A Mathematical Model of a Novel 3D Fractal-Inspired Piezoelectric Ultrasonic Transducer


Abstract
:1. Introduction
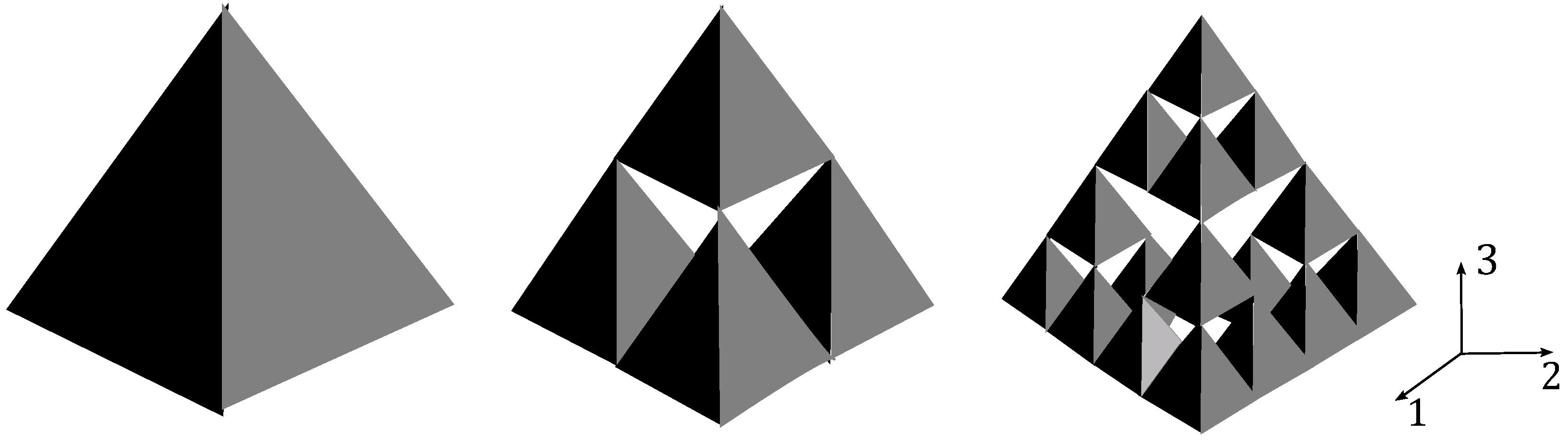
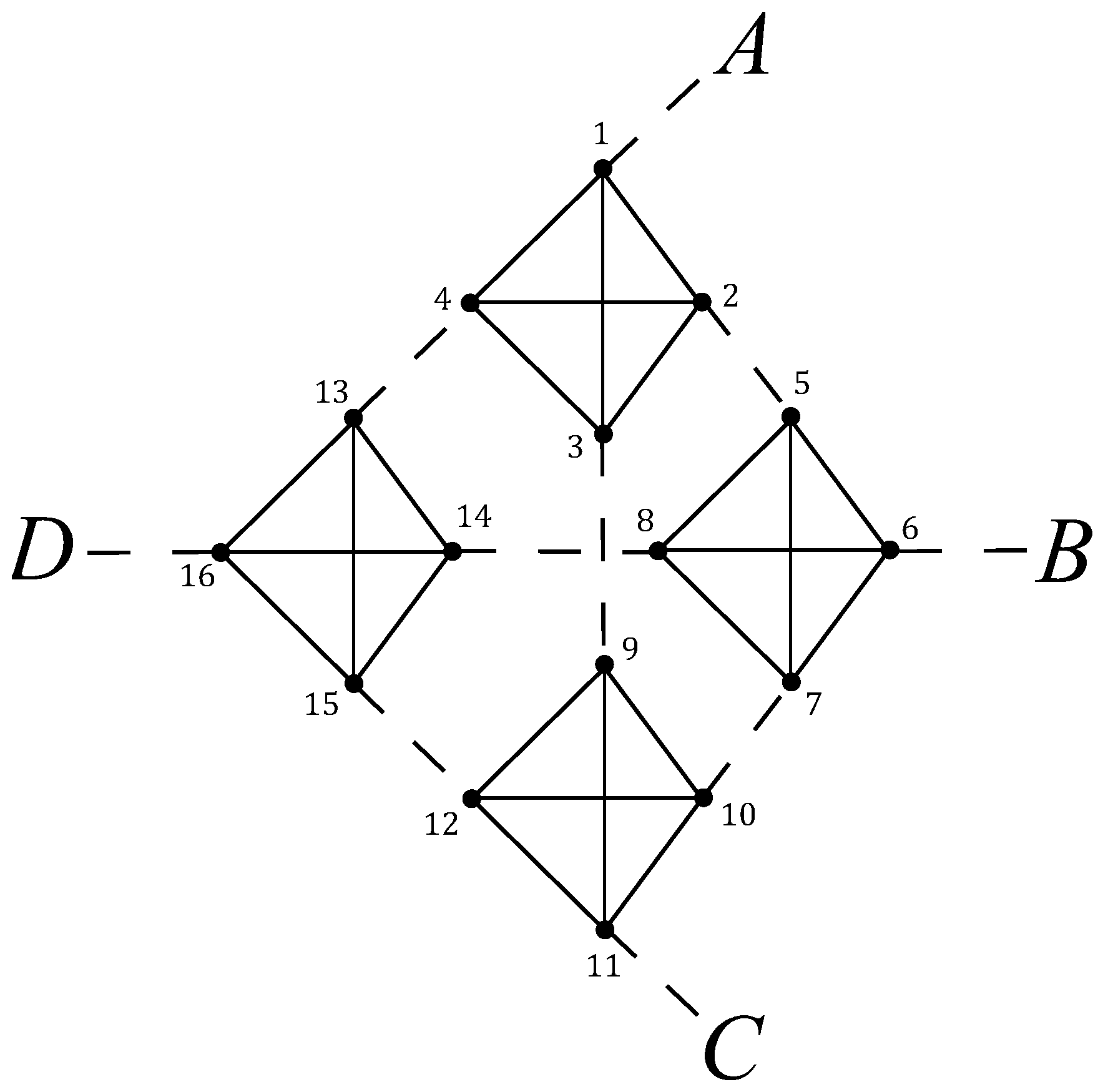
2. Lattice Structure of the Sierpinski Tetrix
3. Wave Propagation in the Sierpinski Tetrix
4. Renormalization Analysis
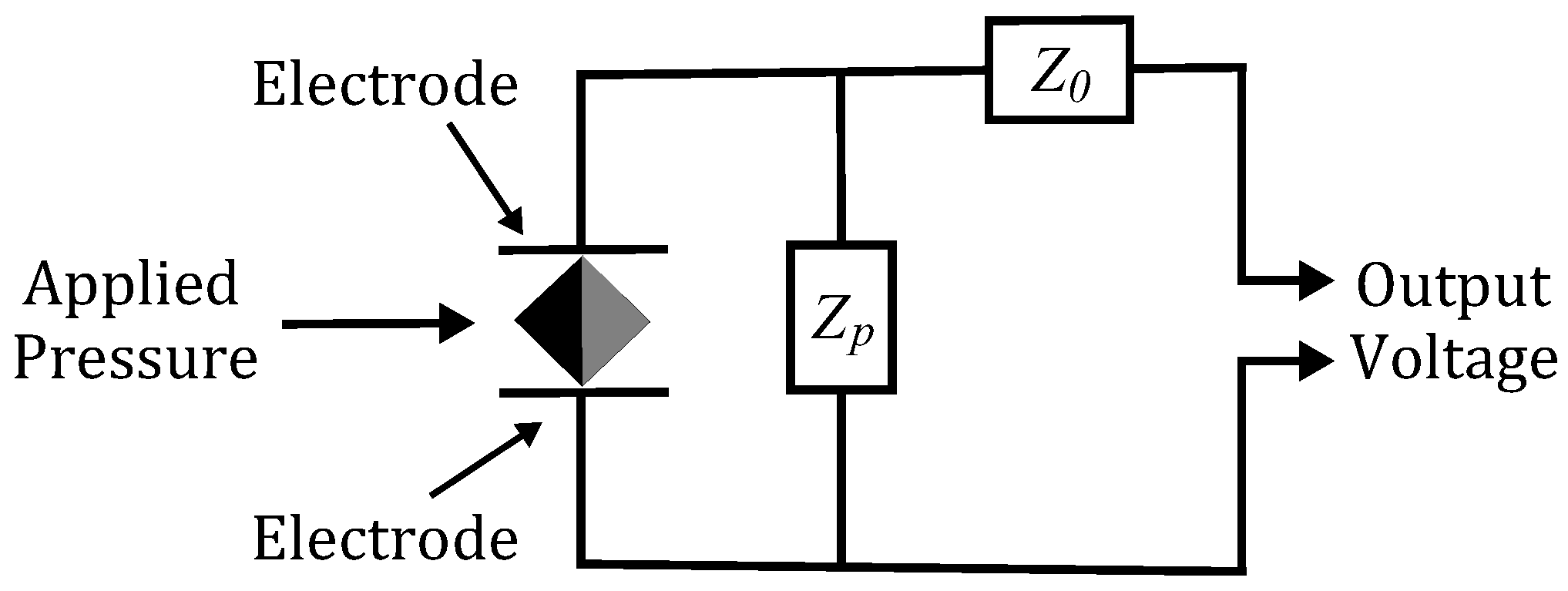
5. Derivation of the Reception Force Response (RFR)
