Dynamics Analysis of a Nonlinear Stochastic SEIR Epidemic System with Varying Population Size



{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Global Positive Solution
3. Extinction
4. Permanence in Mean
5. Stationary Distribution and Ergodicity
6. Simulations and Conclusions
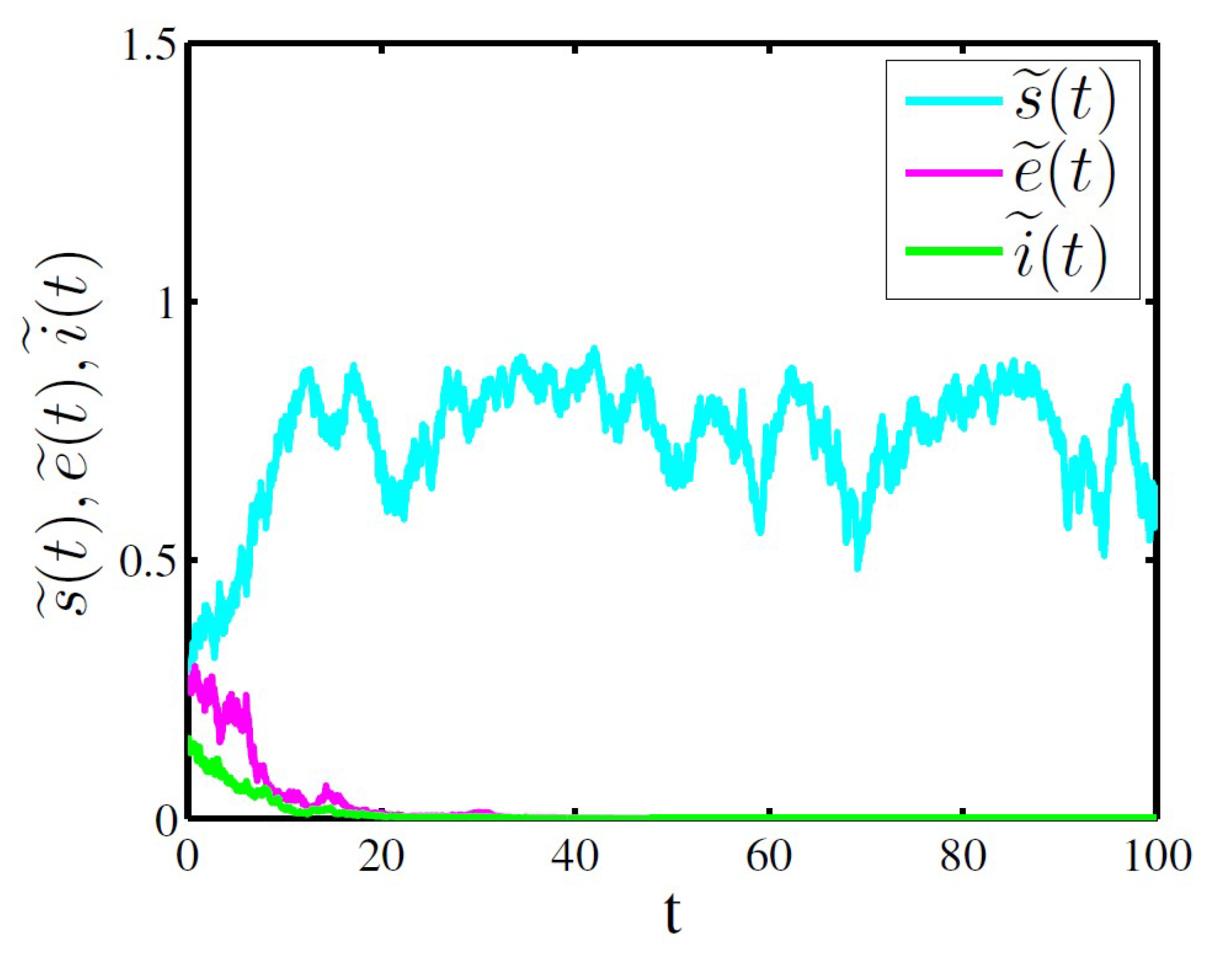
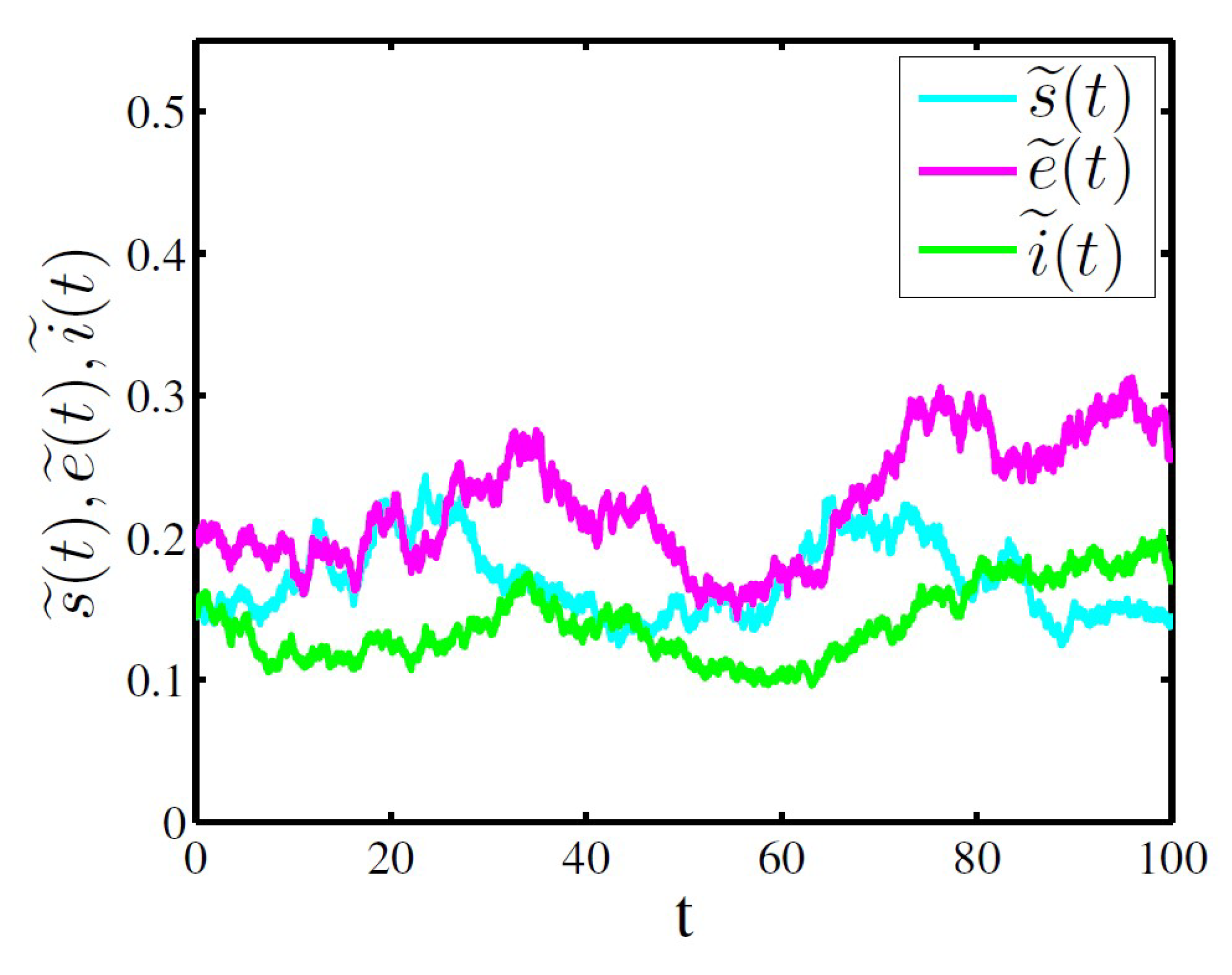
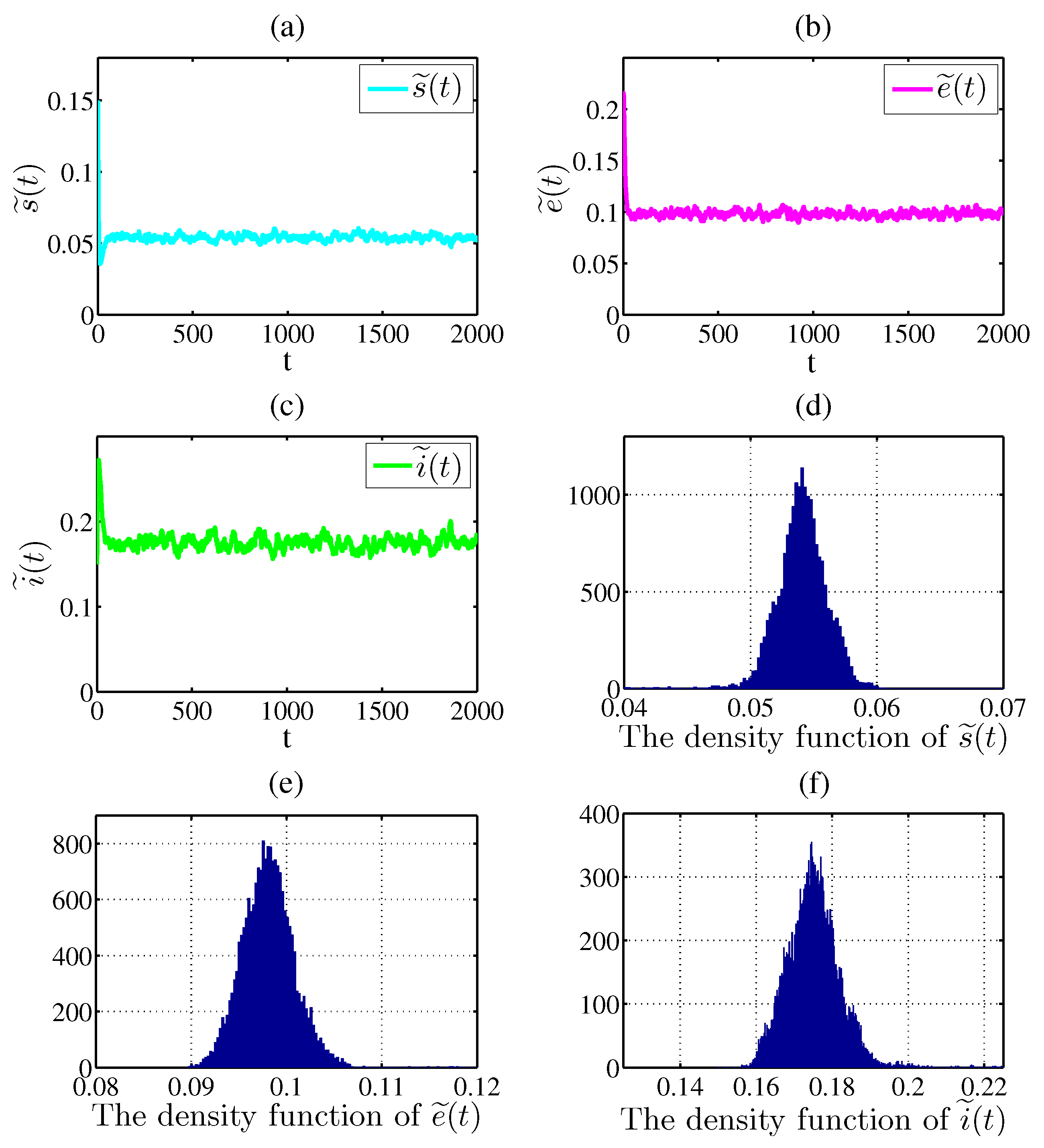
6.1. Simulations
6.2. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
Appendix A.
Appendix B.
Appendix C.
Appendix D.
References
- Kermack, W.O.; McKendrick, A.G. Contributions to the mathematical theory of epidemics-I. Bull. Math. Biol. 1991, 53, 33–55. [Google Scholar] [PubMed]
- Cai, Y.; Kang, Y.; Banerjee, M.; Wang, W. A stochastic SIRS epidemic model with infectious force under intervention strategies. J. Differ. Equat. 2015, 259, 7463–7502. [Google Scholar] [CrossRef]
- Sun, G.; Jusup, M.; Jin, Z.; Wang, Y.; Wang, Z. Pattern transitions in spatial epidemics: Mechanisms and emergent properties. Phys. Life. Rev. 2016, 19, 43–73. [Google Scholar] [CrossRef] [PubMed]
- Zhang, T.; Meng, X.; Zhang, T. Global analysis for a delayed SIV model with direct and environmental transmissions. J. Appl. Anal. Comput. 2016, 6, 479–491. [Google Scholar]
- Zhou, L.; Fan, M. Dynamics of an SIR epidemic model with limited medical resources revisited. Nonlinear Anal. Real World Appl. 2012, 13, 312–324. [Google Scholar] [CrossRef]
- Huang, G.; Takeuchi, Y.; Ma, W.; Wei, D. Global stability for delay SIR and SEIR epidemic models with nonlinear incidence rate. Bull. Math. Biol. 2010, 72, 1192–1207. [Google Scholar] [CrossRef] [PubMed]
- Jiang, Z.; Ma, W.; Wei, J. Global Hopf bifurcation and permanence of a delayed SEIRS epidemic model. Math. Comput. Simul. 2016, 122, 35–54. [Google Scholar] [CrossRef]
