From Lagrangian Mechanics to Nonequilibrium Thermodynamics: A Variational Perspective


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Some History of the Variational Approaches to Thermodynamics
1.2. Main Features of Our Variational Formulation
1.3. Organization of the Paper
2. Variational Principles in Lagrangian Mechanics
2.1. Classical Mechanics
Systems with Nonholonomic Constraints
2.2. Continuum Mechanics
2.2.1. Configuration Manifolds
2.2.2. Hamilton’s Principle
2.2.3. The Lagrangian of the Compressible Fluid
2.3. Lagrangian Reduction by Symmetry
3. Variational Formulation for Discrete Thermodynamic Systems
- The two laws of thermodynamics
- First law:
- A system is said to be closed if there is no exchange of matter, i.e., . When , the system is said to be open.
- A system is said to be adiabatically closed if it is closed and there are no heat exchanges, i.e., .
- A system is said to be isolated if it is adiabatically closed and there is no mechanical power exchange, i.e., .
- Second law:
- (a)
- Evolution part:If the system is adiabatically closed, the entropy S is a non-decreasing function with respect to time, i.e.,where is the entropy production rate of the system accounting for the irreversibility of internal processes.
- (b)
- Equilibrium part:If the system is isolated, as time tends to infinity, the entropy tends toward a finite local maximum of the function S over all thermodynamic states compatible with the system, i.e.,
3.1. Adiabatically Closed Simple Thermodynamic Systems
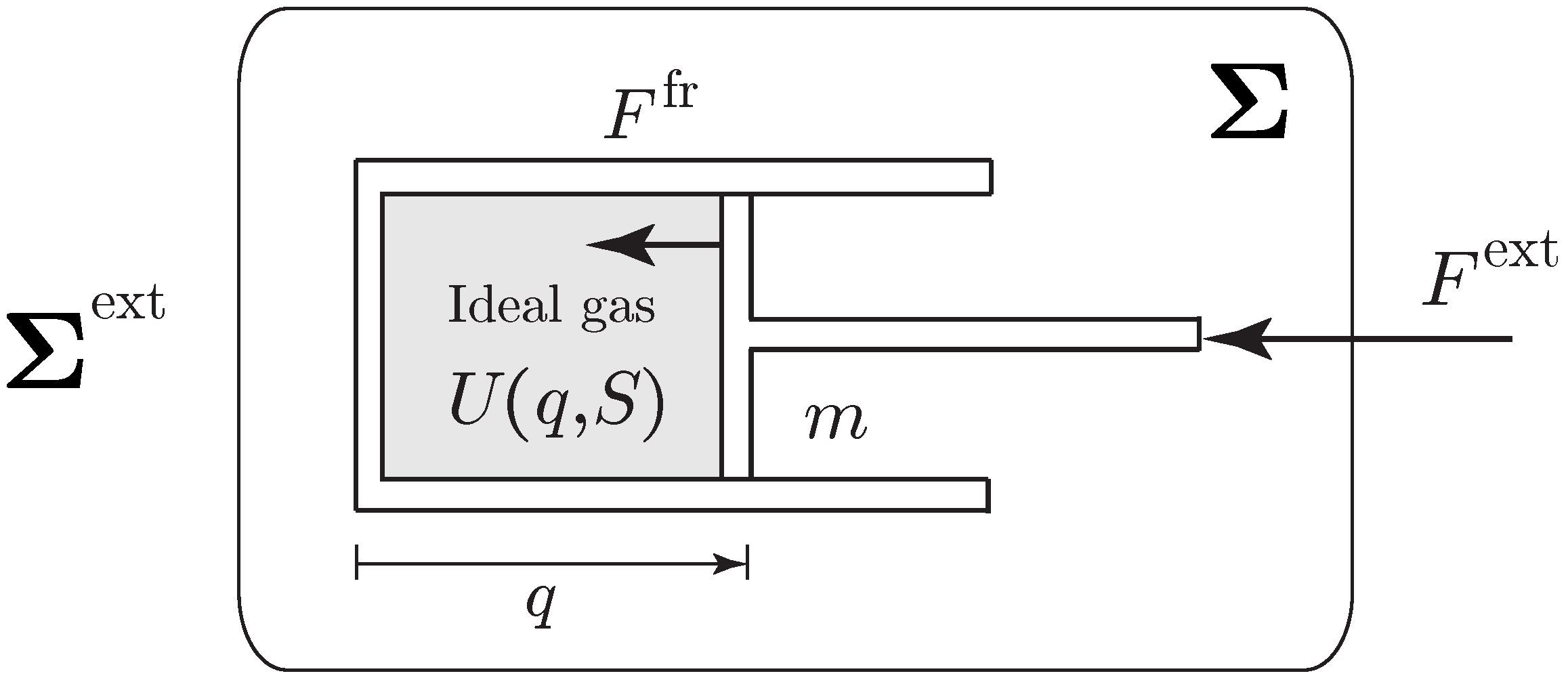
3.1.1. Variational Formulation for Mechanical Systems with Friction
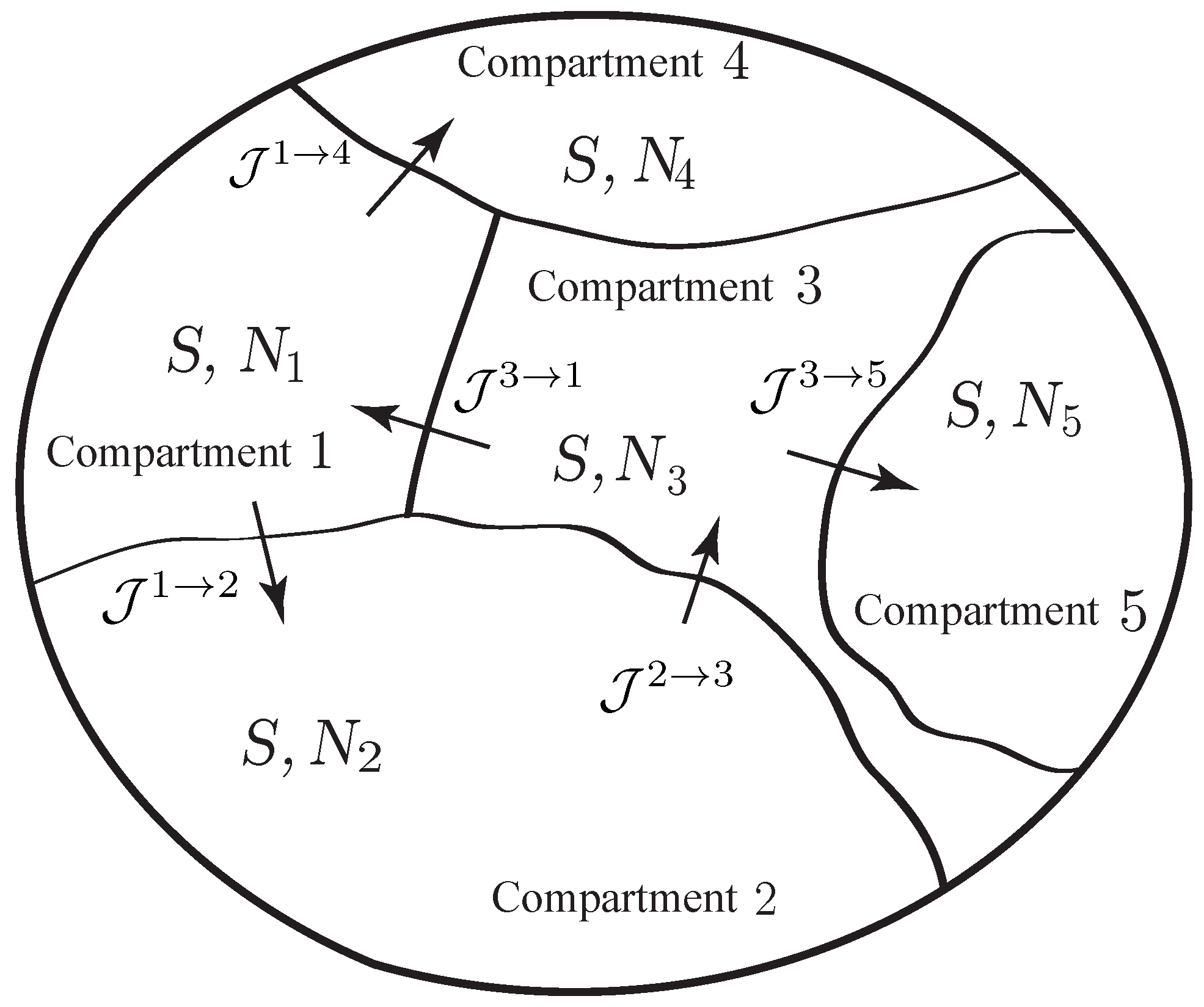
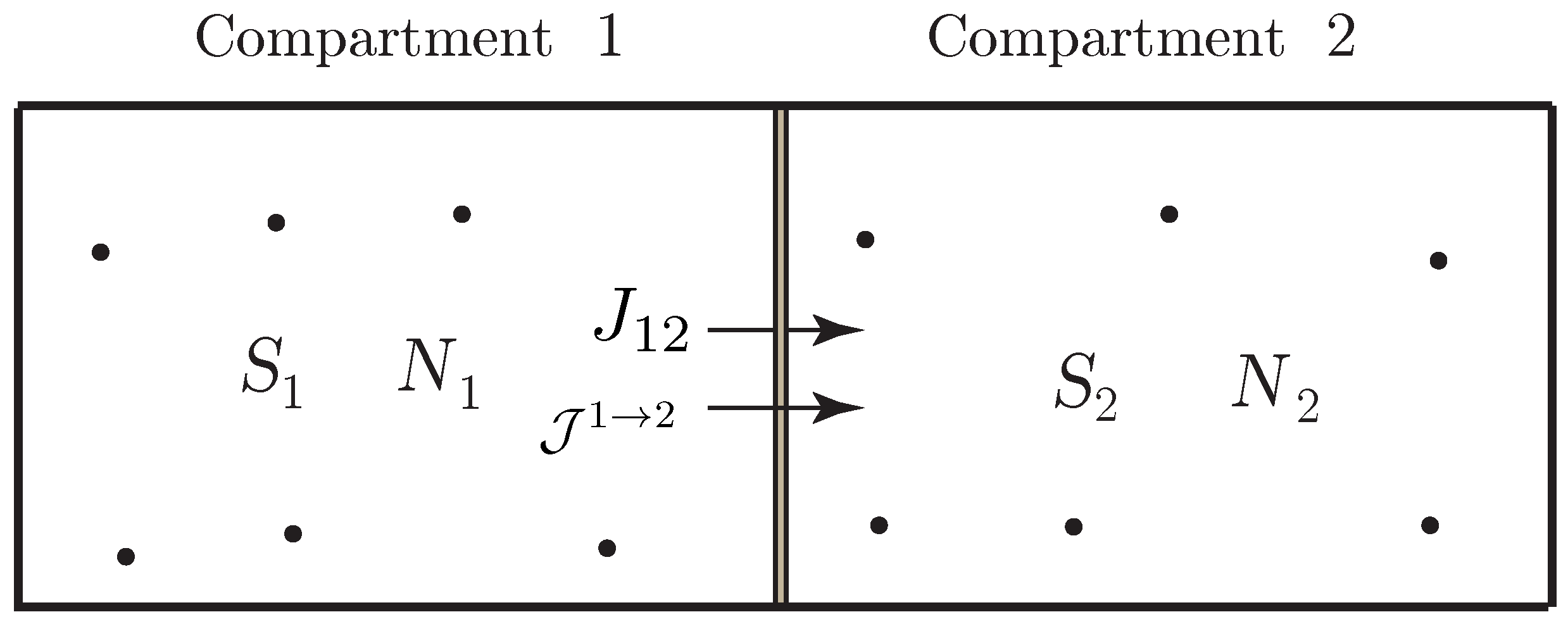
3.1.2. Variational Formulation for Systems with Internal Mass Transfer
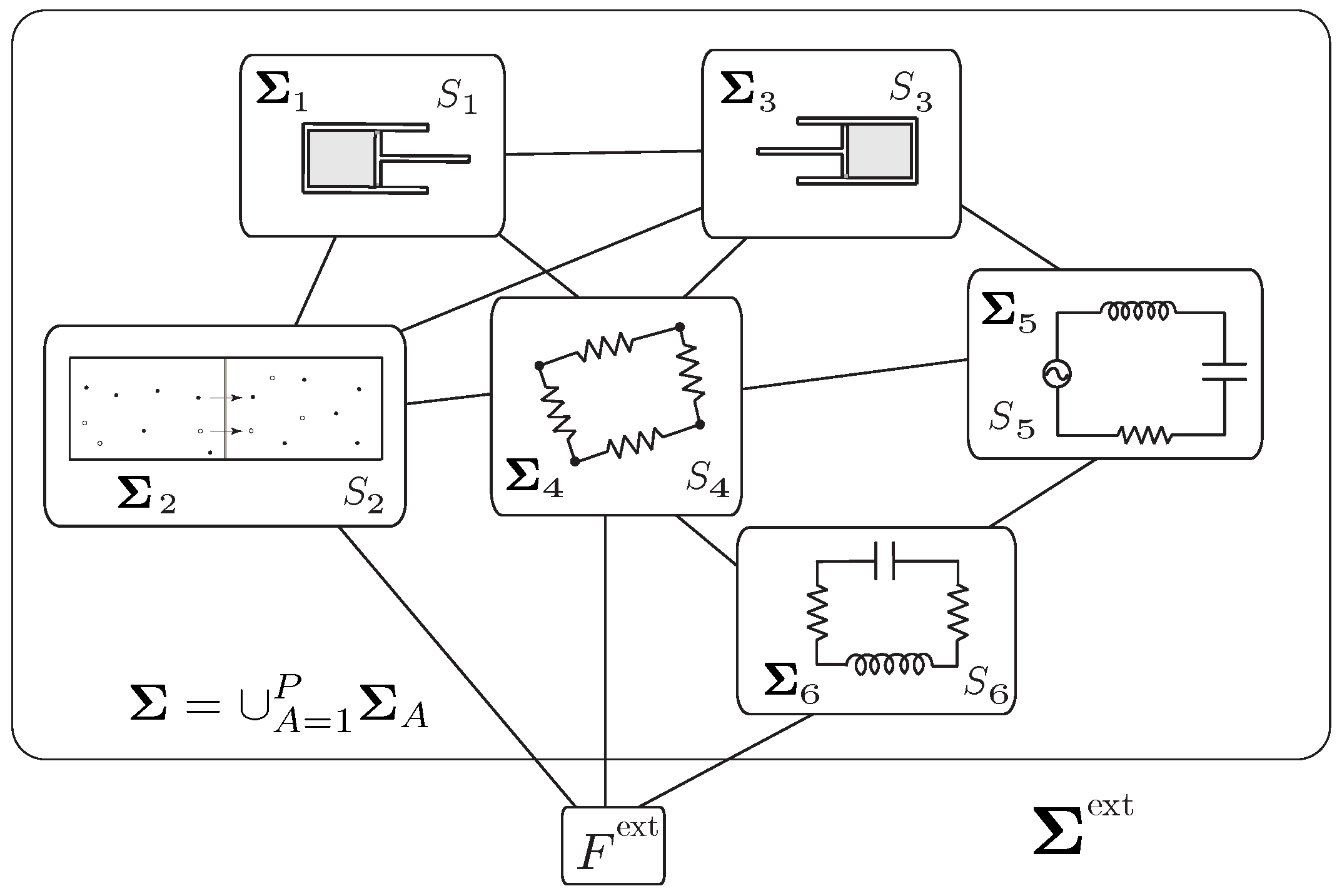
3.2. Adiabatically Closed Non-Simple Thermodynamic Systems
