Novel Bioinspired Approach Based on Chaotic Dynamics for Robot Patrolling Missions with Adversaries



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Problem Formulation
3. Additional Waypoints Generation Algorithm
3.1. Preliminaries
3.2. Arnold’s Cat Map
3.3. Emulating Zig-Zag Movements
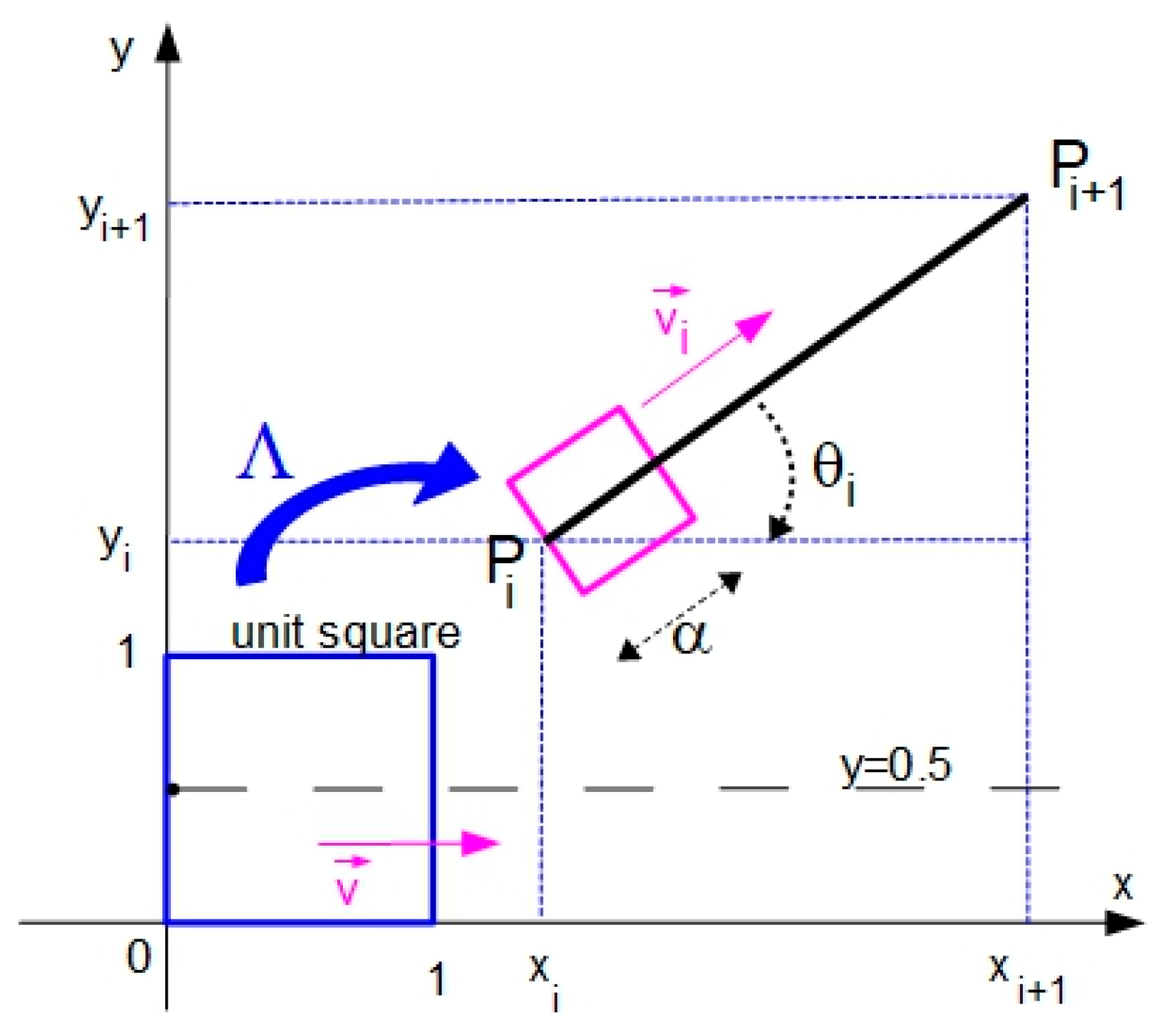
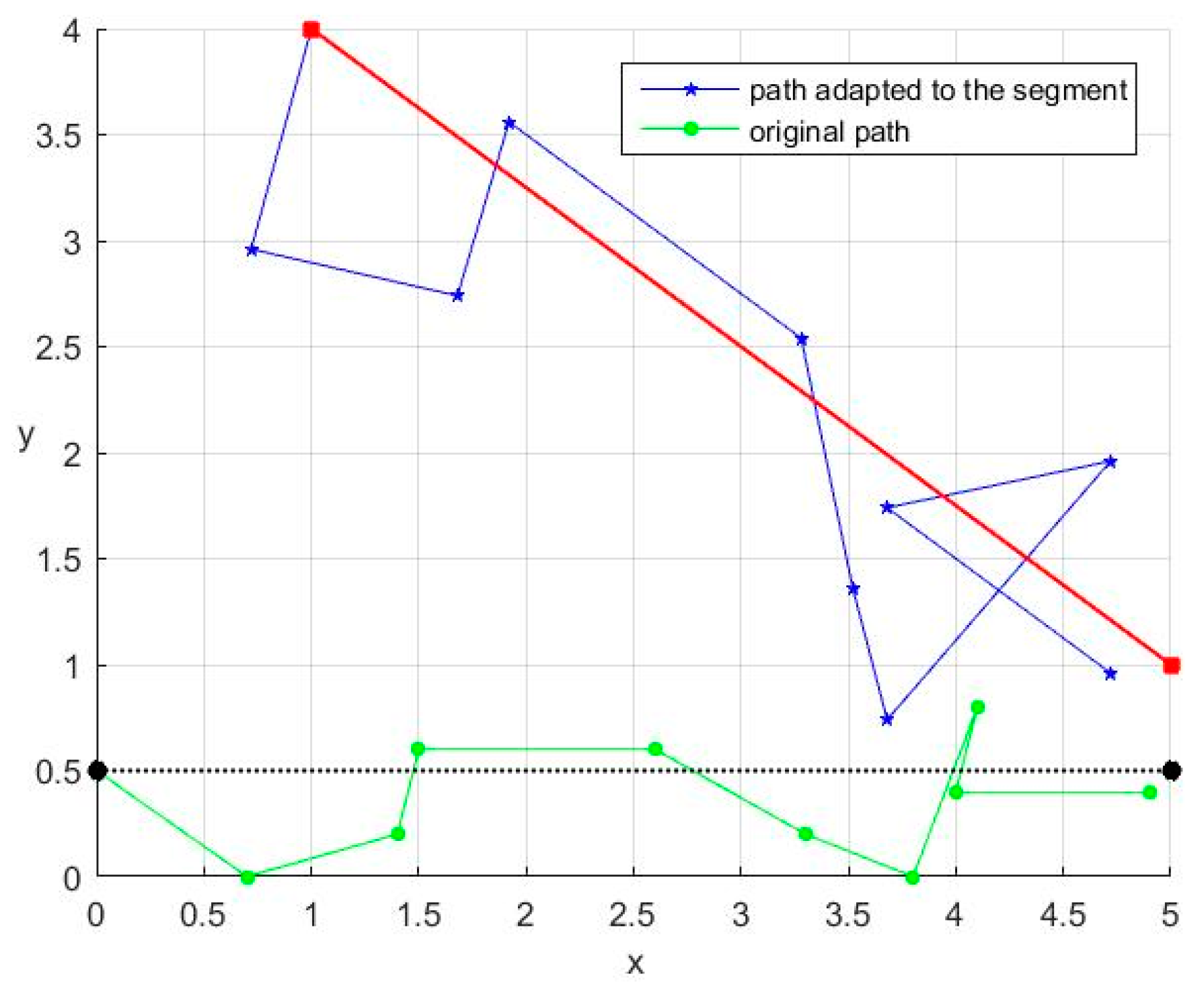
3.4. Adapting the Zig-Zag to a General Segment of Robot Trajectory
3.5. Pseudocode of AWG Algorithm
| 1. [Qi,1, …Qi,M,, ] = AWG (Pi, Pi+1, Mi,, v,,) 2. { 3. ; 4. ; 5. ; 6. forj = 1 to Mi 7. iterate system (7); 8. returnQi,1, …Qi,M, , ; 9. } |
4. Patrolling Method Implementation
- set of fixed waypoints along the unaltered route (Pi, i = 1, …, N) and the maximum time to accomplish the mission (tmax); These parameters are the basic descriptors of the robot’s patrolling mission and their selection is closely linked with mission’s objectives and constraints.
