1. Background and Motivations
With the fast development of computing and communication technologies, and emerging data-driven applications, e.g., IoT (Internet of Things), social network analysis, smart grids and vehicular networks, the volume of data for various intelligent systems with machine learning has increased explosively along with the number of involved computing nodes [
1], i.e., in a large scale. For instance, learning systems based on MAPReduce [
2] have been widely used and may often reach the data volume of petabytes (10
bytes), which may be produced and stored in thousands of separated nodes [
3,
4]. Large-scale machine learning is pervasive in our societies and industries. Meanwhile, it is inefficient (sometimes even infeasible) to transmit all data to a central node for analysis. For the reason, distributed machine learning (DML), which stores and processes all or parts of data in different nodes, has attracted significant research interests and applications [
1,
3,
4,
5,
6,
7,
8,
9,
10,
11,
12,
13,
14,
15,
16]. There are different methods of implementing DML, i.e., primal method (e.g., distributed gradient descend [
4,
7], federated learning [
5,
6]) and primal–dual method (e.g., alternating direction method of multipliers (ADMM)) [
16]. In a DML system, participating nodes (i.e., agents or workers) normally process local data and send the learning model information to other nodes for consensus. For instance, in a typical federated learning system [
5,
6], worker nodes run multiple rounds of gradient descends (local epoch) with local data and received global models. Then, the updated local models are sent to the server for aggregating into new global models (normally weighted sum). The models are normally much shorter than raw data. Thus, significant communication costs are saved by federated learning, and meanwhile the transmission of models in general has better privacy than sending raw data over networks. Actually, in addition to federated learning, other DML also has the benefits of communication efficiency and improved privacy since model information has, in general, smaller volumes and better privacy than raw data.
Despite various benefits, there are severe challenges for the implementation of DML, especially for large-scale DML. Ideally, DML algorithms have speedup gains, which should scale linearly with the number of participating learning machines (computing nodes). However, the practical speedup gain of DML is limited by various bottlenecks, and is still far from the theoretical upper limits [
17,
18]. Among others, significant bottlenecks include communication loads, security, global convergence, synchronization, slow computing nodes, complex optimization functions, etc. For instance, due to the limitation of computing capability and communication networks, a part of the computing nodes may have slow response and become the bottleneck of DML systems if the fast-response nodes have to wait for them. These nodes are often referred to as straggler nodes [
4], and also called system noise [
19]. To efficiently combat the straggler nodes, many schemes have been proposed, such as repetition nodes [
20,
21], blacklisting straggler nodes [
22] and error-control codes [
4,
8,
9,
10,
11,
12,
13,
14,
23,
24,
25]. Blacklisting method detects the straggler nodes and will not schedule more tasks to them. Thus, it is a type of
after-event approach. The repetition of computing nodes needs lots of resources and a suitable mechanism to detect straggler nodes and find corresponding repetition nodes. Moreover, it is rather expensive to repeat all computing tasks and related data. More recently, error-control coding was proposed for DML by regarding straggler nodes as erasure, which can be corrected by coded data from non-straggler nodes and are shown to be much more efficient than the schemes based on replication. Error-control coding can correct the loss by straggler nodes of current learning rounds and thus is a type of
current-event approach.
In [
8], more practical computing networks with hierarchical structures were studied. For such networks, hierarchical coding schemes based on multiple MDS codes were proposed to reduce computation time. In [
9], each multiplication matrix was further divided into sub-matrices, and all sub-matrices were encoded by MDS codes (e.g., Reed–Solomon codes). Thus, the computed parts in straggler nodes can be exploited, and the computing time can be further reduced. However, as the number of nodes and sub-matrices increases, the complexity of the MDS codes will increase substantially. In [
25], the deterministic construction of Reed–Solomon codes was proposed for gradient-based DML. The generator matrix of the codes in [
25] is sparse and well balanced, and thus the waiting time is reduced for gradient computation. In [
10], a new entangled polynomial coding scheme was proposed to minimize the recover threshold of master–worker networks with generalized configurations for matrix-multiplication-based DML. In [
26,
27], coding schemes are considered for matrix multiplication in heterogeneous computing networks. However, the complexity of coding in [
26,
27] is still very high for large-scale DML since matrix inversion is used for decoding, and moreover, the coding matrix is pre-fixed and is hard to adapt to varying networks. In [
28], low-complexity decoding was proposed for matrix multiplication for DML. However, the results in [
28] are preliminary and hard to be used for heterogeneous networks, and the communication load is still very high. In [
11], coding schemes based on the Lagrange polynomial are proposed to encode blocks among worker nodes. The proposed codes may achieve optimal tradeoffs among redundancy (against straggler nodes), security (against Byzantine modification) and privacy. However, the coding scheme in [
11] is also based on MDS codes, which may not be flexible and have high complexity for large-scale DML. Furthermore, the existing coding schemes are mostly for matrix multiplication (for distributed gradient descend), i.e., the primal method. Another important class of large-scale DML is based on primal-dual methods, i.e., ADMM [
16], for which codes have seldom been studied. Thus, coding for ADMM based large-scale DML should be developed to combat straggler nodes, reduce communication loads and increase efficiency.
