
A Uzawa-Type Iterative Algorithm for the Stationary Natural Convection Model


Abstract
:1. Introduction
2. Preliminaries
3. A Uzawa-Type Iterative Algorithm
| Algorithm 1: Uzawa iterative algorithm [19]. |
|
| Algorithm 2: Uzawa-type iterative algorithm. |
|
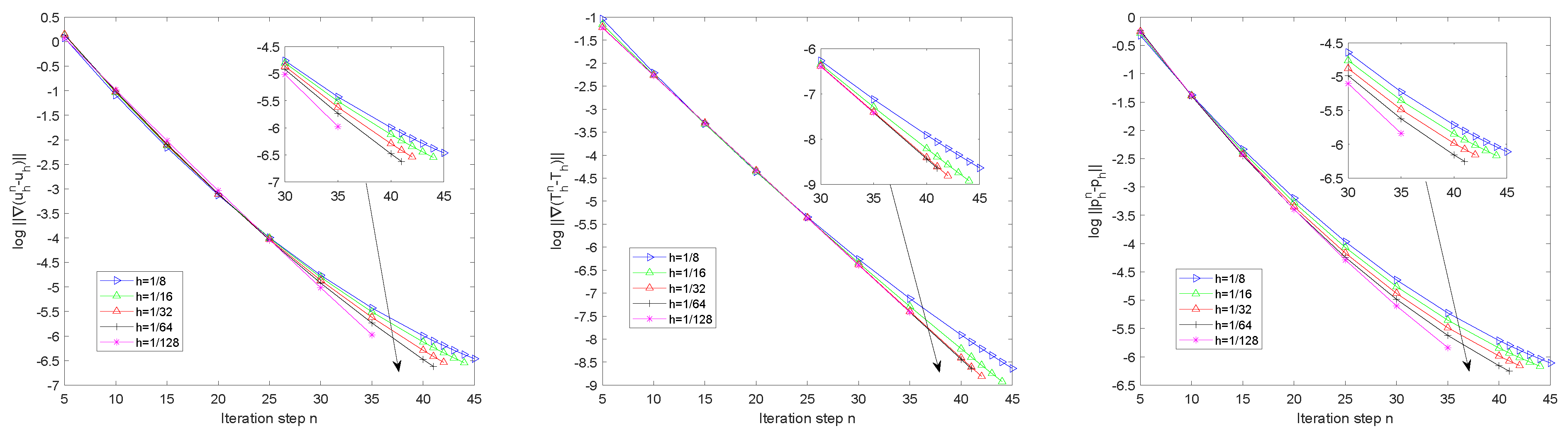
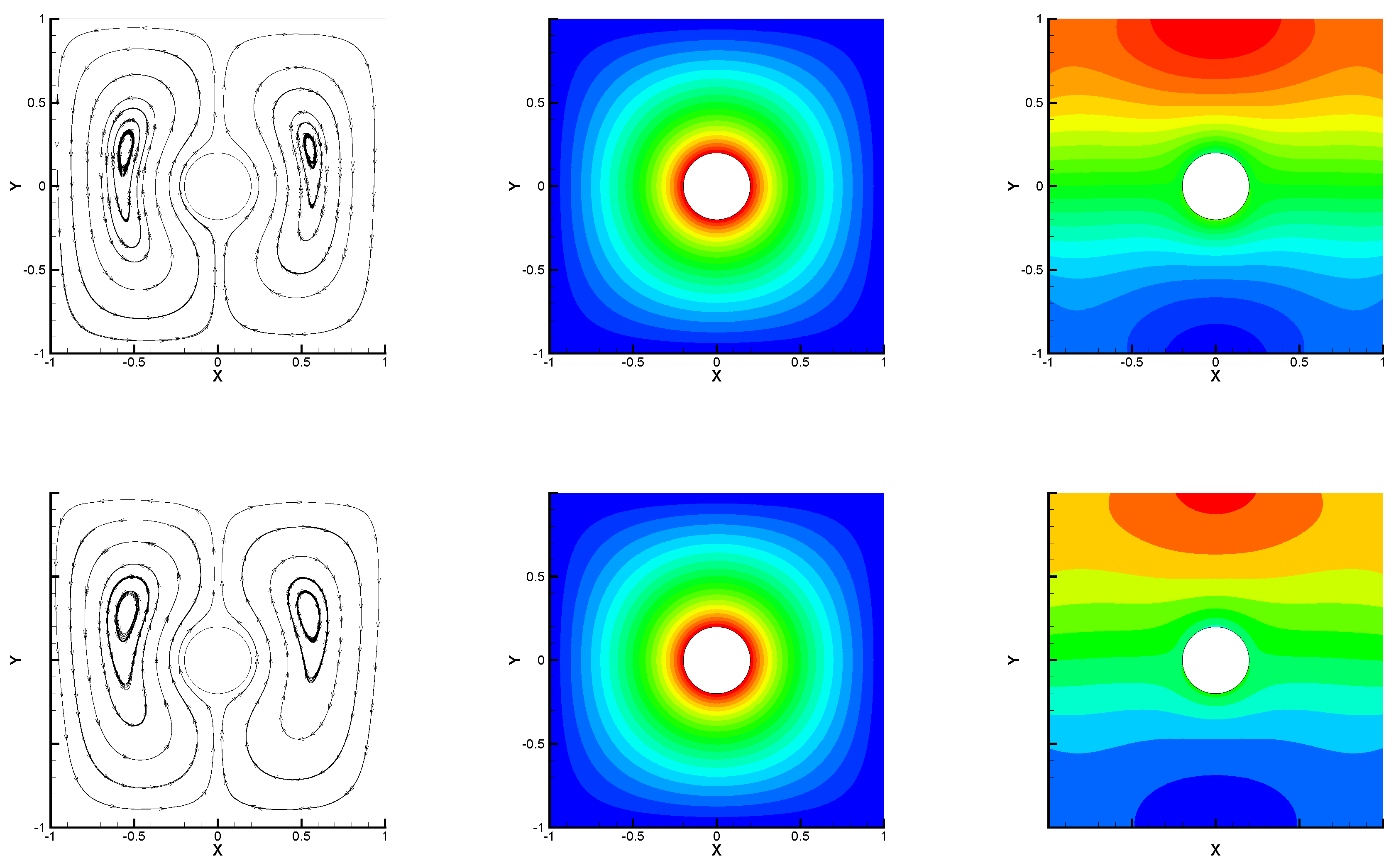
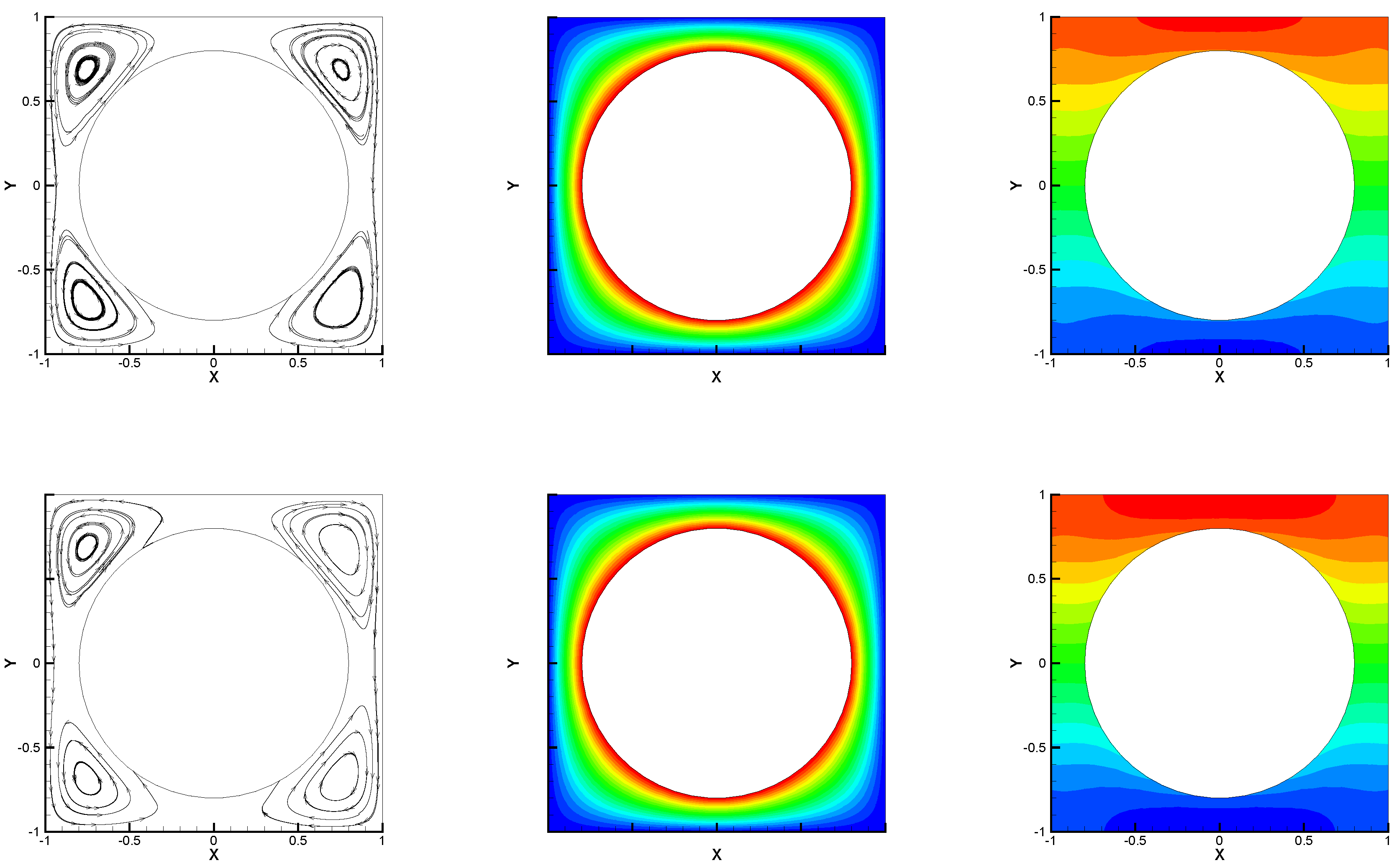
4. Numerical Study
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Estellé, P.; Mahian, O.; Mare, T.; Öztop, H.F. Natural convection of CNT water-based nanofluids in a differentially heated square cavity. J. Therm. Anal. Calorim. 2017, 128, 1765–1770. [Google Scholar] [CrossRef]
- Öztop, H.F.; Almeshaal, M.A.; Kolsi, L.; Rashidi, M.M.; Ali, M.E. Natural convection and irreversibility evaluation in a cubic cavity with partial opening in both top and bottom sides. Entropy 2019, 21, 116. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Selimefendigil, F.; Öztop, H.F.; Abu-Hamdeh, N. Natural convection and entropy generation in nanofluid filled entrapped trapezoidal cavities under the influence of magnetic field. Entropy 2016, 18, 43. [Google Scholar] [CrossRef] [Green Version]
- Öztop, H.F.; Estellé, P.; Yan, W.M.; Al-Salem, K.; Orfi, J.; Mahian, O. A brief review of natural convection in enclosures under localized heating with and without nanofluids. Int. Commun. Heat Mass Transf. 2015, 60, 37–44. [Google Scholar] [CrossRef]
- Allendes, A.; Barrenechea, G.R.; Naranjo, C. A divergence-free low-order stabilized finite element method for a generalized steady state Boussinesq problem. Comput. Methods Appl. Mech. Eng. 2018, 340, 90–120. [Google Scholar] [CrossRef] [Green Version]