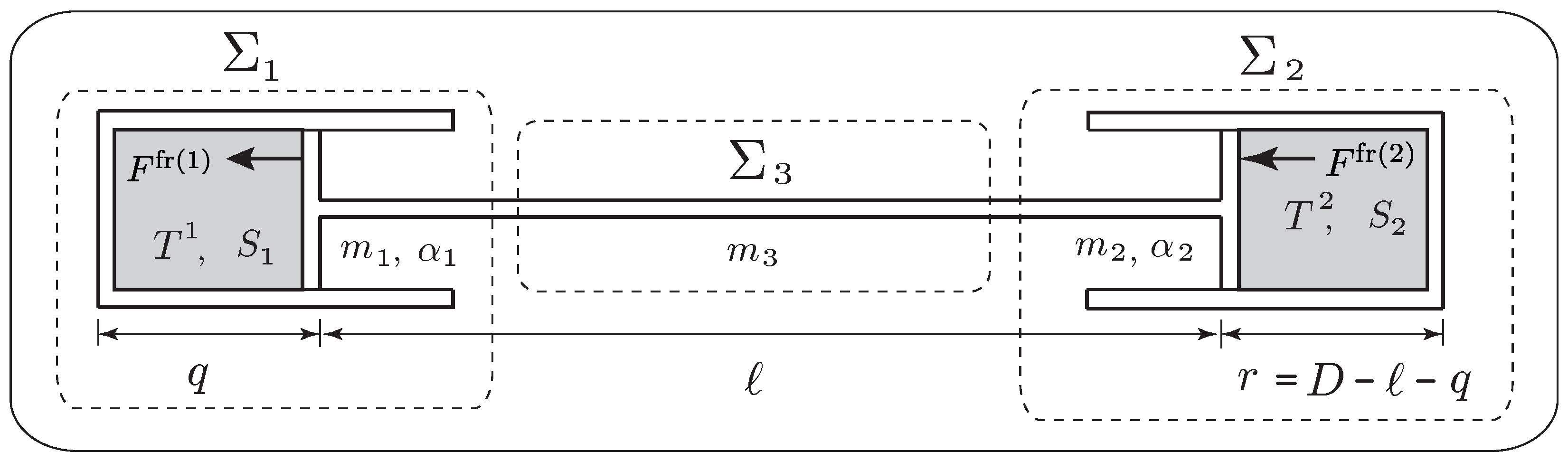
3.2.1. Variational Formulation for Systems with Friction and Heat Conduction
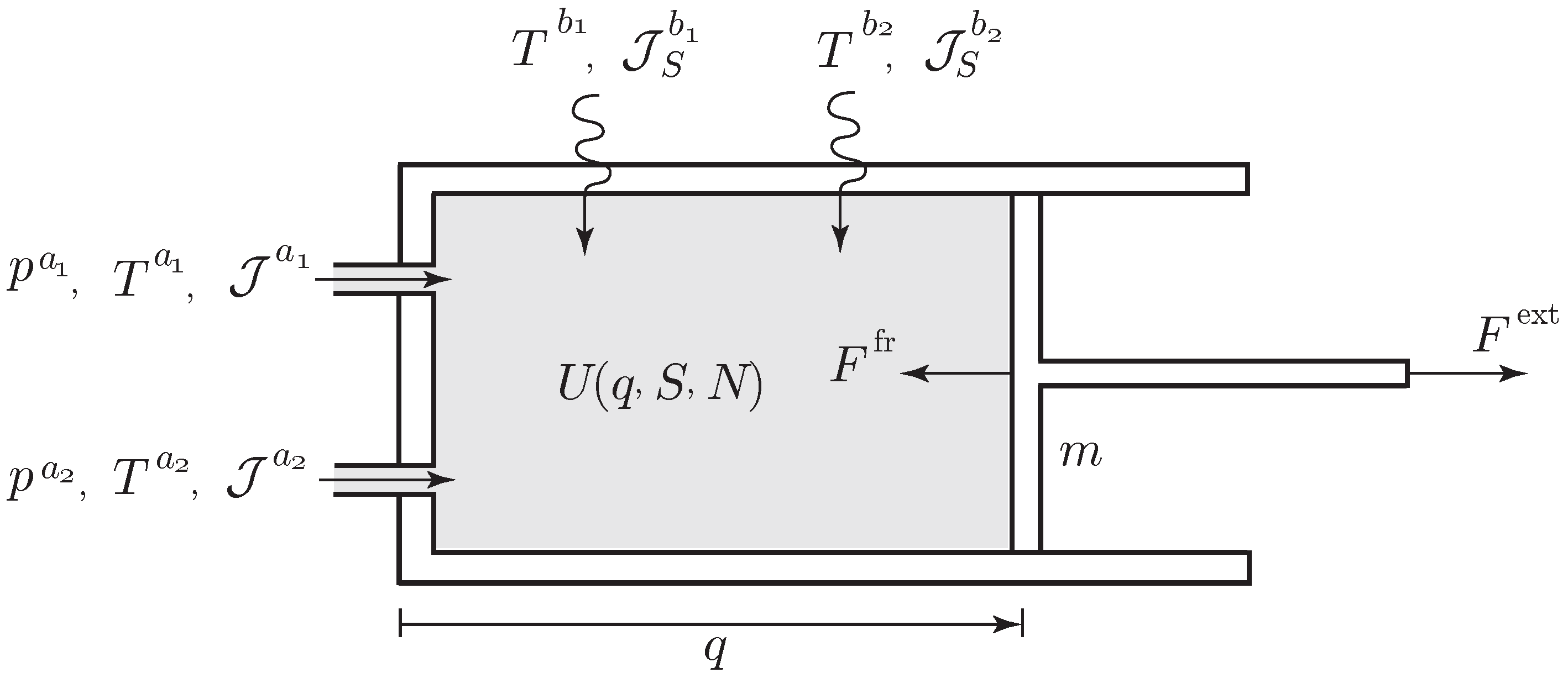
3.2.2. Variational Formulation for Systems with Friction, Heat Conduction, and Internal Mass Transfer
3.3. Open Thermodynamic Systems
4. Variational Formulation for Continuum Thermodynamic Systems
4.1. Variational Formulation in the Lagrangian Description
4.2. Variational Formulation in the Eulerian Description
5. Concluding Remarks
Further Developments
- Dirac structures and Dirac systems: It is well known that when the Lagrangian is regular, the equations of classical mechanics can be transformed into the setting of Hamiltonian systems. The underlying geometric object for this formulation is the canonical symplectic form on the phase space of the configuration manifold. When irreversible processes are included, this geometric formulation is lost because of the