
A Hybrid Opinion Formation and Polarization Model

Abstract
:1. Introduction
2. Preliminaries
3. The Proposed Model
- 1
- ;
- 2.
- , ;
- 3.
- s.t. and ,
- 4.
- and ;
- 1.
- s.t. ;
- 2.
- s.t. and .
- 1.
- if there exists , s.t. is a positive (resp. negative, neutral) SDP for , but is not, then we say that is observed to form a consensus of length .
- 2.
- if there exists , and , s.t. is a τ-gap SDP for with but is not, then we say that is observed to form a -polarization of length .
- Both are greater than 0.5;
- One is greater than 0.5 while the other is less than 0.5;
- One is greater than 0.5 while the other is equal;
- Both are less than 0.5;
- One is less than 0.5 while the other is equal;
- Both equal 0.5.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ① | ② | ③ | ||
| - | ④ | ⑤ | ||
| - | - | ⑥ | ||
- 1.
- (both positive) if their previous support degrees are and , then their degrees will increase to and , respectively;
- 2.
- (both negative) if their previous support degrees are and , then their degrees will decrease to , and , respectively.
- The most trivial case is that both agents are neutral; then no updates are needed, so the rule, in this case, is as below.
- If two agents with opposite opinions meet each other, their confidence in previous opinions will be weakened, i.e., one support degree will be increased while the other will be decreased. Without loss of generality, we assume that and the respective updates are described below.
4. Simulations with POE Model
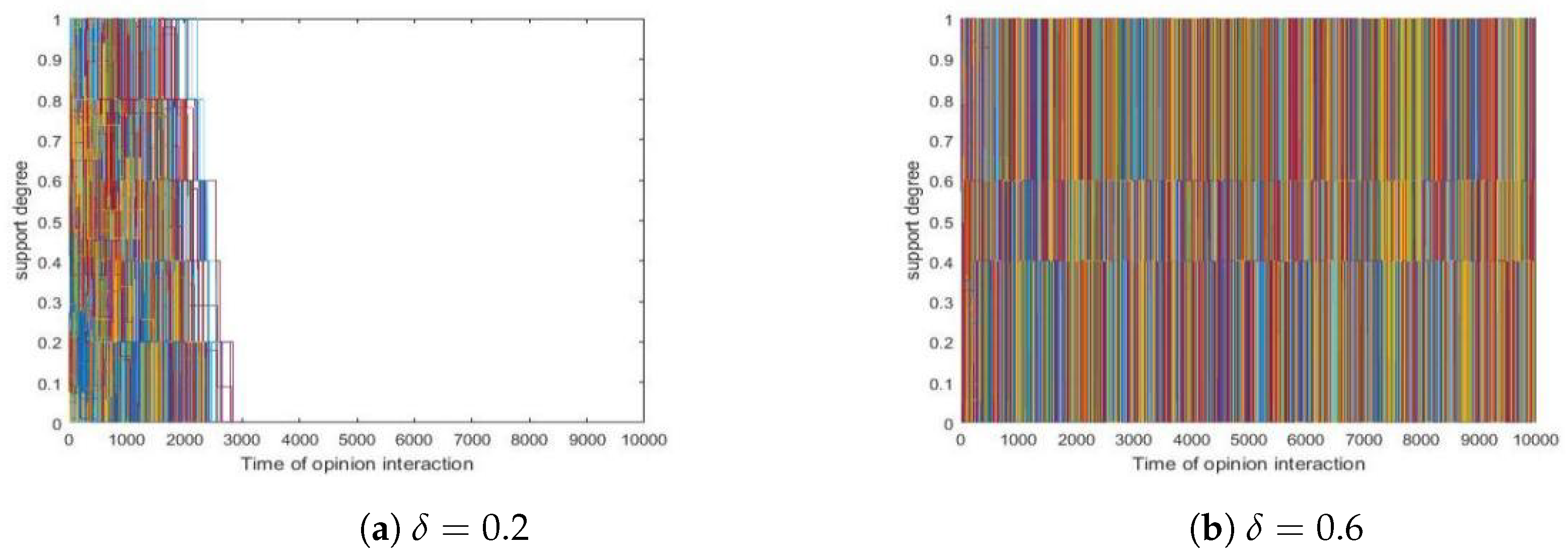
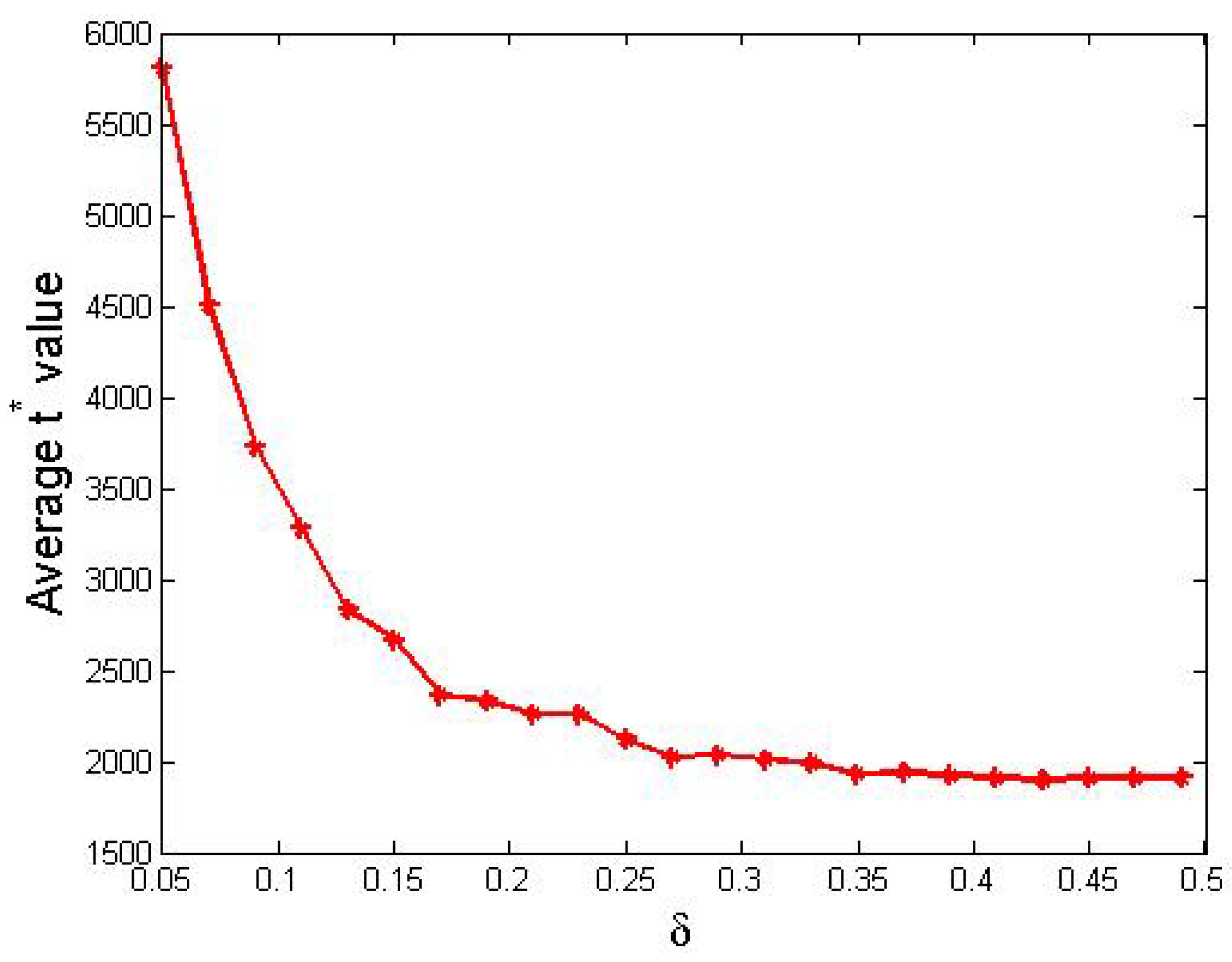
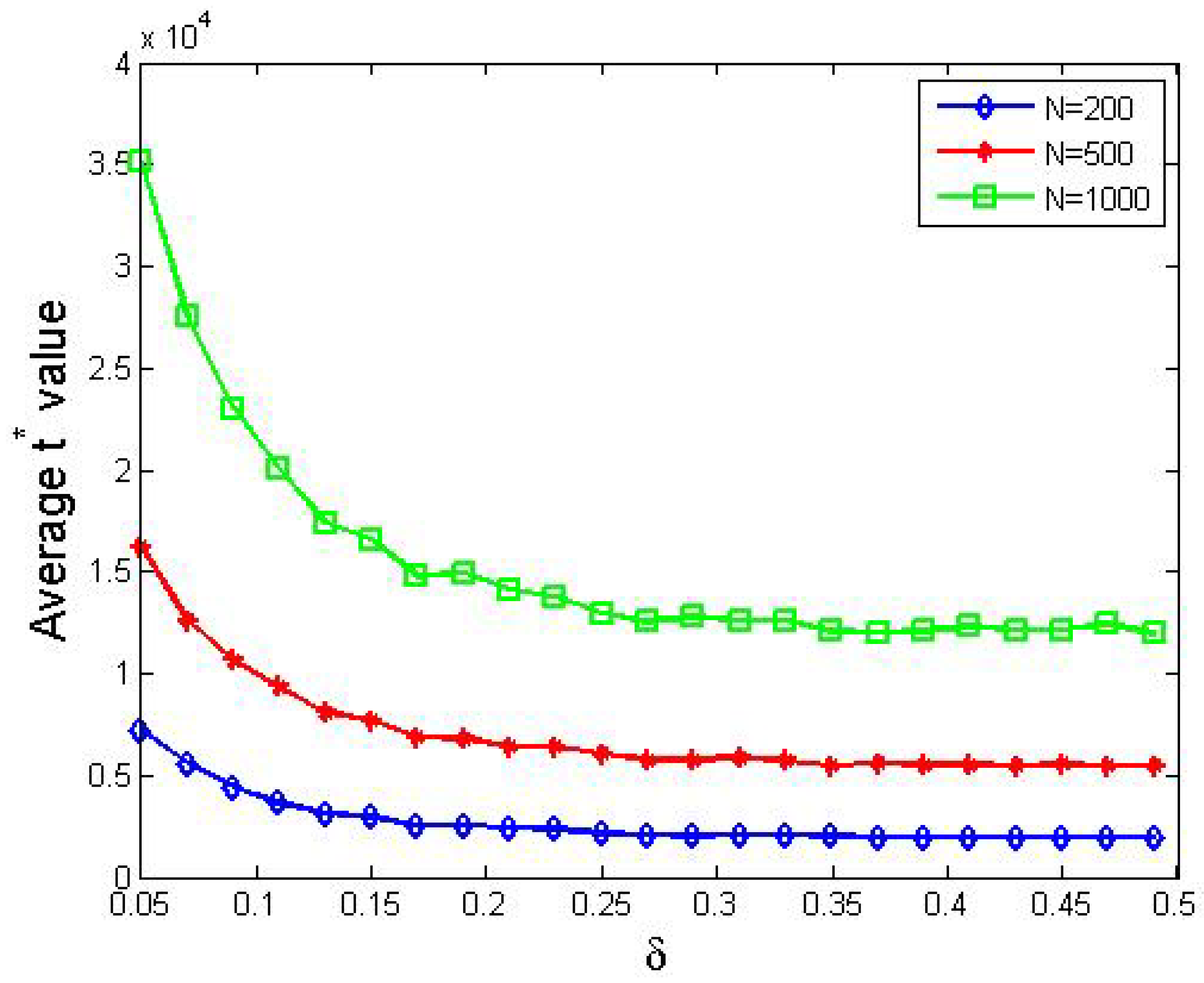
4.1. Comparing Different Values of Support Degree Change
- In general, the value of clearly decreased as increased from 0.05 to 0.49.
- The decreasing trend of wrt. was sharp in the first half where ranged from 0.05 to 0.25 but became smooth in the second half, where is greater than 0.25.
4.2. Comparing Different Distributions of Initial SDP
- The former list evaluated the influences of different proportions of opinions, where the support degree distribution is uniform in both the positive and the negative groups.
- The latter list simulated those initial SDPs that follow the beta and normal distribution, compared to those that follow the uniform distribution.
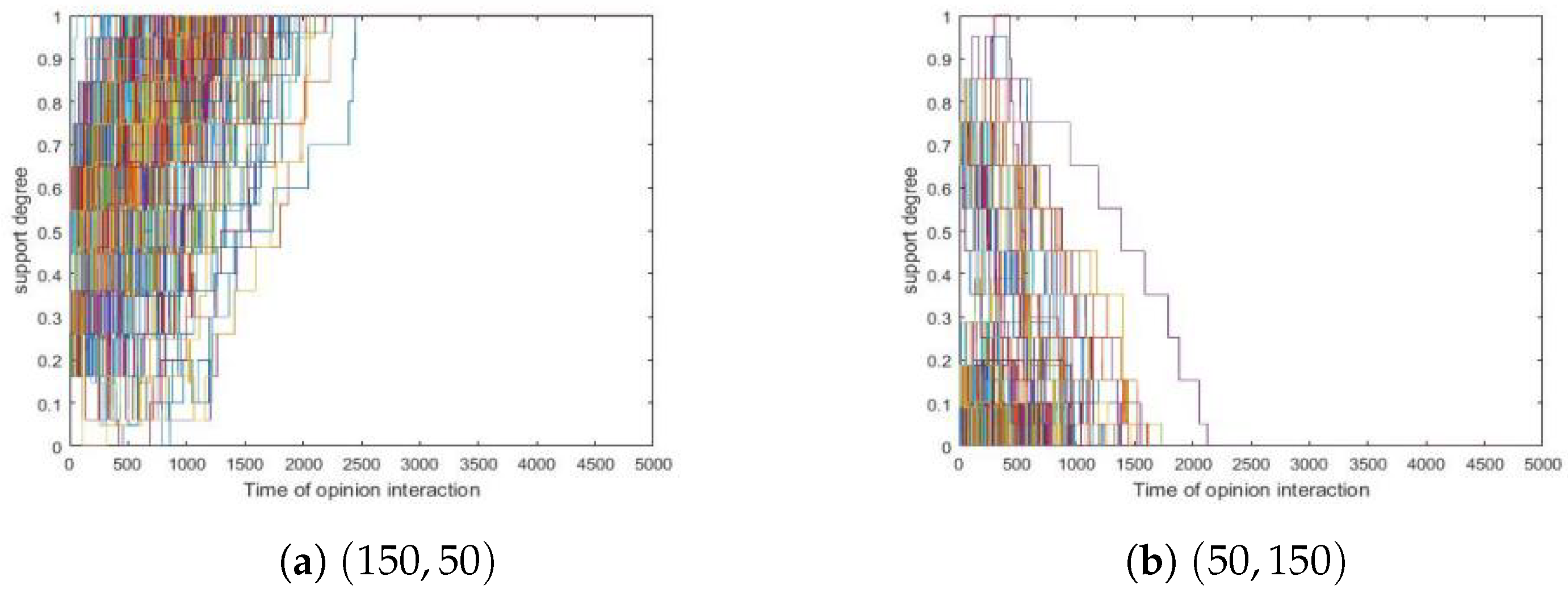
4.2.1. The Effects of Different Proportions of Opinions
- Figure 3a showed simulations where and were 150 and 50, respectively, and this simulation formed a consensus where all agents were positive.
- Figure 3b showed similar situations where and were 50 and 150 and finally, all agents became negative.