- Boland, J.; Layton, W. An analysis of the finite element method for natural convection problems. Numer. Methods Partial. Differ. Equ. 1990, 2, 115–126. [Google Scholar] [CrossRef]
- Boland, J.; Layton, W. Error analysis for finite element methods for steady natural convection problems. Numer. Funct. Anal. Optim. 1990, 11, 449–483. [Google Scholar] [CrossRef]
- Chacón-Rebollo, T.; Gxoxmez-Mármol, M.; Hecht, F.; Rubino, S.; Sxaxnchez-Mu noz, I. A high-order local projection stabilization method for natural convection problems. J. Sci. Comput. 2018, 74, 667–692. [Google Scholar] [CrossRef]
- Huang, P.Z.; Li, W.; Si, Z. Several iterative schemes for the stationary natural convection equations at different Rayleigh numbers. Numer. Methods Partial. Differ. Equ. 2015, 31, 761–776. [Google Scholar] [CrossRef]
- Huang, P.Z.; Zhang, T.; Si, Z.Y. A stabilized Oseen iterative finite element method for stationary conduction-convection equations. Math. Methods Appl. Sci. 2012, 35, 103–118. [Google Scholar] [CrossRef]
- Arrow, K.; Hurwicz, L.; Uzawa, H. Studies in Nonlinear Programming; Standford University Press: Standford, CA, USA, 1958. [Google Scholar]
- Bänsch, E.; Morint, P.; Nochetto, R.H. An adaptive Uzawa FEM for the Stokes problem: Convergence without the Inf-Sup condition. SIAM J. Numer. Anal. 2003, 40, 1207–1229. [Google Scholar] [CrossRef] [Green Version]
- Huang, P.Z. Convergence of the Uzawa method for the Stokes equations with damping. Complex Var. Elliptic Equ. 2017, 62, 876–886. [Google Scholar] [CrossRef]
- Huang, P.Z.; He, Y.N.; Li, T. A finite element algorithm for nematic liquid crystal flow based on the gauge-Uzawa method. J. Comput. Math. 2022, 40, 26–43. [Google Scholar] [CrossRef]
