CDCS: Cluster-Based Distributed Compressed Sensing to Facilitate QoS Routing in Cognitive Video Sensor Networks


Abstract
:1. Introduction
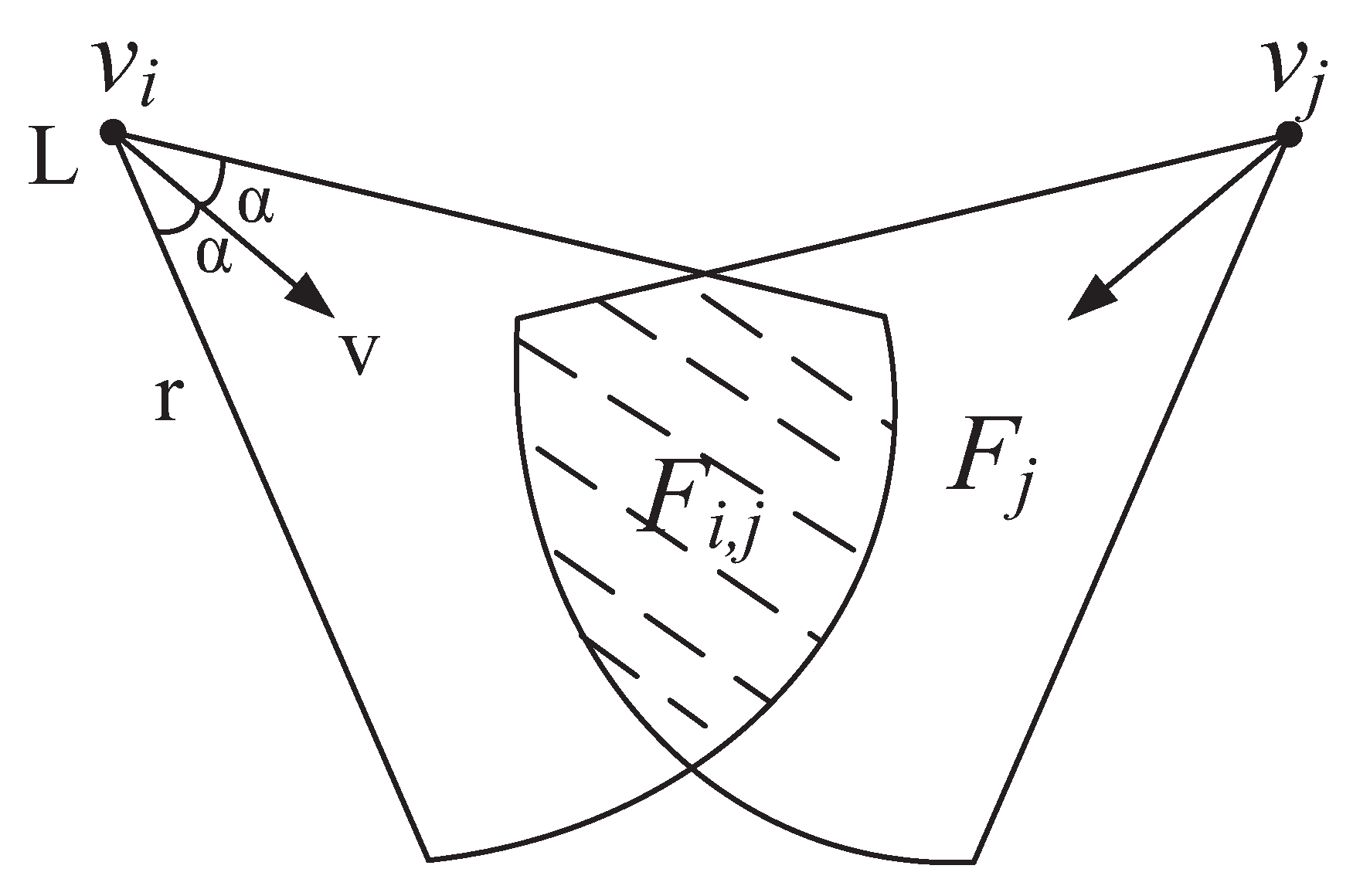
- A correlation metric for adjacent video sensors with overlapped FoVs is utilized to determine which video sensor can participate in a cluster. The purpose is to enhance video compression efficiency and reduce transmission cost to the sink.
