
Multiple Leader Candidate and Competitive Position Allocation for Robust Formation against Member Robot Faults



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Multiple Robot System Construction


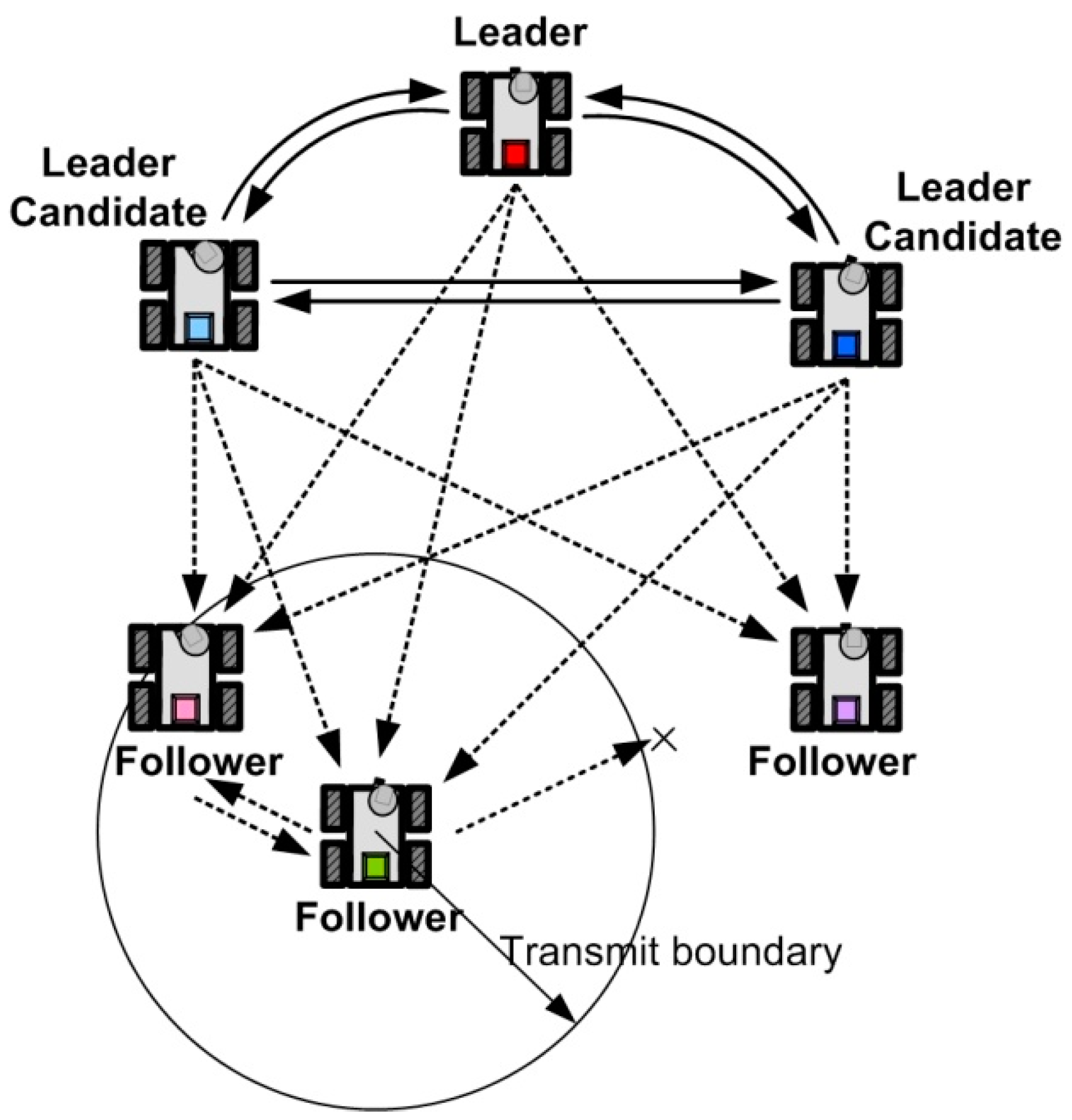
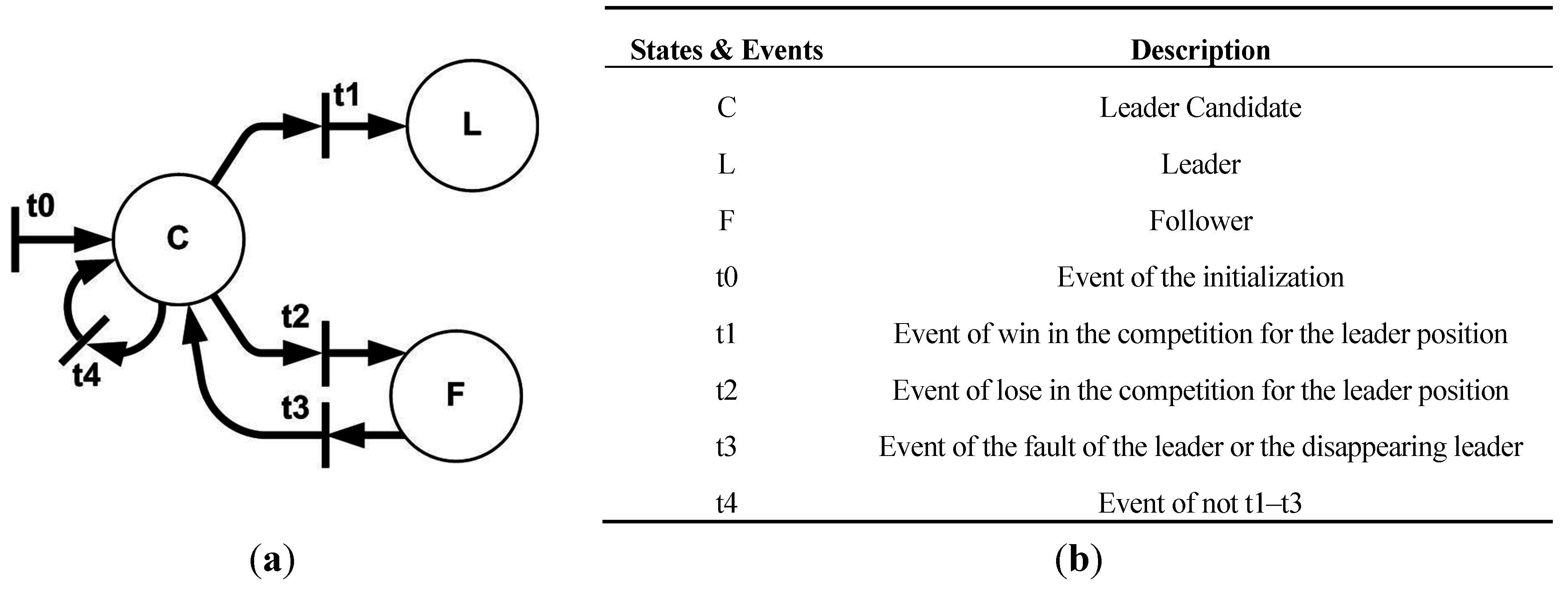
3. Multiple Leader Candidate Structure with Competitive Position Allocation
3.1. Multiple Leader Candidate Structure

3.2. Competitive Position Allocation Algorithm

| Algorithm 1 The competition of the followers for their vertices. |
1. Find the closest goal in goal set.
2. Check that there are other robots in the communication range, which are closer to the selected goal.
3. If there are no closer robots,
then, occupy the selected goal.
4. else if there is any closer robot
then, mark taboo list, T(j) = 1 and return to the process 1 except the marked goal in T.
5. else if there is any robot with same distance
If there is a robot with a smaller ID
Then, mark taboo list, T(j) = 1 and return to the process 1 except the marked goal in T.
else
occupy the selected goal.
