
Adaptive Synchronization for a Class of Uncertain Fractional-Order Neural Networks


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminaries
3. Main Results
3.1. Problem Statement
3.2. Adaptive Synchronization Controller Design and Stability Analysis
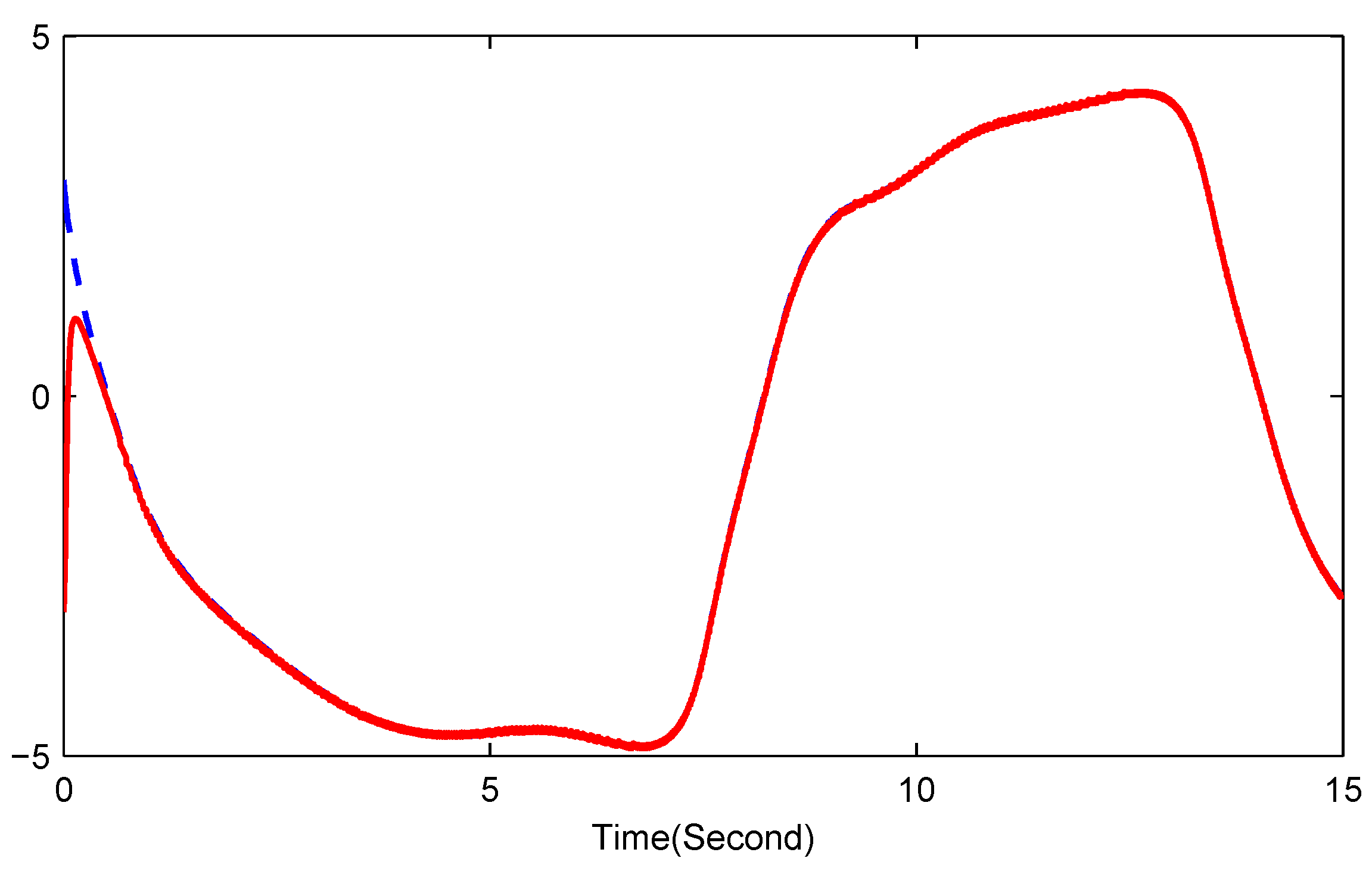
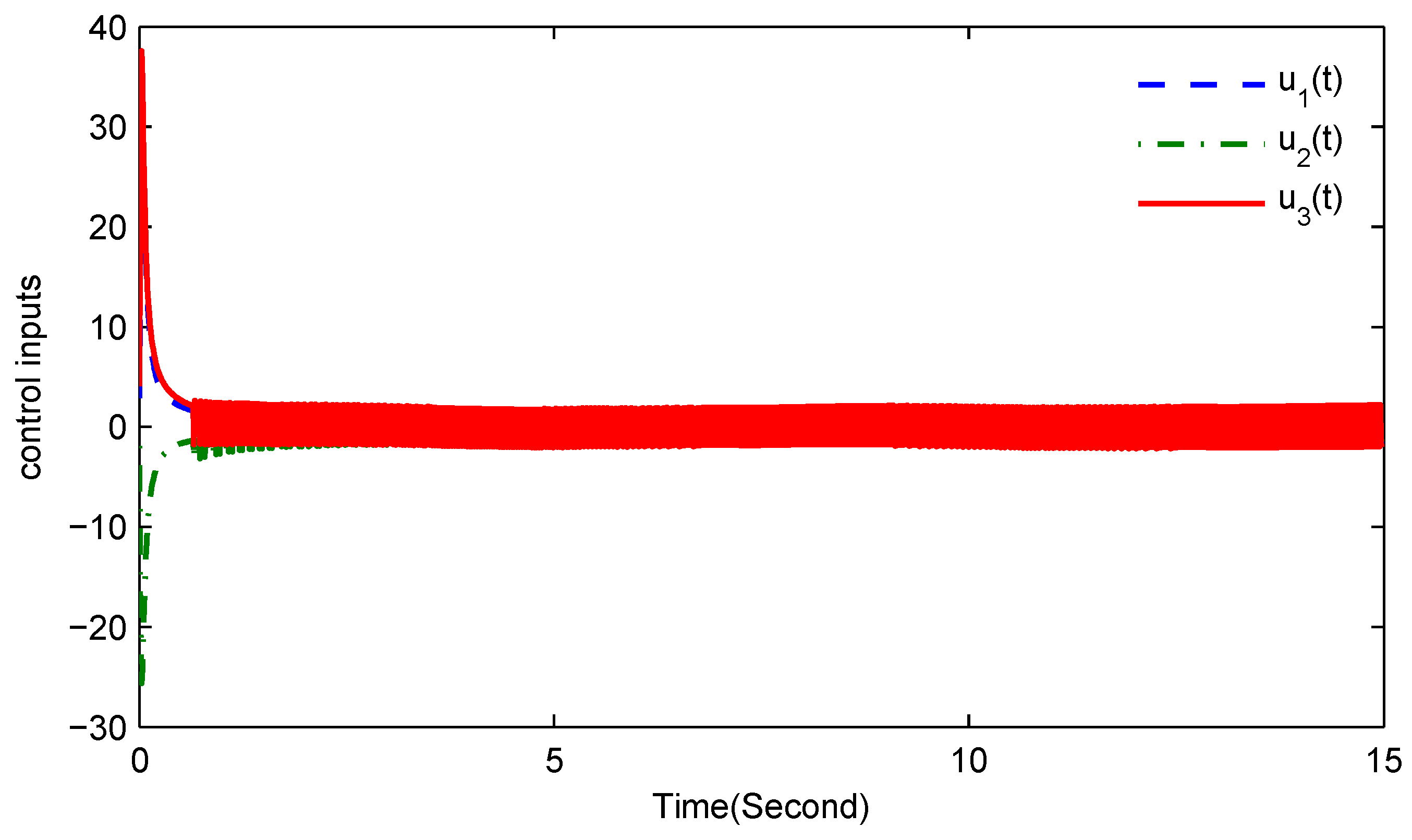
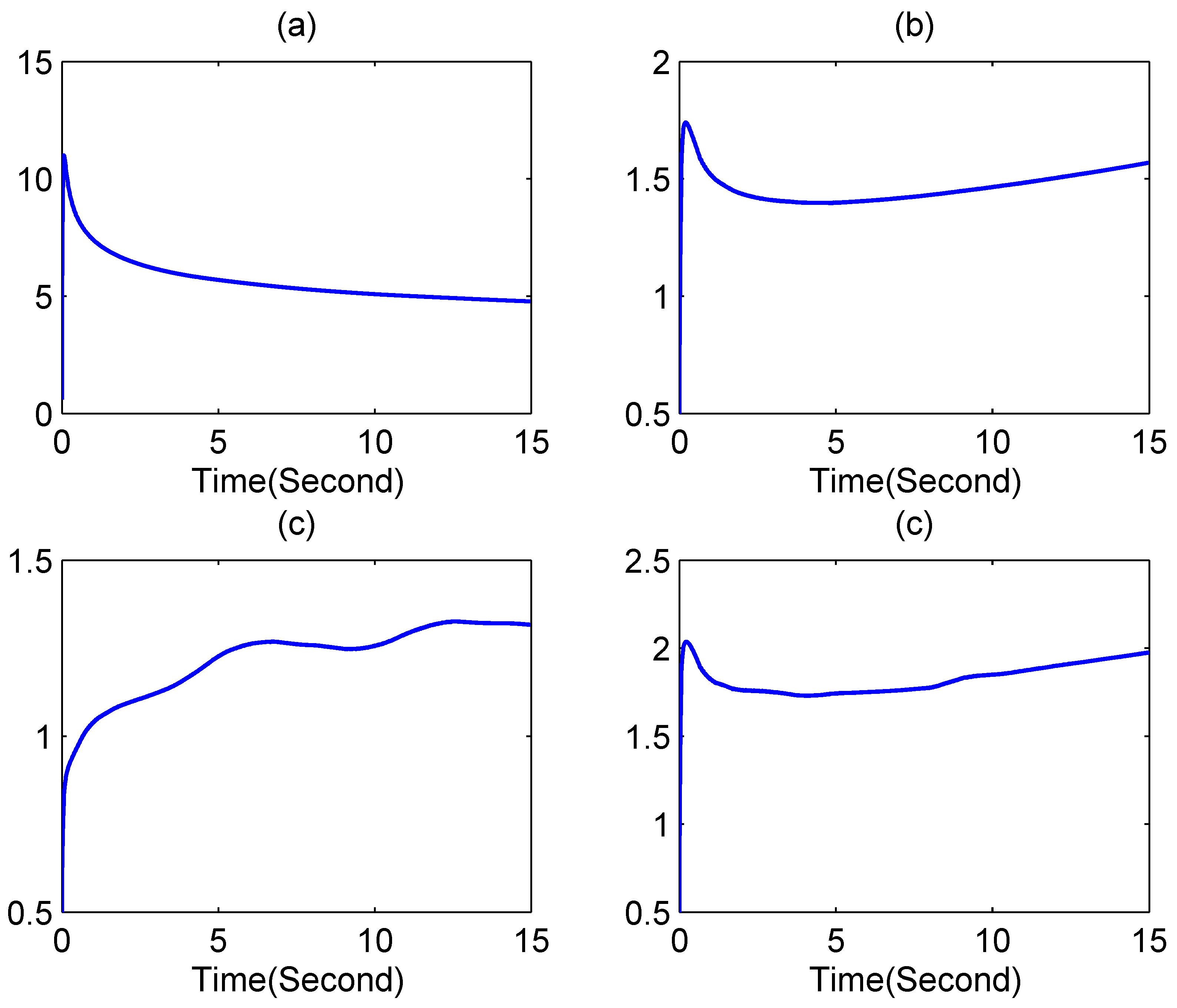
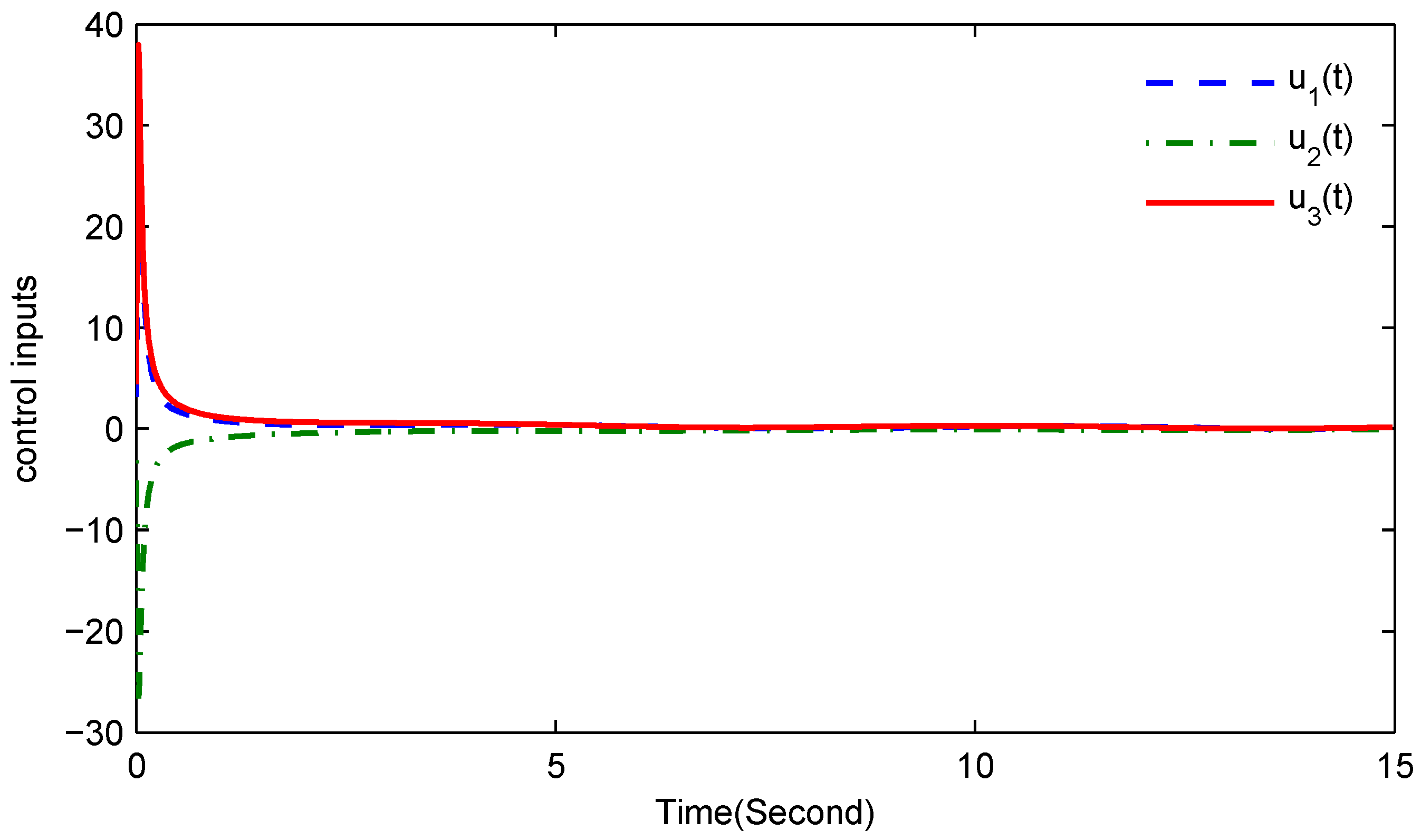
4. Simulation Studies









5. Conclusions
Acknowledgements
Author Contributions
Conflicts of Interest
References
- Podlubny, I. Fractional Differential Equations; Academic Press: San Diego, CA, USA, 1999. [Google Scholar]
- Hilfer, R. Applications of Fractional Calculus in Physics; World Scientific York: Singapore, Singapore, 2000. [Google Scholar]
- Chen, L.; Qu, J.; Chai, Y.; Wu, R.; Qi, G. Synchronization of a class of fractional-order chaotic neural networks. Entropy 2013, 15, 3265–3276. [Google Scholar] [CrossRef]
- Li, Y.; Chen, Y.; Podlubny, I. Mittag-Leffler stability of fractional order nonlinear dynamic systems. Automatica 2009, 45, 1965–1969. [Google Scholar] [CrossRef]