Despite the progress in coding for straggler nodes [
4,
8,
9,
10,
11,
12,
13,
14,
24,
25], the results are still preliminary and there are also various critical challenges for exploiting the advantages of DML, especially for
large-scale learning: (1) Reliability and complexity—though coding has been proposed for addressing the straggler nodes to improve reliability, the existed schemes are mainly for the systems with a limited number of nodes or data. The coded DML schemes based on existing optimal error-control codes (i.e., maximum distance separable: MDS codes) [
4,
24,
25] have very high encoding/decoding complexity when the number of involved nodes or the data volume scales up. Moreover, MDS codes treat every coding node equally and are not optimal for heterogeneous networks (e.g., IoT or mobile networks). (2) Communication loads—with increasing nodes or data volumes, the communication loads will quickly increase for exchanging model updates among learning nodes. Thus, coding schemes efficient in communication loads are critical for large-scale DML. (3) Limited learning functions—most of the existing coding schemes for DML are for gradient descend (primal method), i.e., combining coding with matrix multiplication and/or data shuffling [
4,
8,
9,
10,
11,
12,
13,
14,
24,
25]. Coding for many other important distributed learning functions, e.g., primal–dual optimization functions (also may be non-smooth or non-convex) in ADMM has seldom been explored. Moreover, existing coding for DML often runs in a master–worker structure, which may not be efficient (or even infeasible) for certain applications, e.g., those without master nodes. Thus, coding for fully decentralized DML should be also investigated. By encoding the messages to (or/and from) different destinations/sources in intermediate nodes, network coding shows the benefits of reducing information flow in the networks [
29,
30]. Moreover, it has been shown that network coding can improve the reliability and security of communication networks [
12,
31,
32]. Thus, it is also valuable to discuss the applications of network coding to DML.
In what follows, we first introduce the basics on DML in
Section 2. Then we discuss how error-control coding can help with the straggler problem in
Section 3, the random coding construction in
Section 4, and coding for primal–dual-based DML (ADMM) in
Section 5. Finally, conclusions and discussion for future works are given in
Section 6.
2. Introduction of Distributed Machine Learning
In general, DML will have two steps: (1) Agents learn local models from local data, maybe combining with global models. This step may iterate multiple rounds, i.e., local iterations, to produce a local model. (2) With local models, agents will reach consensus. These two steps may also iterate multiple rounds, i.e., global iterations. There are also different methods to implement the two steps, for instance, the primal and primal–dual methods as mentioned above. There are different ways to achieve consensus, for instance, through a central server, i.e., master–slave method or fully decentralized. For the former, the implementation is relatively straightforward. Yet, for the latter, there are also different approaches as will be discussed later on. For Step (1), the common local learning machine includes, for example, linear (polynomial) regressions, classification and neural networks. The common approach of these learning algorithms is to find the model parameters (e.g., weights in neural networks) that minimize the cost functions (such as mean-squared errors/L2 loss, hinge loss and cross-entropy loss). In general, convex cost functions should be chosen. For instance, for linear regression, we assume
as the input and output of the training data, respectively, and
w (normally a matrix or a vector) as the weight to be optimized. If the mean-squared error cost functions are used, then the learning machine works as
To find the optimal
w, one common approach is to use gradient descend, which is a first-order iterative optimization algorithm for finding a local minimum of a differentiable function. If the cost function is convex, then the local minimum is also the global minimum [
33]. For instance, in the training process of neural networks, gradient descend is commonly used to find the optimized weight and bias iteratively. The gradient is found by partial derivative of cost functions relative to optimizing variables (weight and bias of training examples). For instance, for node
i, the optimizing variables can be updated by
where
t is the iteration step index,
is the step size,
is the data set (training samples) in node
i,
is the cost function with current optimizing variables, and
denotes the gradients for given
(by partial derivatives). The training process is normally performed in batches of data.
can be further divided into subsets, e.g.,
N subsets, i.e.,
. If subsets are exclusive, the gradients from different subsets are independent, i.e.,
. However, in many DML systems, e.g., those based on MAPReduce file systems, or sensor nodes in neighboring areas, there may be overlapping data subsets, i.e.,
for certain
and
. Therefore, there may be identical gradients in different nodes. These properties were recently exploited for coding. It it clear from (
2) that for given gradients, the steps of finding optimal parameters are mainly linear matrix operations (matrix multiplications). Actually, in addition to neural networks, one core operation of many other learning algorithms is also matrix multiplications, such as regression, power-iteration-like algorithms, etc. [
4]. Thus, one of the major coding schemes for DML is based on the matrix multiplication of the learning process [
4,
8,
9,
10,
11,
12,
13,
14,
24,
25]. Clearly, major coding schemes (forward error-control coding and network coding) are linear in terms of encoding and decoding operations, i.e.,
, where
C,
M and
W are codeword (vectors), coding matrix and information message, respectively. Since both learning and coding operations are linear matrix operations, then the coding matrix and learning matrix can be
jointly optimized. On the other hand, coding can be optimized to provide efficient and reliable information pipelines for DML systems. In such way, coding and DML matrices are
separately optimized. Separate optimization actually has been widely studied for many years for existing systems due to the simpler design relative to joint design. There are many works in the literature on the separate optimization of learning systems and coding schemes. We will focus on joint design in this article.
3. Coding for Reliable Large-Scale DML
In this section, we will first give a review on the basic principles of coding for reliable DML. Then, we will discuss two optimal construction of codes for DML.
