Characterization of the Stroke-Induced Changes in the Variability and Complexity of Handgrip Force


Abstract
:1. Introduction
2. Materials and Methods
2.1. Subject Selection
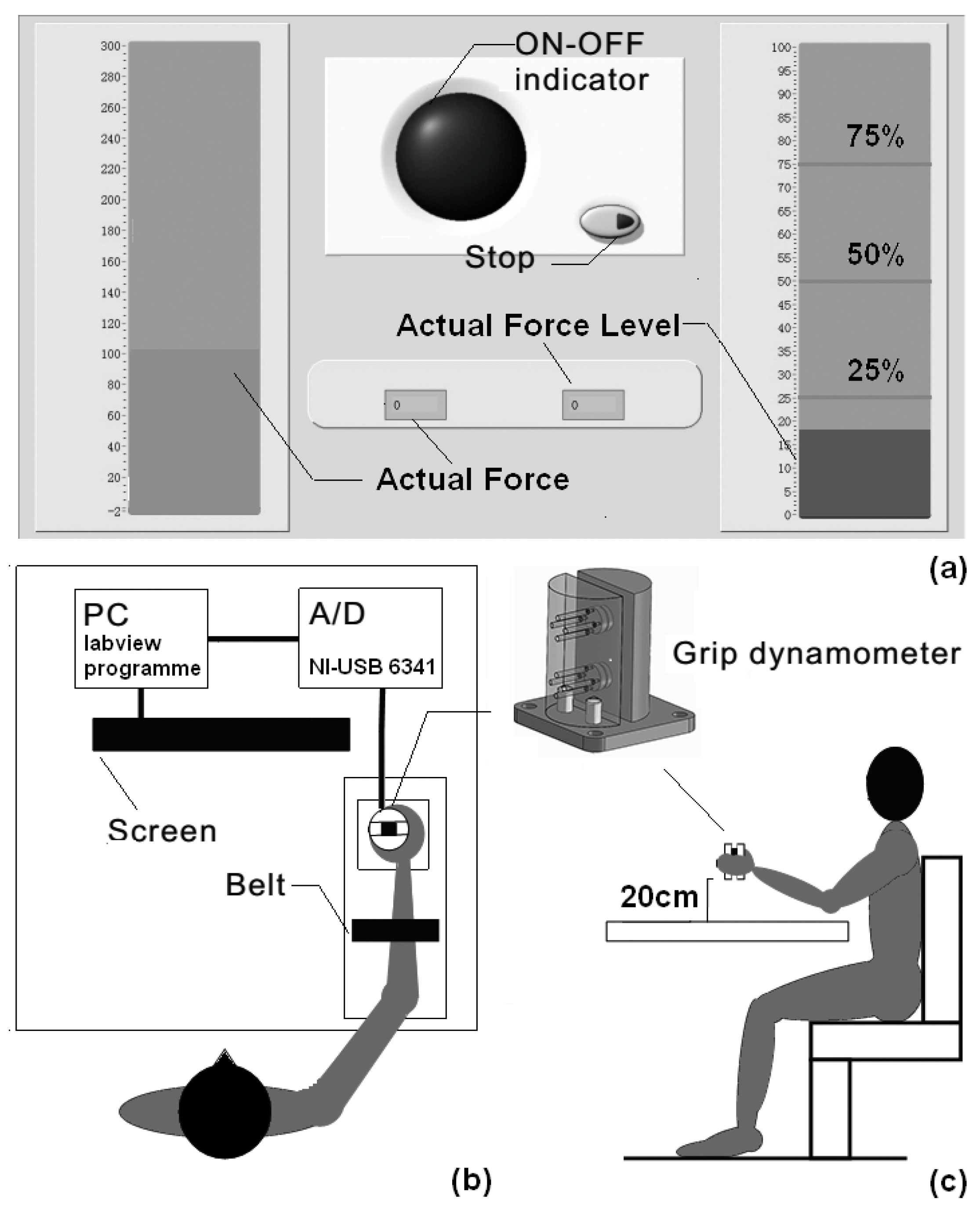
2.2. Apparatus and Procedure
2.3. Data Analysis
2.4. Statistics
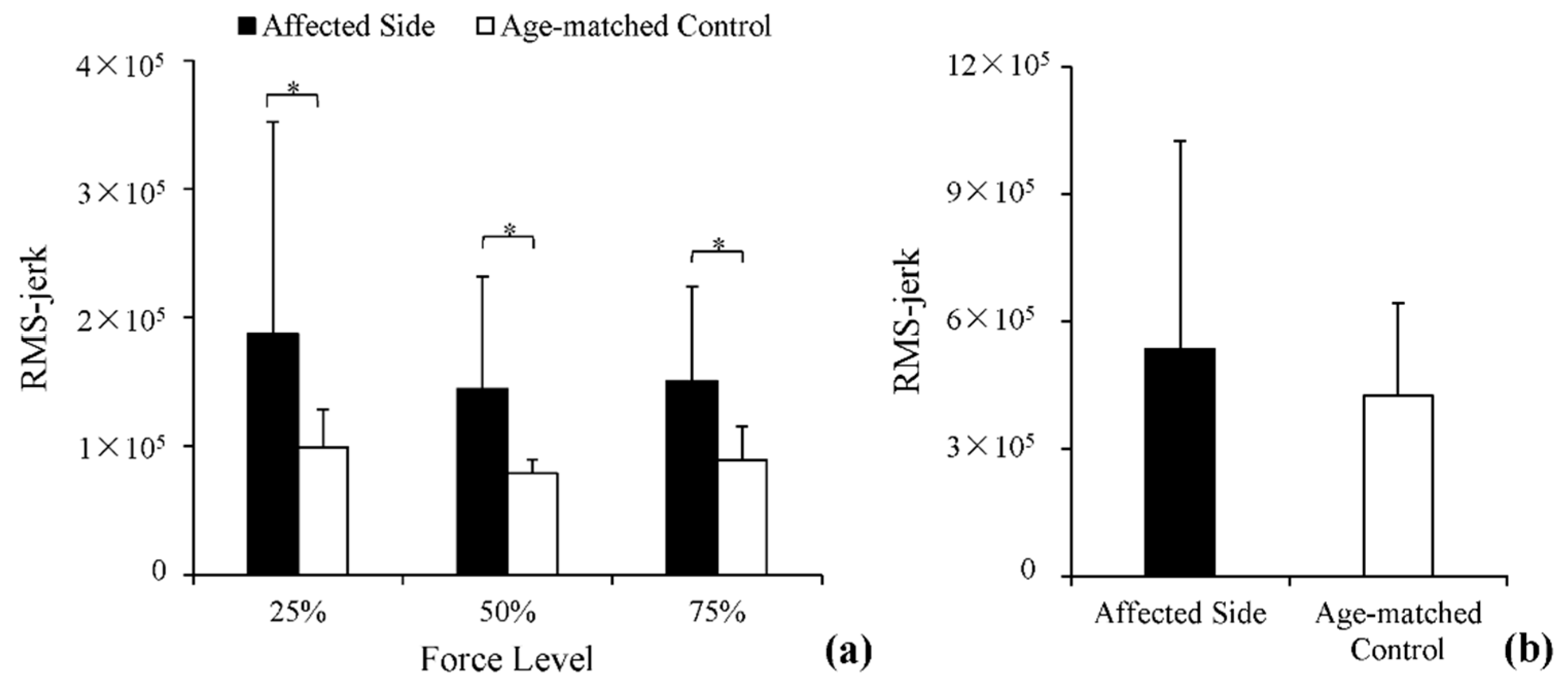
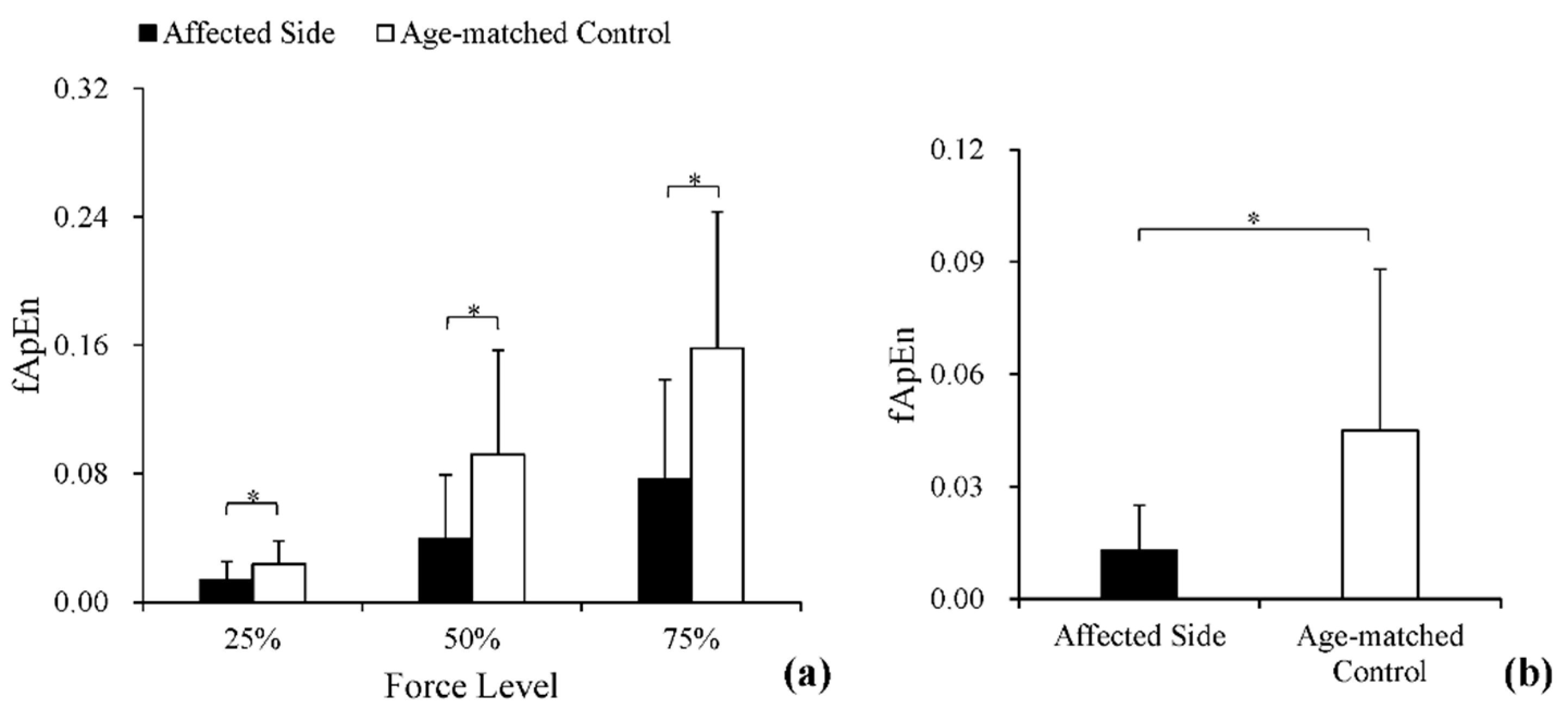
3. Results
4. Discussion
4.1. The Variability of Force Modulation after Stroke
4.2. The Complexity of Force Modulation after Stroke
4.3. Clinical Implications
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
Abbreviations
| RMS-jerk | root mean square jerk |
| fApEn | fuzzy approximate entropy |
| FMA-UE | Fugl-Meyer upper extremity assessment |
| WMFT | Wolf motor function test |
| MGF | maximal grip force |
| ANOVA | analysis of variance |
| MAS | modified Ashworth scale |
References
- Hermsdörfer, J.; Hagl, E.; Nowak, D.A. Deficits of anticipatory grip force control after damage to peripheral and central sensorimotor systems. Hum. Mov. Sci. 2004, 23, 643–662. [Google Scholar] [CrossRef] [PubMed]
- Quaney, B.M.; Perera, S.; Maletsky, R.; Luchies, C.W.; Nudo, R.J. Impaired grip force modulation in the ipsilesional hand after unilateral middle cerebral artery stroke. Neurorehabil. Neural Repair 2005, 19, 338–349. [Google Scholar] [CrossRef] [PubMed]
- Ju, M.S.; Chen, J.J.; Lee, H.M.; Lin, T.S.; Lin, C.C.; Huang, Y.Z. Time-course analysis of stretch reflexes in hemiparetic subjects using an on-line spasticity measurement system. J. Electromyogr. Kinesiol. Off. J. Int. Soc. Electrophysiol. Kinesiol. 2000, 10, 1–14. [Google Scholar] [CrossRef]
- Song, R.; Tong, K.Y.; Hu, X.L. Evaluation of Velocity-Dependent Performance of the Spastic Elbow During Voluntary Movements. Arch. Phys. Med. Rehabil. 2008, 89, 1140–1145. [Google Scholar] [CrossRef] [PubMed]