6. If the robot does not occupy any goal but all goals in T are marked
then set the T as zero and return to the process 1.
|
4. Results
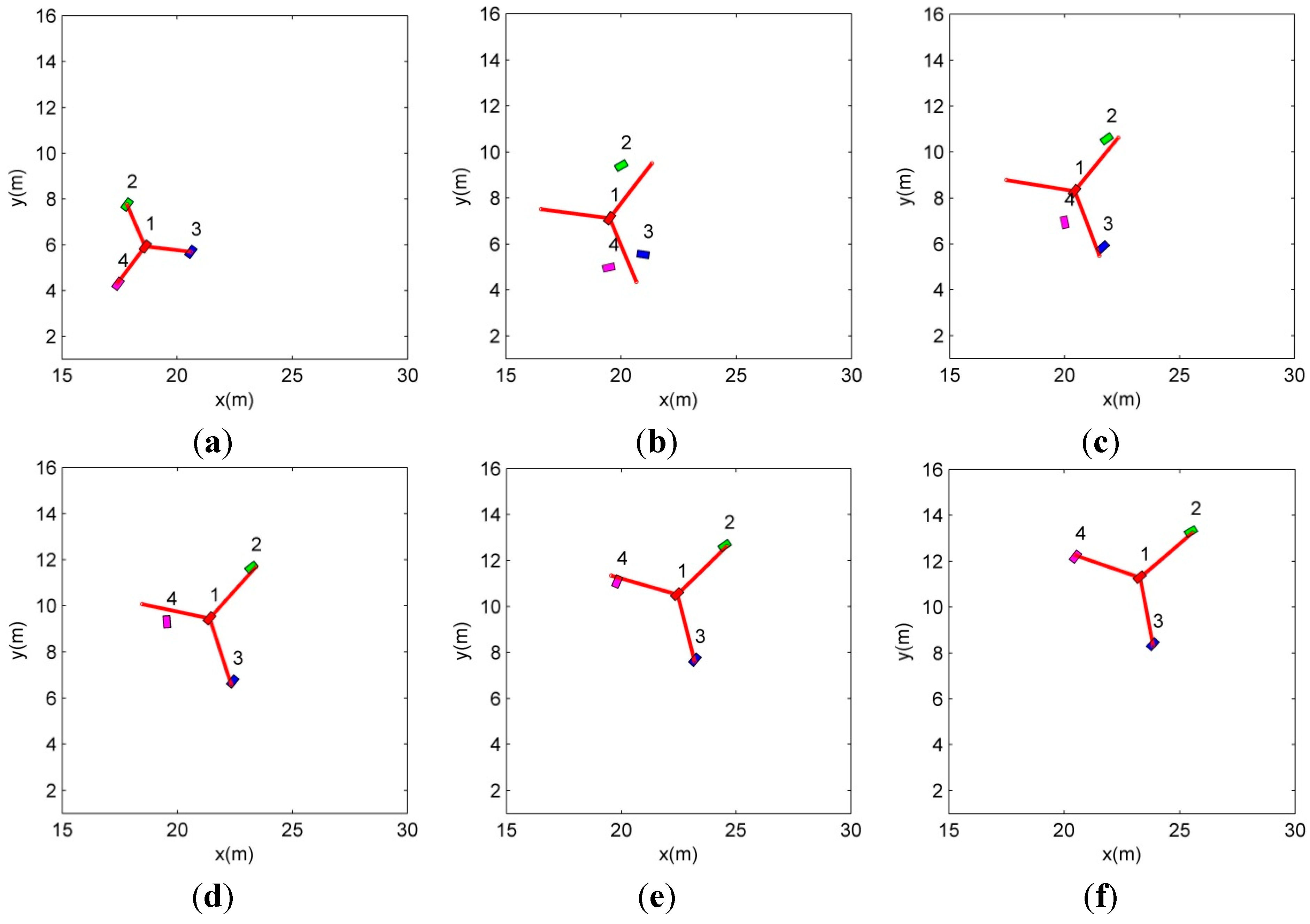
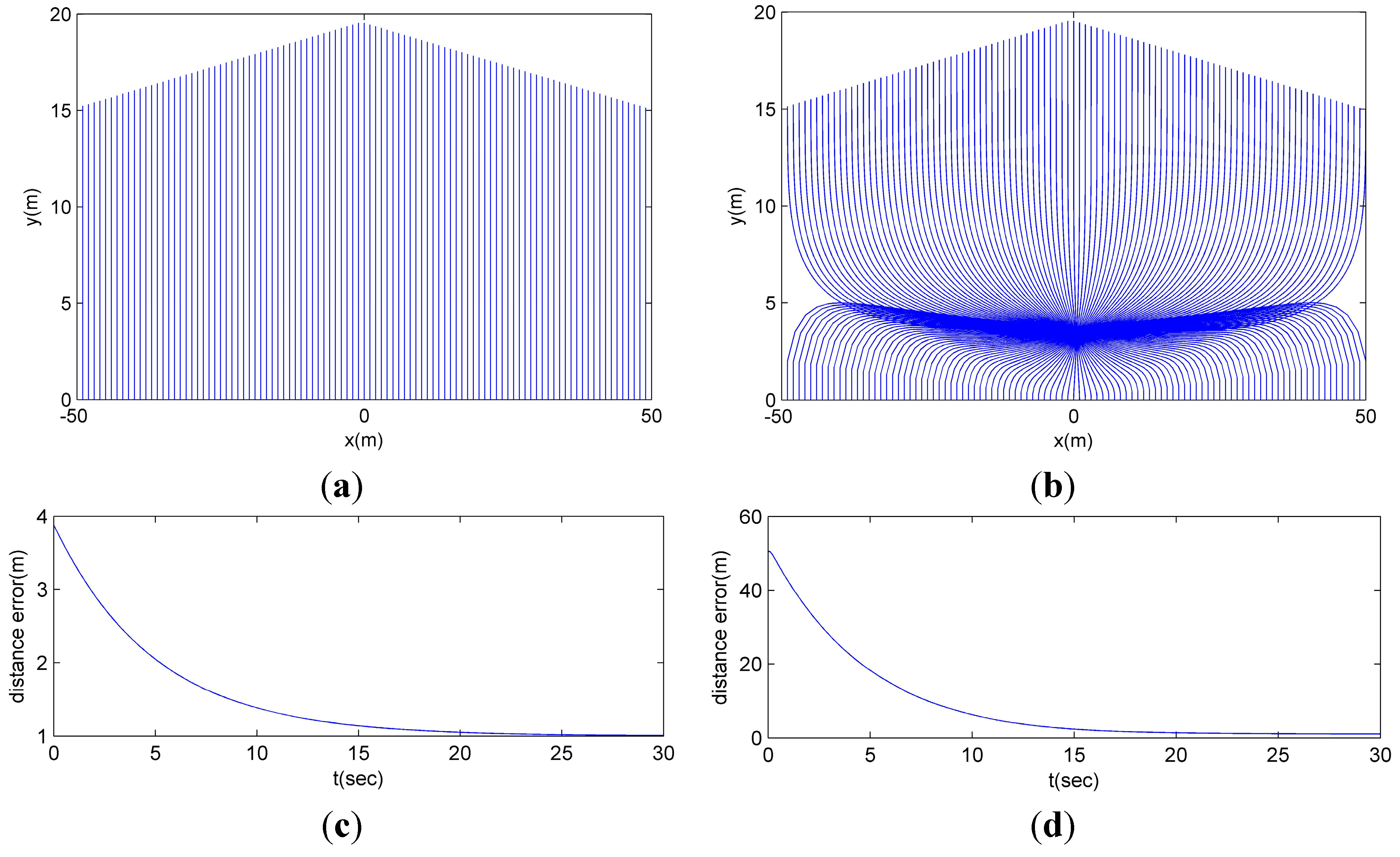
4.1. Simulation Results







L{1.004(i − 50)}, ψ{−37π/70} i = 51,…, 100

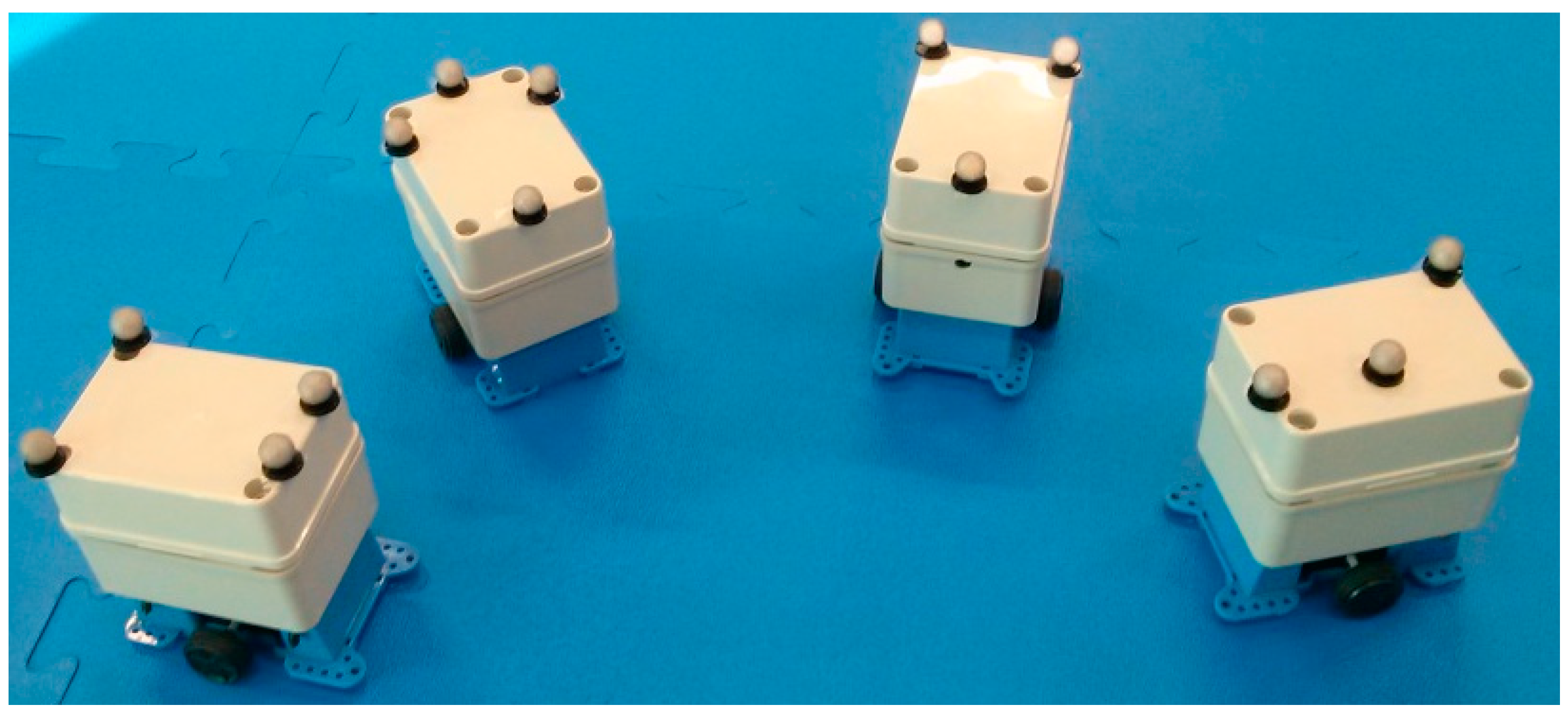
4.2. Experiment Results








5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Chaimowicz, L.; Kumar, V.; Campos, M.F. M. A paradigm for dynamic coordination of multiple robots. Auton. Robots 2004, 17, 7–21. [Google Scholar] [CrossRef]
- Lewis, M.A.; Tan, K.T. High precision formation control of mobile robots using virtual structures. Auton. Robots 1997, 4, 387–403. [Google Scholar] [CrossRef]
- Seiler, P.; Pant, A.; Hedrick, K. Disturbance propagation in vehicle strings. IEEE Trans. Autom. Control 2004, 49, 1835–1841. [Google Scholar] [CrossRef]
- Renfrew, A.; Villasenor, A.G.; Brunn, P. Contact bridging dampers for back-up on automated highways. IET Intell. Transp. Syst. 2007, 1, 167–175. [Google Scholar] [CrossRef]