- Kim, S.D. Uzawa algorithms for coupled Stokes equations from the optimal control problem. Calcolo 2009, 46, 37–47. [Google Scholar] [CrossRef]
- Li, X.Z.; Huang, P.Z. A sensitivity study of relaxation parameter in Uzawa algorithm for the steady natural convection model. Int. J. Numer. Methods Heat Fluid Flow 2020, 30, 818–833. [Google Scholar] [CrossRef]
- Chen, P.; Huang, J.; Sheng, H. Some Uzawa methods for steady incompressible Navier–Stokes equations discretized by mixed element methods. J. Comput. Appl. Math. 2015, 273, 313–325. [Google Scholar] [CrossRef]
- Zhu, T.L.; Su, H.Y.; Feng, X.L. Some Uzawa-type finite element iterative methods for the steady incompressible magnetohydrodynamic equations. Appl. Math. Comput. 2017, 302, 34–47. [Google Scholar] [CrossRef]
- Li, X.Z.; Huang, P.Z. An Uzawa iterative method for the natural convection problem based on mixed finite element method. Math. Methods Appl. Sci. 2021, 44, 13326–13343. [Google Scholar] [CrossRef]
- Huang, P.Z.; He, Y.N. An Uzawa-type algorithm for the coupled Stokes equations. Appl. Math. Mech. 2020, 41, 1095–1104. [Google Scholar] [CrossRef]
- Brenner, S.C.; Scott, L.R. The Mathematical Theory of Finite Element Methods; Springer: New York, NY, USA, 2008; Volume 15. [Google Scholar]
- Huang, P.Z.; Feng, X.L.; Su, H.Y. Two-level defect-correction locally stabilized finite element method for the steady Navier-Stokes equations. Nonlinear Anal. Real World Appl. 2013, 14, 1171–1181. [Google Scholar] [CrossRef]
- Zhang, T.; Zhao, X.; Huang, P. Decoupled two level finite element methods for the steady natural convection problem. Numer. Algorithms 2015, 68, 837–866. [Google Scholar] [CrossRef]