- Wang, W.; Zhang, T.Q. Caspase-1-Mediated Pyroptosis of the Predominance for Driving CD4+ T Cells Death: A Nonlocal Spatial Mathematical Model. Bull. Math. Biol. 2018, 80, 540–582. [Google Scholar] [CrossRef] [PubMed]
- Zhang, S.; Meng, X.; Feng, T.; Zhang, T. Dynamics analysis and numerical simulations of a stochastic non-autonomous predator-prey system with impulsive effects. Nonlinear Anal. Hybrid Syst. 2017, 26, 19–37. [Google Scholar] [CrossRef]
- Zhang, S.; Meng, X.; Wang, X. Application of stochastic inequalities to global analysis of a nonlinear stochastic SIRS epidemic model with saturated treatment function. Adv. Differ. Equ. 2018, 2018, 50. [Google Scholar] [CrossRef]
- Liu, M.; Fan, M. Permanence of stochastic Lotka-Volterra systems. J. Nonlinear Sci. 2017, 27, 425–452. [Google Scholar] [CrossRef]
- Li, X.; Lin, X.; Lin, Y. Lyapunov-type conditions and stochastic differential equations driven by G-Brownian motion. J. Math. Anal. Appl. 2016, 439, 235–255. [Google Scholar] [CrossRef]
- Meng, X.; Wang, L.; Zhang, T. Global dynamics analysis of a nonlinear impulsive stochastic chemostat system in a polluted environment. J. Appl. Anal. Comput. 2016, 6, 865–875. [Google Scholar]
- Ma, H.; Jia, Y. Stability analysis for stochastic differential equations with infinite Markovian switchings. J. Math. Anal. Appl. 2016, 435, 593–605. [Google Scholar] [CrossRef]
- Liu, G.; Wang, X.; Meng, X.; Gao, S. Extinction and persistence in mean of a novel delay impulsive stochastic infected predator-prey system with jumps. Complexity 2017, 2017, 1–15. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhang, W. Observer-based controller design for singular stochastic Markov jump systems with state dependent noise. J. Syst. Sci. Complex. 2016, 29, 946–958. [Google Scholar] [CrossRef]
- Ma, H.; Hou, T. A separation theorem for stochastic singular linear quadratic control problem with partial information. Acta Math. Appl. Sin. Engl. Ser. 2013, 29, 303–314. [Google Scholar] [CrossRef]