- Delavari, H.; Baleanu, D.; Sadati, J. Stability analysis of Caputo fractional-order nonlinear systems revisited. Nonlinear Dyn. 2012, 67, 2433–2439. [Google Scholar] [CrossRef]
- Liu, H.; Li, S.; Sun, Y.; Wang, H. Adaptive fuzzy synchronization for uncertain fractional-order chaotic systems with unknown non-symmetrical control gain. Acta Phys. Sin. 2015, 64, 070503. (In Chinese) [Google Scholar]
- Liu, H.; Li, S.; Sun, Y.; Wang, H. Prescribed performance synchronization for fractional-order chaotic systems. Chin. Phys. B 2015, 24, 090505. [Google Scholar] [CrossRef]
- Dadras, S.; Momeni, H.R. Fractional-order dynamic output feedback sliding mode control design for robust stabilization of uncertain fractional-order nonlinear systems. Asian J. Control 2014, 16, 489–497. [Google Scholar] [CrossRef]
- Shen, J.; Lam, J. Non-existence of finite-time stable equilibria in fractional-order nonlinear systems. Automatica 2014, 50, 547–551. [Google Scholar] [CrossRef]
- Yin, C.; Cheng, Y.; Zhong, S.M.; Bai, Z. Fractional-order switching type control law design for adaptive sliding mode technique of 3D fractional-order nonlinear systems. Complexity 2015. [Google Scholar] [CrossRef]