- initial values for ACM ; As mentioned in Section 3.2, we must choose to obtain a chaotic behavior, an appropriate selection being ;
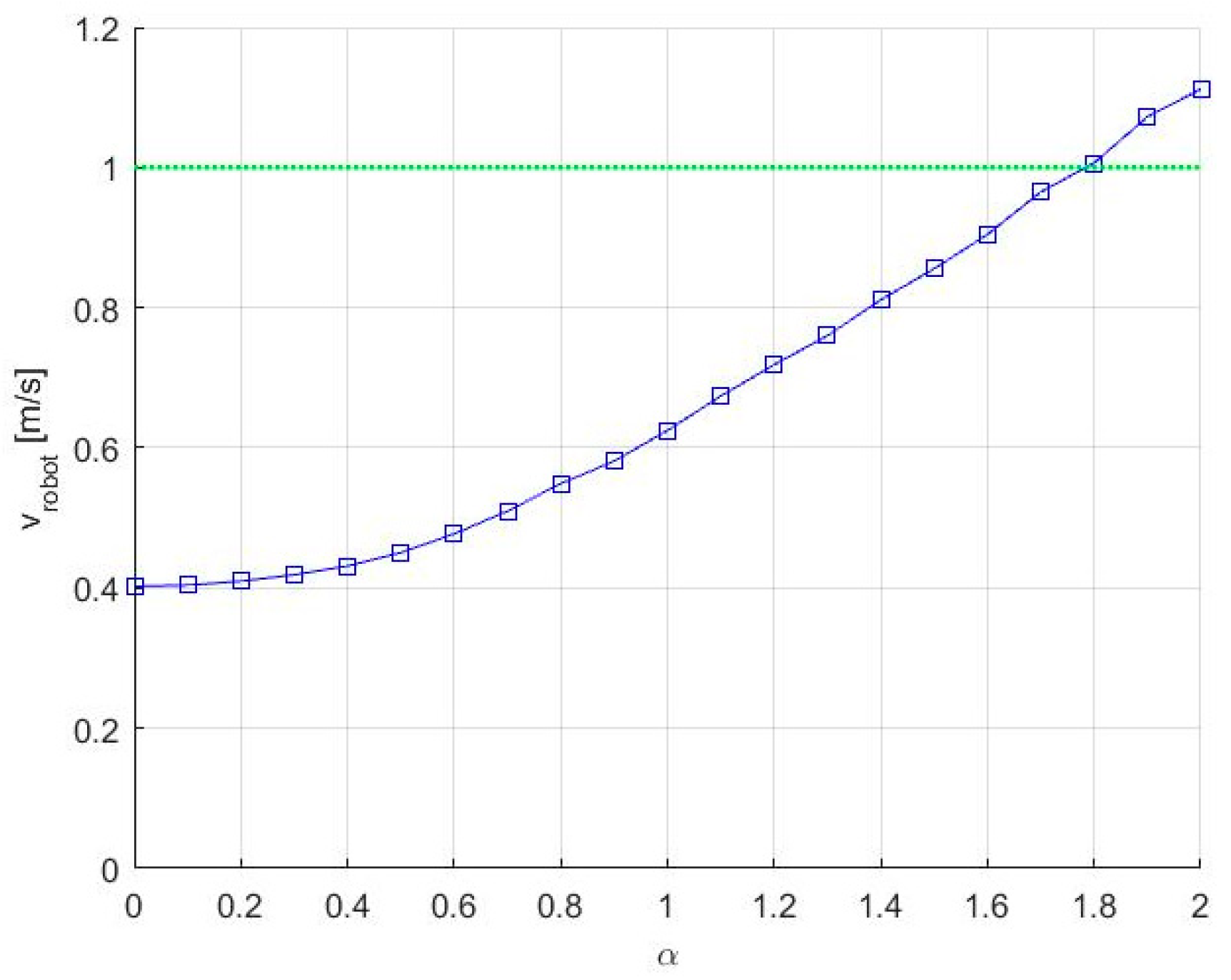
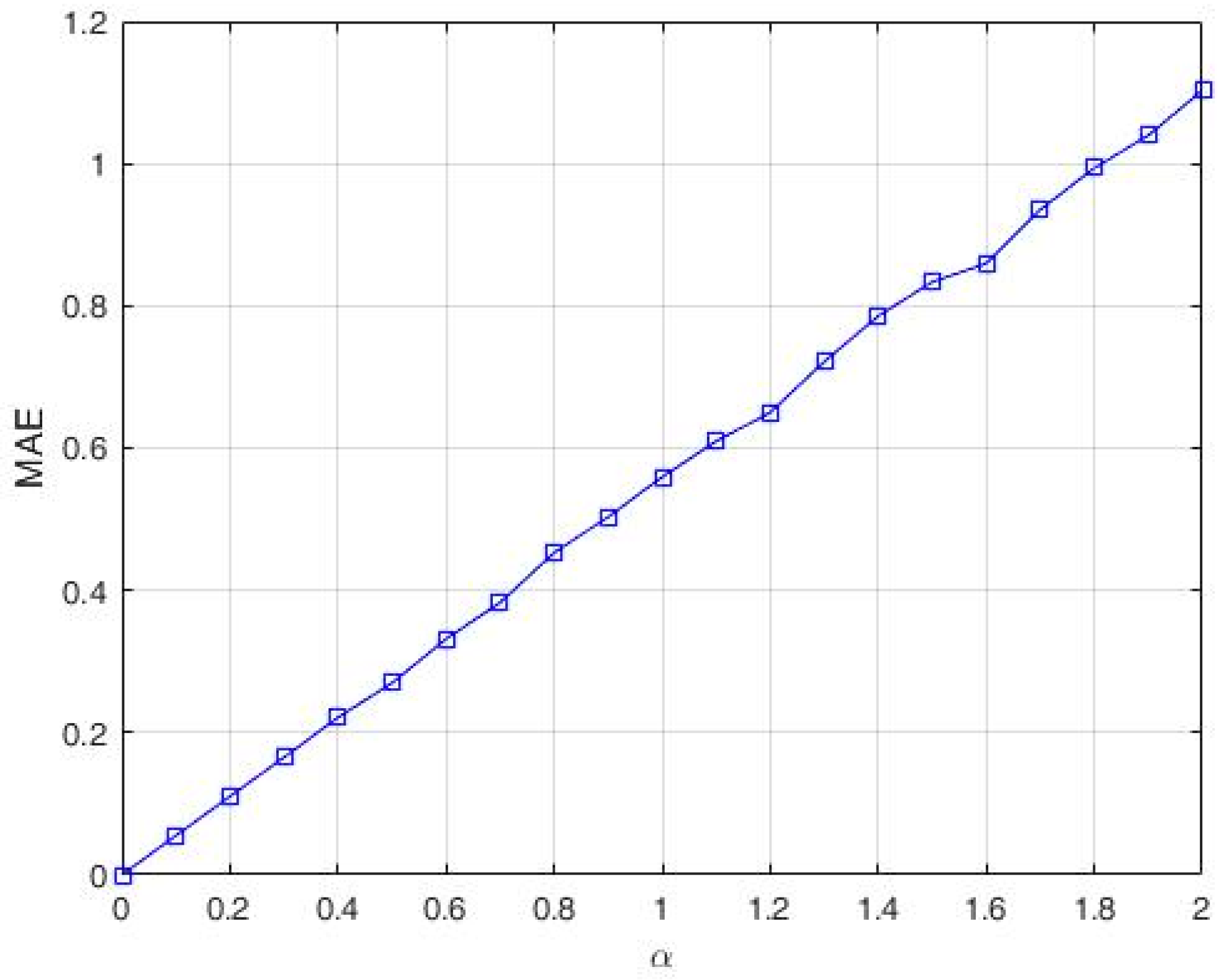
- parameter ; In order to select the value that characterizes the spreading of the additional waypoints, two aspects must be considered: (a) a higher value for will provide a higher unpredictability to the robot path; and (b) a higher value for will need a higher robot speed to accomplish the mission in the required time (tmax). Knowing the robot’s speed (has to be as high as possible to increase the effectiveness of the method), we can compute an estimate of the maximum value for (denoted with ) by simulating a sufficiently long altered path (our method