- Fahimi, F. Sliding-mode formation control for underactuated surface vessels. IEEE Trans. Robot. 2007, 23, 617–622. [Google Scholar] [CrossRef]
- Gu, Y.; Seanor, B.; Campa, G.; Napolitano, M.R.; Rowe, L.; Gururajan, S.; Wan, S. Design and flight testing evaluation of formation control laws. IEEE Trans. Control Syst. Technol. 2006, 14, 1105–1112. [Google Scholar] [CrossRef]
- Ryoo, C.K.; Kim, Y.H.; Tahk, M.J. Optimal UAV formation guidance law with timing constraint. Int. J. Syst. Sci. 2006, 37, 415–427. [Google Scholar] [CrossRef]
- Ren, W.; Beard, R.W. Formation feedback control for multiple spacecraft via virtual structures. Control Theory Appl. 2004, 151, 357–368. [Google Scholar] [CrossRef]
- Juliá, M.; Gil, A.; Reinoso, O. Searching dynamic agents with a team of mobile robots. Sensors 2012, 12, 8815–8831. [Google Scholar] [CrossRef] [PubMed]
- Casbeer, D.W.; Kingston, D.B.; Beard, R.W.; Mclain, T.W. Cooperative forest fire surveillance using a team of small unmanned air vehicles. Int. J. Syst. Sci. 2006, 37, 351–360. [Google Scholar] [CrossRef]