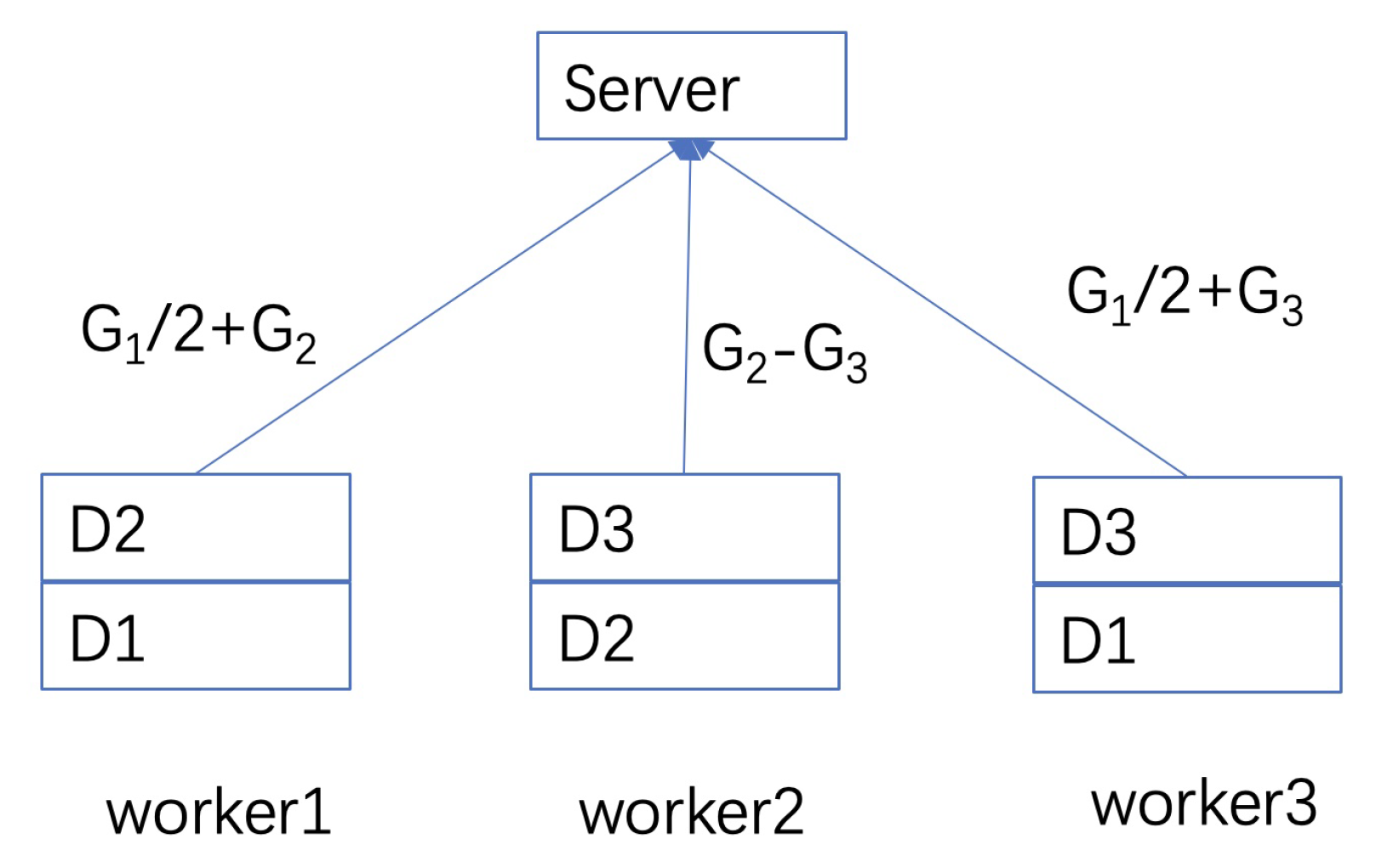
One toy example of how coding can help to deal with stragglers can be found in
Figure 1 [
34]. For instance, it can be a federated learning network with worker and server nodes. There is partial overlapping for data segments in different worker nodes and thus the partial overlapping of gradients. As in
Figure 1, we divide the data set of a node into multiple smaller sets to denote the partial overlapping of different nodes. Meanwhile, multiple sets in a node are also necessary for encoding as shown in the figure since one data set corresponds to one source symbol of the code. In the server node, a weight sum of the gradient is needed. In the figure, three worker nodes have different data parts of
, which are used to compute gradients
, respectively. In the server, an individual gradient is not needed but only their sum
. We can easily see that gradients from
any two nodes can calculate
. For instance, if worker3 is outage, then
with two transmission coded blocks from worker1 and worker2. If there is no coding, then worker1 and worker2 have to transmit
separately with three blocks after the coordination operations. Thus, coding can save the transmission and also coordination loads.
Though the idea of applying coding for DML is straightforward as shown in the above toy example, the code design will be rather challenging for large-scale DML, i.e., when the numbers of nodes and/or gradients per node are very large. One big challenge is how to construct encoding and decoding matrices, especially with limited complexity. In what follows, we will first give a brief introduction of the MAPReduce file systems, which are often used in DML. Then, we will discuss the coding schemes with deterministic construction [
34]. The random construction based on fountain codes is given in the next section, which normally has lower complexity [
13,
14].