- Sunderland, A.; Tinson, D.; Bradley, L.; Hewer, R.L. Arm function after stroke. An evaluation of grip strength as a measure of recovery and a prognostic indicator. J. Neurol. Neurosurg. Psychiatry 1989, 52, 1267–1272. [Google Scholar] [CrossRef] [PubMed]
- Boissy, P.; Bourbonnais, D.; Carlotti, M.M.; Gravel, D.; Arsenault, B.A. Maximal grip force in chronic stroke subjects and its relationship to global upper extremity function. Clin. Rehabil. 1999, 13, 354–362. [Google Scholar] [CrossRef] [PubMed]
- Ada, L.; Dorsch, S.; Canning, C.G. Strengthening interventions increase strength and improve activity after stroke: A systematic review. Aust. J. Physiother. 2006, 52, 241–248. [Google Scholar] [CrossRef]
- Chae, J.; Yang, G.; Park, B.K.; Labatia, I. Delay in initiation of muscle contraction, motor impairment, and physical disability in upper limb hemiparesis. Muscle Nerve 2002, 25, 568–575. [Google Scholar] [CrossRef] [PubMed]
- Chae, J.; Yang, G.; Park, B.K.; Labatia, I. Muscle weakness and cocontraction in upper limb hemiparesis: Relationship to motor impairment and physical disability. Neurorehabil. Neural Repair 2002, 16, 241–248. [Google Scholar] [CrossRef] [PubMed]
- Pandyan, A.D.; Cameron, M.; Powell, J.; Stott, D.J.; Granat, M.H. Contractures in the post-stroke wrist: A pilot study of its time course of development and its association with upper limb recovery. Clin. Rehabil. 2003, 17, 88–95. [Google Scholar] [CrossRef] [PubMed]
- Ye, Y.; Ma, L.; Yan, T.; Liu, H.; Wei, X.; Song, R. Kinetic measurements of hand motor impairments after mild to moderate stroke using grip control tasks. J. Neuroeng. Rehabil. 2014, 11, 84. [Google Scholar] [CrossRef] [PubMed]
