
Optimal 3D Angle of Arrival Sensor Placement with Gaussian Priors


Abstract
:1. Introduction
- A detailed 3D AOA optimal sensor placement problem with Gaussian priors is analyzed using the A-optimality criterion (minimizing the trace of the inverse FIM). We show analytically that the problem can be transformed to diagonalize the AOA-based FIM under the A-optimality criterion.
- The invariance property of the 3D rotation for the AOA-based FIM with Gaussian priors is deduced. Thus, the Gaussian covariance matrix of the FIM can be diagonalized via 3D rotation.
- An optimal sensor placement method using 3D rotation is proposed for when prior information exists as to the target location using the invariance property of the AOA-based FIM and the A-optimality criterion.
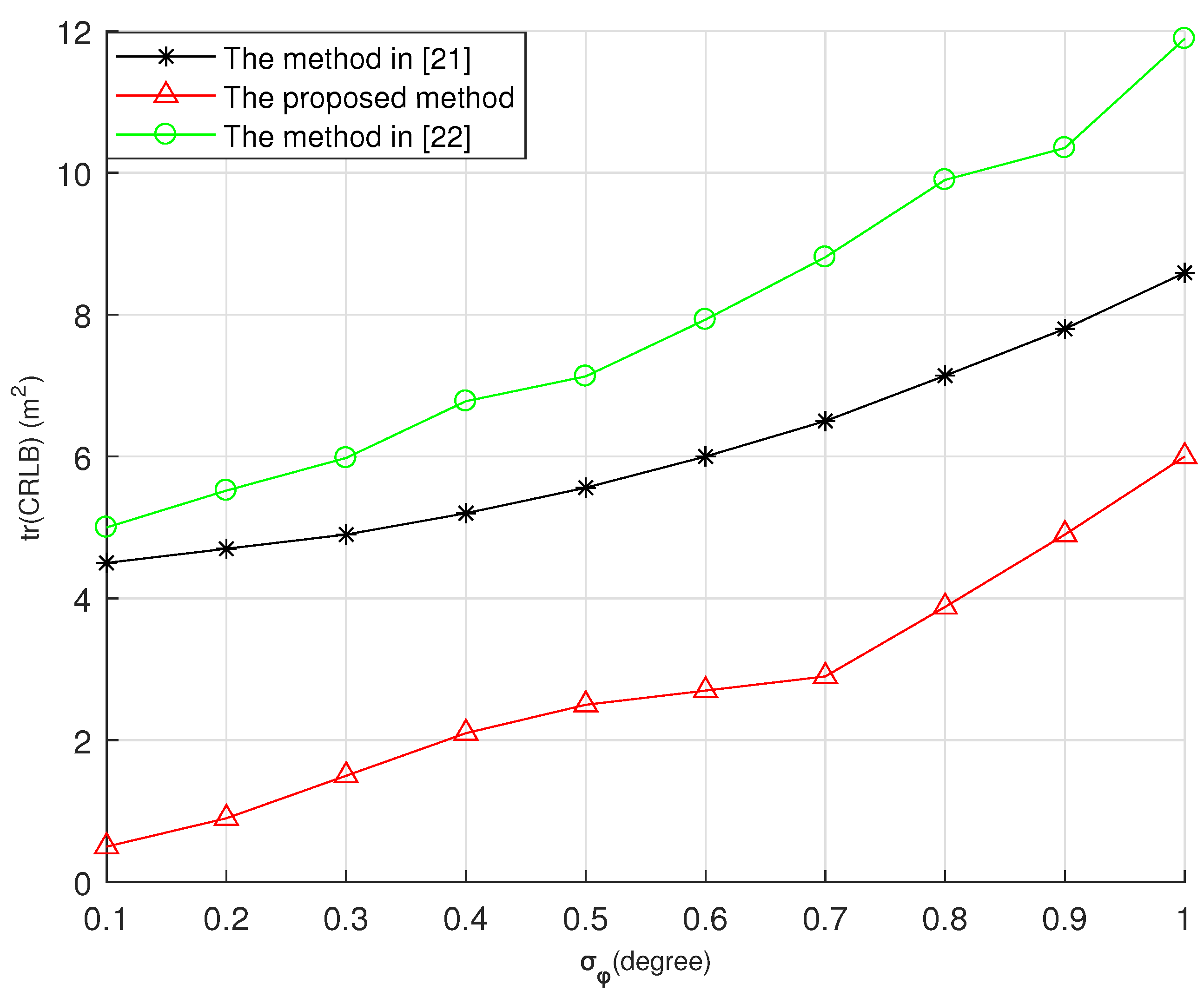
- Simulation studies are presented to demonstrate the analytical findings. The comparison results show that the proposed method significantly improves the localization performance.