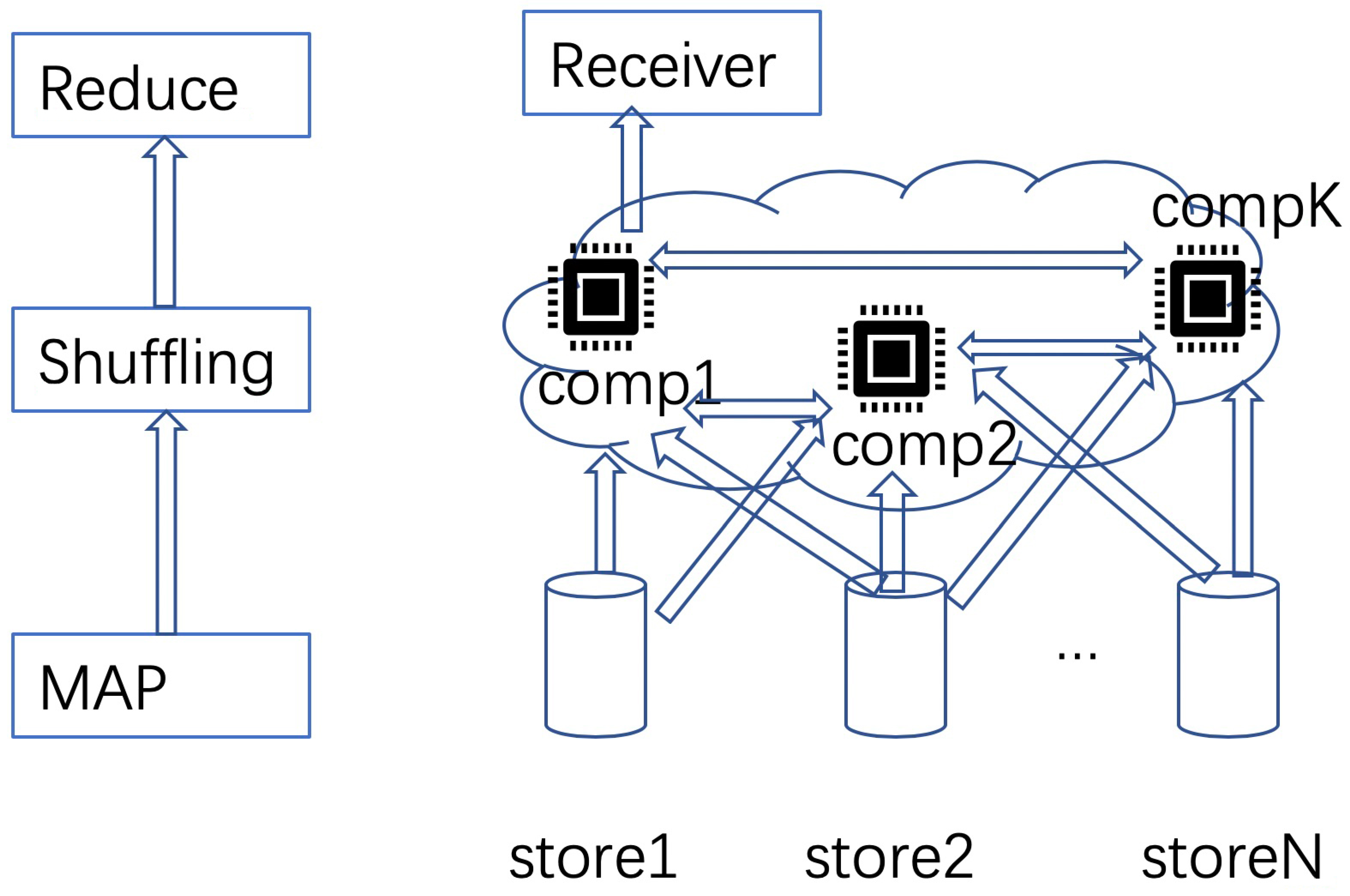
In large DML systems, MAPReduce is a commonly used distributed file storage system. As shown in
Figure 2, there are three stages for the MAPReduce file systems: map, shuffling and reduce. In the system, data are stored in different nodes. In the map stage, stored data are sent to different computing nodes (e.g., cloud computing nodes), according to pre-defined protocols. In the shuffling stage, the computed results (e.g., gradients) are exchanged among nodes. Finally, the end users will collect the computed results in the reduce stage. MAPReduce can be used in federated learning, which was originally proposed for the applications in mobile devices [
5]. In such a scenario, data are first sent to different worker nodes in the map stage, according to certain design principles. Then in the shuffling stage, local model parameters are aggregated in the server node. Finally, the aggregated models are obtained in the final iteration at the server. In such a way, worker nodes have all necessary data for computing local models, sent from storage nodes. However, there may be straggling worker nodes, due to either slow computing at the node or transmission errors in the channels. In such scenario, gradient coding [
34] can be used to correct the straggler nodes.
To construct gradient coding, we use
A to denote the possible straggler pattern multiplied by the corresponding decoding matrix, and
B to denote how different gradients (or model parameters) are combined in the worker node. Thus,
A denotes
transmission matrix multiplied by decoding matrices in some sense (as they recover transmitting gradients from received coded symbols) and
B can also be regarded as an
encoding matrix. Assuming that
k is the number of different gradients (data partitions) in all nodes and there are a total of
n output channels in all nodes, the dimension of
B is
. Denoting
as the vector of all gradients, then worker node
i transmits
, where
is the
i-th row of
B and the encoding vector at node
i. The dimension of
A is
. A row of
A corresponds to an instance of straggling patterns, in which 0 means a straggler node and how the gradients are reproduced in the server. Thus, all rows in
A denote all possible ways of straggling. Denoting
f as the number of surviving workers (none-stragglers), there are at most
0s in each row of
A. In the example of
Figure 1, we only need the sum of gradients from worker nodes instead of the values of individual gradients. Thus, we have
and each row of
is identically
, where
denotes all 1 matrix. For the example, we can easily see that
Clearly, if we want individual values of
, we should redesign
such that
is an identity matrix. Or if we want the weighted sum of gradients (weights more general than 1),
should be also redesigned. From the description, we can see that the main challenge of designing the gradient coding is to find suitable encoding matrix
B such that it can correct the straggling loss defined by
A. In [
34], two different ways of finding
B and corresponding
A are given, i.e., fractional repetition and cyclic repetition schemes as detailed in the following.
We denote n and s as the number of worker nodes and straggler nodes, respectively, and assume n is a multiple of . Then, fractional repetition construction is described as the following steps.
Divide n workers into groups of size ;
In each group, divide all the data equally and disjointly, assigning partitions to each worker;
All the groups are replicas of each other;
After local computing, every worker transmits the sum of its partial gradient.
By the second step, in a group, the first worker obtains the first
partitions from the map stage and computes the first
gradients, and the second worker obtains the second
partition from the map stage and computes the second
gradient and so on. The encoding of each group of workers can be denoted by a block matrix
with
Here
and
means
matrix of all 1 s and all 0 s (row vector), respectively. Then B is obtained by replicating
copies of
, i.e.,
where
for
. In addition to the encoding matrix
, reference [
34] also gives the algorithms of constructing the corresponding
A matrix as follows.