- Liu, X.; Li, Y.; Zhang, W. Stochastic linear quadratic optimal control with constraint for discrete-time systems. Appl. Math. Comput. 2014, 228, 264–270. [Google Scholar] [CrossRef]
- Wei, F.; Geritz, S.A.H.; Cai, J. A stochastic single-species population model with partial pollution tolerance in a polluted environment. Appl. Math. Lett. 2017, 63, 130–136. [Google Scholar] [CrossRef]
- Liu, Q.; Jiang, D. Stationary distribution and extinction of a stochastic SIR model with nonlinear perturbation. Appl. Math. Lett. 2017, 73, 8–15. [Google Scholar] [CrossRef]
- Liu, M.; He, X.; Yu, J. Dynamics of a stochastic regime-switching predator-prey model with harvesting and distributed delays. Nonlinear Anal. Hybrid Syst. 2018, 28, 87–104. [Google Scholar] [CrossRef]
- Gao, S.; Chen, L.; Nieto, J.; Torres, A. Analysis of a delayed epidemic model with pulse vaccination and saturation incidence. Vaccine 2006, 24, 6037–6045. [Google Scholar] [CrossRef] [PubMed]
- Miao, A.; Zhang, J.; Zhang, T. Sampath Aruna Pradeep, B.G. Threshold dynamics of a stochastic SIR model with vertical transmission and vaccination. Comput. Math. Methods Med. 2017, 2017, 4820183. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.; Jiang, D. The threshold of a stochastic SIS epidemic model with vaccination. Appl. Math. Comput. 2014, 243, 718–727. [Google Scholar] [CrossRef]
- Meng, X.; Chen, L.; Wu, B. A delay SIR epidemic model with pulse vaccination and incubation times. Nonlinear Anal. Real World Appl. 2010, 11, 88–98. [Google Scholar] [CrossRef]
- Gao, S.; Zhong, D.; Zhang, Y. Analysis of novel stochastic switched SILI epidemic models with continuous and impulsive control. Phys. A 2018, 495, 162–171. [Google Scholar] [CrossRef]
- Leng, X.; Feng, T.; Meng, X. Stochastic inequalities and applications to dynamics analysis of a novel SIVS epidemic model with jumps. J. Inequal. Appl. 2017, 1, 138. [Google Scholar] [CrossRef] [PubMed]
