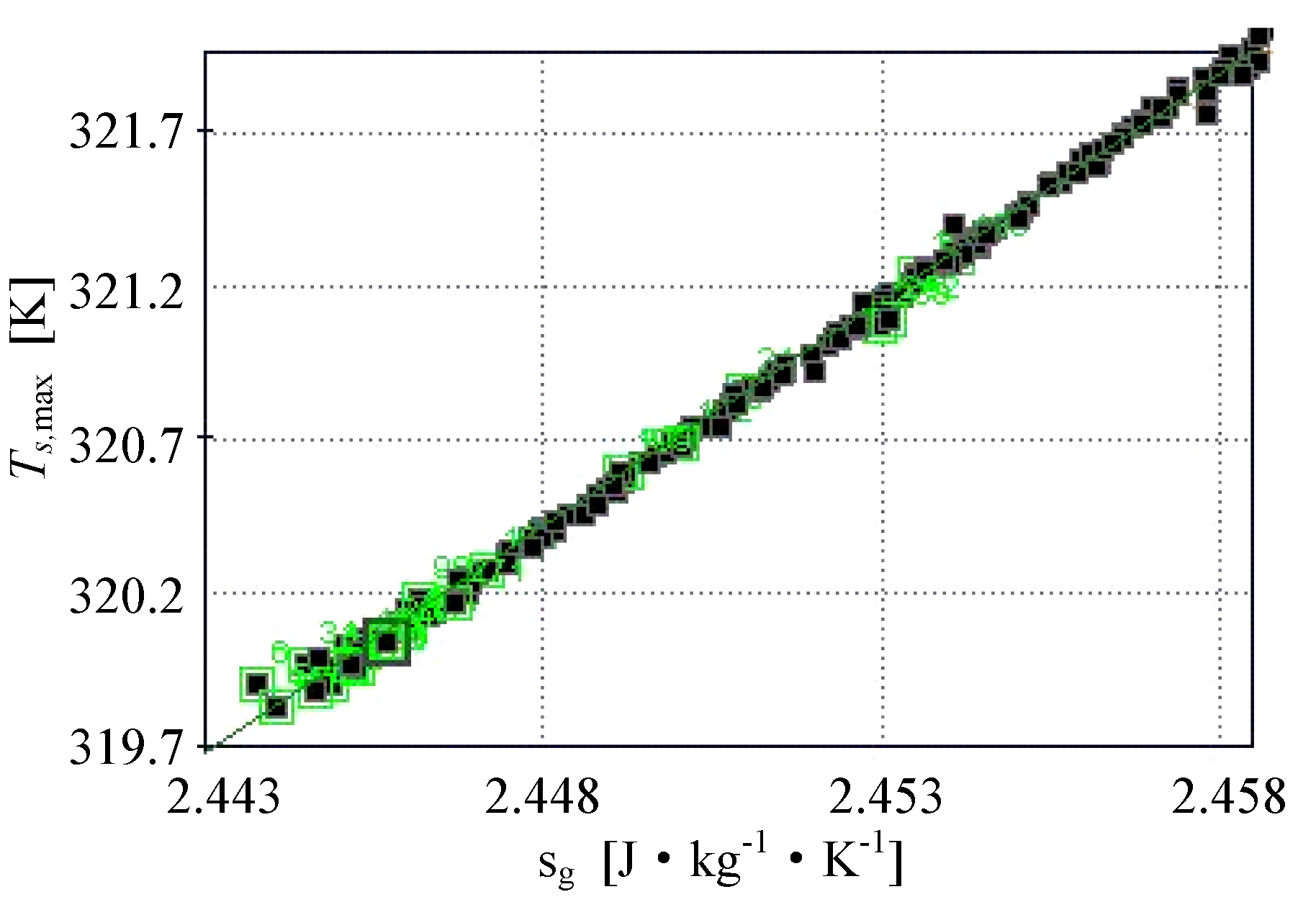
- (1)
- The design state points, 6, 56, 196, 137, 265, 268, 271, are on the Pareto front of ∆Ts and sg in Figure 8, and 168, 154, 210, 137 are very close to the Pareto front.