6. Results
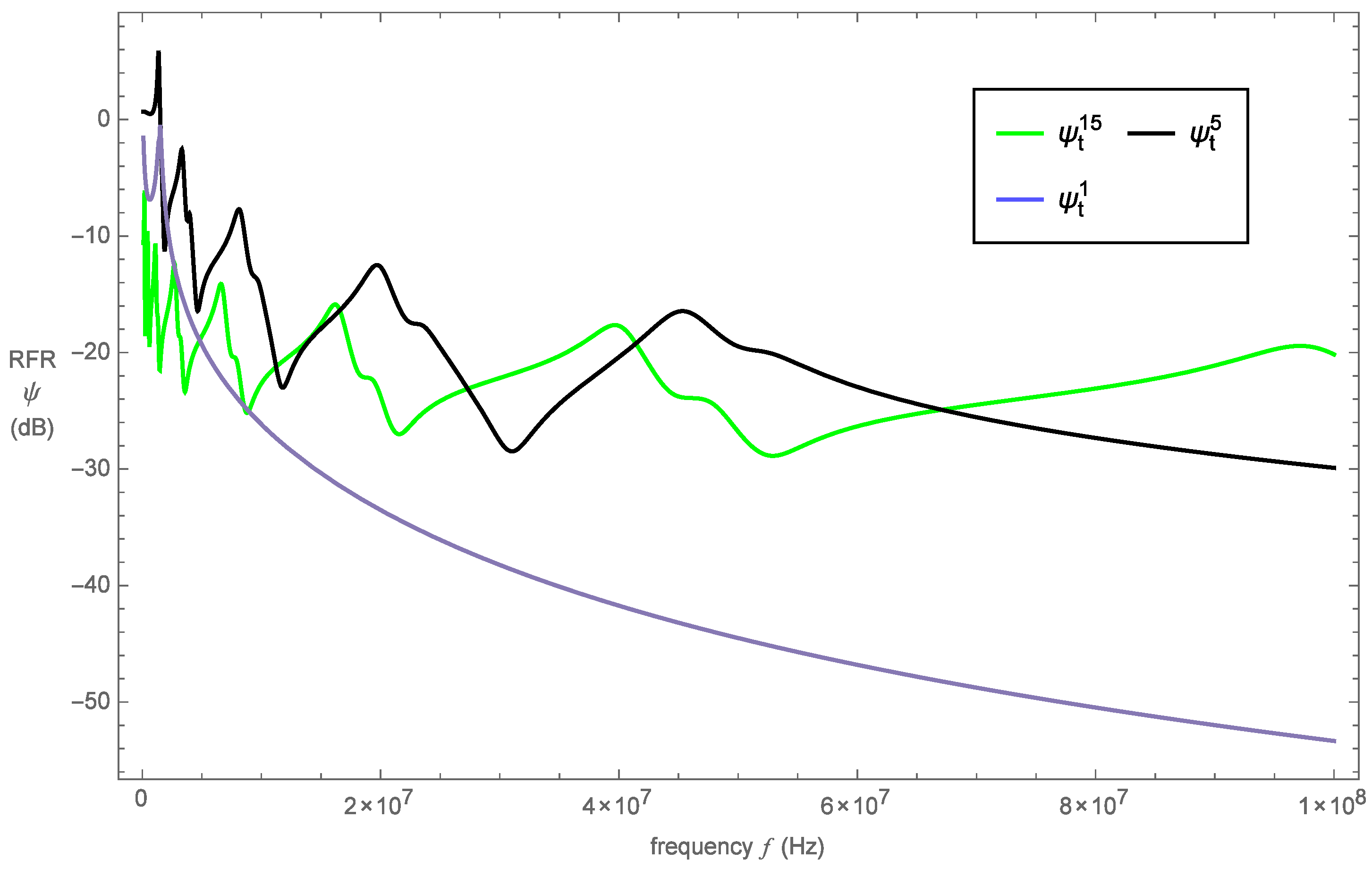
6.1. Sensor Performance at Varying Fractal Generation Levels
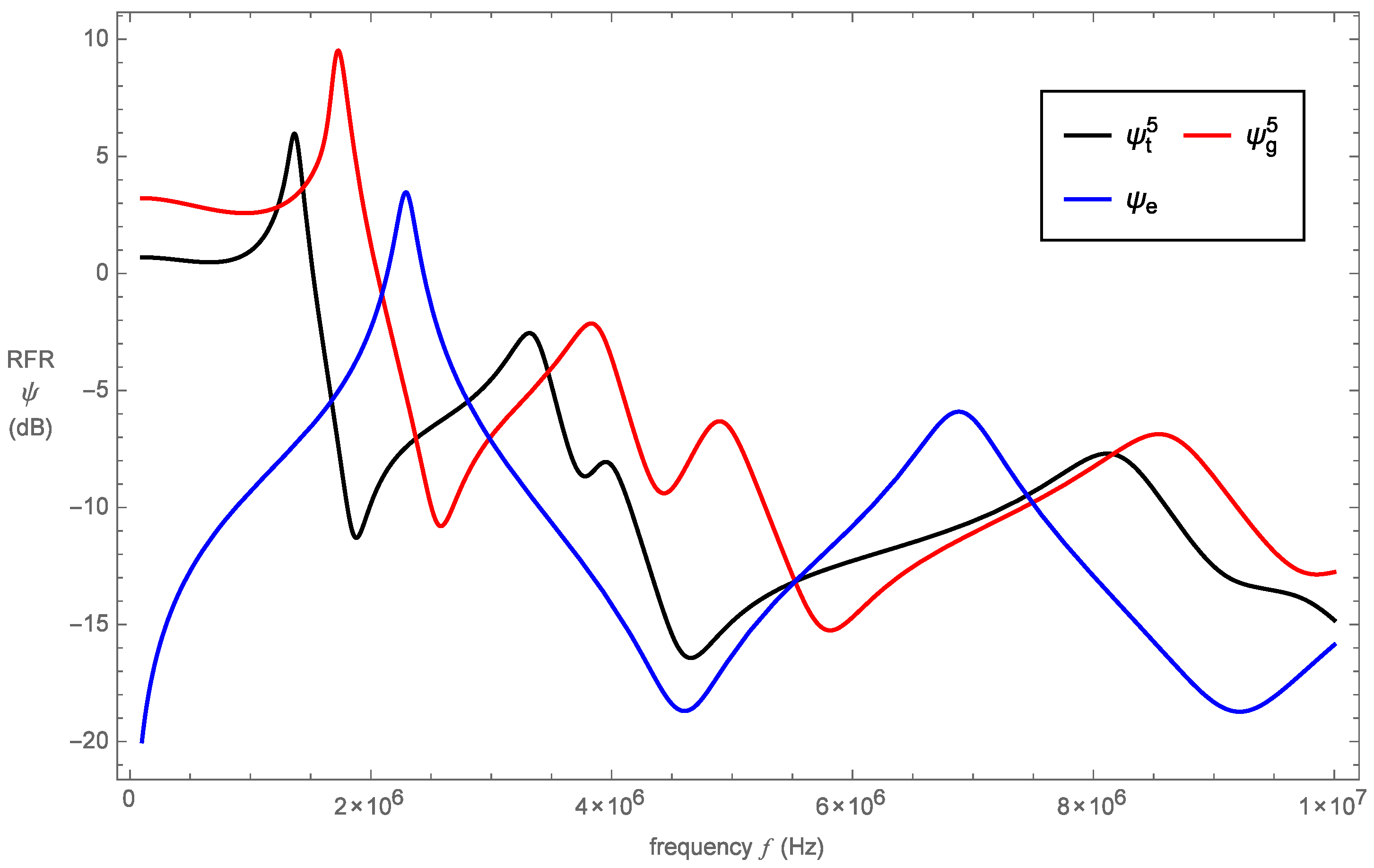
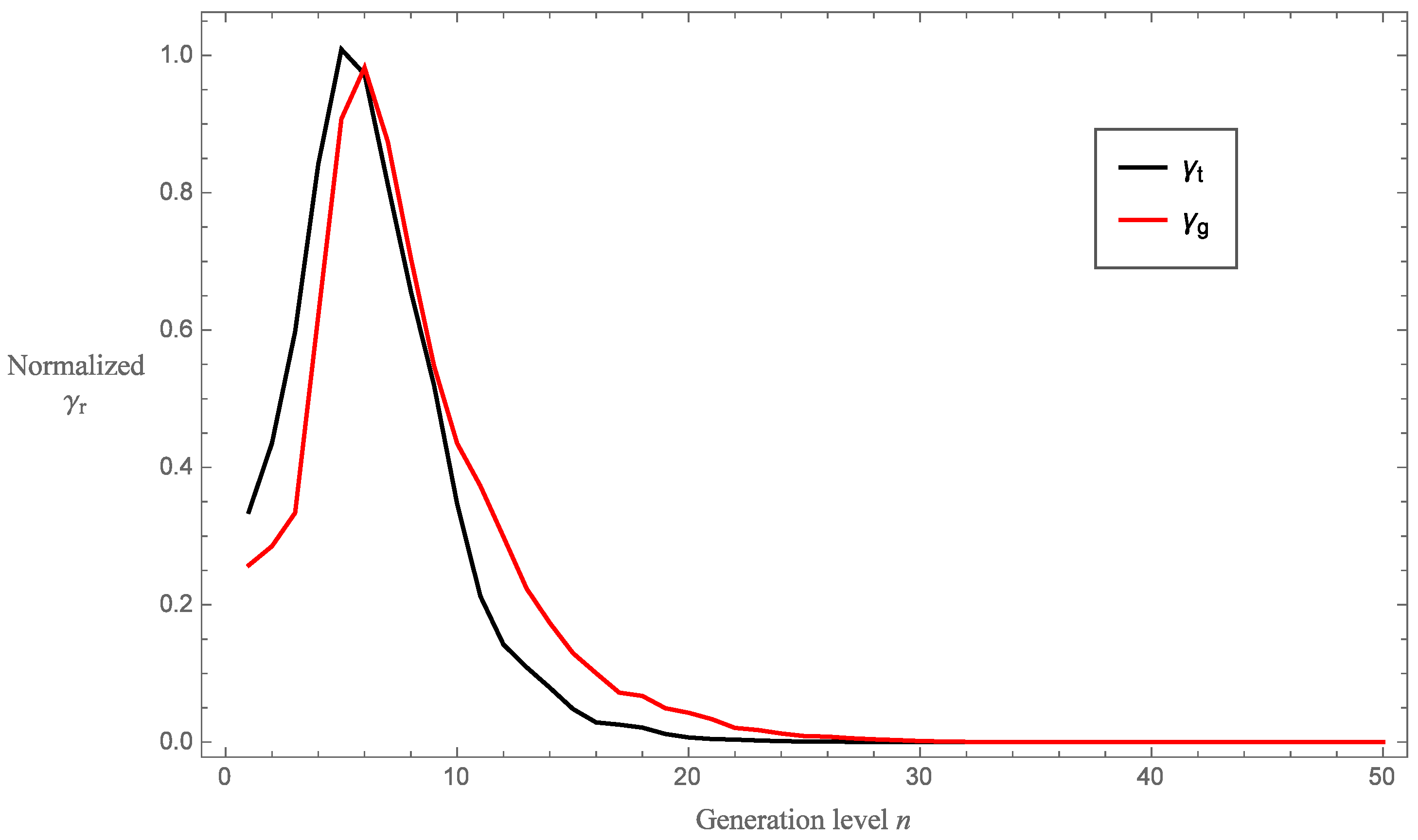
6.2. Comparison between Standard and Pre-Fractal Devices
6.3. Convergence of the Model
7. Discussion
8. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Hoskins, P.R.; Martin, K.; Thrush, A. Diagnostic Ultrasound: Physics and Equipment; Cambridge University Press: Cambridge, UK, 2010. [Google Scholar]
- Nakamura, K. Ultrasonic Transducers: Materials and Design for Sensors, Actuators and Medical Applications; Woodhead Publishing: Cambridge, UK, 2012. [Google Scholar]
- Schwartz, M. Smart Materials; CRC Press: Boca Raton, FL, USA, 2008. [Google Scholar]
- Ramadas, S.N.; Hayward, G. Knowledge Based Approach for Design Optimization of Ultrasonic Transducers and Arrays. In Proceedings of the IEEE Ultrasonics Symposium, Rotterdam, The Netherlands, 18–21 September 2005; pp. 2247–2250.
- Warring, R.H.; Gibilisco, S. Fundamentals of Transducers; Tab Books: Blue Ridge Summit, PA, USA, 1985. [Google Scholar]
- Mulholland, A.J.; Walker, A.J. Piezoelectric Ultrasonic Transducers with Fractal Geometry. Fractals 2011, 19, 469–479. [Google Scholar] [CrossRef]
- Flint, J.A. A Biomimetic Antenna in the Shape of a Bat’s Ear. IEEE Antennas Wirel. Propag. Lett. 2006, 5, 145–147. [Google Scholar] [CrossRef] [Green Version]
- Robert, D.; Göpfert, M.C. Novel Schemes for Hearing and Orientation in Insects. Curr. Opin. Neurobiol. 2002, 12, 715–720. [Google Scholar] [CrossRef]
- Orr, L.-A.; Mulholland, A.J.; O’Leary, R.L.; Hayward, G. Analysis of Ultrasonic Transducers with Fractal Architecture. Fractals 2008, 16, 333–349. [Google Scholar] [CrossRef]
- Mulholland, A.J.; Mackersie, J.W.; O’Leary, R.L.; Gachagan, A.; Walker, A.J.; Ramadas, S.N. The Use of Fractal Geometry in the Design of Piezoelectric Ultrasonic Transducers. In Proceedings of the IEEE International Ultrasonics Symposium, Orlando, FL, USA, 18–21 October 2011; pp. 1559–1562.