It was shown in [
34] that by fractional repetition schemes,
from (
5) and
A from Algorithm 1 can correct any
s straggler. It can be more formally stated as the following theorem.
| Algorithm 1 Algorithm to compute A for fractional repetition coding. |
| Input:B = Bfrac; |
| f ← binom(n,s) A ← zeros(f,n) for I ⊆ [n], s.t.∣I∣ = (n − s) do |
| ⌊ a = zeros(1,k) x = ones(1,k)/B(I,:) a(I) = x A = [A;a] |
| output:A s.t. AB = 1f×k; |
Theorem 1. Consider from (5) for a given number of workers n and stragglers . Then, the scheme , with A from Algorithm 1 is robust to any s straggler. Here, we refer the interested readers to [
34] for the proof. In addition to fractional repetition construction, another way of finding the
B matrix is the cyclic repetition scheme, which does not require
n to be a multiple of
. The algorithm to construct the cyclic repetition
B matrix is given as follows.
Actually, the resultant matrix
from Algorithm 2 has the following support (non-zero parts):
where ∗ is the non-zero entries in
, and in each row of
, there are
non-zero entries. The position of non-zero entries is right shifted one step and cycled around until the last row. The construction of
A matrix follows Algorithm 1 also for
. It was shown in [
34] that cyclic repetition schemes can also correct any
s stragglers:
| Algorithm 2 Algorithm to construct . |
| Input:n,s(<n) |
| H = binom(n,s) H = −sum(H(:,1:n−1),2) B = zeros(n) for i = 1:n do |
| ⌊ j = mod(i − 1:s + i − 1, n) + 1 B(i,j) = [1; −H(:,j(2 : s + 1))]\H(:,j(1))] |
| output: with (s + 1) non-zeros in each row. |
Theorem 2. Consider from Algorithm 2, for a given number of workers n and stragglers . Then, the scheme , with A from Algorithm 1 is robust to any s straggler.
Fractional repetition and cyclic repetition schemes provide specific methods of encoding and decoding for master–worker DML for tolerating any
s stragglers. More generally, it was also shown in [
34] the necessary conditions for matrix
B for tolerating any
s stragglers if the following conditions are satisfied.
Condition 1 (B-Span): Consider any scheme robust to any s stragglers, given workers, then every subset is satisfied, where span is the span of vectors.
If A matrix is constructed by Algorithm 1, with Condition 1 is also sufficient.
Corollary 1. If A matrix is constructed by Algorithm 1 and B satisfies Condition 1, can correct any s stragglers.
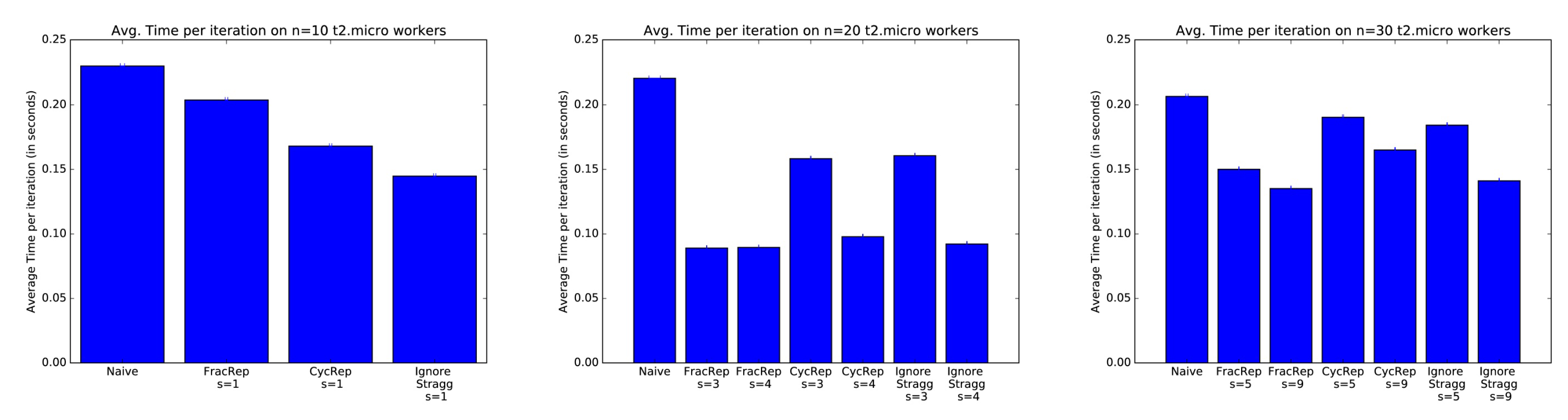
Numerical results: In
Figure 3, the average time per iteration for different schemes is compared from [
34]. In
naive scheme, the data are divided uniformly across all workers without replication, and the master just waits for all workers to send their gradients. In
ignoring the s straggler scheme, the data distribution is the same as the naive scheme. However, the master node only waits until
worker nodes successfully send their gradients (no need to wait for all gradients). Thus, as discussed in [
34], ignoring the straggler scheme may lose in the generalization performance by ignoring a part of data sets of straggler nodes. The running learning algorithms are based on logistic regression. The training data are from the Amazon Employee Access dataset from Kaggle. The delay is introduced by the computing latency of AWS clusters, and there is no transmission error. As shown in the figure, the naive scheme performs the worst. With increasing stragglers, coding schemes also perform better than ignoring straggler schemes as expected.