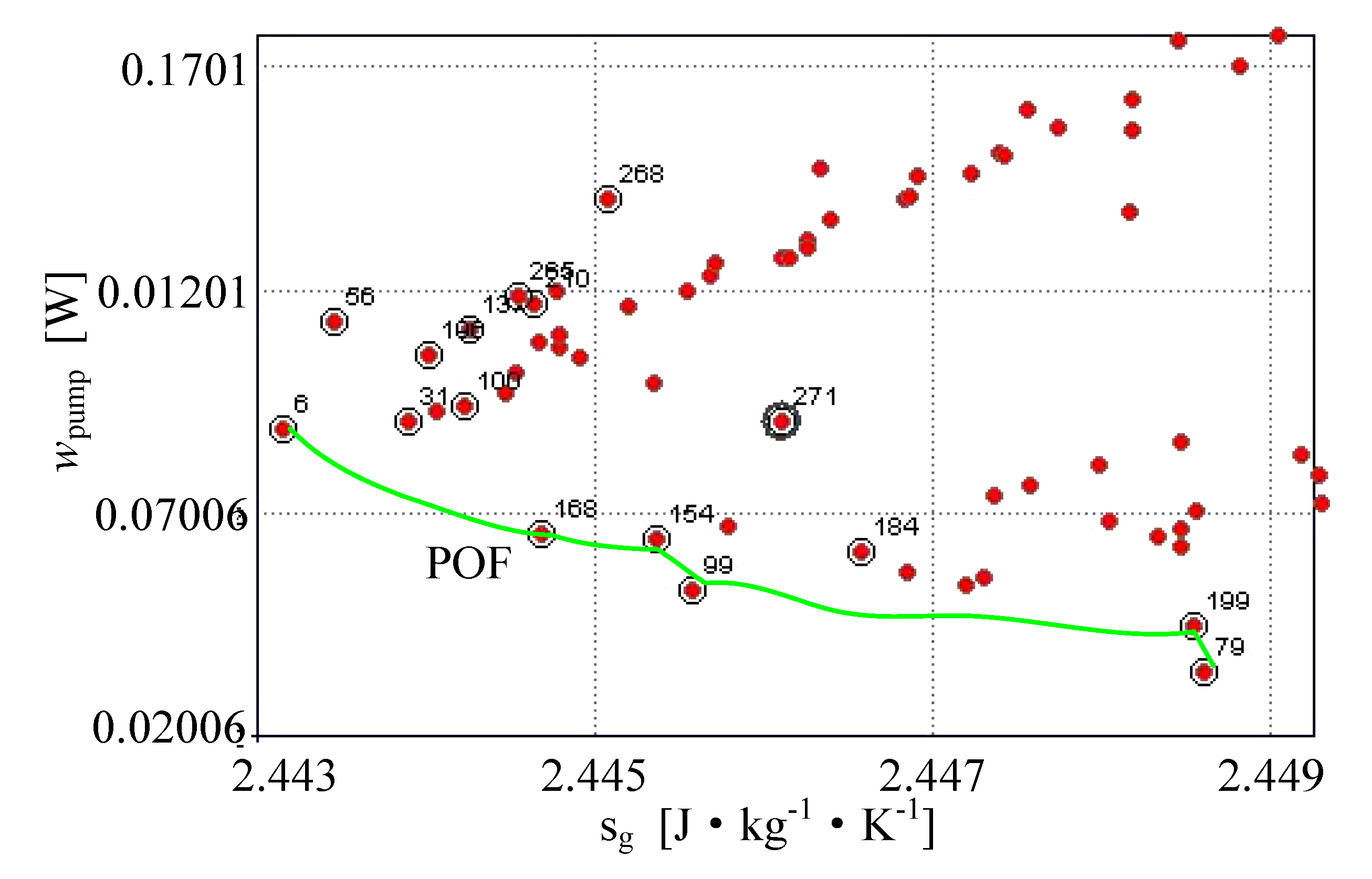
- (2)
- The design state points, 6, 168, 154, 99, 199 are on the Pareto front of wpump and sg in Figure 9, and 265, 271 are close to the Pareto front.
| Number | h [×10−3 m] | w [×10−3 m] | n | ∆Ts [K] | sg [J·kg−1·K−1] | wpump [×10−2 W] | a2 [×10−3 m] | Ly [×10−3 m] |
|---|---|---|---|---|---|---|---|---|
| 271 | 4.8 | 0.6 | 50 | 1.935 | 2.446 | 9.05 | 1.20 | 12.6 |
| 154 | 4.8 | 0.6 | 70 | 2.211 | 2.446 | 6.402 | 0.77 | 12.6 |
| 168 | 4.7 | 0.6 | 70 | 2.283 | 2.445 | 6.559 | 0.77 | 12.5 |


- (1)
- In Figure 10, ∆Ts = 1.935 K, so the temperature uniformity requirement on the heat source surface can be satisfied very well.