- Nochetto, R.H.; Pyo, J.H. Optimal relaxation parameter for the Uzawa method. Numer. Math. 2004, 98, 695–702. [Google Scholar] [CrossRef]
- Çıbık, A.; Kaya, S. A projection-based stabilized finite element method for steady-state natural convection problem. J. Math. Anal. Appl. 2011, 381, 469–484. [Google Scholar] [CrossRef] [Green Version]
- Nochetto, R.H.; Pyo, J.H. Error estimates for semi-discrete Gauge methods for the Navier-Stokes equations. Math. Comput. 2005, 74, 521–542. [Google Scholar] [CrossRef] [Green Version]
- Dalal, D.; Hecht, F.; Pironneau, O. Implementation of a low order mimetic elements in freefem++. J. Numer. Math. 2012, 20, 183–194. [Google Scholar] [CrossRef]
- Sheikholeslami, M.; Shehzad, S.A. Magnetohydrodynamic nanofluid convection in a porous enclosure considering heat flux boundary condition. Int. J. Heat Mass Transf. 2017, 106, 1261–1269. [Google Scholar] [CrossRef]
- Wang, L.; Li, J.; Huang, P.Z. An efficient algorithm for the natural convection equations based on finite element method. Int. J. Numer. Methods Heat Fluid Flow 2018, 28, 584–605. [Google Scholar] [CrossRef]
- Wei, Y.X.; Huang, P.Z. Finite element iterative methods for the stationary double-diffusive natural convection model. Entropy 2022, 24, 236. [Google Scholar] [CrossRef]
- Su, H.Y.; Feng, X.L.; Huang, P.Z. Iterative methods in penalty finite element discretization for the steady MHD equations. Comput. Methods Appl. Mech. Eng. 2016, 304, 521–545. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 0.1 | 0.2 | 0.3 | 0.4 | 0.5 | 0.6 | 0.7 | 0.8 | 0.9 | 1.0 | 1.1 | 1.2 | 1.3 | 1.4 | 1.5 | 1.6 | 1.7 | 1.8 | 1.9 | 2.0 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Algorithm 1 | 509 | 280 | 197 | 153 | 126 | 107 | 93 | 83 | 74 | 67 | 62 | 57 | 53 | 50 | 47 | 44 | 49 | 76 | 159 | / |