4. Random Coding Construction for Large-Scale DML
The gradient coding in [
34] works well for the DML scheme with a master–worker structure with limited sizes (finite number of nodes and limited data partitions). However, the deterministic construction of encoding and decoding matrices may be challenging when the number of nodes or data partitions (e.g.,
n or
k) is large. The first challenge is the complexity of encoding and decoding, both of which are based on matrix multiplication, which may be rather complex, especially for decoding (e.g., based on Gaussian elimination). Though DML with MDS codes is optimal in terms of code distance (i.e., the degree of tolerance to the amount of straggler nodes), the coding complexity will be rather high with the increasing number of participating nodes, i.e., for hundreds or even thousands of computing nodes. For instance, Reed–Solomon codes normally need to run in non-binary fields, which are of high complexity. Another challenge is lack of flexibility. Both factional repetition and cyclic repetition coding schemes assume static networks (worker nodes and data). However, in practice, the participating nodes may be varying in mobile nodes or sensors, for example. In the mobile computing scenario, the number of participating nodes may be unknown. It will rather difficult to design deterministic coding matrices (
A or
B) in such a scenario. Similarly, if the data are from sensors, the amount of data may also be varying. Thus, the deterministic construction of coding is hard to adapt to these scenarios, which, however, are very common in large-scale learning networks. Thus, coding schemes efficient in varying networks and of low complexity are preferable for large-scale DML. In [
13,
14], we investigated the random coding for DML (or distributed computing in general) to address the problems. Our coding scheme is based on fountain codes [
35,
36,
37]. The coding scheme is introduced as follows.
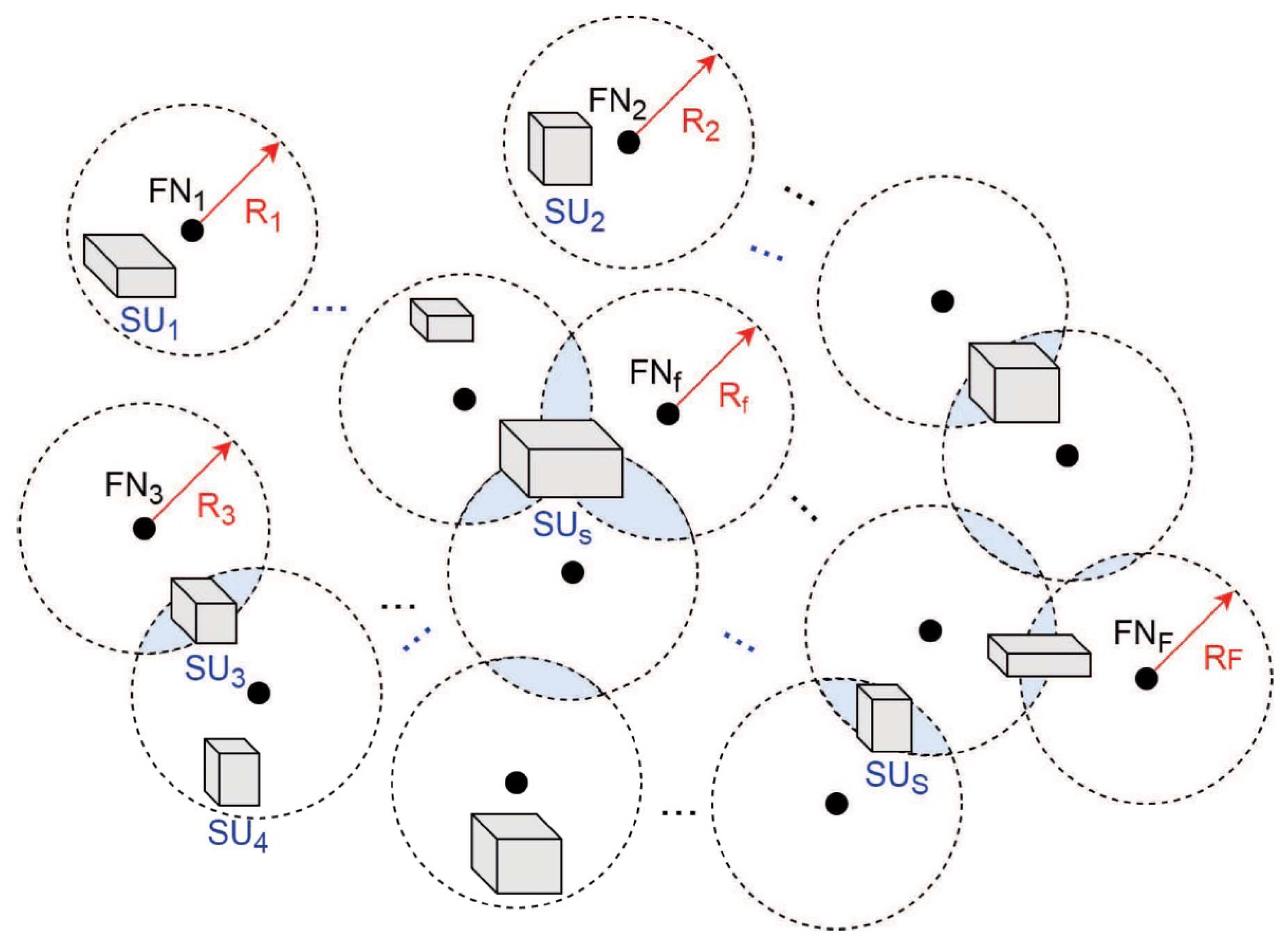
Encoding Phase: As shown in
Figure 4, we consider a network with multiple storage and computing/fog nodes. Let
denote the
f-th fog node and let
denote the
s-th storage unit with
and
, respectively. Let
denote the dataset node
f needed to finish a learning task.
will be obtained from the storage units available to node
f. For instance, in a DML with wireless links as in
Figure 4,
means the data union for all the storage units within the communication range of
(i.e., within
). Similar to federated learning,
will use the current model parameters to calculate gradients, namely, intermediate gradients, denoted as
, where
means the gradient trained by data
and
is the size of
. Meanwhile, fog nodes need to calculate the intermediate model parameters (e.g., weight)
, where
is the length of model parameters learned at
. Then the intermediate gradients and model parameters will be sent out to other fog nodes (or the central sever if there is one) for further processing after encoding. The coding process for
is as follows.