- A sequential compressed sensing (SCS) approach is explored to decide whether enough measurements are obtained to limit video reconstruction error to a specified threshold. With the approach, we select collaborative nodes to carry out DCS in a cluster without any a priori assumptions regarding signal sparsity.
- A distributed spectrum-aware QoS routing framework is presented to transmit the compressed video data with consideration of the condition for video frame decoding. The goal to minimize energy consumption subject to delay and reliability constraints.
- The effectiveness and superiority of CDCS are validated through extensive simulations. The results show that CDCS could achieve energy efficient QoS communication while maintaining acceptable image quality.
2. Background and Related Works
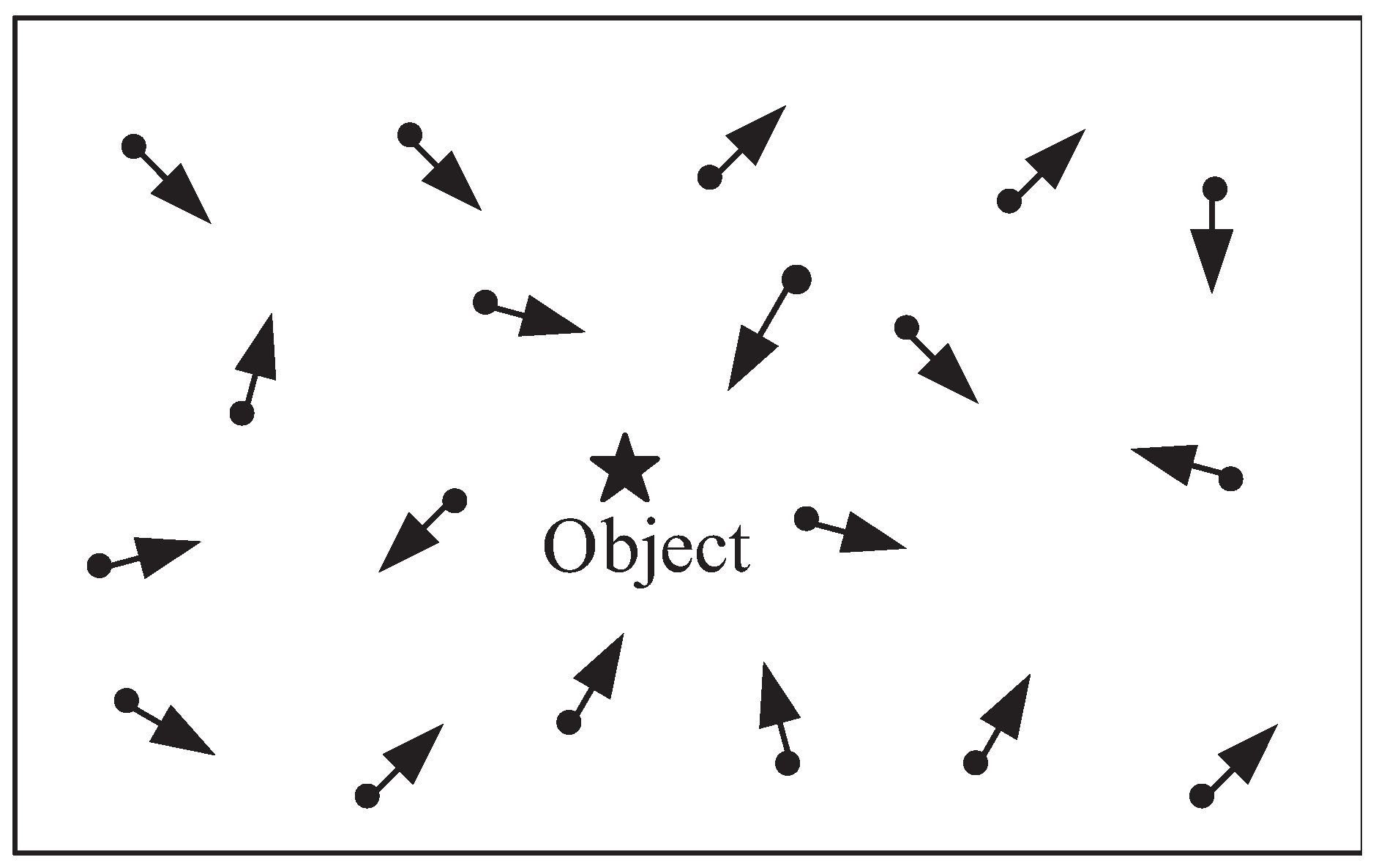
3. Motivation
3.1. Impact of Correlation on Compression Efficiency
3.2. Impact of Sparsity on Redundancy Removal
3.3. Impact of Cluster Head Selection on QoS Routing
4. Cluster-Based Distributed Compressed Sensing for QoS Routing
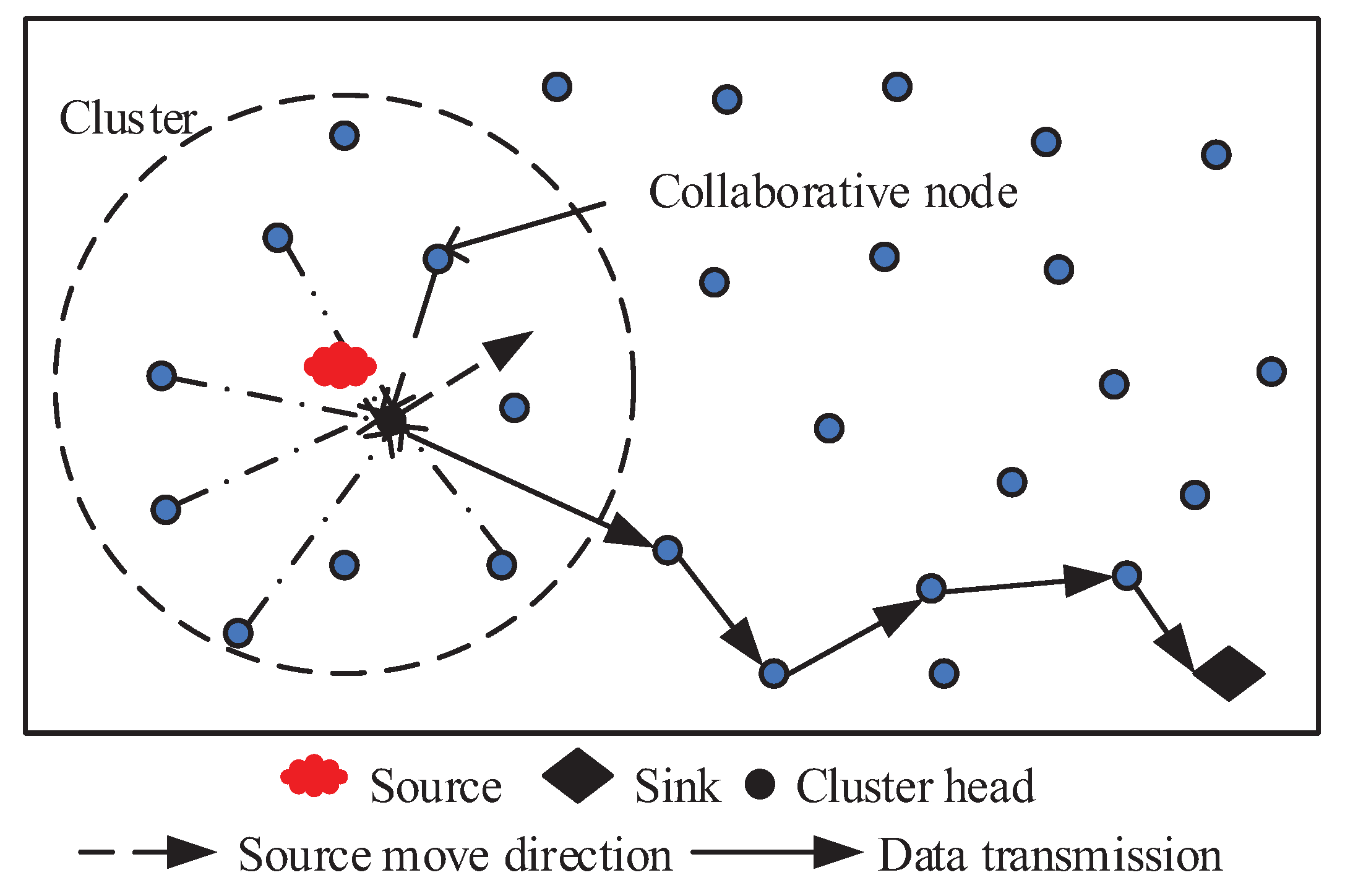
- Event-driven clustering: A video sensor is triggered, and the clustering process is generated when an event is detected within their vicinity. The cluster consisting of several member nodes is formed in the dashed circles.