- Algehyne, E.A.; Mulholland, A.J. A Finite Element Approach to Modelling Fractal Ultrasonic Transducers. IMA J. Appl. Math. 2015, 80, 1684–1702. [Google Scholar] [CrossRef]
- Jones, H. Computer Graphics through Key Mathematics; Springer: London, UK, 2001. [Google Scholar]
- Kent, A.; Williams, J.G. Encyclopedia of Computer Science and Technology; CRC Press: New York, NY, USA, 2001. [Google Scholar]
- Peitgen, H.-O.; Jürgens, H.; Saupe, D.; Maletsky, E.; Perciante, T.; Yunker, L. Fractals for the Classroom: Strategic Activities; Springer: New York, NY, USA, 2012; Volume 1. [Google Scholar]
- Yang, J. Analysis of Piezoelectric Devices; World Scientific: Singapore, 2006. [Google Scholar]
- Giona, M.; Schwalm, W.A.; Schwalm, M.K.; Adrover, A. Exact solution of Linear Transport Equations in Fractal Media—I. Renormalization Analysis and General Theory. Chem. Eng. Sci. 1996, 51, 4717–4729. [Google Scholar] [CrossRef]
- Giona, M.; Schwalm, W.A.; Adrover, A.; Schwalm, M.K. Analysis of Linear Transport Phenomena on Fractals. Chem. Eng. J. 1996, 64, 45–61. [Google Scholar] [CrossRef]
- Giona, M. Transport Phenomena in Fractal and Heterogeneous Media-Input/Output Renormalisation and Exact Results. Chaos Solitons Fract. 1996, 7, 1371–1396. [Google Scholar] [CrossRef]
- Fam, G.S.A.; Rashed, Y.F.; Katsikadelis, J.T. The Analog Equation Integral Formulation for Plane Piezoelectric Media. Eng. Anal. Bound. Elem. 2015, 51, 199–212. [Google Scholar] [CrossRef]
- Zhu, M.; Leighton, G. Dimensional Reduction Study of Piezoelectric Ceramics Constitutive Equations from 3-D to 2-D and 1-D. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2008, 55, 2377–2383. [Google Scholar] [PubMed]
- Malhotra, V.M.; Carino, N.J. Handbook on Nondestructive Testing of Concrete; CRC Press: Boca Raton, FL, USA, 2004. [Google Scholar]
- Nygren, M.W. Finite Element Modeling of Piezoelectric Ultrasonic Transducers. Master’s Thesis, Norwegian University of Science and Technology, Trondheim, Norway, 2011. [Google Scholar]
- Malhotra, V.M.; Carino, N.J. Ultrasonic Waves in Solid; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Fang, H.; Qiu, Z.; O’Leary, R.L.; Gachagan, A.; Mulholland, A.J. Improving the Operational Bandwidth of a 1–3 Piezoelectric Composite Transducer using Sierpinski Gasket Fractal Geometry. In Proceedings of the IEEE International Ultrasonics Symposium, Tours, France, 18–21 September 2016.
