
Integration of Directional Antennas in an RSS Fingerprinting-Based Indoor Localization System

Abstract
:1. Introduction
2. Related Work
3. Proposed Indoor Localization System

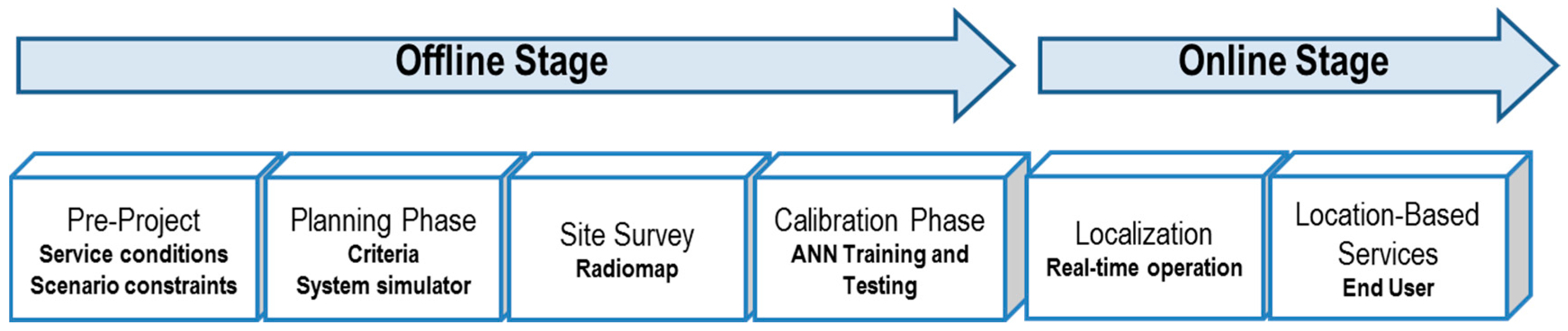
4. Deployment Cycle

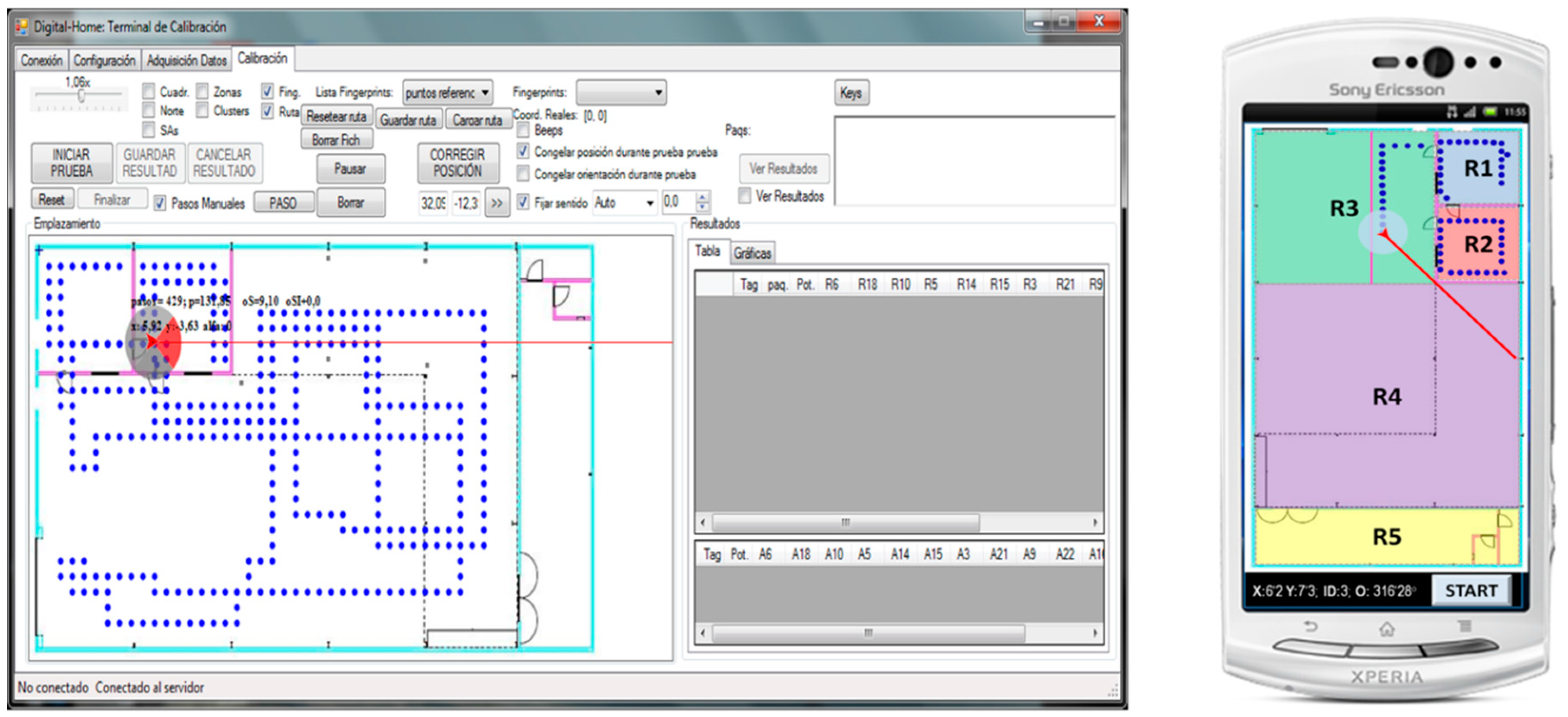
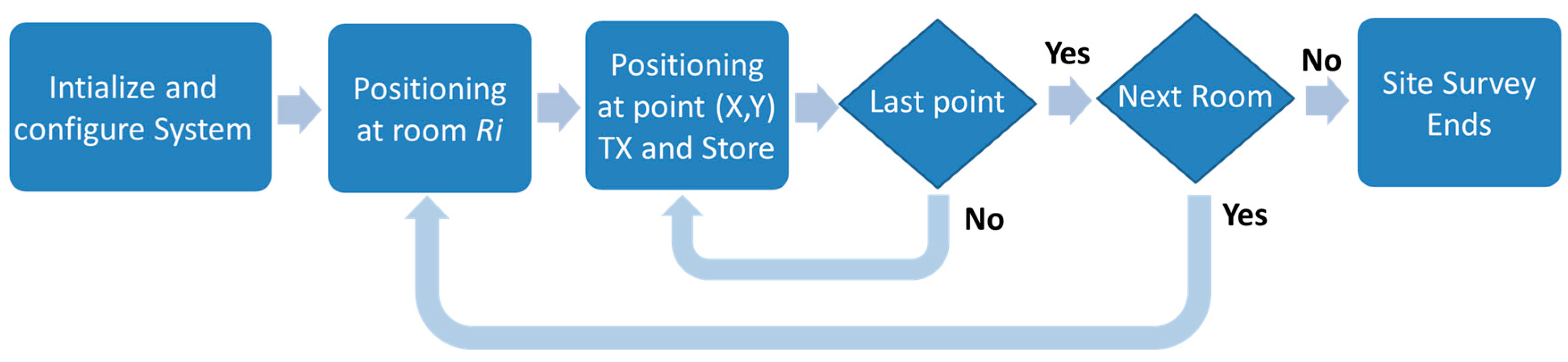