- Arena, P.; Caponetto, R.; Fortuna, L.; Porto, D. Bifurcation and chaos in non-integer order cellular neural networks. Int. J. Bifurac. Chaos 1998, 8, 1527–1539. [Google Scholar] [CrossRef]
- Petráč, I. A note on the fractional-order cellular neura lnetworks. In Proccedings of 2006 International Joint Conference on Neural Networks, Vancouver, BC, Canada, 16–21 July 2006; pp. 1021–1024.
- Wu, R.; Lu, Y.; Chen, L. Finite-time stability of fractional delayed neural networks. Neurocomputing 2015, 149, 700–707. [Google Scholar] [CrossRef]
- Huang, H.; Huang, T.; Chen, X. A mode-dependen tapproach to state estimation of recurrent neural networks with Markovian jumping parameters and mixed delays. Neural Netw. 2013, 46, 50–61. [Google Scholar] [CrossRef] [PubMed]
- Ma, W.; Li, C.; Wu, Y.; Wu, Y. Adaptive synchronization of fractional neural networks with unknown parameters and time delays. Entropy 2014, 16, 6286–6299. [Google Scholar] [CrossRef]
- Li, T.; Song, A.G.; Fei, S.M.; Guo, Y.Q. Synchronization control of chaotic neural networks with time-varying and distributed delays. Nonlinear Anal. Theory Methods Appl. 2009, 71, 2372–2384. [Google Scholar] [CrossRef]