- Meng, Q.H.; Yang, W.X.; Wang, Y.; Zeng, M. Collective odor source estimation and search in time-variant airflow environments using mobile robots. Sensors 2011, 11, 10415–10443. [Google Scholar] [CrossRef] [PubMed]
- Kwon, J.W. Cooperative environment scans based on a multi-robot system. Sensors 2015, 15, 6483–6496. [Google Scholar] [CrossRef] [PubMed]
- Kwon, J.W.; Chwa, D. Hierarchical formation control based on a vector field method for wheeled mobile robots. IEEE Trans. Robot. 2012, 28, 1335–1345. [Google Scholar] [CrossRef]
- Tanner, H.G.; Pappas, G.J.; Kumar, V. Leader-to-formation stability. IEEE Trans. Robot. Autom. 2004, 20, 443–455. [Google Scholar] [CrossRef]
- Das, A.K.; Fierro, R.; Kumar, V.; Ostrowski, J.P.; Spletzer, J.; Taylor, C.J. A vision-based formation control framework. IEEE Trans. Robot. Autom. 2002, 18, 813–825. [Google Scholar] [CrossRef]
- Park, B.S.; Park, J.B.; Choi, Y.H. Adaptive formation control of electrically driven nonholonomic mobile robots with limited information. IEEE Trans. Syst. Man Cybern. Part B Cybern. 2011, 41, 1061–1075. [Google Scholar] [CrossRef]
- Espinosa, F.; Santos, C.; Marrón-Romera, M.; Pizarro, D.; Valdés, F.; Dongil, J. Odometry and laser scanner fusion based on a discrete extended Kalman filter for robotic platooning guidance. Sensors 2011, 11, 8339–8357. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Chen, H. An interactive control algorithm used for equilateral triangle formation with robotic sensors. Sensors 2014, 14, 7229–7247. [Google Scholar] [CrossRef] [PubMed]
- Balch, T.; Arkin, R.C. Behavior-based formation control for multi-robot teams. IEEE Trans. Robot. Autom. 1998, 14, 926–939. [Google Scholar] [CrossRef]
- Olfati-Saber, R.; Murray, R.M. Distributed structural stabilization and tracking for formations of dynamic multi agents. In Proceedings of the IEEE Conference on Decision and Control, Las Vegas, NV, USA, 10–13 December 2002.