4.1. Site Survey and Calibration Phase
4.1.1. Radiomap Generation


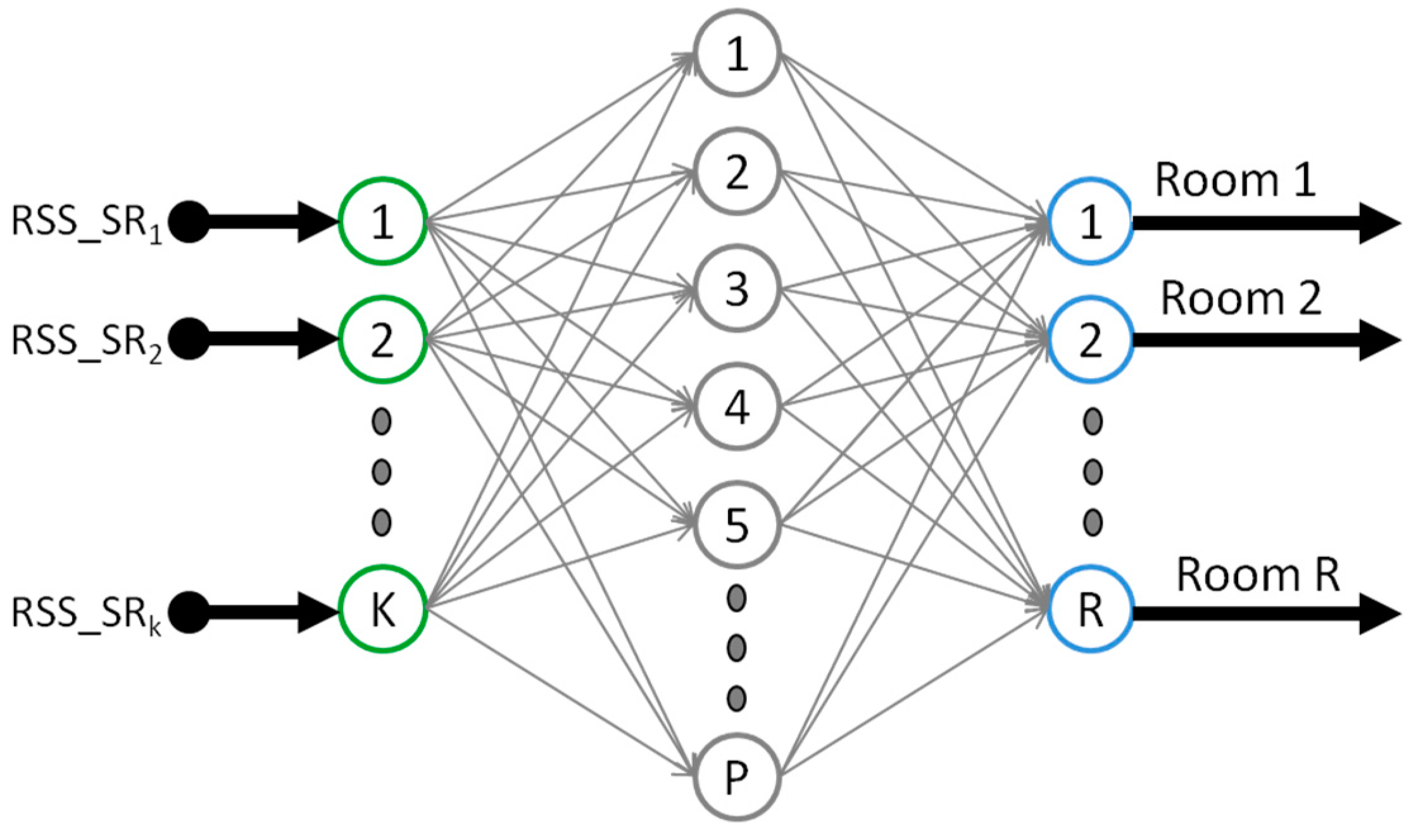
4.1.2. ANN Training

4.2. Planning Phase
- Consider valid locations to place the SRs; the antennas usually will be located next to walls/roofs or places where it is possible to fix their position without hindering the normal movement of people.