provides a random-looking sequence of waypoints, which basically depends on initialization values for ACM, so the covered distance may vary) to obtain a better approximation. Having the estimate we can select a value usinga practical example being given in Section 5.
- the magnitude of the speed v (average speed to cover the unaltered path) can be computed using:where d is the distance covered by the robot on the reference (unaltered) path and can be calculated by summing the length of all segments PiPi+1 with i = 1, …, N − 1;
- The number Mi of additional waypoints is influenced by the length of the segment PiPi+1 and the magnitude of the speed v used to traverse this segment.where the time to cover each of the subdivision of the segment PiPi+1 is equal to one time sample (), while the notation ⌊⌋ denotes the floor function, also known as greatest integer function.
| 1. initialize {Pi, i = 1, …, N }, , , tmax 2. compute v; // Equation (9) is used 3. for (i = 1; i < N; i++) 4. compute Mi; //compute the number of additional waypoints for PiPi+1 segment using Equation (10) 5. start moving; 6. for (i = 1; i < N; i++){ 7. { 8. [Qi,1,…Qi,M, , ] = AWG(Pi, Pi+1, Mi, , v, ,); // generates additional the waypoints 9. for (k = 1; k <= Mi; k++) 10. Move_towards_waypoint(Qi,k); //the robot is heading towards the additional waypoint 11. Move_towards_waypoint(Pi+1); //the robot is heading towards the end of the segment 12. = ; //prepare the initialization parameters for the following line segment 13. = ; 14. } |
5. Simulation Results