| Algorithm 2 | 531 | 289 | 202 | 156 | 127 | 108 | 94 | 83 | 74 | 67 | 61 | 56 | 52 | 44 | 48 | 42 | 50 | 77 | 154 | / |
| 10 | 100 | 150 | 180 | |
|---|---|---|---|---|
| Algorithm 2 | 1.82 × 10 | 2.65 × 10 | 2.02 × 10 | 4.96 × 10 |
| Algorithm 1 | 3.50 × 10 | / | / | / |
| Ra = 100 | Ra = 250 | |||||
|---|---|---|---|---|---|---|
| x = 0.5 | y = 0.5 | CPU Time | x = 0.5 | y = 0.5 | CPU Time | |
| Algorithm 2 | 0.281 | 0.284 | 14.135 | 0.755 | 0.760 | 22.135 |
| Algorithm 1 [19] | 0.263 | 0.465 | 33.772 | / | / | / |
| Wang’s algorithm [29] | 0.274 | 0.279 | 51.890 | 0.714 | 0.722 | 56.571 |
| Ra = 100 | Ra = 250 | |||||
|---|---|---|---|---|---|---|
| x = 0.5 | y = 0.5 | CPU Time | x = 0.5 | y = 0.5 | CPU Time | |
| Algorithm 2 | 0.039 | 0.085 | 1.811 | 0.098 | 0.213 | 2.191 |
| Algorithm 1 [19] | 0.039 | 0.085 | 2.077 | / | / | / |
| Wang’s algorithm [29] | 0.039 | 0.086 | 8.851 | 0.098 | 0.214 | 9.169 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Keram, A.; Huang, P. A Uzawa-Type Iterative Algorithm for the Stationary Natural Convection Model. Entropy 2022, 24, 543. https://doi.org/10.3390/e24040543
Keram A, Huang P. A Uzawa-Type Iterative Algorithm for the Stationary Natural Convection Model. Entropy. 2022; 24(4):543. https://doi.org/10.3390/e24040543
Chicago/Turabian StyleKeram, Aytura, and Pengzhan Huang. 2022. "A Uzawa-Type Iterative Algorithm for the Stationary Natural Convection Model" Entropy 24, no. 4: 543. https://doi.org/10.3390/e24040543
APA StyleKeram, A., & Huang, P. (2022). A Uzawa-Type Iterative Algorithm for the Stationary Natural Convection Model. Entropy, 24(4), 543. https://doi.org/10.3390/e24040543