2. Problem Formulation
3. The Proposed Method
3.1. 3D Rotation Matrix
3.2. Invariance to 3D Rotation for AOA-Based FIM
4. Optimal Sensor Placement with Gaussian Priors
4.1. Optimal Sensor Placement for One Sensor
- Configuration 1: The values of resistors and can be reduced owing to the parallel resistors and . Thus, the angle is suited for and .
- Configuration 2: The value of resistor is eliminated, so the angle is suited for .
- Configuration 3: The value of resistor , can be reduced owing to the parallel resistors and . Thus, the angle is suited for , .
- Configuration 4: The value of resistor is eliminated, so the angle is suited for .
4.2. Optimal Sensor Placement for
4.3. Optimal Sensor Placement for
5. Simulation Studies
5.1. Gradient Descent Alogorithm Simulations
- Example 1: For optimal sensor placement with one sensor
- Example 2: Optimal sensor placement for two and three sensors:
5.2. The Comparison Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. The Deduction of MAP
References
- Sayed, A.H.; Tarighat, A.; KandKhajehnouri, N. Network-based wireless location: Challenges faced in developing techniques for accurate wireless location information. IEEE Signal Process. 2005, 22, 24–40. [Google Scholar] [CrossRef]
- Akyildiz, F.; Su, W.; Sankarasubramaniam, Y.; Cayirci, E. A survey on sensor networks. IEEE Commun. Mag. 2002, 40, 102–114. [Google Scholar] [CrossRef] [Green Version]
- Shen, J.; Molisch, A.F.; Salmi, J. Accurate passive location estimation using TOA measurements. IEEE Trans. Wirel. Commun. 2012, 11, 2182–2192. [Google Scholar] [CrossRef]
- Chan, Y.T.; Ho, K.C. A simple and efficient estimator for hyperbolic location. IEEE Trans. Signal Process. 1994, 42, 1905–1915. [Google Scholar] [CrossRef] [Green Version]
- Kułakowski, P.; Vales-Alonso, J.; Egea-Lopez, E.; Ludwin, W.; García-Harob, J. Angle-of-arrival localization based on antenna arrays for wless sensor. Comput. Elect. Eng. 2010, 36, 1181–1186. [Google Scholar] [CrossRef]
- Peng, R.; Sichitiu, M.L. Angle of arrival localization for wireless sensor networks. In Proceedings of the 2006 3rd Annual IEEE Communications Society on Sensor and Ad Hoc Communications and Networks, Reston, VA, USA, 28 September 2006; pp. 374–382. [Google Scholar]
- Wang, C.; Qi, F.; Shi, G.; Wang, X. Convex combination based target localization with noisy angle of arrival measurements. IEEE Commun. Lett. 2014, 3, 14–17. [Google Scholar] [CrossRef]
- Li, X. Performance study of RSS-based location estimation techniques for wireless sensor networks. Proc. IEEE Mil. Commun. Conf. 2005, 2, 1064–1068. [Google Scholar]
- Bishop, A.N.; Jensfelt, P. An optimality analysis of sensor-target geometries for signal strength based localization. In Proceedings of the 2009 International Conference on Intelligent Sensors, Sensor Networks and Information Processing (ISSNIP), Melbourne, Australia, 7–10 December 2009; pp. 127–132. [Google Scholar]
- Doǧançay, K. Bias compensation for the bearings-only pseu-dolinear target track estimator. IEEE Trans. Signal Process. 2006, 54, 59–68. [Google Scholar] [CrossRef]
- Shao, H.J.; Zhang, X.P.; Wang, Z. Efficient closed-form algorithms for AOA based self-localization of sensor nodes using auxiliary variables. IEEE Trans. Signal Process. 2014, 62, 2580–2594. [Google Scholar] [CrossRef]