5.1. First Case Study
- (a)
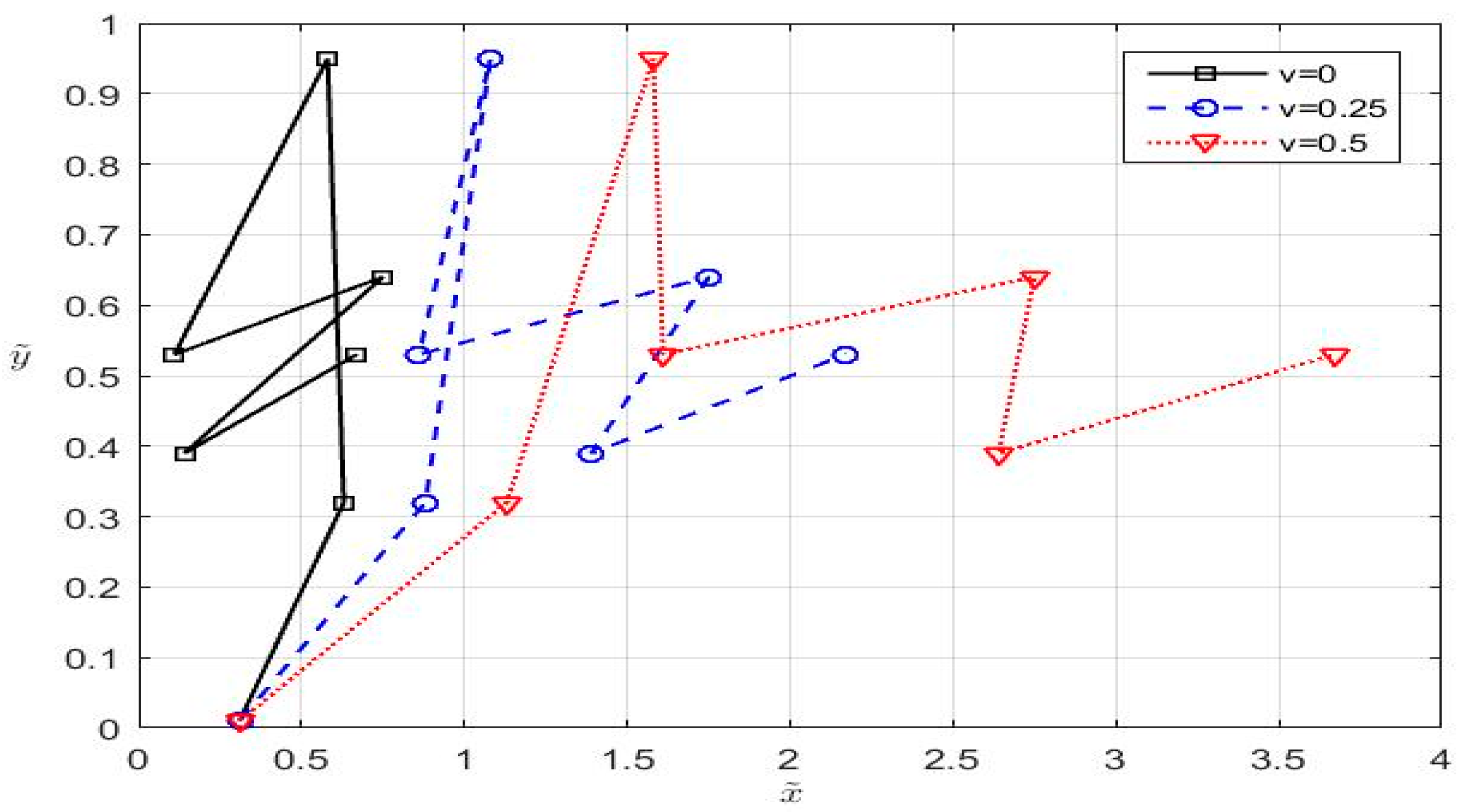
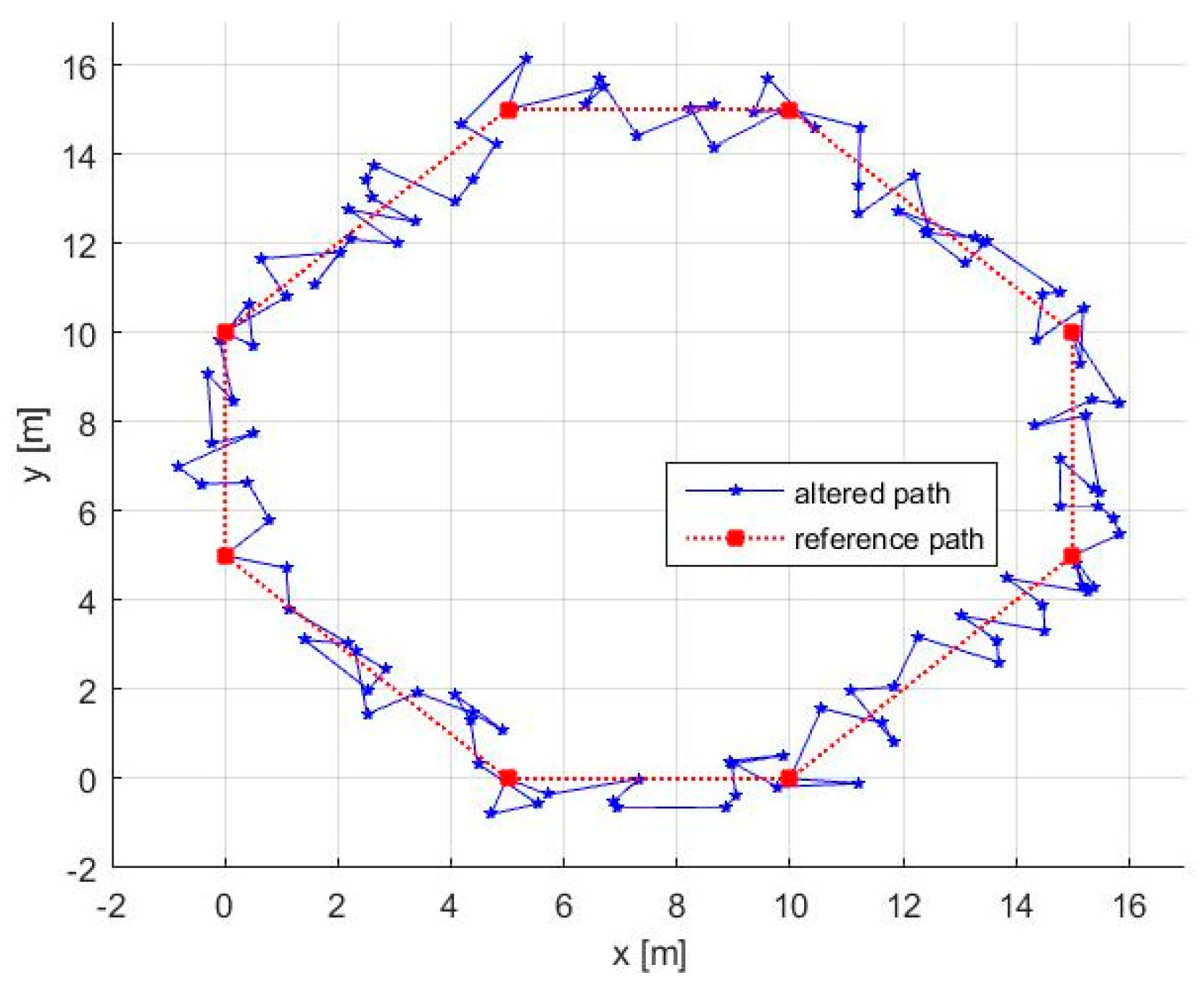
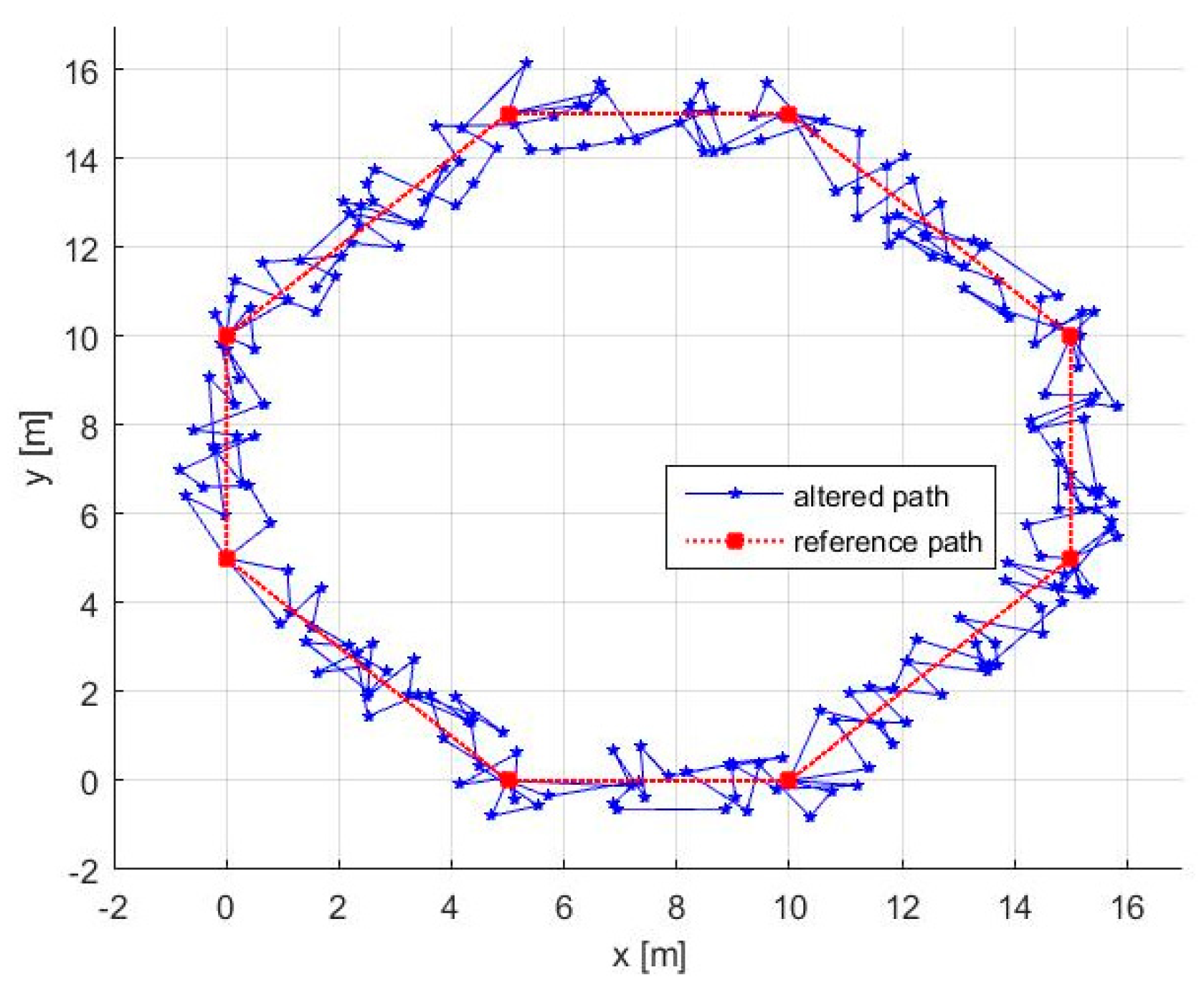
- As presented in Figure 7, in many circumstances, the altered path has a “go-backward” component. This can be observed anytime , this inequality being a direct result of the way AWG was designed. In our case, using Equation (9), we obtain v = 0.4024, so the mentioned inequality is satisfied.
- (b)
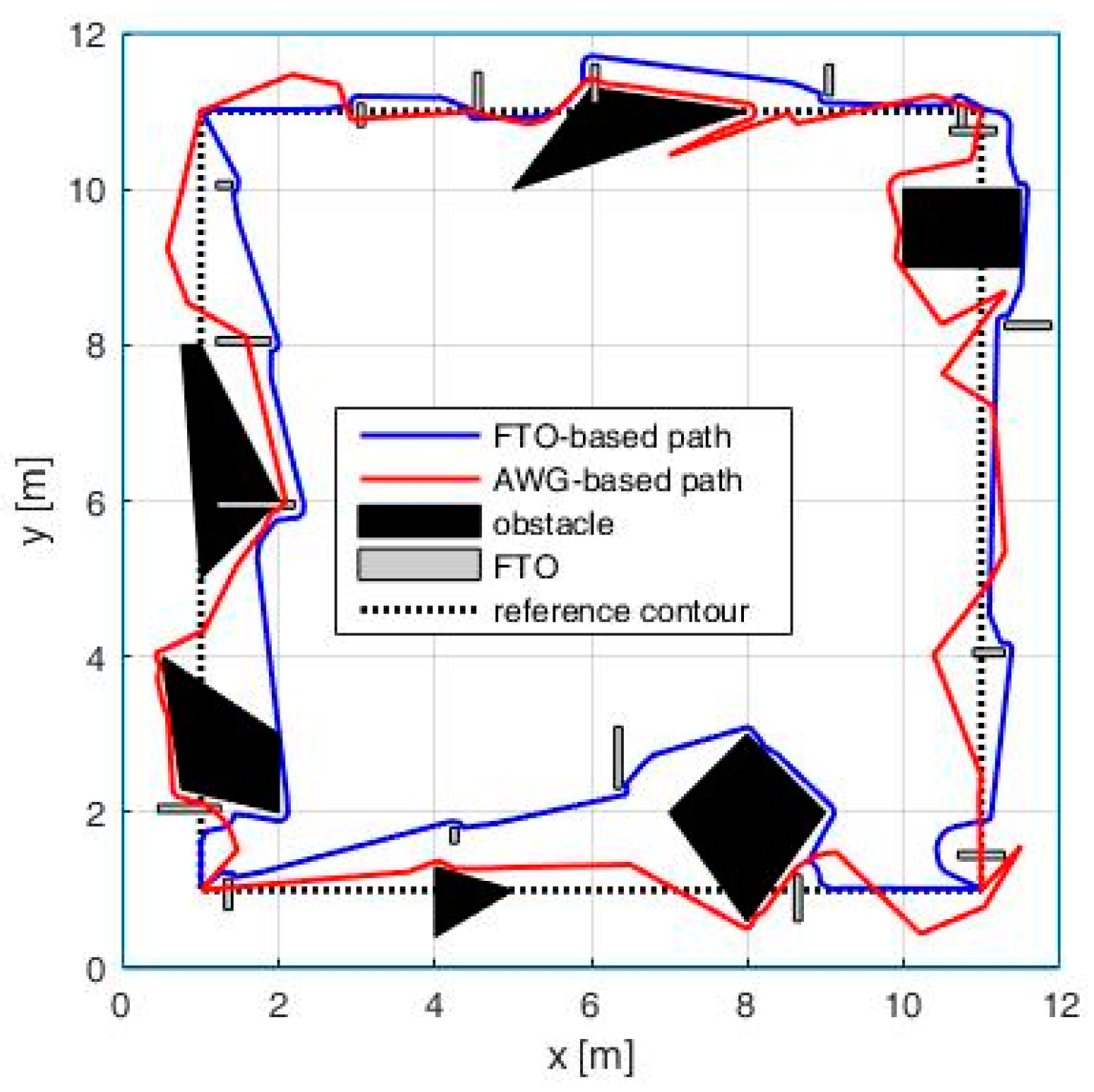
- Theoretically, the path always touches the initial waypoints. In practice, the robot has an allowed position error range, which means that the waypoints are considered as reached when the robot is within a circle around the waypoint with a radius smaller than the allowed position error.