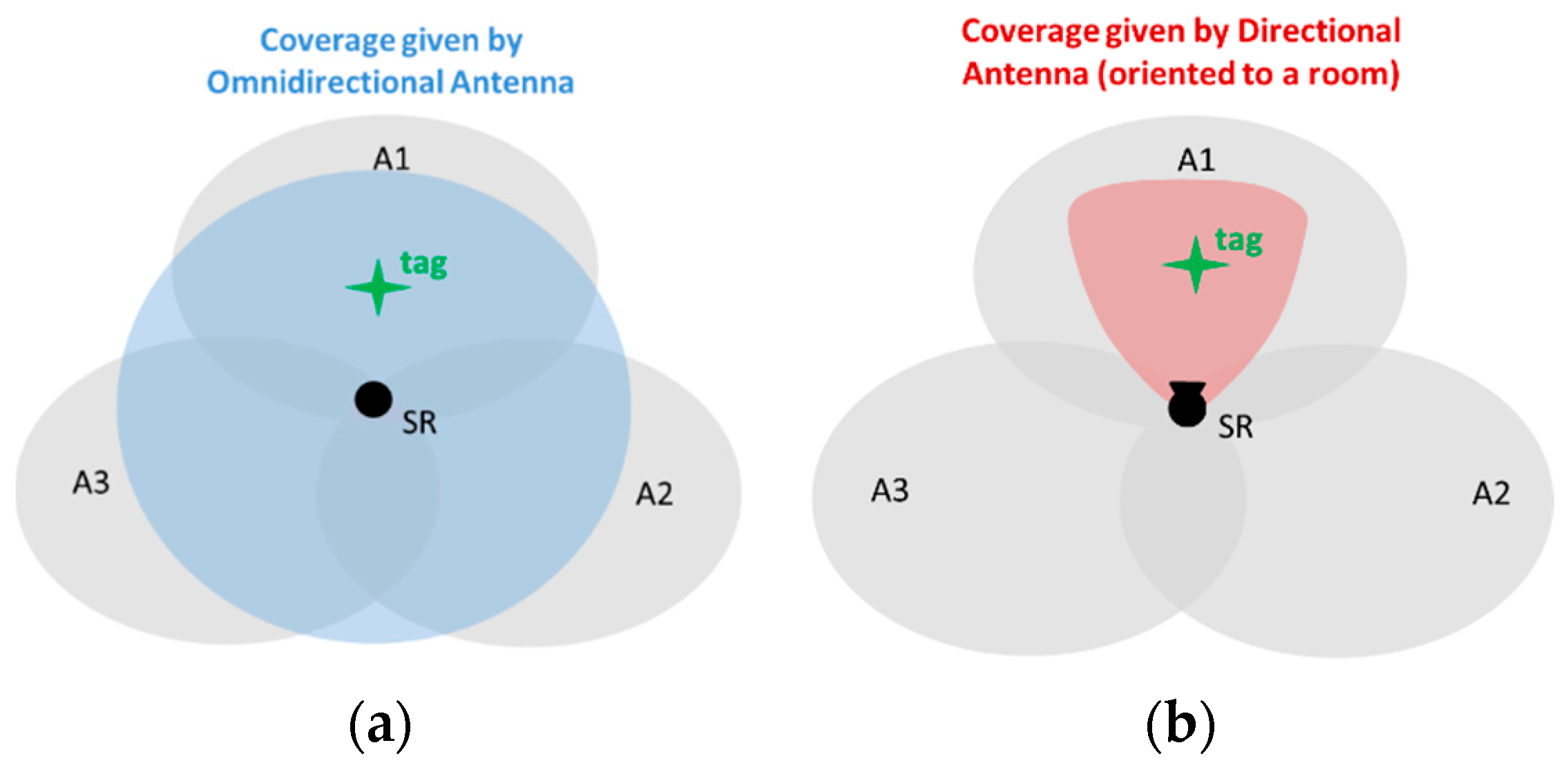
- The whole scenario should be connected by at least one SR with 90% (connectivity criterion). Omnidirectional antennas are useful to report wide coverage regions, while directional antennas can be added to give coverage to more specific zones.
- In order to strengthen the accuracy in a specific room/area, directional antennas can be positioned, oriented toward that direction. Thus, a stronger RSS should be captured by that directional antenna when the tag is located in the pointed area, generating more robust RSS fingerprints.
- Antennas must be separated enough to avoid similar RSS measurements.
4.2.1. Directional Antennas

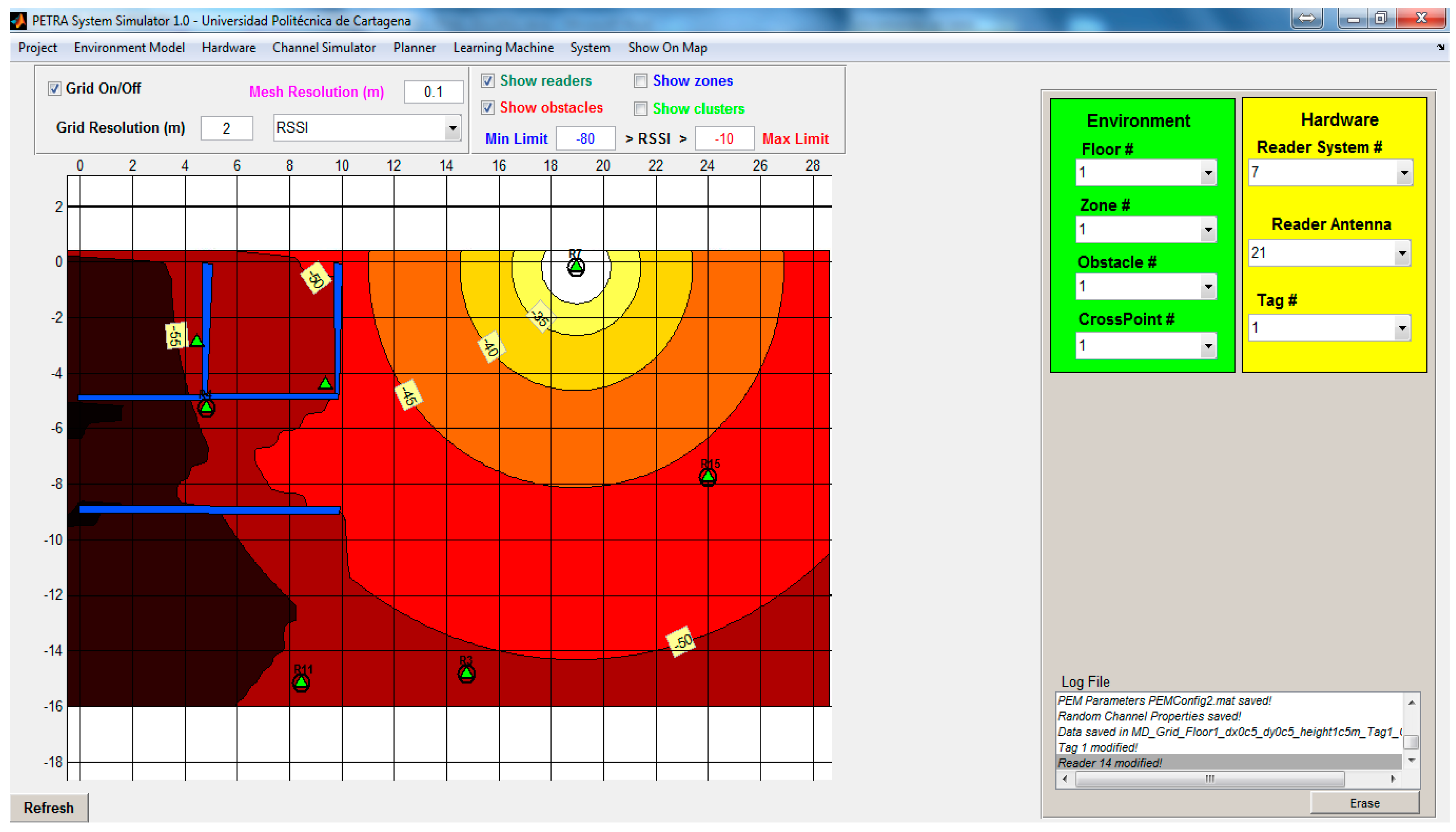
4.2.2. Simulation Tool

4.2.3. System Performance
4.2.4. Simulation Tool

5. Experimental Tests

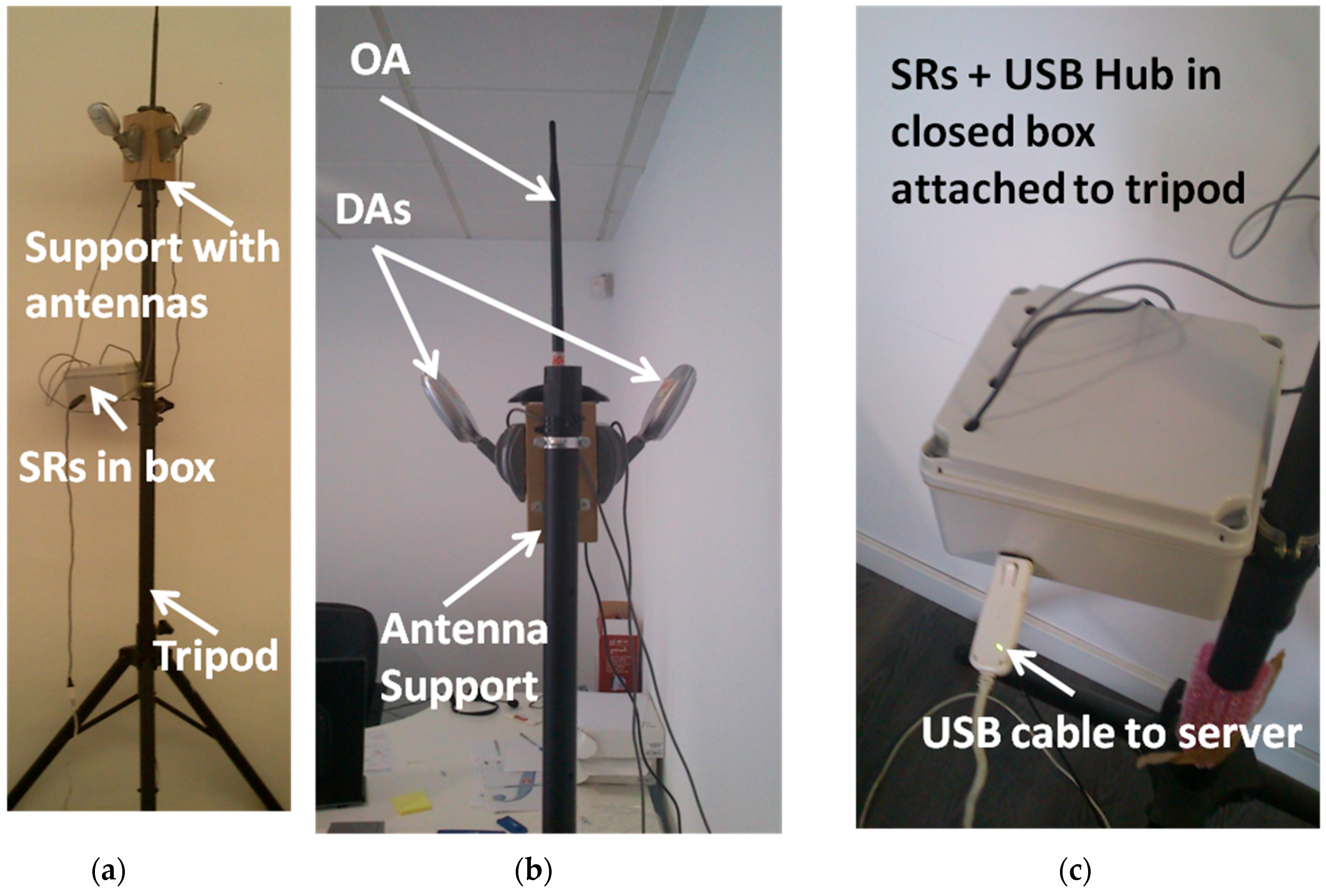
5.1. System Prototype


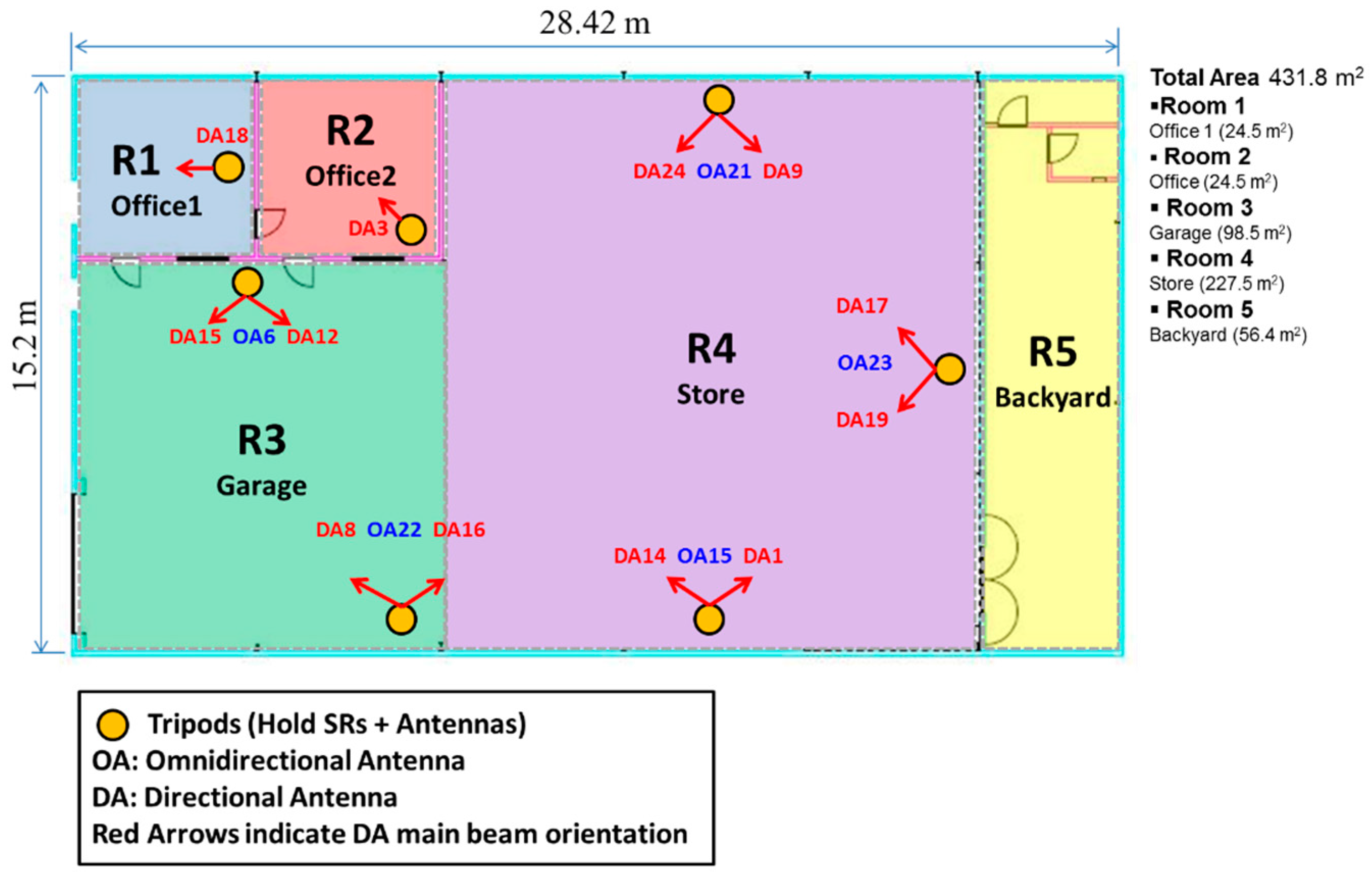
5.2. Experimental Setup
- Tag transmission power PTX = 0 dBm,
- Number of beacons per tag transmission N = 20,