- Sethi, A.; Patterson, T.; Mcguirk, T.; Patten, C.; Richards, L.G.; Stergiou, N. Temporal structure of variability decreases in upper extremity movements post stroke. Clin. Biomech. 2013, 28, 134–139. [Google Scholar] [CrossRef] [PubMed]
- Lodha, N.; Naik, S.K.; Coombes, S.A.; Cauraugh, J.H. Force control and degree of motor impairments in chronic stroke. Clin. Neurophysiol. Off. J. Int. Fed. Clin. Neurophysiol. 2010, 121, 1952–1961. [Google Scholar] [CrossRef] [PubMed]
- Kim, N.H.; Wininger, M.; Craelius, W. Training grip control with a Fitts' paradigm: A pilot study in chronic stroke. J. Hand Ther. 2010, 23, 63–72. [Google Scholar] [CrossRef] [PubMed]
- Smith, M.A.; Brandt, J.; Shadmehr, R. Motor disorder in Huntington's disease begins as a dysfunction in error feedback control. Nature 2000, 403, 544–549. [Google Scholar] [CrossRef] [PubMed]
- Teulings, H.L.; Contreras-Vidal, J.L.; Stelmach, G.E.; Adler, C.H. Parkinsonism reduces coordination of fingers, wrist, and arm in fine motor control. Exp. Neurol. 1997, 146, 159–170. [Google Scholar] [CrossRef] [PubMed]
- Miall, R.C.; Weir, D.J.; Stein, J.F. Intermittency in human manual tracking tasks. J. Mot. Behav. 1993, 25, 53–63. [Google Scholar] [CrossRef] [PubMed]
- Kawato, M. Internal models for motor control and trajectory planning. Curr. Opin. Neurobiol. 1999, 9, 718–727. [Google Scholar] [CrossRef]
- Nataraj, R.; Pasluosta, C.; Li, Z.M. Online kinematic regulation by visual feedback for grasp versus transport during reach-to-pinch. Hum. Mov. Sci. 2014, 36, 134–153. [Google Scholar] [CrossRef] [PubMed]
- Young, R.P.; Marteniuk, R.G. Acquisition of a multi-articular kicking task: Jerk analysis demonstrates movements do not become smoother with learning. Hum. Mov. Sci. 1997, 16, 677–701. [Google Scholar] [CrossRef]