- Gan, Q.T.; Hu, R.X.; Liang, Y.H. Adaptive synchronization for stochastic competitive neural networks with mixed time-varying delays. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 3708–3718. [Google Scholar] [CrossRef]
- Arena, P.; Fortuna, L.; Porto, D. Chaotic behavior in noninteger-order cellular neural networks. Phys. Rev. E 2000, 61, 776–781. [Google Scholar] [CrossRef]
- Arena, P.; Caponetto, R.; Fortuna, L.; Porto, D. Bifurcation and chaos in noninteger order cellular neural networks. Int. J. Bifurac. Chaos 1998, 8, 1527–1539. [Google Scholar] [CrossRef]
- Boroomand, A.; Menhaj, M. Fractional-order hopfield neural networks. In Advances in Neuro-Information Processing; Springer: Berlin/Heidelberg, Germany, 2009; pp. 883–890. [Google Scholar]
- Huang, X.; Zhao, Z.; Wang, Z.; Lia, Y.X. Chaos and hyperchaos in fractional-order cellular neural networks. Neurocomputing 2012, 94, 13–21. [Google Scholar] [CrossRef]
- Hu, C.; Yu, J.; Jiang, H. Finite-time synchronization of delayed neural networks with Cohen-Grossberg type based on delayed feed back control. Neurocomputing 2015, 143, 90–96. [Google Scholar] [CrossRef]