- (2)
- The max temperature exists at the middle of the heat source surface due to the double-channel cooling channel arrangement.
- (3)
- The flow temperature at the outlet is 317 K, and it is far less than 333 K.
- (4)
- In the Figure 11, the flow velocity can quickly reach its uniform velocity after a very short distance from the inlet, so the flow can be assumed as a fully developed laminar flow at the most positions.
5. Conclusions
Acknowledgments
Conflicts of Interest
References
- Haddad, O.; Abuzaid, M.; Al-Nimr, M. Entropy generation due to laminar incompressible forced convection flow through parallel-plates minichannel. Entropy 2004, 6, 413–426. [Google Scholar]
- Liu, D.; Garimella, S.V. Analysis and optimization of the thermal performance of minichannel heat sinks. Int. J. Numer. Methods Heat Fluid Flow 2005, 15, 7–26. [Google Scholar] [CrossRef]
- Pritish, R.P.; Srinath, V.E.; Khai, N. Multi-layer mini-channel and ribbed mini-channel based high performance cooling configurations for automotive inverters—Part A: Design and evaluation. J. Therm. Sci. Eng. Appl. 2013, 5, 1–13. [Google Scholar]
- Hung, T.C.; Sheu, T.S.; Yan, W.M. Optimal thermal design of microchannel heat sinks with different geometric configurations. Int. Commun. Heat Mass Transf. 2012, 39, 1572–1577. [Google Scholar] [CrossRef]
- Hassel, B.; Ortega, A. Analysis of multi-layer mini- and micro-channel heat sinks in single phase flow using one and two equation porous media models. Heat Transf. Eng. 2011, 32, 1–9. [Google Scholar]
- Bowers, M.B.; Mudawar, I. High flux boiling in low flow rate, low pressure drop mini-channel and micro-channel heat sinks. Int. J. Heat Mass Transf. 1994, 37, 321–332. [Google Scholar] [CrossRef]
- Wei, X.J.; Joshi, Y. Stacked microchannel heat sinks for liquid cooling of microelectronic components. J. Electron. Package 2004, 126, 60–66. [Google Scholar] [CrossRef]
- Wei, X.J.; Joshi, Y. Optimization study of stacked mini-channel heat sinks for mini-electronic cooling. IEEE Trans. Compon. Package Technol. 2003, 26, 55–61. [Google Scholar]
- Hung, T.C.; Yan, W.M.; Wang, X.D.; Huang, Y.X. Optimal design of geometric parameters of double-layered microchannel heat sinks. Int. J. Heat Mass Transf. 2012, 55, 3262–3272. [Google Scholar] [CrossRef]
- Hung, T.C.; Yan, W.M.; Li, W.P. Analysis of heat transfer characteristics of double-layered microchannel heat sink. Int. J. Heat Mass Transf. 2012, 55, 3090–3099. [Google Scholar]
- Dixit, P.; Lin, N.; Miao, J.; Wong, W.K.; Teo, K.C. Concept and Analytical Analysis of Silicon Mini/Nanopillars Based 3-D Stacked Minichannel Heat Sink for Advanced Heat Dissipation Applications. In Proceedings of the Electronic Components and Technology Conference, Sparks, NV, USA, 29 May–1 June 2007; pp. 1149–1154.