- Collaborative node selection based on SCS: After a cluster is formed, the sink sends a message to the cluster head to inform the reconstruction error. On this basis, the cluster head uses the SCS approach to determine how many collaborative nodes are selected to participate in DCS to meet the requirement of reconstruction error rate.
- QoS-aware routing selection: Each node respectively selects the optimal next hop with the objective of minimizing energy consumption and satisfying QoS requirements in delay and reliability. Afterward, compressed data is transmitted to the sink along the chosen path.
4.1. Event-Driven Clustering
4.1.1. Problem Formulation
4.1.2. Clustering Algorithm
- In the first time slot, each member performs cluster head selection for the first time. If a member has maximum energy, it broadcasts a DECLARE message (see line 3) to its neighboring members and becomes a candidate cluster head. The candidate cluster head is silent until the end of the cluster head selection process. Otherwise, a member does not send any messages.
- In the second time slot, the execution process of each member except candidate cluster heads is as follows. Upon receiving a DECLARE message, a member broadcasts an ACK message to its neighbors to inform them that it has associated with one cluster head. Variable t is introduced to indicate whether it is the first time a DECLARE message is received (see line 8). If a member receives more than one DECLARE message, it sends an ACK message once and puts all the IDs of the members that have broadcast DECLARE messages into a set that stores cluster head information, denoted by . If a member only receives ACK messages but does not receive any DECLARE messages (there is no candidate cluster head in its neighborhood), it remains silent and removes the neighboring members that have sent ACK messages from set .
- In the third time slot, those silent members in the second time slot perform head selection again.
| Algorithm 1: Cluster Head Selection |
 |
| Algorithm 2: Cluster Formation |
 |
4.2. Collaborative Node Selection with SCS
4.3. Distributed QoS Routing
4.3.1. Energy Consumption
4.3.2. Local Reliability Guarantee
4.3.3. Local Delay Guarantee
4.3.4. Protocol Operation
| Algorithm 3: QoS-Guaranteed Next Hop Selection |
 |
5. Performance Evaluation
- Reconstruction error rate: the ratio of image reconstruction error to the original image.