degeneracy of the Lagrangians and the presence of the nonlinear nonholonomic constraints. Hence, one may ask: what is the appropriate geometric object that generalizes the canonical symplectic form in the formulation of thermodynamics? In [64,71], it was shown that the evolution equations for both adiabatically closed and open systems can be geometrically formulated in terms of various classes of Dirac structures induced by the phenomenological constraint and from the canonical symplectic form on or on .
- Reduction by symmetry: When symmetries are available, reduction processes can be applied to the variational formulation of thermodynamics, thereby extending the process of Lagrangian reduction from classical mechanics to thermodynamics. This is illustrated in Section 4.2 for the Navier–Stokes–Fourier equation, but it can be carried out in general for all the variational formulations presented in this paper. For instance, we refer to [72] for the case of simple thermodynamic systems on Lie groups with symmetries.
- Variational discretization: Associated with the variational formulation in this paper, there exist variational integrators for the nonequilibrium thermodynamics of simple adiabatically closed systems (see [72,73]). These integrators are structure-preserving numerical schemes that are obtained by a discretization of the variational formulation. The structure-preserving property of the flow of such systems is an extension of the symplectic property of the flow of variational integrators for Lagrangian mechanics.
- Modeling of thermodynamically consistent models: The variational formulation for thermodynamics can be also used to derive new models, which are automatically thermodynamically consistent. We refer to [74] for an application of the variational formulation to atmospheric thermodynamics and its pseudo-incompressible approximation.