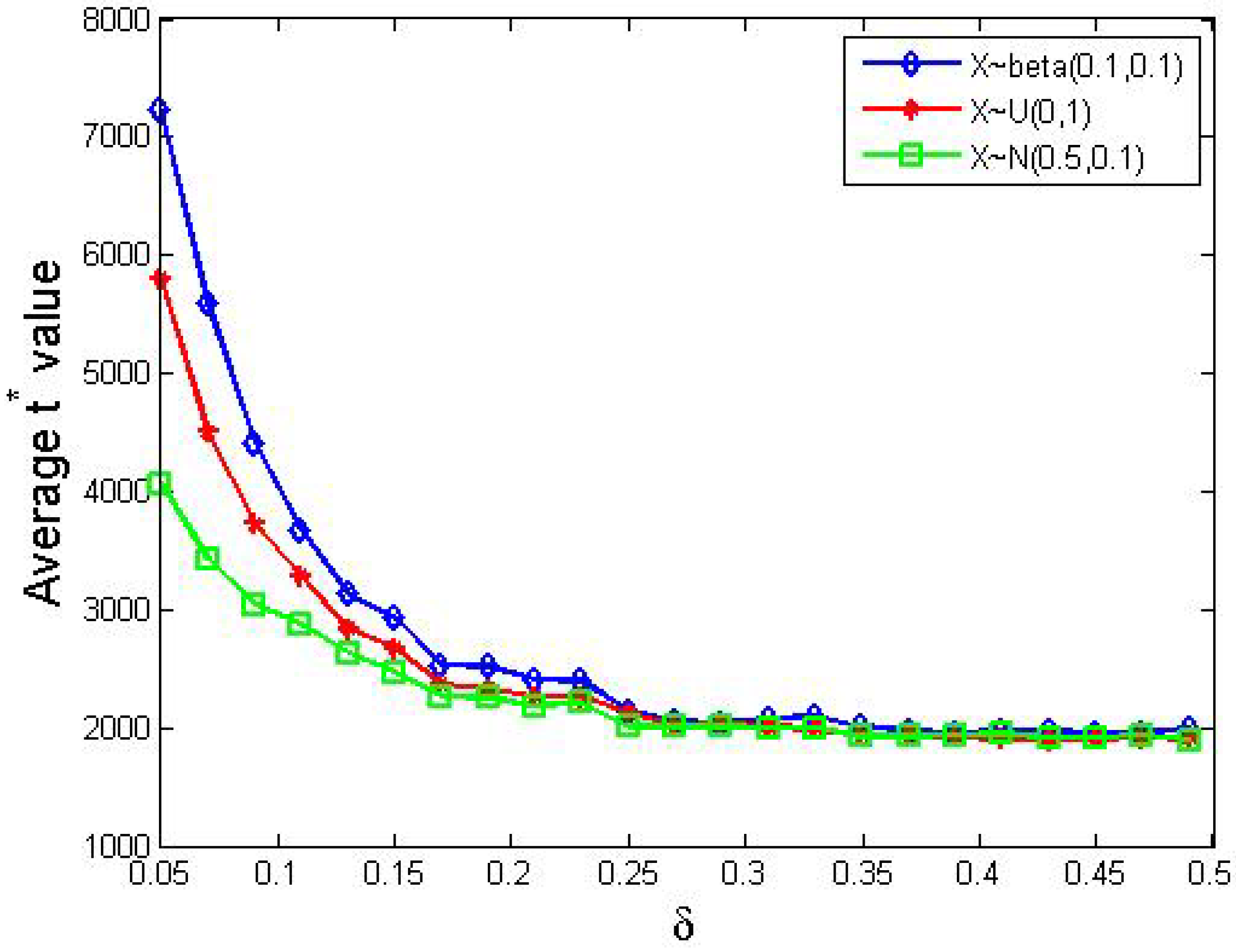
4.2.2. Evaluating Beta and Normal Distributions of Initial SDP
- Obviously, the three curves shared similar trends with the one in Figure 2.
- The beta distribution took the longest to form a consensus, while the normal distribution took the shortest time when is relatively small.
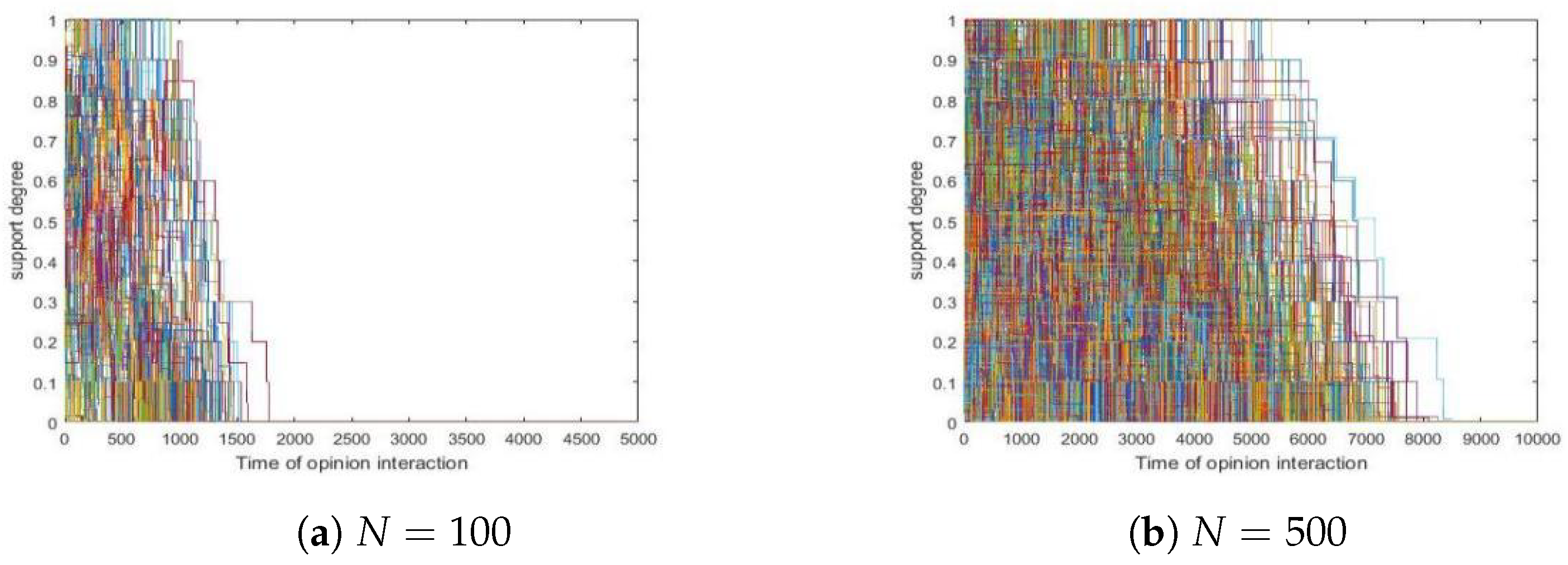
4.3. The Effects of Group Size
- Both runs formed a consensus.
- Larger groups of agents led to later consensus.
- Obviously, the three curves shared similar trends with the one in Figure 2, which indicated that whether their support degrees converge does not depend on the number of agents involved.
- The situation in Figure 5 also occurred in the three cases here.