- Canning, S.; Walker, A.J.; Paul, P.A. The Effectiveness of a Sierpinski Carpet Inspired Transducer. Fractals 2016. submitted for publication. [Google Scholar]
- Schwalm, W.A.; Schwalm, M.K. Explicit Orbits for Renormalization Maps for Green Functions on Fractal Lattices. Phys. Rev. B 1996, 47, 7847–7858. [Google Scholar] [CrossRef]
- Gibbs, V.; Cole, D.; Sassano, A. Ultrasound Physics and Technology: How, Why, and When; Churchill Livingstone: London, UK, 2009. [Google Scholar]
- Schwalm, W.A.; Schwalm, M.K. Piezoelectric Composite Materials for Ultrasonic Transducer Application. Part II: Evaluation of Ultrasonic Medical Applications. IEEE T Son. Ultrason. 1985, 32, 499–513. [Google Scholar]
- Mulholland, A.J.; O’Leary, R.L.; Ramadas, S.N.; Parr, A.; Troge, A.; Pethrick, R.A.; Hayward, G. A Theoretical Analysis of a Piezoelectric Ultrasound Device with an Active Matching Layer. Ultrasonics 2007, 47, 102–110. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Graf, R.F. Modern Dictionary of Electronics; Newnes: Woburn, UK, 1999. [Google Scholar]
- Leigh, S.J.; Bradley, R.J.; Purssell, C.P.; Billson, D.R.; Hutchins, D.A. A Simple, Low-Cost Conductive Composite Material for 3D Printing of Electronic Sensors. PLoS ONE 2012, 7, e49365. [Google Scholar] [CrossRef] [PubMed]
- Woodward, D.I.; Purssell, C.P.; Billson, D.R.; Hutchins, D.A.; Leigh, S.J. Additively-manufactured piezoelectric devices. Phys. Status Solidi A 2015, 212, 2107–2113. [Google Scholar] [CrossRef]
- Leigh, S.J.; Purssell, C.P.; Billson, D.R.; Hutchins, D.A. Using a magnetite/thermoplastic composite in 3D printing of direct replacements for commercially available flow sensors. Smart Mater. Struct. 2014, 23, 095039. [Google Scholar] [CrossRef]
- Barlow, E.; Algehyne, E.A.; Mulholland, A.J. Investigating the Performance of a Fractal Ultrasonic Transducer Under Varying System Conditions. Symmetry 2016, 8, 1–30. [Google Scholar] [CrossRef] [Green Version]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Magnitude | Dimensions | |
|---|---|---|---|
| Elastic constant | N | ||
| Piezoelectric stress coefficient | C | ||
| Permittivity tensor element | - | ||
| Density | kg | ||
| Parallel electrical load | Ω | ||
| Series electrical load | 50 | Ω | |
| Fractal length | l | 1 | mm |
| Generation (n) | Amplitude (a) dB | Bandwidth (bw) MHz | Gain Bandwidth Product (gbp) MHz |
|---|---|---|---|
| 1 | |||
| 2 | |||
| 3 | |||
| 4 | |||
| 5 |
| Amplitude (a) dB | Bandwidth (bw) MHz | Gain Bandwidth Product (gbp) MHz | |
|---|---|---|---|
| Sierpinski Tetrix | |||
| Sierpinski Gasket | |||
| Euclidean |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Canning, S.; Walker, A.J.; Roach, P.A. A Mathematical Model of a Novel 3D Fractal-Inspired Piezoelectric Ultrasonic Transducer. Sensors 2016, 16, 2170. https://doi.org/10.3390/s16122170
Canning S, Walker AJ, Roach PA. A Mathematical Model of a Novel 3D Fractal-Inspired Piezoelectric Ultrasonic Transducer. Sensors. 2016; 16(12):2170. https://doi.org/10.3390/s16122170
Chicago/Turabian StyleCanning, Sara, Alan J. Walker, and Paul A. Roach. 2016. "A Mathematical Model of a Novel 3D Fractal-Inspired Piezoelectric Ultrasonic Transducer" Sensors 16, no. 12: 2170. https://doi.org/10.3390/s16122170
APA StyleCanning, S., Walker, A. J., & Roach, P. A. (2016). A Mathematical Model of a Novel 3D Fractal-Inspired Piezoelectric Ultrasonic Transducer. Sensors, 16(12), 2170. https://doi.org/10.3390/s16122170