- Refresh transmission time T = 500 ms.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| R1 | R2 | R3 | R4 | R5 | Total | |
|---|---|---|---|---|---|---|
| # Samples | 86 | 137 | 264 | 438 | 170 | 1095 |
| Samples/m2 | 3.5 | 5.6 | 2.7 | 1.9 | 3.0 | 2.5 |
5.3. Test and Results

| # | Antennas ID | Ps1 (%) | Ps2 (%) | Ps3 (%) | Ps4 (%) | Ps5 (%) | Ps (%) |
|---|---|---|---|---|---|---|---|
| 1 | 3 OA = {2,3,4} | 17 | 7.8 | 18.3 | 68.5 | 39.8 | 43.9 |
| 2 | 3 OA = {1,2,3} | 18.2 | 6.7 | 52.3 | 62.1 | 44.6 | 52.5 |
| 3 | 5 OA = {1–5} | 21.3 | 7.1 | 51.3 | 68.1 | 44.7 | 53.8 |
| 4 | 2 DA = {1,10} | 67.4 | 36.1 | 36.0 | 65.1 | 47.9 | 54.5 |
| 5 | 3 DA = {1,5,11} | 69.7 | 39.9 | 57.1 | 60.6 | 52.6 | 65.4 |
| 6 | 5 DA = {1,2,5,8,10} | 73.5 | 81.1 | 71.4 | 70.4 | 55.1 | 75.7 |
| 7 | 8 DA = {3,4,5,6,7,9,11,12} | 13.9 | 32.4 | 74.4 | 81.8 | 49.8 | 63.4 |
| 8 | 12 DA = {1–12} | 72.3 | 85.0 | 77.6 | 82.2 | 62.1 | 80.7 |
| 9 | 3 OA = {2,3,4} + 1 DA = {1} | 71.4 | 38.5 | 41.3 | 68.5 | 48.4 | 63.9 |
| 10 | 3 OA = {2,3,4} + 1 DA = {2} | 20.6 | 74.0 | 45.1 | 64.3 | 52.2 | 59.9 |
| 11 | 3 OA = {2,3,4} + 2 DA = {1,2} | 70.8 | 74.4 | 68.9 | 83.2 | 53.2 | 79.4 |
| 12 | 5 OA = {1-5} + 12 DA = {1–12} | 79.4 | 84.0 | 74.6 | 82.5 | 57.1 | 81.0 |

5.4. Discussion
- It has been observed that the monotonically-increasing tendency of accuracy (successes probability) with the number of antennas is not totally true. The planning phase (antennas’ position) affects the performance of the system severely.
- DAs may improve the accuracy of the system if they are properly deployed and oriented, allowing a better distinction between target areas (rooms) without excessively increasing the number of antennas. During the experiments, this is demonstrated with a configuration with five antennas (three AOs and two ADs), which results in a similar performance as the one obtained by 17 antennas (five AOs and 12 ADs).
- The above point endorses that the integration of DAs increases the fingerprint quality, making RSS patterns more robust against noise and more easily recognizable by the MLP algorithm.