Funding
Conflicts of Interest
References
- Gay-Balmaz, F.; Yoshimura, H. A Lagrangian variational formulation for nonequilibrium thermodynamics. Part I: Discrete systems. J. Geom. Phys. 2017, 111, 169–193. [Google Scholar] [CrossRef]
- Gay-Balmaz, F.; Yoshimura, H. A Lagrangian variational formulation for nonequilibrium thermodynamics. Part II: Continuum systems. J. Geom. Phys. 2017, 111, 194–212. [Google Scholar] [CrossRef]
- Gay-Balmaz, F.; Yoshimura, H. A variational formulation of nonequilibrium thermodynamics for discrete open systems with mass and heat transfer. Entropy 2018, 20, 163. [Google Scholar] [CrossRef]
- Gay-Balmaz, F.; Yoshimura, H. A free energy Lagrangian variational formulation of the Navier-Stokes-Fourier system. Int. J. Geom. Methods Mod. Phys. 2018, in press. [Google Scholar] [CrossRef]
- Gibbs, J.W. Collected Works; Scribner: New York, NY, USA, 1902. [Google Scholar]
- Callen, H.B. Thermodynamics and an Introduction to Thermostatistics, 2nd ed.; John Wiley & Sons Inc.: New York, NY, USA, 1985. [Google Scholar]
- Landau, L.D.; Lifshitz, E.M. Statistical Physics; Volume 5 of A Course of Theoretical Physics; Pergamon Press: Oxford, UK, 1969. [Google Scholar]
- Onsager, L. Reciprocal relations in irreversible processes I. Phys. Rev. 1931, 37, 405–426. [Google Scholar] [CrossRef]
- Onsager, L.; Machlup, S. Fluctuations and irreversible processes. Phys. Rev. 1953, 91, 1505–1512. [Google Scholar] [CrossRef]
- Onsager, L.; Machlup, S. Fluctuations and irreversible processes II. Systems with kinetic energy. Phys. Rev. 1953, 91, 1512–1515. [Google Scholar] [CrossRef]
- Prigogine, I. Etude Thermodynamique des Phénomènes Irréversibles; Bruxelles: Brussels, Belgium, 1947. [Google Scholar]
- Glansdorff, P.; Prigogine, I. Thermodynamic Theory of Structure, Stability, and Fluctuations; Wiley-Interscience: New York, NY, USA, 1971. [Google Scholar]
- Ziegler, H. A possible generalization of Onsager’s theory. In Irreversible Aspects of Continuum Mechanics; Barkus, H., Sedov, L.I., Eds.; Springer: New York, NY, USA, 1968. [Google Scholar]
- Gyarmati, I. Nonequilibrium Thermodynamics: Field Theory and Variational Principles; Springer: New York, NY, USA, 1970. [Google Scholar]
- Lavenda, B.H. Thermodynamics of Irreversible Processes; Macmillan: London, UK, 1978. [Google Scholar]
- Ichiyanagi, M. Variational principles in irreversible processes. Phys. Rep. 1994, 243, 125–182. [Google Scholar] [CrossRef]
- Biot, M.A. A virtual dissipation principle and Lagrangian equations in non-linear irreversible thermodynamics. Acad. R. Belg. Bull. Cl. Sci. 1975, 5, 6–30. [Google Scholar]
- Biot, M.A. New variational-Lagrangian irreversible thermodynamics with application to viscous flow, reaction-diffusion, and solid mechanics. Adv. Appl. Mech. 1984, 24, 1–91. [Google Scholar]
- Fukagawa, H.; Fujitani, Y. A variational principle for dissipative fluid dynamics. Prog. Theor. Phys. 2012, 127, 921–935. [Google Scholar] [CrossRef]
- Gibbs, J.W. Graphical methods in the thermodynamics of fluids. Trans. Conn. Acad. 1873, 2, 309–342. [Google Scholar]
- Gibbs, J.W. A method of geometrical representation of the thermodynamic properties of substances by means of surfaces. Trans. Conn. Acad. 1873, 2, 382–404. [Google Scholar]
- Carathéodory, C. Untersuchungen über die Grundlagen der Thermodynamik. Math. Ann. 1909, 67, 355–386. [Google Scholar] [CrossRef]
- Hermann, R. Geometry, Physics and Systems; Dekker: New York, NY, USA, 1973. [Google Scholar]
- Mrugala, R. Geometrical formulation of equilibrium phenomenological thermodynamics. Rep. Math. Phys. 1978, 14, 419–427. [Google Scholar] [CrossRef]
- Mrugala, R. A new representation of Thermodynamic Phase Space. Bull. Pol. Acad. Sci. 1980, 28, 13–18. [Google Scholar]
- Mrugala, R.; Nulton, J.D.; Schon, J.C.; Salamon, P. Contact structure in thermodynamic theory. Rep. Math. Phys. 1991, 29, 109–121. [Google Scholar] [CrossRef]
- Eberard, D.; Maschke, B.M.; van der Schaft, A.J. An extension of Hamiltonian systems to the thermodynamic phase space: Towards a geometry of nonreversible processes. Rep. Math. Phys. 2007, 60, 175–198. [Google Scholar] [CrossRef] [Green Version]