- Guinaldo, M.; Fábregas, E.; Farias, G.; Dormido-Canto, S.; Chaos, D.; Sánchez, J.; Dormido, S. A mobile robots experimental environment with event-based wireless communication. Sensors 2013, 13, 9396–9413. [Google Scholar] [CrossRef] [PubMed]
- Meng, Z.; Ren, W.; Cao, Y.; You, Z. Leaderless and leader-following consensus with communication and input delays under a directed network topology. IEEE Trans. Syst. Man Cybern. Part B Cybern. 2011, 41, 75–88. [Google Scholar] [CrossRef]
- Kim, H.; Shim, H.; Back, J.; Seo, J.H. Stabilizability of a group of single integrators and its application to decentralized formation problem. In Proceedings of the Decision and Control and European Control Conference, Orlando, FL, USA, 12–15 December 2011.
- Cao, Y.; Yu, W.; Ren, W.; Chen, G. An overview of recent progress in the study of distributed multi-agent coordination. IEEE Trans. Ind. Inform. 2013, 9, 427–438. [Google Scholar] [CrossRef]
- Vasudevan, S.; Kurose, J.; Towsley, D. Design and analysis of a leader election algorithm for mobile ad hoc networks. In Proceedings of the IEEE International Conference on Network Protocols, Berlin, Germany, 5–8 October 2004.
- Lee, S.; Muhammad, R.M.; Kim, C. A leader election algorithm within candidates on ad hoc mobile networks. In Embedded Software and Systems, Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2007; Volume 4523, pp. 728–738. [Google Scholar]
- Monteiro, S.; Bicho, E. Attractor dynamics approach to formation control: theory and application. Auton. Robots 2010, 29, 331–355. [Google Scholar] [CrossRef] [Green Version]
- Monteiro, S.; Bicho, E. Robot formations: Robots allocation and leader-follower pairs. In Proceedings of the IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008.
- Kwon, J.W.; Seo, J. Docking control on both stationary and moving stations based on a docking formation. Electron. Lett. 2014, 50, 436–438. [Google Scholar] [CrossRef]
- Chwa, D. Tracking control of differential-drive wheeled mobile robots using a backstepping-like feedback linearization. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2010, 40, 1285–1295. [Google Scholar] [CrossRef]
- Kanayama, Y.; Kimura, Y.; Miyazaki, F.; Noguchi, T. A stable tracking control method for a non-holonomic mobile robot. In Proceedings of the IEEE/RSJ International Workshop on Intelligent Robots and Systems, Osaka, Japan, 3–5 November 1991.
- Takahashi, H.; Nishi, H.; Ohnishi, K. Autonomous decentralized control for formation of multiple mobile robots considering ability of robot. IEEE Trans. Ind. Electron. 2004, 51, 1272–1278. [Google Scholar] [CrossRef]
- Fredslund, J.; Matarić, M.J. A general algorithm for robot formations using local sensing and minimal communication. IEEE Trans. Robot. Autom. 2002, 18, 837–846. [Google Scholar] [CrossRef]
- Kim, J.H.; Kwon, J.W.; Seo, J. Multi-UAV-based stereo vision system without GPS for ground obstacle mapping to assist path planning of UGV. Electron. Lett. 2014, 50, 1431–1432. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kwon, J.-W.; Kim, J.H.; Seo, J. Multiple Leader Candidate and Competitive Position Allocation for Robust Formation against Member Robot Faults. Sensors 2015, 15, 10771-10790. https://doi.org/10.3390/s150510771
Kwon J-W, Kim JH, Seo J. Multiple Leader Candidate and Competitive Position Allocation for Robust Formation against Member Robot Faults. Sensors. 2015; 15(5):10771-10790. https://doi.org/10.3390/s150510771
Chicago/Turabian StyleKwon, Ji-Wook, Jin Hyo Kim, and Jiwon Seo. 2015. "Multiple Leader Candidate and Competitive Position Allocation for Robust Formation against Member Robot Faults" Sensors 15, no. 5: 10771-10790. https://doi.org/10.3390/s150510771
APA StyleKwon, J. -W., Kim, J. H., & Seo, J. (2015). Multiple Leader Candidate and Competitive Position Allocation for Robust Formation against Member Robot Faults. Sensors, 15(5), 10771-10790. https://doi.org/10.3390/s150510771