- Chen, J.; Zeng, Z.; Jiang, P. Global Mittag-Leffler stability and synchronization of memristor-based fractional-order neural networks. Neural Netw. 2014, 51, 1–8. [Google Scholar] [CrossRef] [PubMed]
- Bao, H.; Cao, J. Projective synchronization of fractional-order memristor-based neural networks. Neural Netw. 2015, 63, 1–9. [Google Scholar] [CrossRef] [PubMed]
- Aguila-Camacho, N.; Duarte-Mermoud, M.A.; Gallegos, J.A. Lyapunov functions for fractional order systems. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 2951–2957. [Google Scholar] [CrossRef]
- Duarte-Mermoud, M.A.; Aguila-Camacho, N.; Gallegos, J.A.; Castro-Linares, R. Using general quadratic Lyapunov functions to prove Lyapunov uniform stability for fractional order systems. Commun. Nonlinear Sci. Numer. Simul. 2015, 22, 650–659. [Google Scholar] [CrossRef]
- Lazarević, M.P.; Debeljković, D.L. Finite time stability analysis of linear autonomous fractional order systems with delayed state. Asian J. Control 2005, 7, 440–447. [Google Scholar]
- Asheghan, M.M.; Delshad, S.S.; Beheshti, M.T.H.; Tavazoei, M.S. Non-fragile control and synchronization of a new fractional order chaotic system. Appl. Math. Comput. 2013, 222, 712–721. [Google Scholar] [CrossRef]