- Grmela, M. Bracket formulation of dissipative fluid mechanics equations. Phys. Lett. A 1984, 102, 355–358. [Google Scholar] [CrossRef]
- Kaufman, A. Dissipative Hamiltonian systems: A unifying principle. Phys. Lett. A 1984, 100, 419–422. [Google Scholar] [CrossRef]
- Morrison, P. Bracket formulation for irreversible classical fields. Phys. Lett. A 1984, 100, 423–427. [Google Scholar] [CrossRef]
- Edwards, B.J.; Beris, A.N. Noncanonical Poisson bracket for nonlinear elasticity with extensions to viscoelasticity. Phys. A Math. Gen. 1991, 24, 2461–2480. [Google Scholar] [CrossRef]
- Edwards, B.J.; Beris, A.N. Unified view of transport phenomena based on the generalized bracket formulation. Ind. Eng. Chem. Res. 1991, 30, 873–881. [Google Scholar] [CrossRef]
- Grmela, M.; Öttinger, H.-C. Dynamics and thermodynamics of complex fluids. I. Development of a general formalism. Phys. Rev. E 1997, 56, 6620–6632. [Google Scholar] [CrossRef]
- Morrison, P. A paradigm for joined Hamiltonian and dissipative systems. Physica D 1986, 18, 410–419. [Google Scholar] [CrossRef]
- Öttinger, H.C.; Grmela, M. Dynamics and thermodynamics of complex fluids. II. Illustrations of a general formalism. Phys. Rev. E 1997, 56, 6633–6655. [Google Scholar] [CrossRef]
- Eldred, C.; Gay-Balmaz, F. Single and double generator bracket formulations of geophysical fluids with irreversible processes. arXiv, 2018; arXiv:1811.11609v1. [Google Scholar]
- Green, A.E.; Naghdi, P.M. A re-examination of the basic postulates of thermomechanics. Proc. R. Soc. Lond. Ser. A 1991, 432, 171–194. [Google Scholar] [CrossRef]
- Stueckelberg, E.C.G.; Scheurer, P.B. Thermocinétique Phénoménologique Galiléenne; Birkhäuser: Basel, Switzerland, 1974. [Google Scholar]
- Landau, L.D.; Lifshitz, E.M. Mechanics; Volume 1 of A Course of Theoretical Physics; Pergamon Press: Oxford, UK, 1969. [Google Scholar]
- Neimark, J.I.; Fufaev, N.I. Dynamics of Nonholonomic Systems; Volume 33 of Translations of Mathematical Monographs; American Mathematical Society: Providence, RI, USA, 1972. [Google Scholar]
- Arnold, V.I.; Kozlov, V.V.; Neishtadt, A.I. Dynamical Systems III; Encyclopedia of Mathematics; Springer: New York, NY, USA, 1988; Volume 3. [Google Scholar]
- Bloch, A.M. Nonholonomic Mechanics and Control; Volume 24 of Interdisciplinary Applied Mathematics; Baillieul, J., Crouch, P., Marsden, J., Krishnaprasad, P.S., Murray, R.M., Zenkov, D., Eds.; Springer: New York, NY, USA, 2003. [Google Scholar]
- Lewis, A.; Murray, R.M. Variational principles in constrained systems: Theory and experiments. Int. J. Nonlinear Mech. 1995, 30, 793–815. [Google Scholar] [CrossRef]
- Herivel, J.W. The derivation of the equations of motion of an ideal fluid by Hamilton’s principle. Proc. Camb. Philos. Soc. 1955, 51, 344–349. [Google Scholar] [CrossRef]
- Serrin, J. Mathematical principles of classical fluid mechanics. In Handbuch der Physik VIII-I; Springer: Berlin, Germany, 1959; pp. 125–263. [Google Scholar]
- Eckart, C. Variation principles of hydrodynamics. Phys. Fluids 1960, 3, 421–427. [Google Scholar] [CrossRef]
- Truesdell, C.; Toupin, R. The classical field theories. In Handbuch der Physik III-I; Springer: Berlin, Germany, 1960; pp. 226–790. [Google Scholar]
- Marsden, J.E.; Hughes, T.J.R. Mathematical Foundations of Elasticity; Prentice Hall: New York, NY, USA, 1983. [Google Scholar]
- Gay-Balmaz, F.; Marsden, J.E.; Ratiu, T.S. Reduced variational formulations in free boundary continuum mechanics. J. Nonlinear Sci. 2012, 22, 553–597. [Google Scholar] [CrossRef]
- Marsden, J.E.; Ratiu, T.S. Introduction to Mechanics and Symmetry, 2nd ed.; Texts in Applied Mathematics; Springer: New York, NY, USA, 1999; Volume 17. [Google Scholar]
- Marsden, J.E.; Scheurle, J. Lagrangian reduction and the double spherical pendulum. ZAMP 1993, 44, 17–43. [Google Scholar] [CrossRef] [Green Version]
- Marsden, J.E.; Scheurle, J. The reduced Euler–Lagrange equations. Fields Inst. Commun. 1993, 1, 139–164. [Google Scholar]
- Cendra, H.; Marsden, J.E.; Ratiu, T.S. Lagrangian Reduction by Stages; Memoirs of the AMS: Providence, RI, USA, 2001; Volume 152. [Google Scholar]