- Doǧançay, K. 3D pseudolinear target motion analysis from angle measurements. IEEE Trans. Signal Process. 2015, 63, 1570–1580. [Google Scholar] [CrossRef]
- Wang, Y.; Ho, K.C. An asymptotically efficient estimator in closed-form for 3-D AOA localization using a sensor network. IEEE Trans. Wirel. Commun. 2015, 14, 6524–6535. [Google Scholar] [CrossRef]
- Chen, X.; Gang, W.; Ho, K.C. Semidefinite relaxation method for unified near-Field and far-Field localization by AOA—ScienceDirect. Signal Process. 2021, 181, 107916. [Google Scholar] [CrossRef]
- Doğançay, K.; Hmam, H. Optimal angular sensor separation for AOA localization. Signal Process. 2008, 88, 1248–1260. [Google Scholar] [CrossRef]
- Bishop, A.N.; Fidan, B.; Anderson, B.; Doğançay, K.; Pathirana, P.N. Optimality analysis of sensor-target localization geometries. Automatica 2010, 46, 479–492. [Google Scholar] [CrossRef]
- Xu, S.; Doğançay, K. Optimal sensor deployment for 3D AOA target localization. In Proceedings of the 2015 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), South Brisbane, Australia, 19–24 April 2015; pp. 2544–2548. [Google Scholar]
- Nguyen, N.H.; Doğançay, K. Optimal Geometry Analysis for Multistatic TOA Localization. IEEE Trans. Signal Process. 2016, 64, 4180–4193. [Google Scholar] [CrossRef]
- Ucinski, D. Optimal Measurement Methods for Distributed Parameter System Identification; CRC Press: Boca Raton, FL, USA, 2004. [Google Scholar]
- Moreno-Salinas, D.; Pascoal, A.; Aranda, J. Sensor networks for optimal target localization with bearings-only measurements in constrained three-dimensional scenarios. Sensors 2013, 13, 10386–10417. [Google Scholar] [CrossRef] [Green Version]
- Xu, S.; Doğançay, K. Optimal sensor placement for 3-D angle-of-arrival target localization. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 1196–1211. [Google Scholar] [CrossRef]
- Zhao, S.; Chen, B.M.; Lee, T.H. Optimal sensor placement for target localisation and tracking in 2D and 3D. Int. J. Control 2013, 86, 1687–1704. [Google Scholar] [CrossRef]
- Fang, X.; Li, J. Frame Theory for Optimal Sensor Augmentation Problem of AOA Localization. IEEE Signal Process. Lett. 2018, 25, 1310–1314. [Google Scholar] [CrossRef]
- Isaacs, J.T.; Klein, D.J.; Hespanha, J.P. Optimal sensor placement for time difference of arrival localization. In Proceedings of the Proceedings of the 48h IEEE Conference on Decision and Control (CDC) Held Jointly with 2009 28th Chinese Control Conference, Shanghai, China, 15–18 December 2009; pp. 7878–7884. [Google Scholar]
- Nguyen, N.H. Optimal geometry analysis for target localization with bayesian priors. IEEE Access 2021, 9, 33419–33437. [Google Scholar] [CrossRef]
- Yang, C.; Kaplan, L.; Blasch, E. Performance measures of covariance and information matrices for resource management for target state estimation. IEEE Trans. Aero. Electron. Syst. 2012, 48, 2594–2613. [Google Scholar] [CrossRef]
- Yang, C.; Kaplan, L.; Blasch, E.; Bakich, M. Optimal placement of heterogeneous sensors for targets with Gaussian priors. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 1637–1653. [Google Scholar] [CrossRef]