- Peak-signal-to-noise ratio (PSNR) in the unit of decibel (dB) of reconstructed images, calculated by
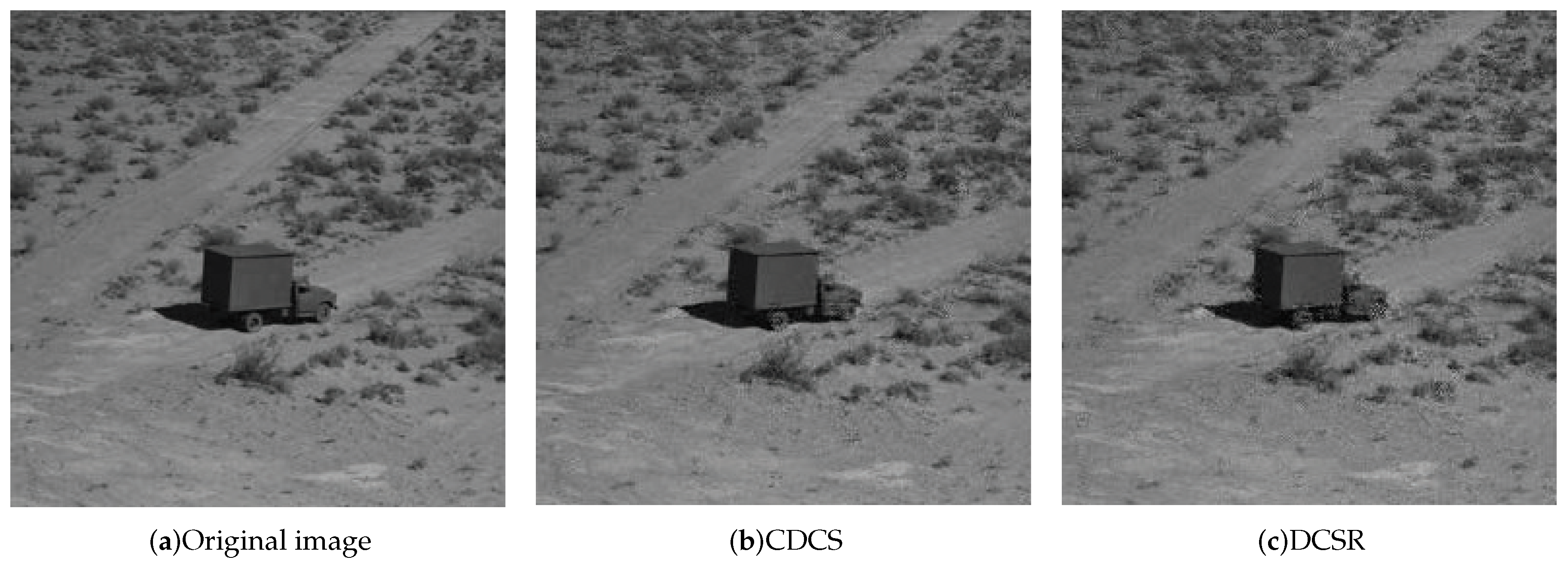
- Reconstructed images achieved by CDCS and DCSR.
- Reliability: the proportion of packets received at the sink out of the total number of packets that satisfy different QoS requirements.
- Energy consumption: the average energy utilization for a received frame at the sink.
- Delay: the average end-to-end delay for delivering packets to the sink.