- Liu, Y.L.; Luo, X.B.; Liu, W. Cooling behavior in a novel heat sink based on multilayer staggered honeycomb structure. J. Energy Power Eng. 2010, 4, 22–28. [Google Scholar]
- Toh, K.C.; Chen, X.Y.; Chai, J.C. Numerical computation of fluid flow and heat transfer in minichannels. Int. J. Heat Mass Transf. 2002, 45, 5133–5141. [Google Scholar] [CrossRef]
- Shao, B.D.; Wang, L.F.; Cheng, H.M.; Li, J. Optimization and numerical simulation of multi-layer minichannel heat sink. Procedia Eng. 2012, 31, 928–933. [Google Scholar] [CrossRef]
- Wang, X.Q.; Mujumdar, A.; Yap, C. Numerical analysis of blockage and optimization of heat transfer performance of fractal-like microchannel nets. J. Electron. Packag. 2006, 128, 38–45. [Google Scholar] [CrossRef]
- Jeevan, K.; Quadir, G.A.; Seetharamu, K.N.; Azid, I.A.; Zainal, Z.A. Optimization of thermal resistance of stacked micro-channel using genetic algorithms. Int. J. Numer. Methods Heat Fluid Flow 2005, 15, 27–42. [Google Scholar] [CrossRef]
- Shao, B.D.; Wang, L.F.; Li, J.Y.; Cheng, H.M. Multi-objective optimization design of a mini-channel heat sink using adaptive genetic algorithm. Int. J. Numer. Methods Heat Fluid Flow 2011, 21, 353–364. [Google Scholar]
- Foli, K.; Okabe, T.; Olhofer, M.; Jin, Y.; Sendhoff, B. Optimization of mini heat exchanger: CFD, analytical approach and multi-objective evolutionary algorithms. Int. J. Heat Mass Transf. 2006, 49, 1090–1099. [Google Scholar] [CrossRef]
- Karathanassis, I.K.; Papanicolaou, E.; Belessiotis, V.; Bergeles, G.C. Multi-objective design optimization of a mini heat sink for Concentrating Photovoltaic/Thermal (CPVT) systems using a genetic algorithm. Appl. Therm. Eng. 2013, 59, 733–744. [Google Scholar] [CrossRef]
- Husain, A.; Kim, K.Y. Enhanced multi-objective optimization of a minichannel heat sink through evolutionary algorithm coupled with multiple surrogate models. Appl. Therm. Eng. 2010, 30, 1683–1691. [Google Scholar] [CrossRef]
- Hassan, M.; Sadri, R.; Ahmadi, G.; Dahari, M.B.; Kazi, S.N.; Safaei, M.R.; Sadeghinezhad, E. Numerical study of entropy generation in a flowing nanofluid used in micro- and mini-channels. Entropy 2013, 15, 144–155. [Google Scholar] [CrossRef]
- Ansari, D.; Husain, A.; Kim, K.Y. Multiobjective optimization of a grooved mini-channel heat sink. IEEE Trans. Compon. Package Technol. 2010, 15, 767–776. [Google Scholar] [CrossRef]
- Khan, W.A.; Culham, J.R. Optimization of minichnnel heat sinks using entropy generation minimization method. IEEE Trans. Compon. Package Technol. 2009, 32, 243–251. [Google Scholar] [CrossRef]
- Deb, K. Multi-Objective Optimization Using Evolutionary Algorithms; Wiley: London, UK, 2001. [Google Scholar]
- Jaluria, Y. Simulation-based optimization of thermal systems. Appl. Therm. Eng. 2009, 29, 1346–1355. [Google Scholar] [CrossRef]
- Poles, S.; Geremia, P.; Campos, F.; Weston, S.; Islam, M. MOGA-II for an Automotive Cooling Duct Optimization on Distributed Resources. In Proceedings of the 4th International Conference on Evolutionary Multi-Criterion Optimization (EMO’07), Matsushima, Japan, 5 May–8 March 2007; Springer: Berlin/Heidelberg, Germany, 2007; pp. 633–644. [Google Scholar]
- FLUENT, v. 6.3. Software for fluid simulation; Fluent, Inc.: New York, NY, USA, 2006.
- Shah, R.K.; London, A.L. Laminar Flow Forced Convection in Ducts; Academic Press: New York, NY, USA, 1978. [Google Scholar]
© 2013 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Pang, L.; Wang, M.; Wang, W.; Liu, M.; Wang, J. Optimal Thermal Design of a Stacked Mini-Channel Heat Sink Cooled by a Low Flow Rate Coolant. Entropy 2013, 15, 4716-4731. https://doi.org/10.3390/e15114716
Pang L, Wang M, Wang W, Liu M, Wang J. Optimal Thermal Design of a Stacked Mini-Channel Heat Sink Cooled by a Low Flow Rate Coolant. Entropy. 2013; 15(11):4716-4731. https://doi.org/10.3390/e15114716
Chicago/Turabian StylePang, Liping, Minxing Wang, Wei Wang, Meng Liu, and Jun Wang. 2013. "Optimal Thermal Design of a Stacked Mini-Channel Heat Sink Cooled by a Low Flow Rate Coolant" Entropy 15, no. 11: 4716-4731. https://doi.org/10.3390/e15114716
APA StylePang, L., Wang, M., Wang, W., Liu, M., & Wang, J. (2013). Optimal Thermal Design of a Stacked Mini-Channel Heat Sink Cooled by a Low Flow Rate Coolant. Entropy, 15(11), 4716-4731. https://doi.org/10.3390/e15114716