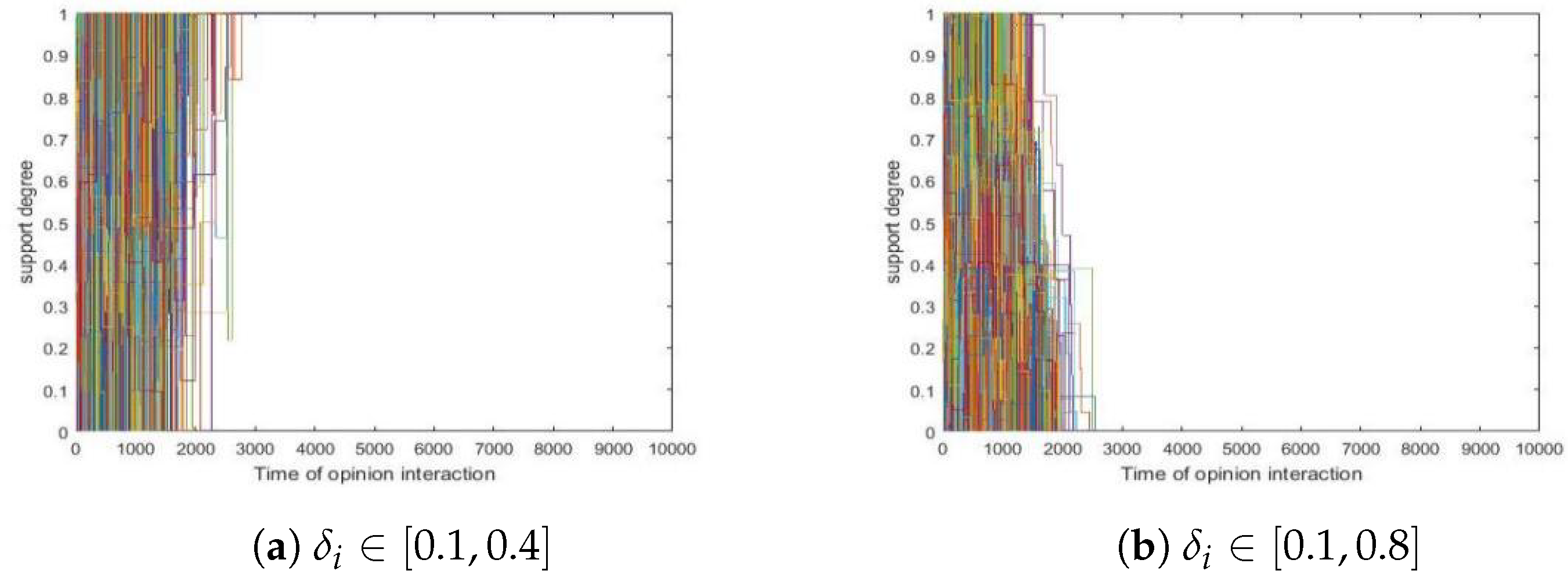
4.4. Non-Uniform SDCs in A Group
- Both initial distributions formed a consensus in the end.
- In Figure 7b, even though there were a significant proportion of agents whose SDCs were greater than 0.5, a consensus was formed eventually.
- Even though there could be a significant proportion of agents who were more open-minded, i.e., they updated their support degrees considerably, a consensus was still reached.
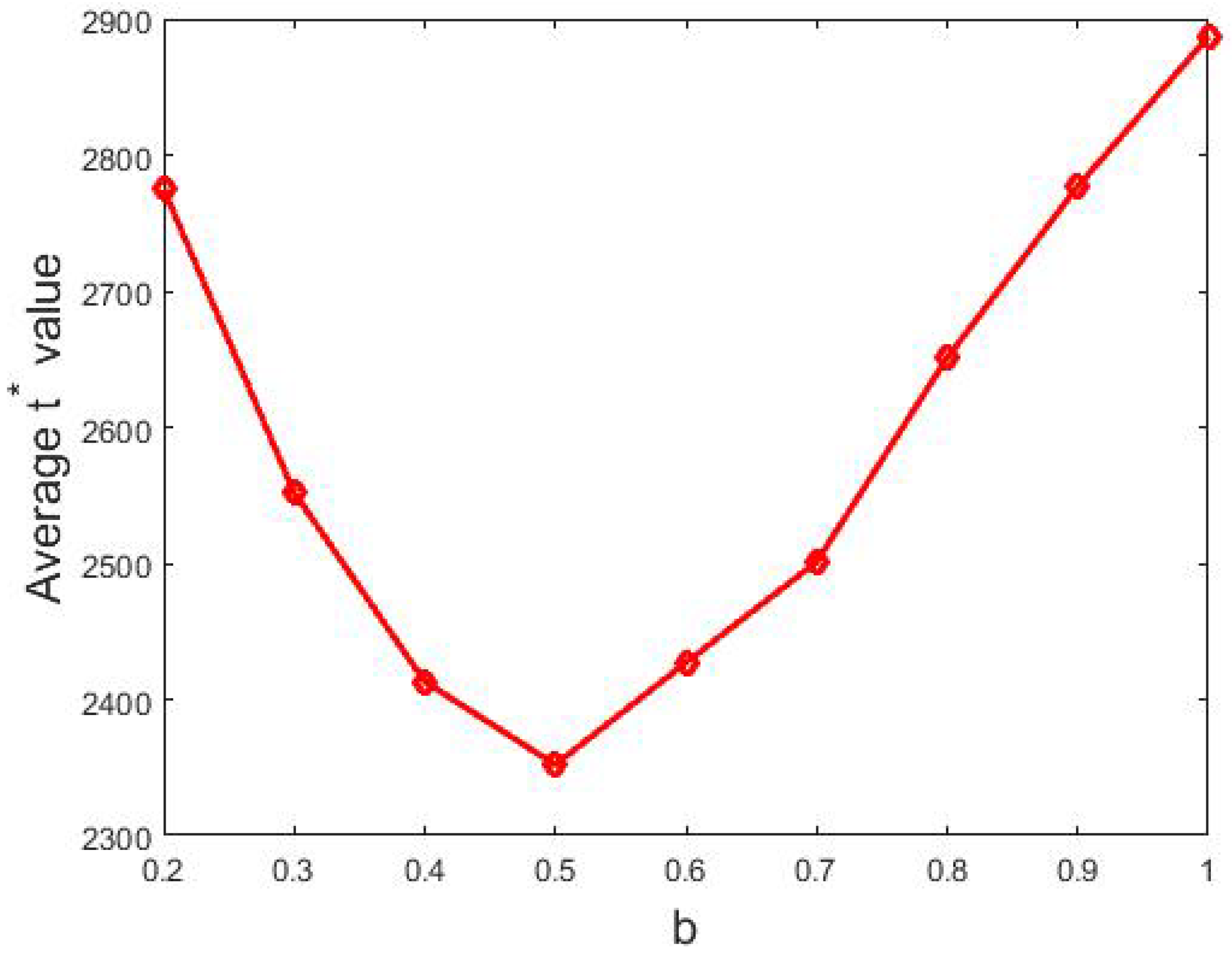
- The curve presented a decrease when but then showed an increase until b reached 1. This indicated that larger SDC values generated an earlier consensus when they were smaller than 0.5. Moreover, it revealed that more open-minded agents with SDC value greater than 0.5 produced a later consensus.
- Since there was a fair proportion of agents with SDC values less than 0.5, they constituted a core that served as a foundation for opinion evolution. Such a core persuaded those open-minded agents with SDC values greater than 0.5 to eventually agree with the opinions of the core.
- As to the speed of convergence, when was small, it took longer to form a consensus which coincided with the mechanism beneath Figure 2. However, when , agents’ support degrees update quite fiercely, so it is not easy to reach a consensus, which was why more time was needed to reach a consensus.
5. Three Mechanisms for Polarization
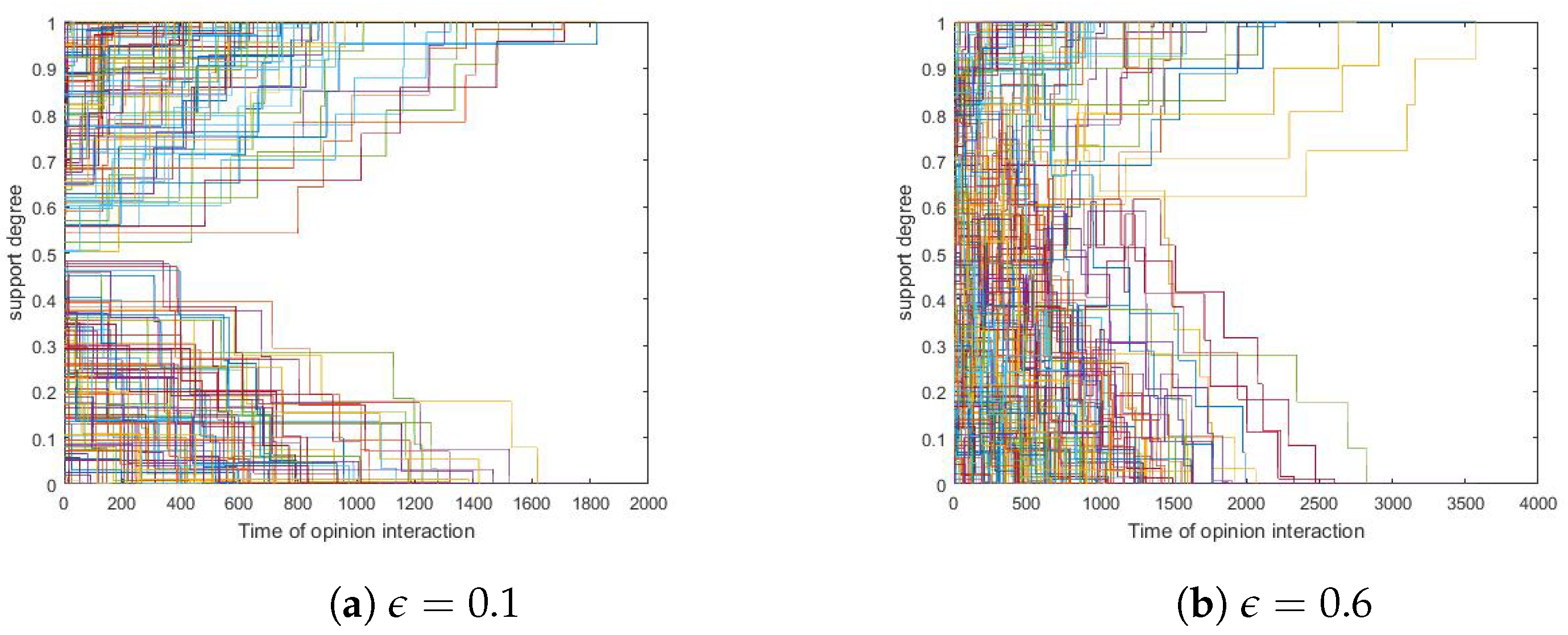
5.1. Communications Limited by Support Degree Differences
- Agents with the same opinion communicate with each other effectively.