- (c)
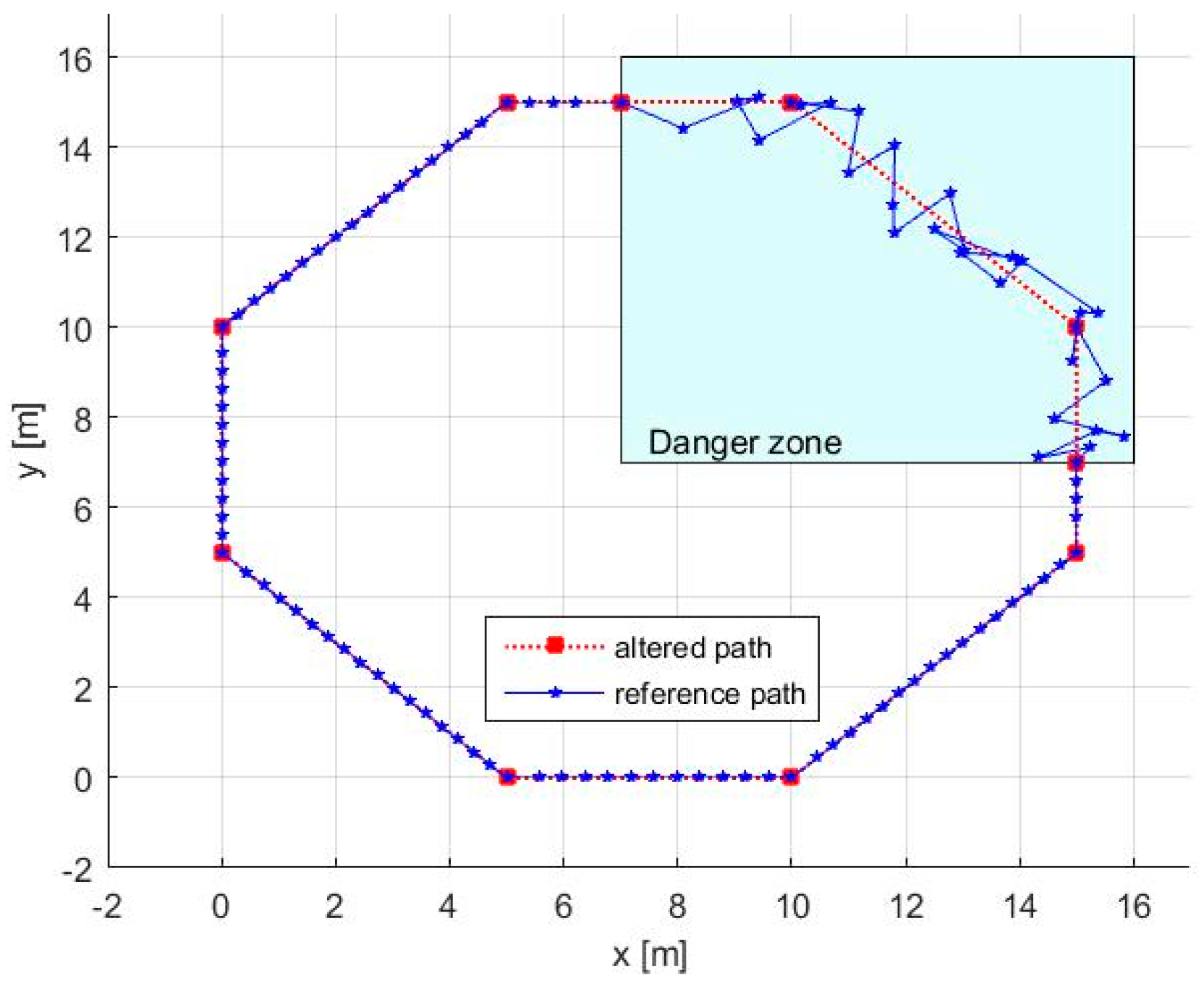
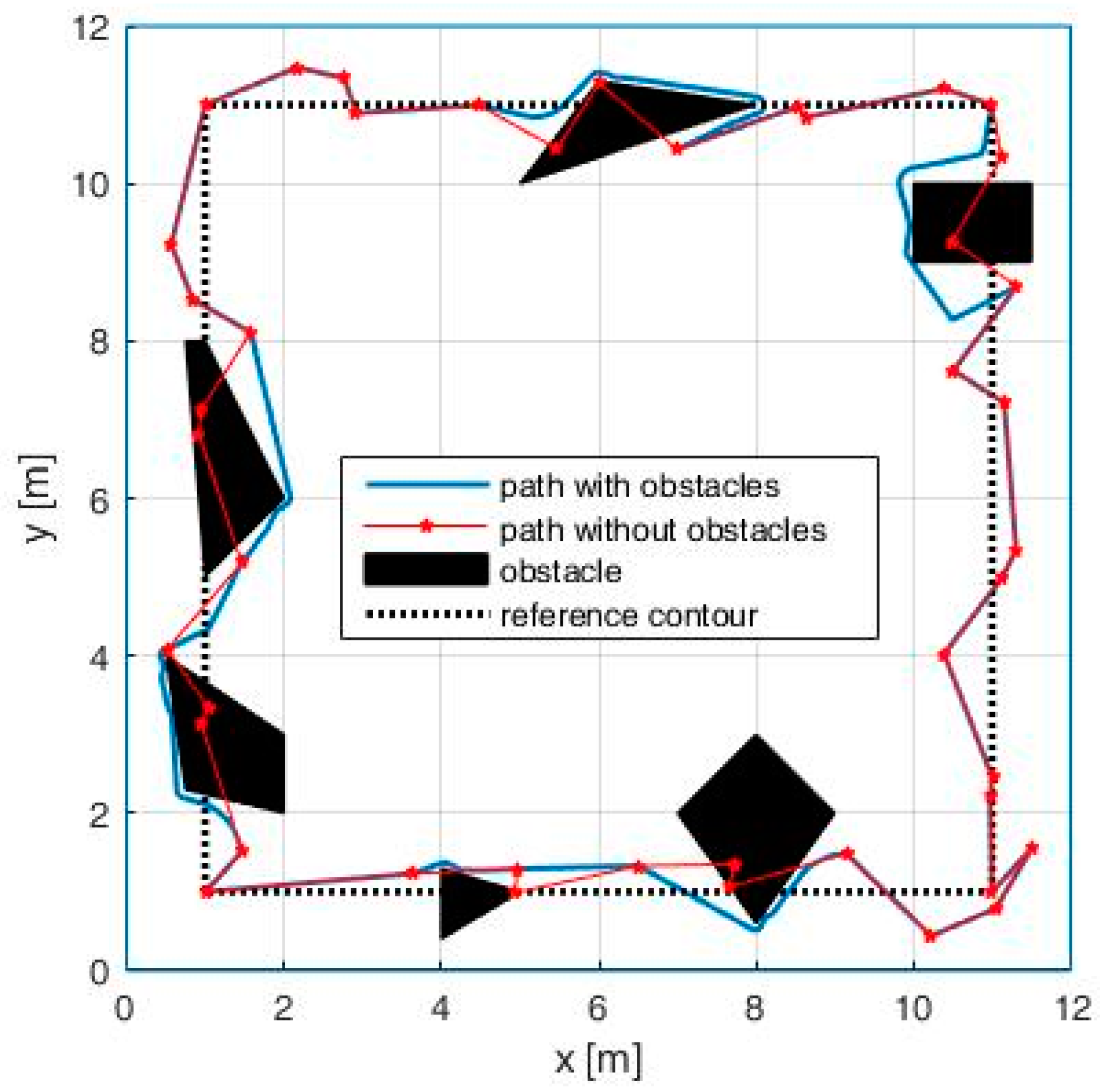
- The method can simply deal with missions where only some parts of the path are under threat. In this case, we need: (i) to set initial waypoints anytime the robot enters or leaves the danger zone; and (ii) to generate additional waypoints using our method only for the segments that lay inside the danger zone (Figure 8).