A number is selected according to degree distribution with probability ;
Then, intermediate gradients are selected uniformly at random from to encode into one coded intermediate gradient;
The above two steps repeated until coded intermediate gradients are formed, where is the expanding coefficient of the fountain codes (denoting redundancy).
can be optimized by the probability of straggling (regarded as erasure) due to channel errors, slow computing, etc. The optimization of the degree distribution for distributed fountain codes can be found in, for example, [
38], and we will not discuss it here for space limitation. With the above coding process, the resulted coded intermediate gradients are
where
is the generator matrix at fog node
. The encoding process for
is the same as that of
with a possibly different degree distribution
. The formed
coded intermediate parameters can be written as
, where
is the generator matrix at
for model parameters.
Exchanging Phase: The coded intermediate gradients and model parameters are exchanged among fog nodes. Let M be the total number of all different data in all F nodes, . The equality holds only if F datasets are disjoint.
Decoding Phase: The generator matrices for the received coded intermediate gradients and model parameters from fog node
at
are
with size
and
with size
, respectively, where
and
. Here
denotes the straggling probability from
to
due to various reasons, e.g., physical-layer erasure, slow computing, and congestion. Thus, the generator matrices corresponding to the received coded intermediate gradient and model parameters at
can be written as
and
and
, respectively. Here
is an indicator parameter. Let
be the probability of straggling. Then,
can be evaluated as
Then fog node decodes the received coded intermediate parameters from and , and tried to decode new gradients and model parameters, where is a parameter determined by specific learning algorithms. For the benefits of fountain codes (e.g., LT or Raptor codes), the iterative decoding is feasible if the numbers of received coded gradients or model parameters are slightly larger than those of gradients and models in transmitting fog nodes. Clearly, to optimize the code degree distribution and task allocation, it is critical for a node to know the number of received intermediate gradients and model parameters at the node. For the purpose, we have the following analysis.
