1. Introduction
The Hadamard Programme about non-linear equations concerns the following:
- (a)
the solvability;
- (b)
the uniqueness;
- (c)
the dependence on parameters.
Note that (c) can be viewed (and is sometimes called) as a type of a stability, which is not to be confused with the Lyapunov stability as described in [
1]. The issues named as (a) and (b) have been widely considered by the non-linear analysis methods (the variational method, the usage of critical point theory, the method of monotone operators, the degree theory, various fixed point results), see for example [
2,
3,
4,
5] to mention books covering the existence tools pertaining to the method of monotone operators applied here. Apart from the major reference books mentioned, there are a number of recent results dealing with the not necessarily variational existence of boundary value problems, and also with a type of approximation leading to the solvability of a given problem. Let us mention, without being exhaustive, for example, [
6] where the celebrated Leray–Lions Theorem is utilized in order to generate a sequence which further approximates the solution to the Dirichlet problem with the
-Laplacian. In [
7], the Leray–Schauder degree is used to investigate the equations on integers governed by the
-Laplacian which may further serve as an approximating sequence to some boundary value problem. Problems driven by the
-Laplacian were investigated by the Harnack inequality, combined with fixed point approaches pertaining to the Bohnenblust–Karlin fixed point theorem in [
8] and the Schauder, the Krasnosel’skii fixed point theorems in [
9]. Boundary value problems for equations and systems with the
p-Laplacian, as well as bounded or singular homeomorphisms are considered by the Krasnosel’skii type compression–expansion arguments and by a weak Harnack type inequality in [
10].
On the other hand, the third issue has not been given that much attention, we can mention [
11] describing the variational approach towards the dependence on parameters and also [
12] where monotonicity methods are used. Some abstract scheme best reflecting the type of stability applied here allowing for various parameters is to be found in [
13], where stability or well-posedness results are proved for families of semi-linear operator equations. There was also some research relating the dependence on eigenvalues of the Dirichlet problem with the
p-Laplacian as
p varies. All these sources mentioned employ the uniform bound on the sequence of solutions together with their weak characterization and suitable embedding results. There is also research in a different direction, which not only reflects the dependence on parameters. Namely, in [
14] it is considered the convergence of eigenvalues of the
p-Laplacian as
by using approximation of
functions by
functions in the sense of strict convergence on
. Paper [
15] concerns the case of the variational eigenvalues of the
-Laplacian under the uniform convergence of the exponents investigated by variational methods. We mention also the recent [
16] which treats problems with the right hand side independent of the sought function which investigates the dependence of gradients of solutions as
. In this paper, we are concerned with the dependence on non-linear functional parameters for problems governed by the
p-Laplacian also with
p being treated as a numerical parameter. Contrary to [
11,
12,
13] we do not concentrate only on problems governed by the (negative) Laplacian but include the boundary problems driven by
p-laplacian for
into our consideration. Moreover, the approach towards the stability is based not on the investigation of the sequence of solutions corresponding to the sequence of parameters but on the analysis of the solution operators which makes our main stability result, namely Theorem 4, independent of the existence method (among mentioned above) which is employed in order to prove the solvability of the relevant (non-linear) equation. We allow for
due to tools which we apply for the solvability. An easy example best illustrating what sort of problems we may encounter now follows.
Example 1. Let us consider for the following family of Dirichlet problems with and : Note that for every there exists a solution to (
1)
. If we let and then it is direct to observe that (
1)
is unsolvable with , , see [17] for details. This observation we supply with the following additional conclusions: is not bounded in which means that it is not weakly convergent up to a subsequence, hence it is not (weakly) compact in . In what follows we will provide some general conditions which exclude the phenomena appearing above, as well as conditions on under which one obtains the convergence in Example 1. The paper is organized as follows. We start with some preliminaries about functional space setting, illustrating the relations between spaces involved by some figure and providing some version of the well known Krasnosel’skii Theorem on the continuity of the Niemytskij operator, as well as some general stability results. Boundary value problems with the -Laplacian are next considered with the right hand side independent of the sought function and for which the existence and stability result. The existence is reached by a direct formula exploiting the properties of the increasing homeomorphism and the stability is obtained by investigating the continuity of the solution operator. Next, with the aid of the Browder–Minty Theorem such results are shifted to problems containing non-linear perturbations. Examples and comments are included into the text, corresponding also to the Dirac delta thus showing the possible general applicability of our results.