- Hogan, N.; Sternad, D. Sensitivity of smoothness measures to movement duration, amplitude, and arrests. J. Mot. Behav. 2009, 41, 529–534. [Google Scholar] [CrossRef] [PubMed]
- Hong, S.L.; Newell, K.M. Entropy compensation in human motor adaptation. Chaos 2008, 18, 387–416. [Google Scholar] [CrossRef] [PubMed]
- Vaillancourt, D.E.; Newell, K.M. Aging and the time and frequency structure of force output variability. J. Appl. Physiol. 2003, 94, 903–912. [Google Scholar] [CrossRef] [PubMed]
- Hong, S.L.; Newell, K.M. Motor entropy in response to task demands and environmental information. Chaos 2008, 18, 113–131. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Ren, X.; Gao, X.; Chen, X.; Zhou, P. Complexity Analysis of Surface EMG for Overcoming ECG Interference toward Proportional Myoelectric Control. Entropy 2016, 18, 106. [Google Scholar] [CrossRef]
- Aktaruzzaman, M. Low Computational Cost for Sample Entropy. Entropy 2018, 20, 61. [Google Scholar]
- Simons, S.; Espino, P.; Abásolo, D. Fuzzy Entropy Analysis of the Electroencephalogram in Patients with Alzheimer’s Disease: Is the Method Superior to Sample Entropy? Entropy 2018, 20, 21. [Google Scholar] [CrossRef]
- Sun, W.; Liang, J.; Yang, Y.; Wu, Y.; Yan, T.; Song, R. Investigating Aging-Related Changes in the Coordination of Agonist and Antagonist Muscles Using Fuzzy Entropy and Mutual Information. Entropy 2016, 18, 229. [Google Scholar] [CrossRef]
- Wu, Y.; Song, R. Effects of Task Demands on Kinematics and EMG Signals during Tracking Tasks Using Multiscale Entropy. Entropy 2017, 19, 307. [Google Scholar] [CrossRef]
- Gladstone, D.J.; Danells, C.J.; Black, S.E. The Fugl-Meyer Assessment of Motor Recovery after Stroke: A Critical Review of Its Measurement Properties. Neurorehabil. Neural Repair 2002, 16, 232–240. [Google Scholar] [CrossRef] [PubMed]