Assume
as the overlapping ratio of the dataset in
and
, then for all fog nodes, we have the overlapping ratio as follows:
If , then node and has disjoint datasets. At , intermediate gradients are known. Thus, new intermediate gradients are required for updating model parameters . Then, we have the following result:
Theorem 3. The total number of new intermediate gradients received from the other fog nodes at can be calculated by , where can be written aswhere is a set formed by the indices of fog nodes, and it can be evaluated by If
is known at each fog node (or at least from the transmitted neighbors at each receiving node), then
can be evaluated, and the computation and communication loads can be optimized through proper task assignment and code degree optimization. Theorem 3 is for gradients, and a similar analysis also holds for model parameters. In
Figure 5, we show the coding gains in terms of communication loads, which are defined as the ratio of the total number of data transmitted by all the fog nodes to the data required at these fog nodes. As we can see from the figure, if the number of nodes
F or straggler probability increases, the coding gains increase as expected.
We note that both deterministic codes in
Section 3 and random construction coding here are actually a type of network coding [
29,
30], which can reduce communication loads by computing at intermediate nodes (fog nodes) [
3,
4]. More recently, one type of special network codes, i.e., BATS (batched sparse) codes, was proposed with two layered codes as shown in
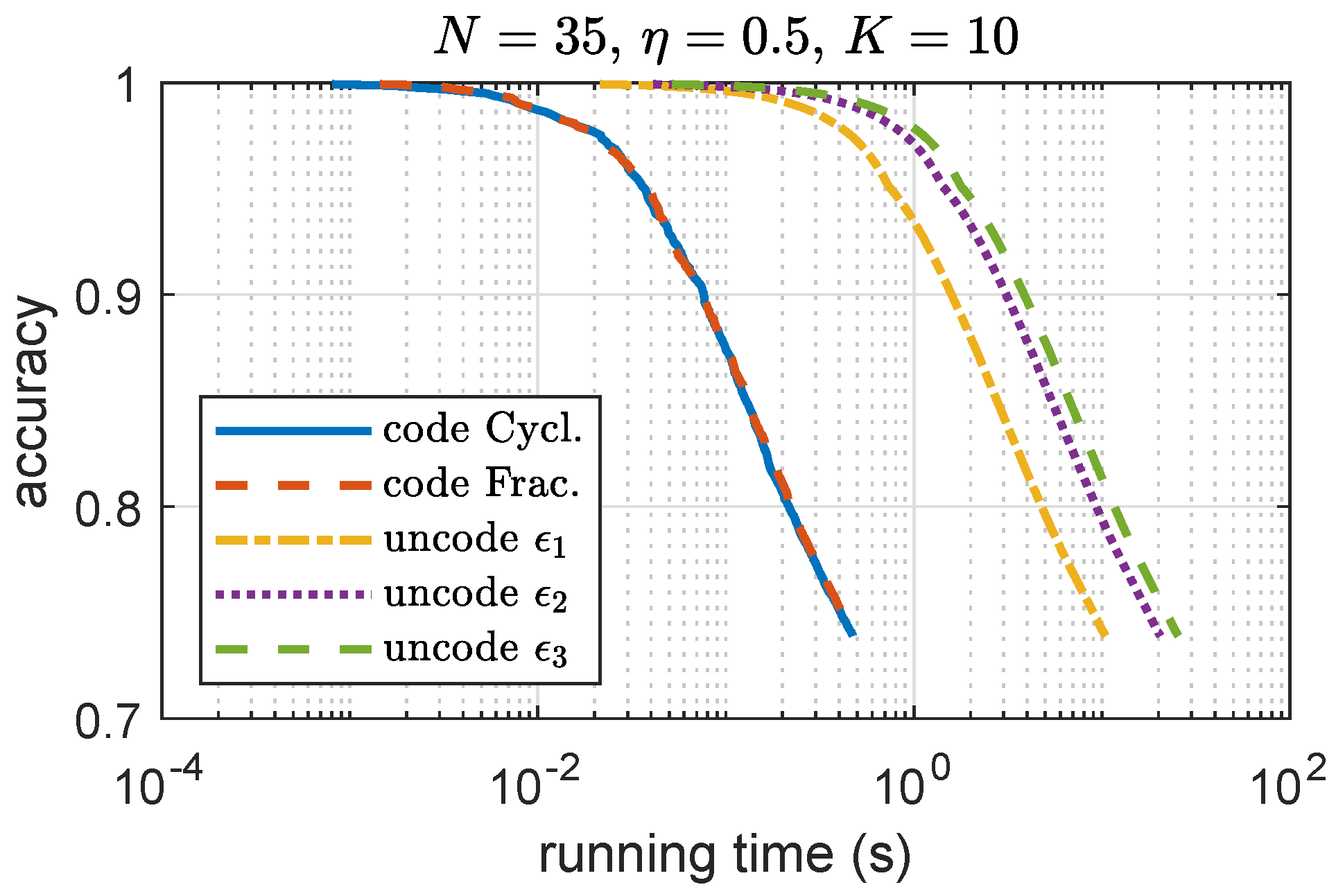
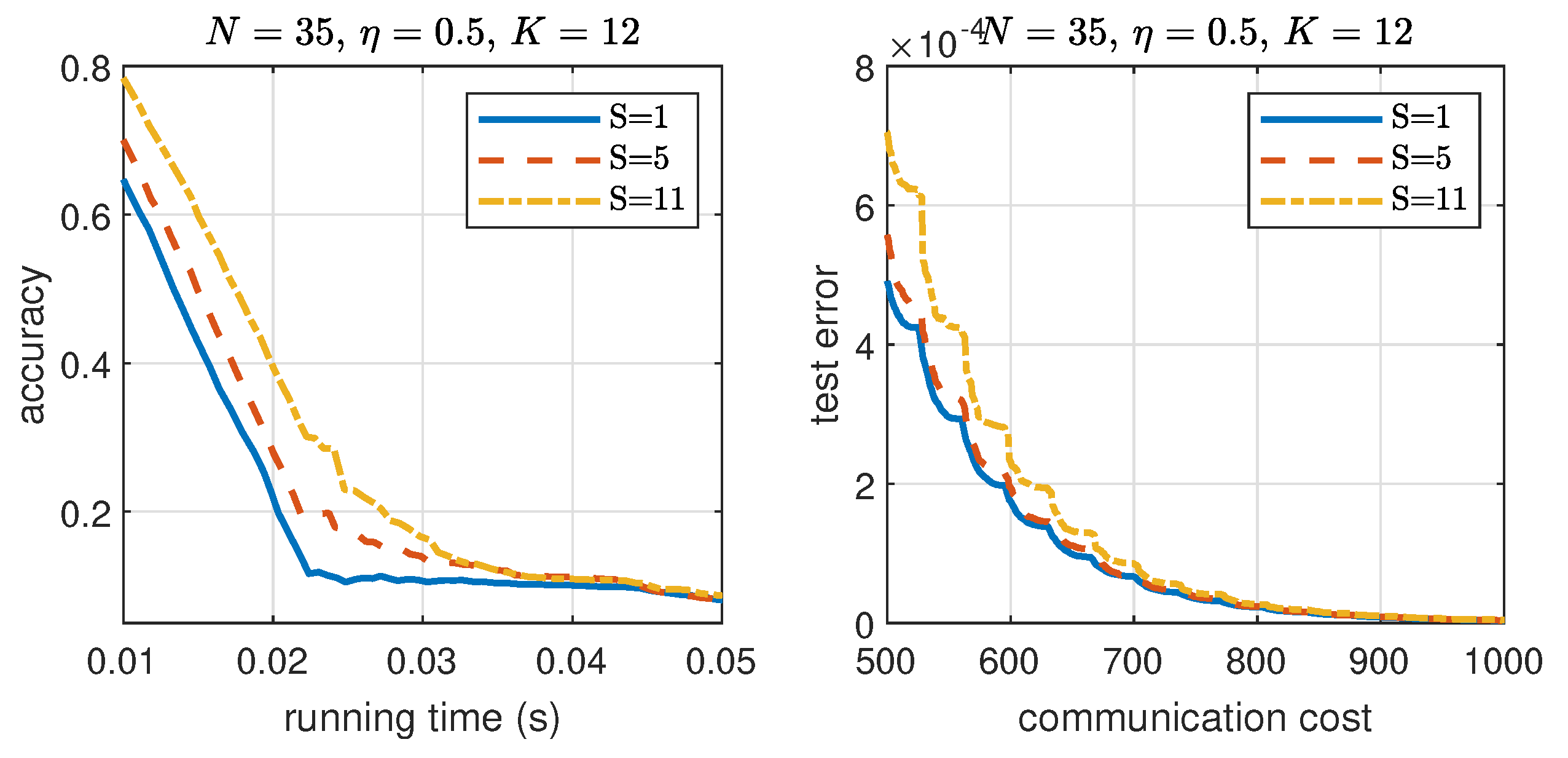
Figure 6. For outer codes, we can use error control codes such as fountain codes in MAP phase. For inner codes, network codes can be used such as random linear network codes in data shuffling stage. In [
12], we studied BATS codes for fog computing networks. As shown in
Figure 7, numerical results demonstrate that the BATS codes can achieve a lower communication load than uncoded and deterministic codes (network codes) if the computing load is lower than certain thresholds. Here, we skip further details and refer interested readers to [
12].




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}