2. Preliminaries and Auxiliary Results
Following [
17] we denote by
,
, the space of all absolutely continuous functions with
-integrable derivative. For another approach towards the Sobolev spaces on
, see [
18]. We refer is the sequel to both sources for the background. If not said otherwise, we consider any
. We endow
with a standard norm
Recall that inclusion
is continuous for every
p and compact if
. We denote
and consider it with a norm
equivalent with
on
. A continuous dual of
will be denoted by
, here and in the sequel
q is the Hölder conjugate to
p, that is
. We put
and denote a continuous dual of
by
. The
Poincaré and the
Sobolev inequalities are as follows: for all
we have
where
and
is the optimal constant in the Poincaré inequality. Ref. [
19] [Chapter 1, Section 4] contains detailed calculations of this constant. The mapping
is increasing and continuous on
and
. Notice that as an immediate consequence of the Sobolev inequality we obtain
where
stands for a norm in
. Denote by
j an continuous embedding
given by
Functional
is called
regular if
for some
. We denote
Identifying
via the Riesz’ Representation Theorem we get
. Moreover, a mapping
defined by
is an isometry between
and
. Hence
is an isometry between
(identified with a dual of
) and
. Notice that
for all
and that
for every regular
f and any
p. Moreover, continuous inclusion
provides that
for every
p. Therefore, we can define a continuous linear operator
using a formula
, which coincides with the Formula (
3) for every regular
f. Let us observe that compact inclusion
,
, provides that
in
. Here
denotes a weak* convergence of sequence
to element
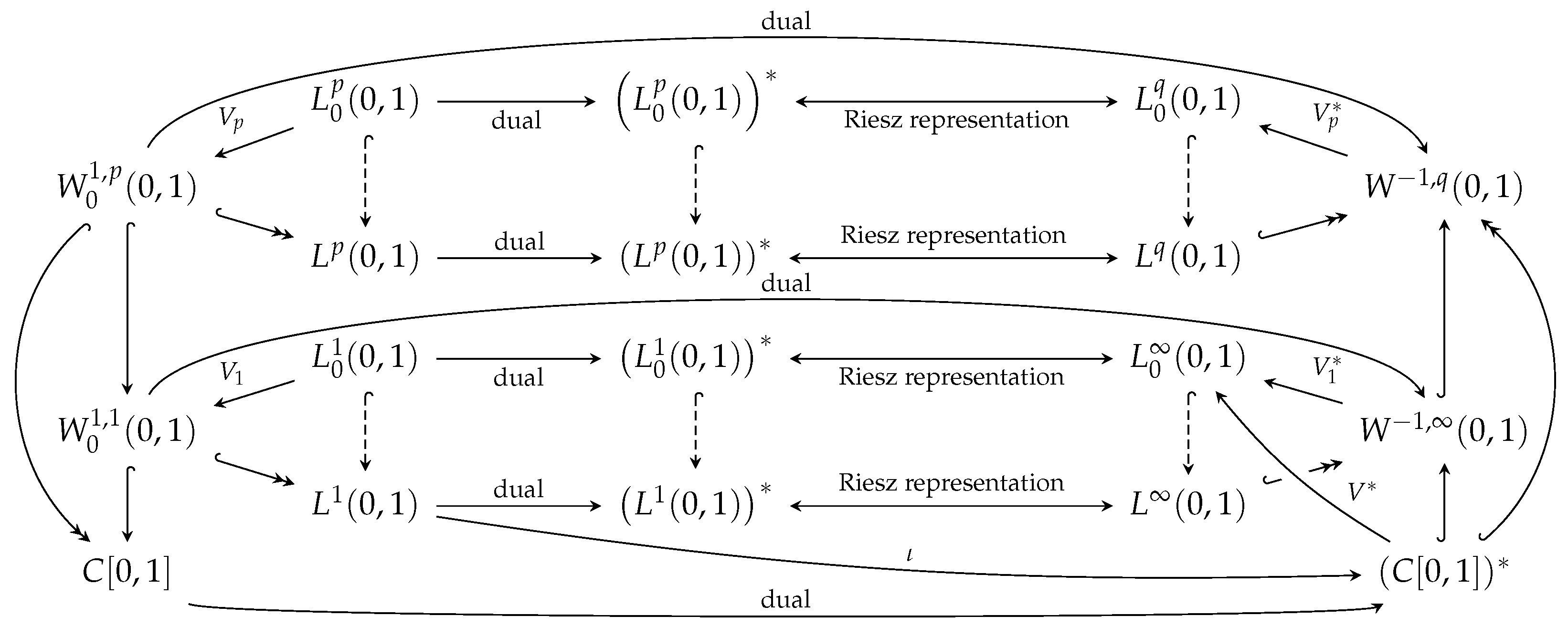
. From now on we equip
with a weak* topology. These relations are summarized in
Figure 1.