- Yang, C.; Kaplan, L.; Blasch, E.; Bakich, M. Optimal placement of heterogeneous sensors in target tracking. In Proceedings of the 14th International Conference on Information Fusion, Chicago, IL, USA, 5–8 July 2011; pp. 1–8. [Google Scholar]
- Doğançay, K. Relationship between geometric translations and TLS estimation bias in bearings-only target localization. IEEE Trans. Signal Process. 2008, 56, 1005–1017. [Google Scholar] [CrossRef]
- Xu, S.; Ou, Y.; Wu, X. Optimal sensor placement for 3-D time-of-arrival target localization. IEEE Trans. Signal Process. 2019, 67, 5018–5031. [Google Scholar] [CrossRef]
- Luo, J.; Zhang, X.; Wang, Z.; Lai, X. On the accuracy of passive source localization using acoustic sensor array networks. IEEE Sens. J. 2017, 17, 1795–1809. [Google Scholar] [CrossRef]
- Xu, S. Optimal sensor placement for target localization using hybrid RSS, AOA and TOA measurements. IEEE Commun. Lett. 2020, 24, 1966–1970. [Google Scholar]
- Luo, J.A.; Shao, X.H.; Peng, D.L.; Zhang, X.P. A novel subspace approach for bearing-only target localization. IEEE Sens. J. 2019, 19, 8174–8182. [Google Scholar] [CrossRef]
- Kay, S.M. Fundamentals of Statistical Signal Processing: Estimation Theory; Prentice-Hal. Press: Englewood Cliffs, NJ, USA, 1993. [Google Scholar]
- Zhang, F.; Sun, Y.; Zou, J.; Zhang, D.; Wan, Q. Closed-form localization method for moving target in passive multistatic radar network. IEEE Sens. J. 2020, 20, 980–990. [Google Scholar] [CrossRef]
- Nguyen, N.H.; Doğançay, K. Closed-form algebraic solutions for Angle-of-Arrival source localization with Bayesian priors. IEEE Trans. Wirel. Commun. 2019, 18, 3827–3842. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Configuration | |||
|---|---|---|---|
| 1 | 0 | ||
| 2 | |||
| 3 | 0 | 0 | |
| 4 | 0 |
| Configuration | |||
|---|---|---|---|
| 1 | 0 | 0 | |
| 2 | 0 | ||
| 3 | 0 | ||
| 4 | c |
| Example 2 | |||
|---|---|---|---|
| Case A | 5.4678 | 5.4620 | / |
| Case B | 5.5156 | / | 5.4620 |
| Case C | 2.5389 | 2.5310 | / |
| Case D | 2.5680 | / | 2.5310 |
| Number | Method | MSE | Bias Norm |
|---|---|---|---|
| The proposed method | 6.12 | 0.1472 | |
| The method in [21] | 12.35 | 0.8225 | |
| The method in [22] | 14.67 | 1.3557 | |
| The proposed method | 4.32 | 0.0925 | |
| The method in [21] | 9.97 | 0.4634 | |
| The method in [22] | 11.43 | 0.8143 | |
| The proposed method | 1.54 | 0.055 | |
| The method in [21] | 4.81 | 0.2415 | |
| The method in [22] | 5.94 | 0.5468 | |
| The proposed method | 0.48 | 0.0123 | |
| The method in [21] | 1.61 | 0.1022 | |
| The method in [22] | 2.58 | 0.3967 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, R.; Chen, J.; Tan, W.; Yan, Q.; Cai, C. Optimal 3D Angle of Arrival Sensor Placement with Gaussian Priors. Entropy 2021, 23, 1379. https://doi.org/10.3390/e23111379
Zhou R, Chen J, Tan W, Yan Q, Cai C. Optimal 3D Angle of Arrival Sensor Placement with Gaussian Priors. Entropy. 2021; 23(11):1379. https://doi.org/10.3390/e23111379
Chicago/Turabian StyleZhou, Rongyan, Jianfeng Chen, Weijie Tan, Qingli Yan, and Chang Cai. 2021. "Optimal 3D Angle of Arrival Sensor Placement with Gaussian Priors" Entropy 23, no. 11: 1379. https://doi.org/10.3390/e23111379
APA StyleZhou, R., Chen, J., Tan, W., Yan, Q., & Cai, C. (2021). Optimal 3D Angle of Arrival Sensor Placement with Gaussian Priors. Entropy, 23(11), 1379. https://doi.org/10.3390/e23111379