5.2. Second Case Study
6. Conclusions
Author Contributions
Conflicts of Interest
References
- Shannon, C.E. A Mathematical Theory of Communication. Bell Syst. Tech. J. 1948, 27, 379–423, 623–656. [Google Scholar] [CrossRef]
- Cover, T.M.; Thomas, J.A. Elements of Information Theory; Wiley: Hoboken, NJ, USA, 2012. [Google Scholar]
- Pal, N.R.; Pal, S.K. Entropy: A new definition and its applications. IEEE Trans. Syst. Man Cybern. 1991, 21, 1260–1270. [Google Scholar] [CrossRef]
- Roberts, S.; Guilford, T.; Rezek, I.; Biro, D. Positional entropy during pigeon homing I: Application of Bayesian latent state modelling. J. Theor. Biol. 2004, 227, 39–50. [Google Scholar] [CrossRef] [PubMed]
- Guilford, T.; Roberts, S.; Biro, D.; Rezek, I. Positional entropy during pigeon homing II: Navigational interpretation of Bayesian latent state models. J. Theor. Biol. 2004, 227, 25–38. [Google Scholar] [CrossRef] [PubMed]
- Herbert-Read, J.E.; Ward, A.J.; Sumpter, D.J.; Mann, R.P. Escape path complexity and its context dependency in Pacific blue-eyes (Pseudomugil signifer). J. Exp. Biol. 2017, 220, 2076–2081. [Google Scholar] [CrossRef] [PubMed]
- Edmunds, M. Defence in Animals: A Survey of Anti-Predator Defences; Longman Publishing Group: Harlow, UK, 1974. [Google Scholar]
- Chance, M.R.A.; Russell, W.M.S. Protean displays: A form of all aesthetic behavior. J. Zool. 1959, 132, 65–70. [Google Scholar]
- Humphries, D.A.; Driver, P.M. Protean defense by prey animals. Oecologia 1970, 5, 285–302. [Google Scholar] [CrossRef] [PubMed]
- Shahaf, E.; Eilam, D. Protean behavior under barn-owl attack: Voles alternate between freezing and fleeing and spiny mice flee in alternating patterns. Behav. Brain Res. 2004, 155, 207–216. [Google Scholar]
- Domenici, P.; Booth, D.; Blagburn, J.M.; Bacon, J.P. Cockroaches keep predators guessing by using preferred escape trajectories. Curr. Biol. 2008, 18, 1792–1796. [Google Scholar] [CrossRef] [PubMed]
- Driver, P.M.; Hamphries, D.A. Protean Behavior: The Biology of Unpredictability; Clarendon Press: Oxford, UK, 1988. [Google Scholar]
- Nahin, P.J. Chases and Escapes: The Mathematics of Pursuit and Evasion; Princeton University Press: Princeton, NJ, USA, 2012. [Google Scholar]
- Li, W. A dynamics perspective of pursuit-evasion: Capturing and escaping when the pursuer runs faster than the agile evader. IEEE Trans. Autom. Control 2017, 62, 451–457. [Google Scholar] [CrossRef]
- Basilico, N.; Gatti, N.; Amigoni, F. Patrolling security games: Definition and algorithms for solving large instances with single patroller and single intruder. Artif. Intell. 2012, 184, 78–123. [Google Scholar] [CrossRef] [Green Version]
- Hernández, E.; Barrientos, A.; Del Cerro, J. Selective Smooth Fictitious Play: An approach based on game theory for patrolling infrastructures with a multi-robot system. Expert Syst. Appl. 2014, 41, 2897–2913. [Google Scholar] [CrossRef]
- Agmon, N.; Kaminka, G.A.; Kraus, S. Multi-robot adversarial patrolling: Facing a full-knowledge opponent. J. Artif. Intell. Res. 2011, 42, 887–916. [Google Scholar]
- Song, J.; Gupta, S.; Hare, J. Game-theoretic cooperative coverage using autonomous vehicles. In Proceedings of the IEEE Oceans 2014, St. John’s, NL, Canada, 14–19 September 2014. [Google Scholar]
- Portugal, D.; Rocha, R.P. Multi-robot patrolling algorithms: Examining performance and scalability. Adv. Robot. 2013, 27, 325–336. [Google Scholar] [CrossRef]
- Tews, A.D.; Sukhatme, G.S.; Mataric, M.J. A multi-robot approach to stealthy navigation in the presence of an observer. In Proceedings of the 2004 IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 26 April–1 May 2004. [Google Scholar]
- Araiza-Illan, D.; Dodd, T.J. Bio-inspired autonomous navigation and escape from pursuers with potential functions. In Advances in Autonomous Robotics, Proceedings of the TAROS 2012, Bristol, UK, 20–25 August 2012; Herrmann, G., Ed.; Springer: Berlin, Germany, 2012. [Google Scholar]
- Chung, T.H.; Hollinger, G.A.; Isler, V. Search and pursuit-evasion in mobile robotics. Auton. Robot. 2011, 31, 299. [Google Scholar] [CrossRef]
- Agmon, N. Robotic strategic behavior in adversarial environments. In Proceedings of the 26th International Joint Conference on Artificial Intelligence, Melbourne, Australia, 19–25 August 2017. [Google Scholar]
- Strogatz, S.H. Nonlinear Dynamics and Chaos: With Applications to Physics, Biology, Chemistry, and Engineering; Avalon Publishing: New York, NY, USA, 2014. [Google Scholar]
- Zang, X.; Iqbal, S.; Zhu, Y.; Liu, X.; Zhao, J. Applications of chaotic dynamics in robotics. Int. J. Adv. Robot. Syst. 2016, 13, 60. [Google Scholar] [CrossRef]
- Martins-Filho, L.S.; Macau, E.E.N. Patrol mobile robots and chaotic trajectories. Math. Probl. Eng. 2007, 2007. [Google Scholar] [CrossRef]
- Curiac, D.I.; Volosencu, C. Chaotic trajectory design for monitoring an arbitrary number of specified locations using points of interest. Math. Probl. Eng. 2012, 2012. [Google Scholar] [CrossRef]