- Only when two agents meet with different opinions, do we exert a threshold.
5.2. Polarization through More Effective Interaction with Like-Minded Agents
- The most trivial case is that both agents are neutral and the update rules are just the same as before, i.e., no updates are needed.
- If two agents with different opinions meet each other, one support degree will be increased while the other will be decreased. So their support degrees will still get close, even though by a smaller step in this case. Without loss of generality, we assume that and the respective updates are described below.
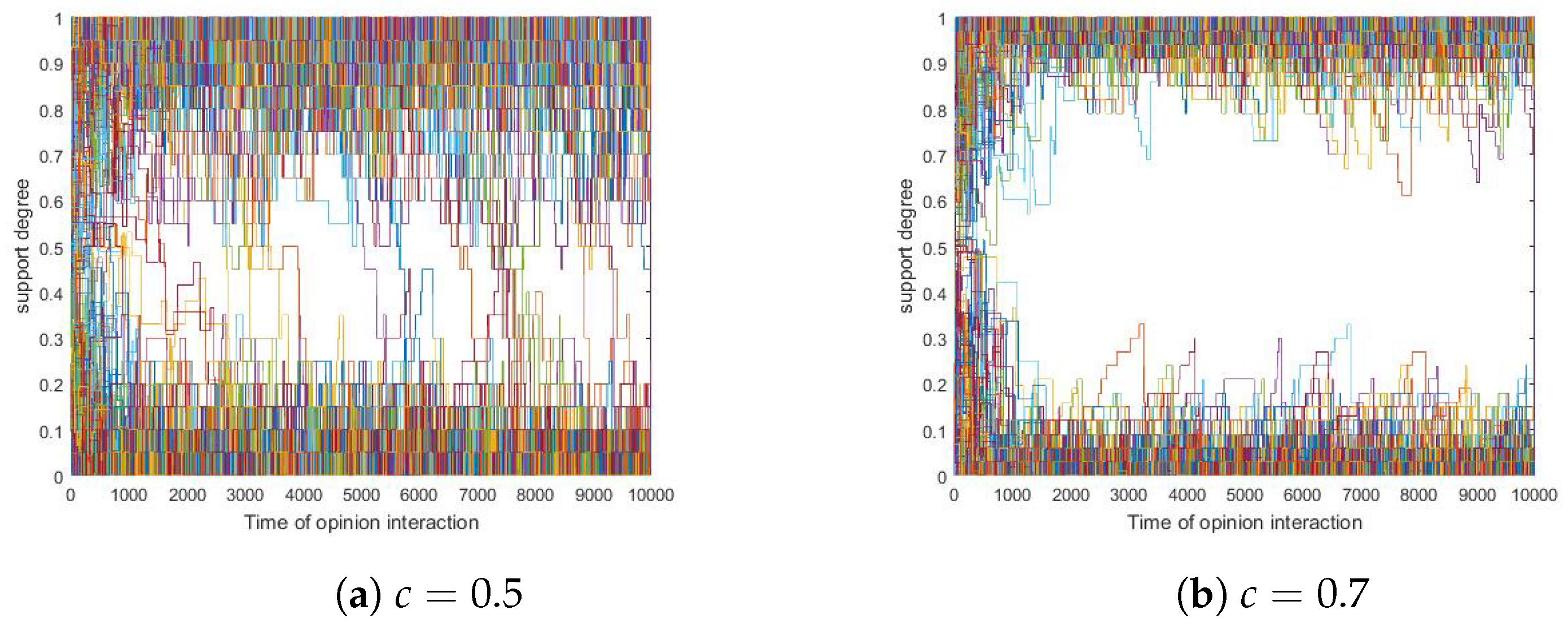
5.3. Polarization through the Higher Chance of Interaction with Like-Minded Agents
| Algorithm 1: PickAgentPair. |
 |
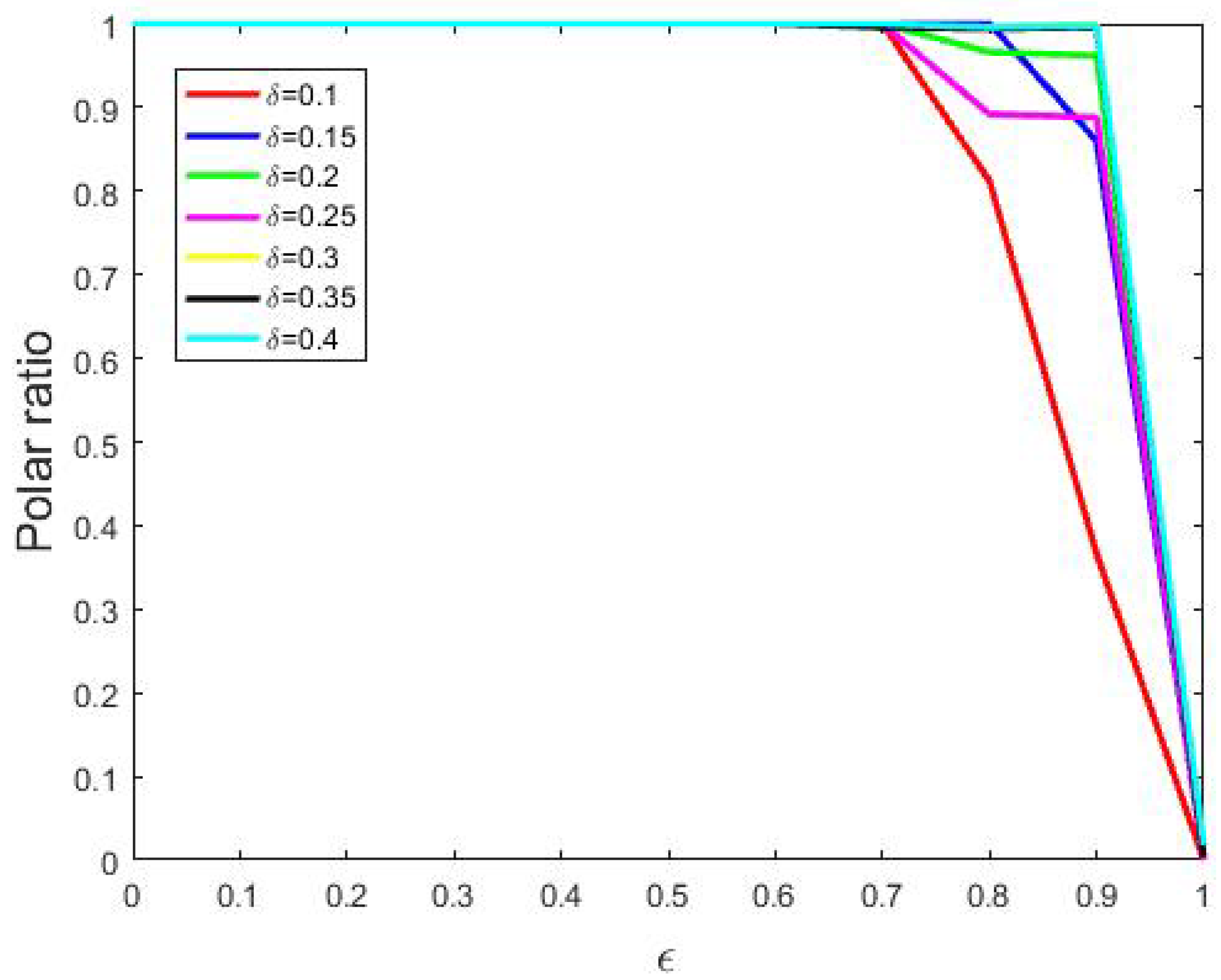
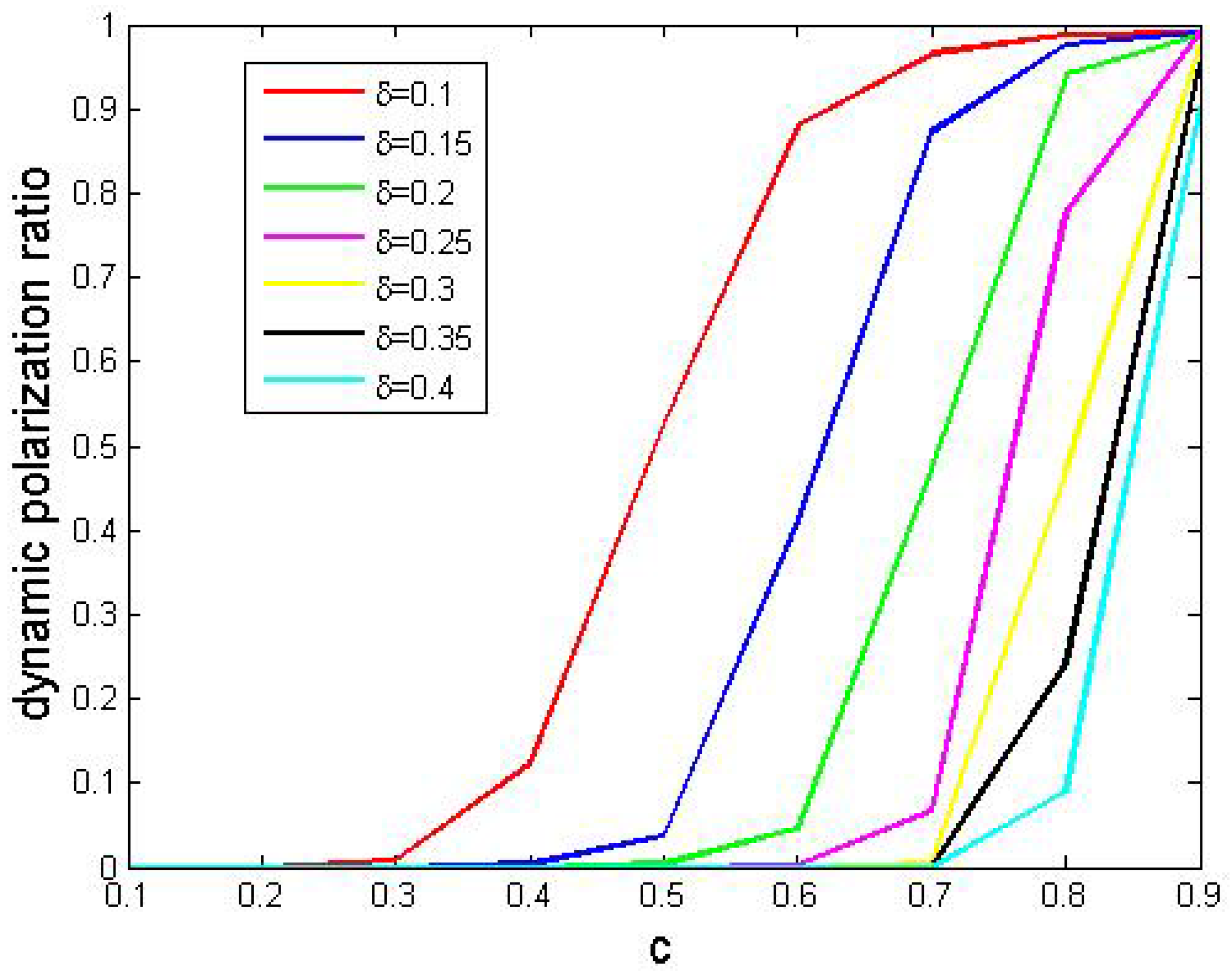
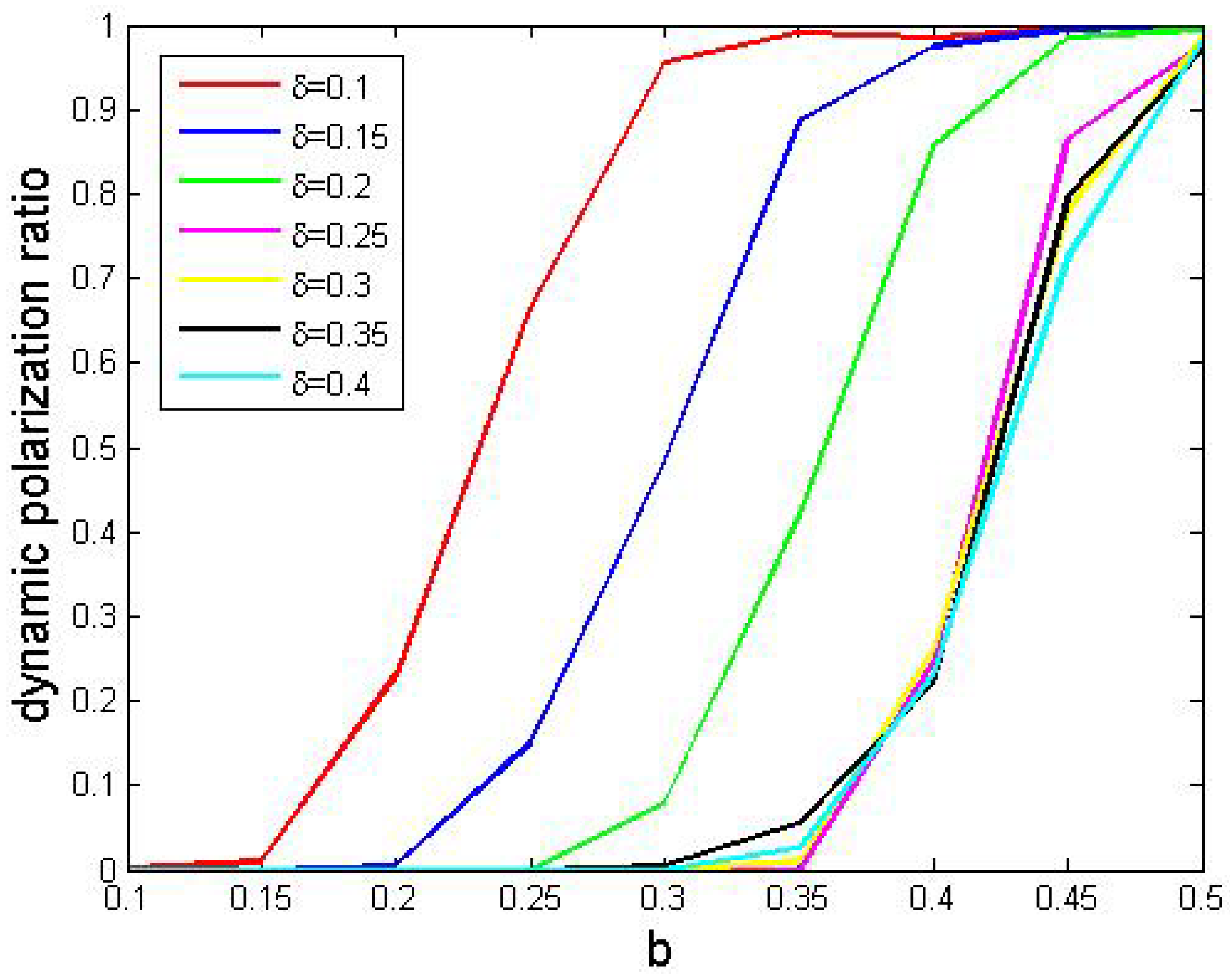
- Obviously, those curves shared similar trends with the one in Figure 12.