- Wolf, S.L.; Catlin, P.A.; Ellis, M.; Archer, A.L.; Morgan, B.; Piacentino, A. Assessing Wolf Motor Function Test as Outcome Measure for Research in Patients After Stroke. Stroke 2001, 32, 1635–1639. [Google Scholar] [CrossRef] [PubMed]
- Bohannon, R.W.; Smith, M.B. Interrater Reliability of a Modified Ashworth Scale of Muscle Spasticity. Phys. Ther. 1987, 67, 206–207. [Google Scholar] [CrossRef] [PubMed]
- Xie, H.B.; Guo, J.Y.; Zheng, Y.P. Fuzzy approximate entropy analysis of chaotic and natural complex systems: Detecting muscle fatigue using electromyography signals. Ann. Biomed. Eng. 2010, 38, 1483–1496. [Google Scholar] [CrossRef] [PubMed]
- Ao, D.; Sun, R.; Tong, K.Y.; Song, R. Characterization of Stroke- and Aging-Related Changes in the Complexity of EMG Signals During Tracking Tasks. Ann. Biomed. Eng. 2015, 43, 990–1002. [Google Scholar] [CrossRef] [PubMed]
- Xiong, G.L.; Zhang, L.; Liu, H.S.; Zou, H.J.; Guo, W.Z. A comparative study on ApEn, SampEn and their fuzzy counterparts in a multiscale framework for feature extraction. J. Zhejiang Univ. Sci. A 2010, 11, 270–279. [Google Scholar] [CrossRef]
- Reinkensmeyer, D.; Iobbi, M.; Kahn, L.; Kamper, D. Modeling Reaching Impairment After Stroke Using a Population Vector Model of Movement Control That Incorporates Neural Firing-Rate Variability. Neural Comput. 2003, 15, 2619–2642. [Google Scholar] [CrossRef] [PubMed]
- Mccrea, P.H.; Eng, J.J. Consequences of increased neuromotor noise for reaching movements in persons with stroke. Exp. Brain Res. 2005, 162, 70–77. [Google Scholar] [CrossRef] [PubMed]
- Beer, R.F.; Dewald, J.P.; Rymer, W.Z. Deficits in the coordination of multijoint arm movements in patients with hemiparesis: Evidence for disturbed control of limb dynamics. Exp. Brain Res. 2000, 131, 305–319. [Google Scholar] [CrossRef] [PubMed]