- Curiac, D.I.; Volosencu, C. Developing 2D Chaotic Trajectories for Monitoring an Area with Two Points of Interest. In Proceedings of the 10th WSEAS International Conference on Automation & Information—ICAI 2009, Prague, Czech Republic, 23–25 March 2009. [Google Scholar]
- Curiac, D.I.; Volosencu, C. A 2D chaotic path planning for mobile robots accomplishing boundary surveillance missions in adversarial conditions. Commun. Nonlinear Sci. 2014, 19, 3617–3627. [Google Scholar] [CrossRef]
- Volos, C.K.; Kyprianidis, I.M.; Stouboulos, I.N. Experimental investigation on coverage performance of a chaotic autonomous mobile robot. Robot. Auton. Syst. 2013, 61, 1314–1322. [Google Scholar] [CrossRef]
- Volos, C.K.; Kyprianidis, I.M.; Stouboulos, I.N. A chaotic path planning generator for autonomous mobile robots. Robot. Auton. Syst. 2012, 60, 651–656. [Google Scholar] [CrossRef]
- Li, C.; Wang, F.; Zhao, L.; Li, Y.; Song, Y. An improved chaotic motion path planner for autonomous mobile robots based on a logistic map. Int. J. Adv. Robot. Syst. 2013, 10, 273. [Google Scholar] [CrossRef]
- Li, C.; Song, Y.; Wang, F.; Wang, Z.; Li, Y. A bounded strategy of the mobile robot coverage path planning based on Lorenz chaotic system. Int. J. Adv. Robot. Syst. 2016, 13, 107. [Google Scholar] [CrossRef]
- Nakamura, Y.; Sekiguchi, A. The chaotic mobile robot. IEEE Trans. Robot. Autom. 2001, 17, 898–904. [Google Scholar] [CrossRef]
- Curiac, D.I.; Volosencu, C. Imparting protean behavior to mobile robots accomplishing patrolling tasks in the presence of adversaries. Bioinspir. Biomim. 2015, 10, 056017. [Google Scholar] [CrossRef] [PubMed]
- Ng, J.; Bräunl, T. Performance comparison of bug navigation algorithms. J. Intell. Robot. Syst. 2007, 50, 73–84. [Google Scholar] [CrossRef]
- LaValle, S.M. Planning Algorithms; Cambridge University Press: Cambridge, UK, 2006. [Google Scholar]
- Özkaynak, F. A novel method to improve the performance of chaos based evolutionary algorithms. Optik 2015, 126, 5434–5438. [Google Scholar] [CrossRef]
- Arnold, V.I.; Avez, A. Ergodic Problems of Classical Mechanics; Benjamin: New York, NY, USA, 1968. [Google Scholar]
- Curiac, D.I.; Volosencu, C. Path planning algorithm based on Arnold cat map for surveillance UAVs. Def. Sci. J. 2015, 65, 483–488. [Google Scholar] [CrossRef]
- Chen, Y.L.; Yau, H.T.; Yang, G.J. A Maximum Entropy-Based Chaotic Time-Variant Fragile Watermarking Scheme for Image Tampering Detection. Entropy 2013, 15, 3170–3185. [Google Scholar] [CrossRef]
- Chen, G.; Mao, Y.; Chui, C.K. A symmetric image encryption scheme based on 3D chaotic cat maps. Chaos Solitons Fractals 2004, 21, 749–761. [Google Scholar] [CrossRef]
- Curiac, D.I.; Volosencu, C. A generic method to construct new customized-shaped chaotic systems using the relative motion concept. Nonlinear Anal. Model. Control 2016, 21, 413–423. [Google Scholar]
- Kamon, I.; Rivlin, E. Sensory-based motion planning with global proofs. IEEE Trans. Robot. Autom. 1997, 13, 814–822. [Google Scholar] [CrossRef]
- Kamon, I.; Rivlin, E.; Rimon, E. Range-sensor based navigation in three dimensions. In Proceedings of the 1999 IEEE International Conference on Robotics & Automation, Detroit, MI, USA, 10–15 May 1999. [Google Scholar]
- Rashid, A.T.; Ali, A.A.; Frasca, M.; Fortuna, L. Path planning with obstacle avoidance based on visibility binary tree algorithm. Robot. Auton. Syst. 2013, 61, 1440–1449. [Google Scholar] [CrossRef]
- Arena, P.; De Fiore, S.; Fortuna, L.; Patané, L. Perception-action map learning in controlled multiscroll systems applied to robot navigation. Chaos 2008, 18, 043119. [Google Scholar] [CrossRef] [PubMed]
- Kamon, I.; Rimon, E.; Rivlin, E. Tangentbug: A range-sensor-based navigation algorithm. Int. J. Robot. Res. 1998, 17, 934–953. [Google Scholar] [CrossRef]
- Choset, H.M.; Lynch, K.M.; Hutchinson, S.; Kantor, G.A.; Burgard, W.; Kavraki, L.E.; Thrun, S. Principles of Robot Motion: Theory, Algorithms, and Implementation; MIT Press: Cambridge, MA, USA, 2005; ISBN 9780262033275. [Google Scholar]













© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Curiac, D.-I.; Banias, O.; Volosencu, C.; Curiac, C.-D. Novel Bioinspired Approach Based on Chaotic Dynamics for Robot Patrolling Missions with Adversaries. Entropy 2018, 20, 378. https://doi.org/10.3390/e20050378
Curiac D-I, Banias O, Volosencu C, Curiac C-D. Novel Bioinspired Approach Based on Chaotic Dynamics for Robot Patrolling Missions with Adversaries. Entropy. 2018; 20(5):378. https://doi.org/10.3390/e20050378
Chicago/Turabian StyleCuriac, Daniel-Ioan, Ovidiu Banias, Constantin Volosencu, and Christian-Daniel Curiac. 2018. "Novel Bioinspired Approach Based on Chaotic Dynamics for Robot Patrolling Missions with Adversaries" Entropy 20, no. 5: 378. https://doi.org/10.3390/e20050378
APA StyleCuriac, D. -I., Banias, O., Volosencu, C., & Curiac, C. -D. (2018). Novel Bioinspired Approach Based on Chaotic Dynamics for Robot Patrolling Missions with Adversaries. Entropy, 20(5), 378. https://doi.org/10.3390/e20050378