- More perturbation resulted in higher dynamic polarization ratios.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Srbu, A.; Loreto, V.; Servedio, V.; Tria, F. Opinion Dynamics: Models, Extensions and External Effects; Springer International Publishing: Berlin/Heidelberg, Germany, 2017. [Google Scholar] [CrossRef] [Green Version]
- Le Pira, M.; Inturri, G.; Ignaccolo, M.; Pluchino, A.; Rapisarda, A. Simulating Opinion Dynamics on Stakeholders’ Networks through Agent-based Modeling for Collective Transport Decisions. Procedia Comput. Sci. 2015, 52, 884–889. [Google Scholar] [CrossRef] [Green Version]
- Li, Q.; Braunstein, L.; Havlin, S.; Stanley, G. Strategy of Competition between Two Groups based on an Inflexible Contrarian Opinion Model. Am. Phys. Soc. 2012, 86, 066101. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Varma, V.S.; Morarescu, I.C.; Lasaulce, S.; Martin, S. Opinion dynamics aware marketing strategies in duopolies. In Proceedings of the 2017 IEEE 56th Annual Conference on Decision and Control (CDC), Melbourne, VIC, Australia, 12–15 December 2017. [Google Scholar] [CrossRef]
- Kozuki, A.; Mahmassani, H.S. Information Acquisition and Social Interaction Mechanisms in Opinion Formation and Market Adoption of Transportation Services. In Proceedings of the 88th Annual Meeting of the Transportation Research Board, Washington, DC, USA, 11–15 January 2009. [Google Scholar]
- Crokidakis, N. Effects of mass media on opinion spreading in the Sznajd sociophysics model. Phys. Stat. Mech. Its Appl. 2011, 391, 1729–1734. [Google Scholar] [CrossRef] [Green Version]
- Wu, Y.; Liu, S.; Yan, K.; Liu, M.; Wu, F. Opinion Flow: Visual Analysis of Opinion Diffusion on Social Media. Vis. Comput. Graph. IEEE Trans. 2014, 20, 1763–1772. [Google Scholar] [CrossRef] [PubMed]
- Ding, Z.; Liang, H.; Dong, Y.; Chiclana, F.; Herrera-Viedma, E.; Cabrerizo, F.J. An opinion control rule with minimum adjustments to support the consensus reaching in bounded confidence model. Procedia Comput. Sci. 2016, 91, 617–624. [Google Scholar] [CrossRef] [Green Version]
- Bravo-Marquez, F.; Gayo-Avello, D.; Mendoza, M.; Poblete, B. Opinion Dynamics of Elections in Twitter. In Proceedings of the 2012 Eighth Latin American Web Congress, Cartagena, Colombia, 25–27 October 2012; pp. 32–39. [Google Scholar] [CrossRef]
- Castro, J.; Lu, J.; Zhang, G.; Dong, Y. Opinion Dynamics-Based Group Recommender Systems. IEEE Trans. Syst. Man Cybern. Syst. 2018, 48, 2394–2406. [Google Scholar] [CrossRef]
- Hashemi, E.; Pirani, M.; Khajepour, A.; Fidan, B. Opinion Dynamics-Based Vehicle Velocity Estimation and Diagnosis. IEEE Trans. Intell. Transp. Syst. 2018, 19, 2142–2148. [Google Scholar] [CrossRef]
- Friedkin, N.E.; Proskurnikov, A.V.; Tempo, R.; Parsegov, S.E. Network science on belief system dynamics under logic constraints. Science 2016, 354, 321–326. [Google Scholar] [CrossRef] [Green Version]
- Bernardo, C.; Wang, L.; Vasca, F.; Hong, Y.; Shi, G.; Altafini, C. Achieving consensus in multilateral international negotiations: The case study of the 2015 Paris Agreement on climate change. Sci. Adv. 2021, 7, eabg8068. [Google Scholar] [CrossRef]
- Montroll, E.W.; Badger, W.W. Introduction to Quantitative Aspects of Social Phenomena; Gordon & Breach: London, UK, 1974. [Google Scholar] [CrossRef]
- Shukla, P. Hysteresis in the zero-temperature random-field Ising model on directed random graphs. Phys. Rev. E 2018, 98, 032144. [Google Scholar] [CrossRef] [Green Version]
- Li, L.; Fan, Y.; Zeng, A.; Di, Z. Binary opinion dynamics on signed networks based on Ising model. Phys. Stat. Mech. Appl. 2019, 525, 433–442. [Google Scholar] [CrossRef]
- Domínguez, A.R.; Arroyo-Duarte, R.; Rincón-Vieyra, F.; Alvarado-Mentado, M. Modeling cancer immunoediting in tumor microenvironment with system characterization through the ising-model Hamiltonian. BMC Bioinform. 2022, 23, 200. [Google Scholar] [CrossRef]
- Takabatake, K.; Yanagisawa, K.; Akiyama, Y. Solving Generalized Polyomino Puzzles Using the Ising Model. Entropy 2022, 24, 354. [Google Scholar] [CrossRef]
- Zukovic, M. Massive Degeneracy And Anomalous Thermodynamics in a Highly Frustrated Ising Model On Honeycomb Lattice. In Proceedings of the International ECMS Conference on Modelling and Simulation, Alesund, Norway, 30 May–3 June 2022; pp. 336–341. [Google Scholar] [CrossRef]
- Sznajd-Weron, K.; Sznajd, J. Opinion evolution in closed community. Int. J. Mod. Phys. 2000, 11, 1157–1165. [Google Scholar] [CrossRef] [Green Version]
- Giménez, M.C.; Revelli, J.A.; Wio, H.S. Non Local Effects in the Sznajd Model: Stochastic resonance aspects. EAI Endorsed Trans. Complex Syst. 2012, 1, e3. [Google Scholar] [CrossRef]
- Chen, H.; Shu, J. Sznajd2: A Community-Aware Opinion Dynamics Model; IEEE: Piscataway, NJ, USA, 2016; pp. 1477–1484. [Google Scholar] [CrossRef]
- Liggett, H. Ergodic Theorems for Weakly Interacting Infinite Systems and the Voter Model. Ann. Probab. 1975, 3, 643–663. [Google Scholar] [CrossRef]
- Chiyomaru, K.; Takemoto, K. Adversarial attacks on voter model dynamics in complex networks. Phys. Rev. E 2021, 106, 014301. [Google Scholar] [CrossRef]
- Majmudar, J.R.; Krone, S.M.; Baumgaertner, B.O.; Tyson, R.C. Voter models and external influence. J. Math. Sociol. 2020, 44, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Latoski, L.C.F.; Dantas, W.G.; Arenzon, J.J. Curvature-driven growth and interfacial noise in the voter model with self-induced zealots. Phys. Rev. E 2022, 106, 014121. [Google Scholar] [CrossRef]
- Doniec, M.; Lipiecki, A.; Sznajd-Weron, K. Consensus, Polarization and Hysteresis in the Three-State Noisy q-Voter Model with Bounded Confidence. Entropy 2022, 24, 983. [Google Scholar] [CrossRef]
- Golebiowska, M.; Sznajd-Weron, K. The Evolution of Political Views Within the Model with Two Binary Opinions. In Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2021; Volume 12744, pp. 302–308. [Google Scholar] [CrossRef]
- Galam, S. Application of statistical physics to politics. Phys. Stat. Mech. Appl. 1999, 274, 132–139. [Google Scholar] [CrossRef] [Green Version]
- Balankin, A.S.; Martínez-Cruz, M.; Gayosso Martínez, F.; Mena, B.; Tobon, A.; Patiño-Ortiz, J.; Patiño-Ortiz, M.; Samayoa, D. Ising percolation in a three-state majority vote model. Phys. Lett. A 2017, 381, 440–445. [Google Scholar] [CrossRef]