- Nyeonju, K.; Cauraugh, J.H. Bimanual force variability in chronic stroke: With and without visual information. Neurosci. Lett. 2015, 587, 41–45. [Google Scholar]
- Kamper, D.G.; Rymer, W.Z. Quantitative features of the stretch response of extrinsic finger muscles in hemiparetic stroke. Muscle Nerve 2000, 23, 954–961. [Google Scholar] [CrossRef]
- Afaneh, A.A.; Ibrahim, R.A. Nonlinear response of an initially buckled beam with 1:1 internal resonance to sinusoidal excitation. Nonlinear Dyn. 1993, 4, 547–571. [Google Scholar] [CrossRef]
- Lin, C.C.; Ju, M.S.; Lin, C.W. The pendulum test for evaluating spasticity of the elbow joint. Arch. Phys. Med. Rehabil. 2003, 84, 69–74. [Google Scholar] [CrossRef] [PubMed]
- Kirchner, M.; Schubert, P.; Getrost, T.; Haas, C.T. Effect of altered surfaces on postural sway characteristics in elderly subjects. Hum. Mov. Sci. 2013, 32, 1467–1479. [Google Scholar] [CrossRef] [PubMed]
- Basafa, E.; Heidari, Z.; Tamaddoni, H.; Mirbagheri, A.; Haddad, O.; Parnianpour, M. The Effect of Fatigue on Recurrence Parameters of Postural Sway. J. Biomech. 2007, 40 (Suppl. 2), S362. [Google Scholar] [CrossRef]
- Kang, N.; Cauraugh, J.H. Force control in chronic stroke. Neurosci. Biobehav. Rev. 2015, 52, 38–48. [Google Scholar] [CrossRef] [PubMed]
- Hsieh, T.Y.; Pacheco, M.M.; Newell, K.M. Entropy of space-time outcome in a movement speed-accuracy task. Hum. Mov. Sci. 2015, 44, 201–210. [Google Scholar] [CrossRef] [PubMed]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Subject | Sex | Age (Year) | Duration (Month) | Affected Hemisphere | Assessment Scale | ||
|---|---|---|---|---|---|---|---|
| FMA-UE (0–66) | WMFT (0–75) | MAS (0–6) | |||||