5.1. Compression Efficiency
5.2. Energy Efficiency
5.3. QoS Provisioning
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Shen, H.; Bai, G. Routing in wireless multimedia sensor networks: A survey and challenges ahead. J. Netw. Comput. Appl. 2016, 71, 30–49. [Google Scholar] [CrossRef]
- Amjad, M.; Rehmani, M.H.; Mao, S. Wireless Multimedia Cognitive Radio Networks: A Comprehensive Survey. IEEE Commun. Surv. Tutor. 2018, 20, 1056–1103. [Google Scholar] [CrossRef]
- He, X.; Wang, K.; Huang, H.; Liu, B. Qoe-driven big data architecture for smart city. IEEE Commun. Mag. 2018, 56, 88–93. [Google Scholar] [CrossRef]
- Wang, K.; Mi, J.; Xu, C.; Zhu, Q.; Shu, L.; Deng, D.J. Real-time load reduction in multimedia big data for mobile Internet. ACM Trans. Multimed. Comput. Commun. Appl. 2016, 12, 76. [Google Scholar] [CrossRef]
- Ye, Q.; Zhuang, W.; Zhang, S.; Li, X.; Rao, J. End-to-end delay modeling for embedded VNF chains in 5G core networks. IEEE Internet Things J. 2019, 6, 692–704. [Google Scholar] [CrossRef]
- Ye, Q.; Zhuang, W. Distributed and adaptive medium access control for Internet-of-Things-enabled mobile networks. IEEE Internet Things J. 2017, 4, 446–460. [Google Scholar] [CrossRef]
- Jin, Y.; Qian, Z.; Sun, G. A real-time multimedia streaming transmission control mechanism based on edge cloud computing and opportunistic approximation optimization. Multimed. Tools Appl. 2018. [Google Scholar] [CrossRef]
- Masonta, M.T.; Mzyece, M.; Ntlatlapa, N. Spectrum decision in cognitive radio networks: A survey. IEEE Commun. Surv. Tutor. 2013, 15, 1088–1107. [Google Scholar] [CrossRef]
- Cacciapuoti, A.S.; Caleffi, M.; Paura, L. On the probabilistic deployment of smart grid networks in TV white space. Sensors 2016, 16, 671. [Google Scholar] [CrossRef]
- Bradai, A.; Singh, K.; Rachedi, A.; Ahmed, T. EMCOS: Energy-efficient Mechanism for Multimedia Streaming over Cognitive Radio Sensor Networks. Pervasive Mob. Comput. 2015, 22, 16–32. [Google Scholar] [CrossRef]
- Bicen, A.O.; Gungor, V.C.; Akan, O.B. Delay-sensitive and multimedia communication in cognitive radio sensor networks. Ad Hoc Netw. 2012, 10, 816–830. [Google Scholar] [CrossRef]
- Dai, R.; Akyildiz, I.F. A Spatial Correlation Model for Visual Information in Wireless Multimedia Sensor Networks. IEEE Trans. Multimed. 2009, 11, 1148–1159. [Google Scholar] [CrossRef] [Green Version]
- Ehsan, S.; Hamdaoui, B. A Survey on Energy-Efficient Routing Techniques with QoS Assurances for Wireless Multimedia Sensor Networks. IEEE Commun. Surveys Tutor. 2012, 14, 265–278. [Google Scholar] [CrossRef]
- Cacciapuoti, A.S.; Akyildiz, I.F.; Paura, L. Correlation-aware user selection for cooperative spectrum sensing in cognitive radio ad hoc networks. IEEE J. Sel. Area Commun. 2012, 30, 297–306. [Google Scholar] [CrossRef]
- Rani, M.; Dhok, S.; Deshmukh, R. A systematic review of compressive sensing: Concepts, implementations and applications. IEEE Access 2018, 6, 4875–4894. [Google Scholar] [CrossRef]
- Baron, D.; Wakin, M.B.; Duarte, M.F.; Sarvotham, S.; Baraniuk, R.G. Distributed Compressed Sensing. 2005. Available online: http://webee.technion.ac.il/people/drorb/pdf/DCS112005.pdf (accessed on 27 March 2019).