- Vilela, A.L.; Pereira, L.F.C.; Dias, L.; Stanley, H.E.; da Silva, L.R. Majority-vote model with limited visibility: An investigation into filter bubbles. Phys. Stat. Mech. Appl. 2021, 563, 125450. [Google Scholar] [CrossRef]
- Chen, H.; Wang, S.; Shen, C.; Zhang, H.; Bianconi, G. Non-Markovian majority-vote model. Phys. Rev. E 2020, 102, 062311. [Google Scholar] [CrossRef] [PubMed]
- Neshov, N.N.; Tonchev, K.; Velchev, Y.; Manolova, A.; Poulkov, V. SoftVotingSleepNet: Majority Vote of Deep Learning Models for Sleep Stage Classification from Raw Single EEG Channel; IEEE: Piscataway, NJ, USA, 2022; pp. 298–302. [Google Scholar] [CrossRef]
- Deffuant, G.; Neau, D.; Amblard, F.; Weisbuch, G. Mixing beliefs among interacting agents. Adv. Complex Syst. 2000, 3, 11. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Hong, Y. Opinion evolution analysis for short-range and long-range Deffuant–Weisbuch models. Phys. Stat. Mech. Appl. 2013, 392, 5289–5297. [Google Scholar] [CrossRef]
- Luo, Y.; Li, Y.; Sun, C.; Cheng, C. Adapted Deffuant–Weisbuch model with implicit and explicit opinions. Phys. Stat. Mech. Appl. 2022, 596, 127095. [Google Scholar] [CrossRef]
- Chen, G.; Su, W.; Mei, W.; Bullo, F. Convergence properties of the heterogeneous Deffuant-Weisbuch model. Automatica 2020, 114, 108825. [Google Scholar] [CrossRef] [Green Version]
- Hegselmann, R.; Krause, U. Opinion dynamics and bounded confidence: Models, analysis and simulation. J. Artif. Soc. Soc. Simul. 2002, 5, 1–33. [Google Scholar]
- Xu, H.; Cai, H.; Wu, S.; Ai, K.; Xu, M. HKML: A Novel Opinion Dynamics Hegselmann-Krause Model with Media Literacy. In Proceedings of the 2020 IEEE International Conference on Systems, Man, and Cybernetics, SMC 2020, Toronto, ON, Canada, 11–14 October 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 52–57. [Google Scholar] [CrossRef]
- Cheng, C.; Yu, C. Social conformity creates consensus and strong diversity of Hegselmann-Krause opinion dynamics. Sci. China Inf. Sci. 2022, 65, 129202:1–129202:3. [Google Scholar] [CrossRef]
- Zhao, Y.; Xu, M.; Dong, Y.; Peng, Y. Fuzzy inference based Hegselmann-Krause opinion dynamics for group decision-making under ambiguity. Inf. Process. Manag. 2021, 58, 102671. [Google Scholar] [CrossRef]
- Atas, F.; Demirci, A.; Özemir, C. Bifurcation analysis of Friedkin-Johnsen and Hegselmann-Krause models with a nonlinear interaction potential. Math. Comput. Simul. 2021, 185, 676–686. [Google Scholar] [CrossRef]
- Li, K.A.; Liang, H.A.; Kou, G.B.; Dong, Y.A. Opinion dynamics model based on the cognitive dissonance: An agent-based simulation. Inf. Fusion 2020, 56, 1–14. [Google Scholar] [CrossRef]
- Baccelli, F.; Chatterjee, A.; Vishwanath, S. Pairwise stochastic bounded confidence opinion dynamics: Heavy tails and stability. In Proceedings of the IEEE INFOCOM 2015—IEEE Conference on Computer Communications, Hong Kong, China, 26 April–1 May 2015. [Google Scholar] [CrossRef]
- Dong, Q.; Zhou, X.; Martínez-López, L. A hybrid group decision making framework for achieving agreed solutions based on stable opinions. Inf. Sci. 2019, 490, 227–243. [Google Scholar] [CrossRef]
- Roy, S.; Biswas, S. Opinion dynamics: Public and private. Philos. Trans. R. Soc. Math. Phys. Eng. Sci. 2022, 380, 20210169. [Google Scholar] [CrossRef]
- Abramiuk-Szurlej, A.; Lipiecki, A.; Pawłowski, J.; Sznajd-Weron, K. Discontinuous phase transitions in the q-voter model with generalized anticonformity on random graphs. Sci. Rep. 2021, 11, 17719. [Google Scholar] [CrossRef]
- Lallouache, M.; Chakrabarti, A.S.; Chakraborti, A.; Chakrabarti, B.K. Opinion formation in kinetic exchange models: Spontaneous symmetry-breaking transition. Phys. Rev. E 2010, 82, 056112. [Google Scholar] [CrossRef] [Green Version]
- Scheufele, D.A.; Eveland, W.P., Jr. Perceptions of ‘Public Opinion’ and ‘Public’ Opinion Expression. Int. J. Public Opin. Res. 2001, 13, 25–44. [Google Scholar] [CrossRef]
- Liang, H.; Li, C.; Dong, Y.; Jiang, Y. The fusion process of interval opinions based on the dynamic bounded confidence. Inf. Fusion 2016, 29, 112–119. [Google Scholar] [CrossRef] [Green Version]
- Dinkelberg, A.; O’Sullivan, D.J.P.; Quayle, M.; MacCarron, P. Detecting Opinion-based Groups and polarization in Survey-based attitude Networks and estimating Question Relevance. Adv. Complex Syst. 2021, 24, 2150006:1–2150006:37. [Google Scholar] [CrossRef]
- Gaitonde, J.; Kleinberg, J.M.; Tardos, É. Polarization in Geometric Opinion Dynamics. In Proceedings of the EC ‘21: 22nd ACM Conference on Economics and Computation, Budapest, Hungary, 18–23 July 2021; ACM: New York, NY, USA, 2021; pp. 499–519. [Google Scholar] [CrossRef]
- Biondi, E.; Boldrini, C.; Passarella, A.; Conti, M. Dynamics of opinion polarization. arXiv 2022, arXiv:2206.06134. [Google Scholar] [CrossRef]
- Wu, T.; Zuheros, C.; Liu, X.; Herrera, F. Managing minority opinions in large-scale group decision making based on community detection and group polarization. Comput. Ind. Eng. 2022, 170, 108337. [Google Scholar] [CrossRef]
- Zafeiris, A. Opinion Polarization in Human Communities Can Emerge as a Natural Consequence of Beliefs Being Interrelated. Entropy 2022, 24, 1320. [Google Scholar] [CrossRef] [PubMed]
- Dai, J.; Zhu, J.; Wang, G. Opinion influence maximization problem in online social networks based on group polarization effect. Inf. Sci. 2022, 609, 195–214. [Google Scholar] [CrossRef]
- Ye, Y.; Zhang, R.; Zhao, Y.; Yu, Y.; Du, W.; Chen, T. A Novel Public Opinion Polarization Model Based on BA Network. Systems 2022, 10, 46. [Google Scholar] [CrossRef]
- Ernst, E.; Resch, K. The Barnum effect in complementary medicine. Complement. Ther. Med. 1995, 3, 134–137. [Google Scholar] [CrossRef]













Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, B.; Yu, Q.; Fan, Y. A Hybrid Opinion Formation and Polarization Model. Entropy 2022, 24, 1692. https://doi.org/10.3390/e24111692
Yang B, Yu Q, Fan Y. A Hybrid Opinion Formation and Polarization Model. Entropy. 2022; 24(11):1692. https://doi.org/10.3390/e24111692
Chicago/Turabian StyleYang, Baizhong, Quan Yu, and Yi Fan. 2022. "A Hybrid Opinion Formation and Polarization Model" Entropy 24, no. 11: 1692. https://doi.org/10.3390/e24111692
APA StyleYang, B., Yu, Q., & Fan, Y. (2022). A Hybrid Opinion Formation and Polarization Model. Entropy, 24(11), 1692. https://doi.org/10.3390/e24111692