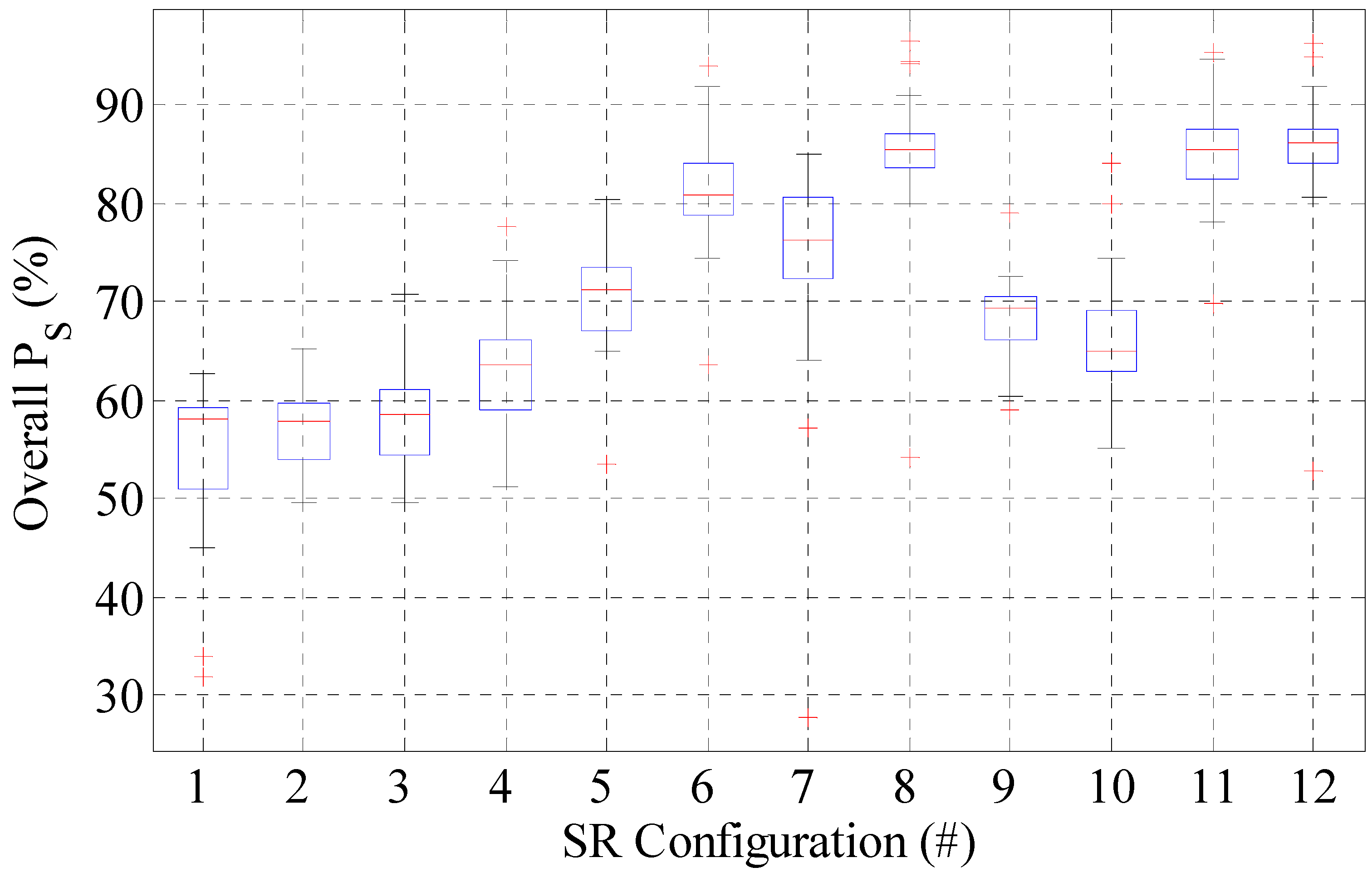
- The metric we have employed is quite demanding, as we calculate the minimum Ps obtained for 90% of the tests, which gives an estimation of the system reliability for 90% of the time.
- The work in [21,22,23] provided average Ps, which is the mean of all of the tests conducted. This metric is much poorer, as it does not talk about the reliability of the system and takes into account outliers. In fact, if we averaged the Ps results for the 27 tests done with Configuration 11, our average success Ps (average) = 86% (see the red line in the middle of the box for Configuration #11 in Figure 13), which seems to be much better, but it has no information about reliability.
- Furthermore, no information regarding the conditions of the tag or the scenario is given (e.g., some questions related to the static, fixed orientation of the tag during transmission/reception; people presence in the environment).
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Kolodziej, K.W.; Hjelm, J. Local Positioning Systems: LBS Applications and Services; CRC Press: Boca Raton, FL, USA, 2006. [Google Scholar]
- Engee, P.K. The global positioning system: Signals, measurements and performance. Int. J. Wirel. Inf. Netw. 1994, 1, 83–105. [Google Scholar] [CrossRef]
- Deak, G.; Curran, K.; Condell, J. A survey of active and passive indoor localisation systems. Comput. Commun. 2012, 35, 1939–1954. [Google Scholar] [CrossRef]
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of Wireless Indoor Positioning Techniques and Systems. IEEE Trans. Syst. Man Cybern. Part. C Appl. Rev. 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Dardari, D.; Closas, P.; Djuric, P.M. Indoor Tracking: Theory, Methods, and Technologies. IEEE Trans. Veh. Technol. 2015, 64, 1263–1278. [Google Scholar] [CrossRef]
- Kok, M.; Hol, J.D.; Schon, T.B. Indoor Positioning Using Ultrawideband and Inertial Measurements. IEEE Trans. Veh. Technol. 2015, 64, 1293–1303. [Google Scholar] [CrossRef]
- Wu, Z.-H.; Han, Y.; Chen, Y.; Liu, K.J.R. A Time-Reversal Paradigm for Indoor Positioning System. IEEE Trans. Veh. Technol. 2015, 64, 1331–1339. [Google Scholar] [CrossRef]
- Atia, M.M.; Liu, S.; Nematallah, H.; Karamat, T.B.; Noureldin, A. Integrated Indoor Navigation System for Ground Vehicles With Automatic 3-D Alignment and Position Initialization. IEEE Trans. Veh. Technol. 2015, 64, 1279–1292. [Google Scholar] [CrossRef]
- Yang, J.; Chen, Y. Indoor Localization Using Improved RSS-Based Lateration Methods. In Proceedings of the IEEE Global Telecommunications Conference, Honolulu, HA, USA, 30 November–4 December 2009; pp. 1–6.
- He, T.; Huang, C.; Blum, B.M.; Stankovic, J.A.; Abdelzaher, T. Range-free localization schemes for large scale sensor networks. In Proceedings of the 9th annual international conference on Mobile computing and networking (MobiCom’03), San Diego, CA, USA, 14–19 September 2003; pp. 81–95.
- Bahl, P.; Padmanabhan, V.N. RADAR: An in-building RF-based user location tracking system. In Proceedings of the IEEE Nineteenth Annual Joint Conference of the IEEE Computer and Communications Societies, Tel Aviv, Israel, 23–30 March 2000; pp. 775–784.
- Dao, T.-K.; Pham, T.-T.; Castelli, E.A. Robust WLAN Positioning System Based on Probabilistic Propagation Model. In Proceedings of the 9th International Conference on Intelligent Environments (IE), Athens, Greece, 18–19 July 2013; pp. 24–29.