- Yu, J.; Hu, C.; Jiang, H. α-stability and α-synchronization for fractional-order neural networks. Neural Netw. 2012, 35, 82–87. [Google Scholar] [CrossRef] [PubMed]
- Li, K.; Peng, J.; Gao, J. A comment on “α-stability and α-synchronization for fractional-order neural networks”. Neural Netw. 2013, 48, 207–208. [Google Scholar]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, H.; Li, S.; Wang, H.; Huo, Y.; Luo, J. Adaptive Synchronization for a Class of Uncertain Fractional-Order Neural Networks. Entropy 2015, 17, 7185-7200. https://doi.org/10.3390/e17107185
Liu H, Li S, Wang H, Huo Y, Luo J. Adaptive Synchronization for a Class of Uncertain Fractional-Order Neural Networks. Entropy. 2015; 17(10):7185-7200. https://doi.org/10.3390/e17107185
Chicago/Turabian StyleLiu, Heng, Shenggang Li, Hongxing Wang, Yuhong Huo, and Junhai Luo. 2015. "Adaptive Synchronization for a Class of Uncertain Fractional-Order Neural Networks" Entropy 17, no. 10: 7185-7200. https://doi.org/10.3390/e17107185
APA StyleLiu, H., Li, S., Wang, H., Huo, Y., & Luo, J. (2015). Adaptive Synchronization for a Class of Uncertain Fractional-Order Neural Networks. Entropy, 17(10), 7185-7200. https://doi.org/10.3390/e17107185