- Holm, D.D.; Marsden, J.E.; Ratiu, T.S. The Euler-Poincaré equations and semidirect products with applications to continuum theories. Adv. Math. 1998, 137, 1–8. [Google Scholar] [CrossRef]
- Gruber, C. Thermodynamics of systems with internal adiabatic constraints: Time evolution of the adiabatic piston. Eur. J. Phys. 1999, 20, 259–266. [Google Scholar] [CrossRef]
- Ferrari, C.; Gruber, C. Friction force: From mechanics to thermodynamics. Eur. J. Phys. 2010, 31, 1159–1175. [Google Scholar] [CrossRef]
- Gruber, C.; Brechet, S.D. Lagrange equation coupled to a thermal equation: Mechanics as a consequence of thermodynamics. Entropy 2011, 13, 367–378. [Google Scholar] [CrossRef]
- Kedem, O.; Katchalsky, A. Permeability of composite membranes. Part 1. Electric current, volume flow and flow of solute through membranes. Trans. Faraday Soc. 1963, 59, 1918–1930. [Google Scholar] [CrossRef]
- Kedem, O.; Katchalsky, A. Permeability of composite membranes. Part 2. Parallel elements. Trans. Faraday Soc. 1963, 59, 1931–1940. [Google Scholar] [CrossRef]
- Kedem, O.; Katchalsky, A. Permeability of composite membranes. Part 3. Series array of elements. Trans. Faraday Soc. 1963, 59, 1941–1953. [Google Scholar] [CrossRef]
- Oster, G.F.; Perelson, A.S.; Katchalsky, A. Network thermodynamics: Dynamic modelling of biophysical systems. Q. Rev. Biophys. 1973, 6, 1–134. [Google Scholar] [CrossRef] [PubMed]
- Jacobs, H.; Yoshimura, H. Tensor products of Dirac structures and interconnection in Lagrangian mechanics. J. Geom. Mech. 2014, 6, 67–98. [Google Scholar] [CrossRef] [Green Version]
- von Helmholtz, H. Studien zur Statik Monocyklischer Systeme; Sitzungsberichte der Königlich Preussischen Akademie der Wissenschaften zu Berlin: Berlin, Germany, 1884; pp. 159–177. [Google Scholar]
- Gay-Balmaz, F.; Yoshimura, H. Dirac structures in nonequilibrium thermodynamics. J. Math. Phys. 2018, 59, 012701. [Google Scholar] [CrossRef] [Green Version]
- Sandler, S.I. Chemical, Biochemical, and Engineering Thermodynamics; John Wiley & Sons: New York, NY, USA, 2006. [Google Scholar]
- Klein, S.; Nellis, G. Thermodynamics; Cambridge University Press: Cambridge, UK, 2011. [Google Scholar]
- de Groot, S.R.; Mazur, P. Nonequilibrium Thermodynamics; North-Holland: Amsterdam, The Netherlands, 1969. [Google Scholar]
- Kondepudi, D.; Prigogine, I. Modern Thermodynamics; John Wiley & Sons: New York, NY, USA, 1998. [Google Scholar]
- Landau, L.D.; Lifshitz, E.M. Fluid Mechanics; Volume 6 of A Course of Theoretical Physics; Pergamon Press: Oxford, UK, 1969. [Google Scholar]
- Woods, L.C. The Thermodynamics of Fluid Systems; Clarendon Press: Oxford, UK, 1975. [Google Scholar]
- Gay-Balmaz, F.; Yoshimura, H. Dirac structures in nonequilibrium thermodynamics for open systems. Preprint 2018, unpublished. [Google Scholar]
- Couéraud, B.; Gay-Balmaz, F. Variational discretization of simple thermodynamical systems on Lie groups. Disc. Cont. Dyn. Syst. Ser. S 2018, in press. [Google Scholar]
- Gay-Balmaz, F.; Yoshimura, H. Variational discretization for the nonequilibrium thermodynamics of simple systems. Nonlinearity 2018, 31, 1673. [Google Scholar] [CrossRef]
- Gay-Balmaz, F. A variational derivation of the nonequilibrium thermodynamics of a moist atmosphere with rain process and its pseudoincompressible approximation. arXiv, 2018; arXiv:1701.03921v2. [Google Scholar]







© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gay-Balmaz, F.; Yoshimura, H. From Lagrangian Mechanics to Nonequilibrium Thermodynamics: A Variational Perspective. Entropy 2019, 21, 8. https://doi.org/10.3390/e21010008
Gay-Balmaz F, Yoshimura H. From Lagrangian Mechanics to Nonequilibrium Thermodynamics: A Variational Perspective. Entropy. 2019; 21(1):8. https://doi.org/10.3390/e21010008
Chicago/Turabian StyleGay-Balmaz, François, and Hiroaki Yoshimura. 2019. "From Lagrangian Mechanics to Nonequilibrium Thermodynamics: A Variational Perspective" Entropy 21, no. 1: 8. https://doi.org/10.3390/e21010008
APA StyleGay-Balmaz, F., & Yoshimura, H. (2019). From Lagrangian Mechanics to Nonequilibrium Thermodynamics: A Variational Perspective. Entropy, 21(1), 8. https://doi.org/10.3390/e21010008