- D'Hoe, K.; Ottoy, G.; Goemaere, J.P.; Strycker, L. Indoor Room Location Estimation. Adv. Electr. Comput. Eng. 2008, 8, 78–81. [Google Scholar] [CrossRef]
- Macii, D.; Colombo, A.; Pivato, P.; Fontanelli, D. A Data Fusion Technique for Wireless Ranging Performance Improvement. IEEE Trans. Instrum. Meas. 2013, 62, 27–37. [Google Scholar] [CrossRef]
- Kaemarungsi, K. Design of Indoor Positioning Systems Based on Location Fingerprinting Technique. Ph.D. Thesis, University of Pittsburgh, Pennsylvania, PA, USA, February 2005. [Google Scholar]
- Elnahrawy, E.; Li, X.; Martin, R.P. The limits of localization using signal strength: A comparative study. In Proceedings of the 2004 First Annual IEEE Communications Society Conference on Sensor and Ad Hoc Communications and Networks, Santa Clara, CA, USA, 4–7 October 2004; pp. 406–414.
- Kaemarungsi, K. Distribution of WLAN received signal strength indication for indoor location determination. In Proceedings of the 2006 1st International Symposium on Wireless Pervasive Computing, Phuket, Thailand, 16–18 January 2006.
- Chai, X.; Yang, Q. Reducing the Calibration Effort for Probabilistic Indoor Location Estimation. IEEE Trans. Mob. Comput. 2007, 6, 649–662. [Google Scholar] [CrossRef]
- Yin, J.; Yang, Q.; Ni, L. Adaptive Temporal Radio Maps for Indoor Location Estimation. In Proceedings of the Third IEEE International Conference on Pervasive Computing and Communications, Kauai, HA, USA, 8–12 March 2005; pp. 85–94.
- Youssef, M.; Agrawala, A. The Horus location determination system. Wirel. Netw. 2007, 14, 357–374. [Google Scholar] [CrossRef]
- Chiu, Y.M.; Wang, K.; Jan, R.H.; Hu, Y.J.; Ku, T.H. An efficient room-based indoor localization scheme for wireless sensor networks. In Proceedings of the 5th Workshop on Wireless Ad Hoc and Sensor Networks, Hsinchu, China, 10–11 September 2009.
- Lo, C.-C.; Chen, C.-C.; Tseng, Y.-C.; Chiang, J.-C.; Feng, K.-C.; Kuo, L.-C.; Wang, Y.-C. A Room-Based Localization System Using Wireless Triggers and Pattern Matching Techniques. In Proceedings of the IEEE VTS Asia Pacific Wireless Communications Symposium (APWCS), Kyoto, Japan, 19–21 August 2012.
- Hotta, S.; Hada, Y.; Yaginuma, Y. A robust room-level localization method based on transition probability for indoor environments. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sidney, Australia, 13–15 November 2012; pp. 1–8.
- Wu, C.L.; Fu, L.C.; Lian, F.L. WLAN location determination in ehome via support vector classification. In Proceedings of the 2004 IEEE International Conference on Networking, Sensing and Control, Taipei, Taiwan, 21–23 March 2004; pp. 1026–1031.
- Battiti, R.; Villani, A.; Nhat, T.L. Neural network models for intelligent networks: Deriving the location from signal patterns. In Proceedings of Annual Symposium on Autonomous Intelligent Networks and Systems (AINS), Los Angeles, CA, USA, 8–9 May 2002.
- Brunato, M.; Battiti, R. Statistical learning theory for location fingerprinting in wireless LANs. Comput. Netw. 2005, 47, 825–845. [Google Scholar] [CrossRef]
- Ahmad, U.; Gavrilov, A.V.; Lee, S.; Lee, Y.K. A modular classification model for received signal strength based location systems. Neurocomputing 2008, 71, 2657–2669. [Google Scholar] [CrossRef]
- Tsai, C.-Y.; Chou, S.-Y.; Lin, S.-W.; Wang, W.-H. Location determination of mobile devices for an indoor WLAN application using a neural network. Knowl. Inf. Syst. 2009, 20, 81–93. [Google Scholar] [CrossRef]
- Martínez-Sala, A.S.; Guzman-Quirós, R.; Egea-López, E. Using neural networks and Active RFID for indoor location services. In Proceedings of the 2010 European Workshop on Smart Objects: Systems, Technologies and Applications (RFID Sys Tech), Ciudad Real, Spain, 15–16 June 2010; pp. 1–9.
- Kaemarungsi, K.; Krishnamurthy, P. Properties of indoor received signal strength for WLAN location fingerprinting. In Proceedings of the First Annual International Conference on Mobile and Ubiquitous Systems: Networking and Services, Boston, MA, USA, 22–26 August 2004; pp. 14–23.
- Blumrosen, G.; Luttwak, A. Human Body Parts Tracking and Kinematic Features Assessment Based on RSSI and Inertial Sensor Measurements. Sensors 2013, 13, 11289–11313. [Google Scholar] [CrossRef] [PubMed]
- Chen, Z.; Zou, H.; Jiang, H.; Zhu, Q.; Soh, Y.-C.; Xie, L. Fusion of WiFi, Smartphone Sensors and Landmarks Using the Kalman Filter for Indoor Localization. Sensors 2015, 15, 715–732. [Google Scholar] [CrossRef] [PubMed]
- Outemzabet, S.; Nerguizian, C. Accuracy enhancement of an indoor ANN-based fingerprinting location system using Kalman filtering. In Proceedings of the IEEE 19th International Symposium on Personal, Indoor and Mobile Radio Communications, Cannes, France, 15–18 September 2008; pp. 1–5.
- Ali-Loytty, S.; Perala, T.; Honkavirta, V.; Piche, R. Fingerprint Kalman Filter in indoor positioning applications. In Proceedings of the 2009 IEEE Control Applications, (CCA) and Intelligent Control, Saint Petersburg, Russia, 8–10 July 2009; pp. 1678–1683.
- Jan, S.-S.; Hsu, L.-T.; Tsai, W.-M. Development of an Indoor Location Based Service Test Bed and Geographic Information System with a Wireless Sensor Network. Sensors 2010, 10, 2957–2974. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Dashti, M.; Abd Rahman, M.A.; Zhang, J. Indoor localization using smartphone inertial sensors. In Proceedings of the 2014 11th Workshop on Positioning, Navigation and Communication (WPNC), Dresden, Germany, 12–13 March 2014; pp. 1–6.