Now we turn to the Niemytskii operator. For a closed set
denote
Let be a Carthéodory function, that is:
is Lebesgue-measurable for all ;
is continuous for a.e. .
The following result is a direct consequence of the Lebesgue Dominated Convergence Theorem.
Theorem 1. Assume that , and , all in . If there exists a function such thatthen in . Proof. Without lost of generality we can assume that
,
and
pointwisely a.e. on
. Therefore, assumed continuity of
provides
Finally, the assumption (
4) allows us to apply the Lebesgue Dominated Convergence Theorem. □
Let us consider a compact metric space
and a Banach space
X. Let
be a continuous mapping such that for every bounded set
, the set
is relatively compact in
X. We denote
Lemma 1. Assume that A satisfies conditions given above and let in Σ. Then every sequence such that for , either has a subsequence convergent to some or else it holds satisfy .
Proof. Define . The continuity of A tells us that S is closed. Let . Since , it follows that sets are compact for all . Hence, whenever and , every bounded subsequence of has a further subsequence such that . The continuity of A allows us to conclude that . □
The results obtained can be expressed in terms of the upper semi-continuity of multi-valued mappings, see [
20]. However we do not need such a general approach here.
Now, let us consider a real, reflexive and separable Banach space
X. Operator
is called
coercive if
T is
monotone if
and
T is
strongly continuous if
in
X implies that
in
. We say that
T is
bounded if
is bounded in
for every bounded
.
Theorem 2 ([
21]).
Assume that is continuous, coercive, and bounded. If additionally , where is monotone and is strongly continuous, then . 3. Boundary Value Problems with the -Laplacian
We denote by
the space of all homeomorphism of the real line, equipped with a
topology of almost uniform convergence, namely, we write
if and only if
for every compact
. Direct calculations provide that
whenever
. We will consider
with a distance
, where
. Thus it makes sense to write
with no confusion. For a fixed
and fixed
we consider
Solutions to (
5) are understood in the following sense: an absolutely continuous function
is a solution to (
5) if
, if
is integrable and if
Notice that approach introduced covers also classical cases where the right hand side of (
5) is continuous or integrable.
Example 2. The assumption about allows us to consider problems of the formwhere , and is the Diracs delta
, that is Now we follow with a stability result which best reflects how we understand the dependence on parameters.
Theorem 3. Let in and in . Then problem (
5)
(with and ) has a unique solution for each . Moreover, in for every p. For the proof of Theorem 3 we need an auxiliary lemma, which describes properties of the solution operator. Note that we can replace with , equipped with a weak topology, using the continuous embedding and retain all the assertions.
Lemma 2. For each and for every , there exists a unique satisfying Moreover, for every bounded sets and every norm-bounded set , a mapping is bounded and continuous.
Proof. For all
and
we define
by (
7). Function
is continuous, strictly monotone and
. Hence
for a unique
. Notice that for every increasing
we have
since
and since
. Hence, the boundedness of
c on
follows from inequalities
which hold for every
. Now, let
in
K and
in
. Then
up to a subsequence (not renumbered). Moreover,
in
and the sequence
is a.e. uniformly bounded. Hence we can use Theorem 1 to get
in
for every
p. Then
and hence
. This proves the continuity of
c. □
Since
for all
, using Lemma 2 we obtain a classical solution to (
5):
Therefore, in our setting, notions of weak and classical solution overlap. Now we are in the position to proceed with the proof of main result.
Proof of Theorem 3 Formula (
8) defines a solution to (
5) for every fixed
. Uniqueness of such a solution follows from simple calculation. Now, let
and
in
. Then arguing like in proof of Lemma 2 we obtain
in
for arbitrary
p. But this is equivalent with
in
. □
Remark 1. If functionals are regular, that is for , then assuming in , we get in . One can deduce it easily from (8) bearing in mind that in such a case 


{kind=link}