| 1 | F | 63 | 3 | R | 61 | 62 | 1 |
| 2 | M | 40 | 4 | R | 63 | 67 | 1 |
| 3 | M | 22 | 1.5 | R | 51 | 56 | 1 |
| 4 | F | 52 | 2.5 | L | 64 | 71 | 0 |
| 5 | M | 73 | 1 | L | 48 | 50 | 0 |
| 6 | M | 64 | 2.5 | L | 60 | 57 | 0 |
| 7 | M | 49 | 2 | R | 65 | 73 | 0 |
| 8 | M | 72 | 6 | R | 65 | 72 | 0 |
| 9 | F | 63 | 5 | R | 42 | 46 | 0 |
| 10 | M | 59 | 4.5 | L | 56 | 60 | 1 |
| 11 | M | 37 | 2 | L | 46 | 48 | 3 |
| FMA-UE | WMFT | ||
|---|---|---|---|
| Power-Grip Tasks | fApEn | ||
| 25% MGF | 0.202 | 0.113 | |
| 50% MGF | 0.211 | 0.290 | |
| 75% MGF | 0.091 | 0.007 | |
| RMS-jerk | |||
| 25% MGF | −0.761 ** | −0.689 * | |
| 50% MGF | −0.869 ** | −0.777 ** | |
| 75% MGF | −0.754 ** | −0.712 * | |
| Stationary Holding Tasks | fApEn | 0.230 | 0.282 |
| RMS-jerk | −0.243 | −0.250 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, P.; Wu, Y.; Liang, J.; Ye, Y.; Liu, H.; Yan, T.; Song, R. Characterization of the Stroke-Induced Changes in the Variability and Complexity of Handgrip Force. Entropy 2018, 20, 377. https://doi.org/10.3390/e20050377
Zhu P, Wu Y, Liang J, Ye Y, Liu H, Yan T, Song R. Characterization of the Stroke-Induced Changes in the Variability and Complexity of Handgrip Force. Entropy. 2018; 20(5):377. https://doi.org/10.3390/e20050377
Chicago/Turabian StyleZhu, Pengzhi, Yuanyu Wu, Jingtao Liang, Yu Ye, Huihua Liu, Tiebin Yan, and Rong Song. 2018. "Characterization of the Stroke-Induced Changes in the Variability and Complexity of Handgrip Force" Entropy 20, no. 5: 377. https://doi.org/10.3390/e20050377
APA StyleZhu, P., Wu, Y., Liang, J., Ye, Y., Liu, H., Yan, T., & Song, R. (2018). Characterization of the Stroke-Induced Changes in the Variability and Complexity of Handgrip Force. Entropy, 20(5), 377. https://doi.org/10.3390/e20050377