- Gaedeke, T.; Johnson, M.; Hedley, M.; Stork, W. Fusion of wireless ranging and inertial sensors for precise and scalable indoor localization. In Proceedings of the 2014 IEEE International Conference on Communications Workshops (ICC), Sidney, Australia, 10–14 June 2014; pp. 138–143.
- Chen, X.; Yan, X.; Shen, X. Indoor positioning fusion algorithm for smartphones. In Proceedings of the 2014 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Busan, Korea, 27–30 October 2014; pp. 620–626.
- Ekahau. Available online: http://www.ekahau.com/real-time-location-system (accessed on 15 November 2015).
- Versustech. Available online: http://www.versustech.com/rtls-vendor/ (accessed on 15 November 2015).
- Visionic Tecnologies. Available online: http://www.elpas.com/products/IR-Reader.aspx (accessed on 15 November 2015).
- Centrak. Available online: https://www.centrak.com/solution-overview/ (accessed on 15 November 2015).
- Aeroscout. Available online: http://www.stanleyhealthcare.com/products/ex4000-exciter (accessed on 15 November 2015).
- Brás, L.; Carvalho, N.B.; Pinho, P.; Kulas, L.; Nyka, K.A. Review of Antennas for Indoor Positioning Systems. Int. J. Antennas Propag. 2012, 2012, 1–14. [Google Scholar] [CrossRef]
- Jiang, J.-R.; Lin, C.-M.; Lin, F.-Y.; Huang, S.-T. ALRD: AoA localization with RSSI differences of directional antennas for wireless sensor networks. In Proceedings of the 2012 International Conference on Information Society (i-Society), London, UK, 25–28 June 2012; pp. 304–309.
- Werner, J.; Wang, J.; Hakkarainen, A.; Gulati, N.; Patron, D.; Pfeil, D.; Dandekar, K.; Cabric, D.; Valkama, M. Sectorized Antenna-based DoA Estimation and Localization: Advanced Algorithms and Measurements. IEEE J. Sel. Areas Commun. 2015, 33, 2272–2286. [Google Scholar] [CrossRef]
- Ou, Ch.-H. A Localization Scheme for Wireless Sensor Networks Using Mobile Anchors With Directional Antennas. IEEE Sens. J. 2011, 11, 1607–1616. [Google Scholar] [CrossRef]
- Niculescu, D.; Nath, B. Ad hoc positioning system (APS) using AOA. In Proceedings of the Twenty-Second Annual Joint Conference of the IEEE Computer and Communications. IEEE Societies, San Francisco, CA, USA, 30 March–3 April 2003; pp. 1734–1743.
- Nasipuri, A.; Li, K. A directionality based location discovery scheme for wireless sensor networks. In Proceedings of the 1st ACM international workshop on Wireless sensor networks and applications, Atlanta, GA, USA, 28 September 2002; pp. 105–111.
- Chintalapudi, K.K.; Dhariwal, A.; Govindan, R.; Sukhatme, G. Ad-hoc localization using ranging and sectoring. In Proceedings of the Twenty-third Annual Joint Conference of the IEEE Computer and Communications Societies, Hong Kong, China, 7–11 March 2004; pp. 2662–2672.
- Malhotra, N.; Krasniewski, M.; Yang, C.-L.; Bagchi, S.; Chappell, W. Location estimation in ad-hoc networks with directional antenna. In Proceedings of the 25th IEEE International Conference on Distributed Computing Systems, Columbus, OH, USA, 6–10 June 2005; pp. 633–642.
- Jang, H.; Choi, H.; Jung, Y.; Baek, Y. Robustness of Distributed RTLS for Dense Large-Scale Environments. In Proceedings of the 2010 Seventh International Conference on Information Technology: New Generations, Las Vegas, NV, USA, 12–14 April 2010; pp. 58–63.
- Ahmad, U.; Gavrilov, A.V.; Lee, Y.K.; Lee, S. Context-aware, self-scaling Fuzzy ArtMap for received signal strength based location systems. Soft Comput. 2007, 12, 699–713. [Google Scholar] [CrossRef]
- Hornik, K. Approximation capabilities of multilayer feedforward networks. Neural Netw. 1991, 4, 251–257. [Google Scholar] [CrossRef]
- Hagan, M.; Menhaj, M. Training Feedforward networks with the Marquardt algorithm. IEEE Trans. Neural Netw. 1994, 5, 989–993. [Google Scholar] [CrossRef] [PubMed]
- Meng, W.; He, Y.; Deng, Z.; Li, C. Optimized access points deployment for WLAN indoor positioning system. In Proceedings of the 2012 IEEE Wireless Communications and Networking Conference (WCNC), Paris, France, 1–4 April 2012; pp. 2457–2461.
- Du, Y.; Yang, D.; Xiu, C.A. Novel Method for Constructing a WIFI Positioning System with Efficient Manpower. Sensors 2015, 15, 8358–8381. [Google Scholar] [CrossRef] [PubMed]
- Matlab Neural Tool Box. Available online: http://www.mathworks.com/ (accessed on 1 February 2015).
- Rappaport, T.S. Wireless Communications: Principles and Practice, 2nd ed.; Prentice Hall PTR: Upper Saddle River, NJ, USA, 2001. [Google Scholar]
- Texas Instruments. Available online: http://www.ti.com/product/cc2510f16 (accessed on 15 March 2015).
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guzmán-Quirós, R.; Martínez-Sala, A.; Gómez-Tornero, J.L.; García-Haro, J. Integration of Directional Antennas in an RSS Fingerprinting-Based Indoor Localization System. Sensors 2016, 16, 4. https://doi.org/10.3390/s16010004
Guzmán-Quirós R, Martínez-Sala A, Gómez-Tornero JL, García-Haro J. Integration of Directional Antennas in an RSS Fingerprinting-Based Indoor Localization System. Sensors. 2016; 16(1):4. https://doi.org/10.3390/s16010004
Chicago/Turabian StyleGuzmán-Quirós, Raúl, Alejandro Martínez-Sala, José Luis Gómez-Tornero, and Joan García-Haro. 2016. "Integration of Directional Antennas in an RSS Fingerprinting-Based Indoor Localization System" Sensors 16, no. 1: 4. https://doi.org/10.3390/s16010004
APA StyleGuzmán-Quirós, R., Martínez-Sala, A., Gómez-Tornero, J. L., & García-Haro, J. (2016). Integration of Directional Antennas in an RSS Fingerprinting-Based Indoor Localization System. Sensors, 16(1), 4. https://doi.org/10.3390/s16010004