- Sun, C.; Hsieh, Y.H. Global analysis of an SEIR model with varying population size and vaccination. Appl. Math. Model. 2010, 34, 2685–2697. [Google Scholar] [CrossRef]
- Zhao, Y.; Jiang, D.; Mao, X.; Gray, A. The threshold of a stochastic SIRS epidemic model in a population with varying size. Discrete Contin. Dyn. Syst. Ser. B 2015, 20, 1277–1295. [Google Scholar] [CrossRef]
- Chen, L.; Wei, F. Persistence and distribution of a stochastic susceptible-infected-removed epidemic model with varying population size. Phys. A 2017, 483, 386–397. [Google Scholar] [CrossRef]
- Meng, X.; Zhao, S.; Feng, T.; Zhang, T. Dynamics of a novel nonlinear stochastic SIS epidemic model with double epidemic hypothesis. J. Math. Anal. Appl. 2016, 433, 227–242. [Google Scholar] [CrossRef]
- Zhao, Y.; Yuan, S.; Zhang, T. The stationary distribution and ergodicity of a stochastic phytoplankton allelopathy model under regime switching. Commun. Nonlinear Sci. Numer. Simul. 2016, 37, 131–142. [Google Scholar] [CrossRef]
- Feng, T.; Meng, X.; Liu, L.; Gao, S. Application of inequalities technique to dynamics analysis of a stochastic eco-epidemiology model. J. Inequal. Appl. 2016, 2016, 327. [Google Scholar] [CrossRef]
- Liu, Q.; Jiang, D.; Shi, N.; Hayat, T.; Alsaedi, A. Stationary distribution and extinction of a stochastic SEIR epidemic model with standard incidence. Phys. A 2017, 476, 58–69. [Google Scholar] [CrossRef]
- Yu, J.; Liu, M. Stationary distribution and ergodicity of a stochastic food-chain model with Lévy jumps. Phys. A 2017, 482, 14–28. [Google Scholar] [CrossRef]
- Li, F.; Meng, X.; Wang, X. Analysis and Numerical Simulations of a Stochastic SEIQR Epidemic System with Quarantine-Adjusted Incidence and Imperfect Vaccination. Comput. Math. Methods Med. 2018, 2018, 7873902. [Google Scholar] [CrossRef] [PubMed]