- Baron, D.; Duarte, M.F.; Sarvotham, S.; Wakin, M.B.; Baraniuk, R.G. An information-theoretic approach to distributed compressed sensing. In Proceedings of the 43rd Annual Allerton Conference on Communication, Control and Computing, Monticello, IL, USA, 28–30 September 2005. [Google Scholar]
- Duarte, M.F.; Sarvotham, S.; Baron, D.; Wakin, M.B.; Baraniuk, R.G. Distributed Compressed Sensing of Jointly Sparse Signals. In Proceedings of the Conference Record of the Thirty-Ninth Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 30 October–2 November 2005; pp. 1537–1541. [Google Scholar]
- Srisooksai, T.; Keamarungsi, K.; Lamsrichan, P.; Araki, K. Practical data compression in wireless sensor networks: A survey. J. Netw. Comput. Appl. 2012, 35, 37–59. [Google Scholar] [CrossRef]
- Dai, R.; Wang, P.; Akyildiz, I.F. Correlation-Aware QoS Routing With Differential Coding for Wireless Video Sensor Networks. IEEE Trans. Multimed. 2012, 14, 1469–1479. [Google Scholar] [CrossRef] [Green Version]
- Xie, R.; Jia, X. Transmission-Efficient Clustering Method for Wireless Sensor Networks Using Compressive Sensing. IEEE Trans. Parallel Distrib. Syst. 2014, 25, 806–815. [Google Scholar]
- Wu, X.; Xiong, Y.; Huang, W.; Shen, H.; Li, M. An efficient compressive data gathering routing scheme for large-scale wireless sensor networks. Comput. Electr. Eng. 2013, 39, 1935–1946. [Google Scholar] [CrossRef]
- Lan, K.C.; Wei, M.Z. A compressibility-based clustering algorithm for hierarchical compressive data gathering. IEEE Sens. J. 2017, 17, 2550–2562. [Google Scholar] [CrossRef]
- Shen, H.; Bai, G. QoS-Guaranteed Wireless Broadcast Scheduling with Network Coding and Rate Adaptation. IEEE Trans. Veh. Technol. 2018, 67, 6492–6503. [Google Scholar] [CrossRef]
- Shen, H.; Bai, G.; Tang, Z.; Zhao, L. QMOR: QoS-Aware Multi-sink Opportunistic Routing for Wireless Multimedia Sensor Networks. Wirel. Pers. Commun. 2014, 75, 1307–1330. [Google Scholar] [CrossRef]
- Usman, M.; Yang, N.; Jan, M.A.; He, X.; Xu, M.; Lam, K.M. A Joint Framework for QoS and QoE for Video Transmission over Wireless Multimedia Sensor Networks. IEEE Trans. Mob. Comput. 2018, 17, 746–759. [Google Scholar] [CrossRef]
- Ahmed, A.; Kumar, P.; Bhangwar, A.R.; Channa, M.I. A secure and QoS aware routing protocol for wireless sensor network. In Proceedings of the 11th International Conference for Internet Technology and Secured Transactions (ICITST), Barcelona, Spain, 5–7 December 2016; pp. 313–317. [Google Scholar]
- Felemban, E.; Lee, C.G.; Ekici, E. MMSPEED: multipath Multi-SPEED protocol for QoS guarantee of reliability and. Timeliness in wireless sensor networks. IEEE Trans. Mob. Comput. 2006, 5, 738–754. [Google Scholar] [CrossRef] [Green Version]
- Shah, G.A.; Alagoz, F.; Fadel, E.A.; Akan, O.B. A Spectrum-Aware Clustering for Efficient Multimedia Routing in Cognitive Radio Sensor Networks. IEEE Trans. Veh. Technol. 2014, 63, 3369–3380. [Google Scholar] [CrossRef]
- Heo, J.; Hong, J.; Cho, Y. EARQ: Energy Aware Routing for Real-Time and Reliable Communication in Wireless Industrial Sensor Networks. IEEE Trans. Ind. Inform. 2009, 5, 3–11. [Google Scholar] [CrossRef]
- Spachos, P.; Toumpakaris, D.; Hatzinakos, D. QoS and energy-aware dynamic routing in wireless multimedia sensor networks. In Proceedings of the IEEE International Conference on Communications (ICC), London, UK, 8–12 June 2015; pp. 6935–6940. [Google Scholar]
- Malioutov, D.M.; Sanghavi, S.R.; Willsky, A.S. Sequential Compressed Sensing. IEEE J. Sel. Top. Signal Process. 2010, 4, 435–444. [Google Scholar] [CrossRef] [Green Version]
- Ren, J.; Zhang, Y.; Zhang, N.; Zhang, D.; Shen, X. Dynamic channel access to improve energy efficiency in cognitive radio sensor networks. IEEE Trans. Wirel. Commun. 2016, 15, 3143–3156. [Google Scholar] [CrossRef]
- Zhu, H.; Fang, C.; Liu, Y.; Chen, C.; Li, M.; Shen, X.S. You can jam but you cannot hide: Defending against jamming attacks for geo-location database driven spectrum sharing. IEEE J. Sel. Area Commun. 2016, 34, 2723–2737. [Google Scholar] [CrossRef]
- Gong, D.; Yang, Y.; Pan, Z. Energy-efficient clustering in lossy wireless sensor networks. J. Parallel Distrib. Comput. 2013, 73, 1323–1336. [Google Scholar] [CrossRef]
- Heinzelman, W.B. An application-specmc protocol architecture for wireless microsensor networks. IEEE Trans. Wirel. Commun. 2002, 1, 660–670. [Google Scholar] [CrossRef]
- Wang, A.; Chandrakasan, A. Energy-efficient DSPs for wireless sensor networks. IEEE Singal Proc. Mag. 2002, 19, 68–78. [Google Scholar] [CrossRef] [Green Version]
- Pudlewski, S.; Prasanna, A.; Melodia, T. Compressed-sensing-enabled video streaming for wireless multimedia sensor networks. IEEE Trans. Mob. Comput. 2012, 11, 1060–1072. [Google Scholar] [CrossRef]
- Toni, L.; Maugey, T.; Frossard, P. Correlation-Aware Packet Scheduling in Multi-Camera Networks. IEEE Trans. Multimed. 2014, 16, 496–509. [Google Scholar] [CrossRef] [Green Version]
- Ziviani, A.; Wolfinger, B.E.; De Rezende, J.F.; Duarte, O.C.M.; Fdida, S. Joint adoption of QoS schemes for MPEG streams. Multimed. Tools Appl. 2005, 26, 59–80. [Google Scholar] [CrossRef]
- Goto, K.; Hatabu, A.; Nishizuka, H.; Matsunaga, K.; Nakamura, R.; Mochizuki, Y.; Miyazaki, T.H. 264 video encoder implementation on a low-power DSP with low and stable computational complexity. In Proceedings of the IEEE Workshop on Signal Processing Systems Design and Implementation, Banff, AB, Canada, 2–4 October 2006; pp. 101–106. [Google Scholar]
- Li, L.; Shen, H.; Wang, T.; Bai, G. Cluster-based Distributed Compressed Sensing for QoS Routing in Cognitive Video Sensor Networks. Conf. Ser. Earth Environ. Sci. 2019, 234, 012112. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Number of video sensors | 200 |
| Number of channels | 10 |
| Transmission range | 15 m |
| Offset angle | |
| Sensing radius | 30 m |
| Image size | |
| 50 nJ/b | |
| 10 pJ/b/m | |
| 2 | |
| Transmission rate | 2 Mbps |
| 1 | |
| 0.8 | |
| 1.196 mA | |
| (encoder) | 2.3 Mcycles |
| 0.67 nF | |
| (decoder) | 0.14 M |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shen, H.; Li, L.; Wang, T.; Bai, G. CDCS: Cluster-Based Distributed Compressed Sensing to Facilitate QoS Routing in Cognitive Video Sensor Networks. Entropy 2019, 21, 345. https://doi.org/10.3390/e21040345
Shen H, Li L, Wang T, Bai G. CDCS: Cluster-Based Distributed Compressed Sensing to Facilitate QoS Routing in Cognitive Video Sensor Networks. Entropy. 2019; 21(4):345. https://doi.org/10.3390/e21040345
Chicago/Turabian StyleShen, Hang, Lingli Li, Tianjing Wang, and Guangwei Bai. 2019. "CDCS: Cluster-Based Distributed Compressed Sensing to Facilitate QoS Routing in Cognitive Video Sensor Networks" Entropy 21, no. 4: 345. https://doi.org/10.3390/e21040345
APA StyleShen, H., Li, L., Wang, T., & Bai, G. (2019). CDCS: Cluster-Based Distributed Compressed Sensing to Facilitate QoS Routing in Cognitive Video Sensor Networks. Entropy, 21(4), 345. https://doi.org/10.3390/e21040345