- Mao, X. Stochastic Differential Equations and Applications, 2nd ed.; Horwood: Chichester, UK, 2008. [Google Scholar]
- Chang, Z.; Meng, X.; Lu, X. Analysis of a novel stochastic SIRS epidemic model with two different saturated incidence rates. Phys. A 2017, 472, 103–116. [Google Scholar] [CrossRef]
- Mattingly, J.C.; Stuart, A.M. Geometric ergodicity of some hypoelliptic diffusion for particle motions. Markov Process Related Fields 2002, 8, 199–214. [Google Scholar]
- Mattingly, J.C.; Stuart, A.M.; Higham, D.J. Ergodicity for SDEs and approximations: locally Lipschitz vector fields and degenerate noise. Stoch. Process. Appl. 2002, 101, 185–232. [Google Scholar] [CrossRef] [Green Version]
- Khasminskii, R.Z.; Milstein, G.N.; Nevelon, M.B. Stochastic Stability of Differential Equations; Springer: Berlin, Germany, 2012. [Google Scholar]
- Gard, T.C. Introduction to Stochastic Differential Equations; Dekker: New York, NY, USA, 1988. [Google Scholar]
- Zhu, C.; Yin, G. Asymptotic properties of hybrid diffusion systems. SIAM J. Control Optim. 2007, 46, 1155–1179. [Google Scholar] [CrossRef]



© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, X.; Li, F.; Meng, X. Dynamics Analysis of a Nonlinear Stochastic SEIR Epidemic System with Varying Population Size. Entropy 2018, 20, 376. https://doi.org/10.3390/e20050376
Han X, Li F, Meng X. Dynamics Analysis of a Nonlinear Stochastic SEIR Epidemic System with Varying Population Size. Entropy. 2018; 20(5):376. https://doi.org/10.3390/e20050376
Chicago/Turabian StyleHan, Xiaofeng, Fei Li, and Xinzhu Meng. 2018. "Dynamics Analysis of a Nonlinear Stochastic SEIR Epidemic System with Varying Population Size" Entropy 20, no. 5: 376. https://doi.org/10.3390/e20050376
APA StyleHan, X., Li, F., & Meng, X. (2018). Dynamics Analysis of a Nonlinear Stochastic SEIR Epidemic System with Varying Population Size. Entropy, 20(5), 376. https://doi.org/10.3390/e20050376