
A Collaborative Secure Localization Algorithm Based on Trust Model in Underwater Wireless Sensor Networks





Abstract
:1. Introduction
2. Related Work
3. Collaborative Secure Localization Algorithm
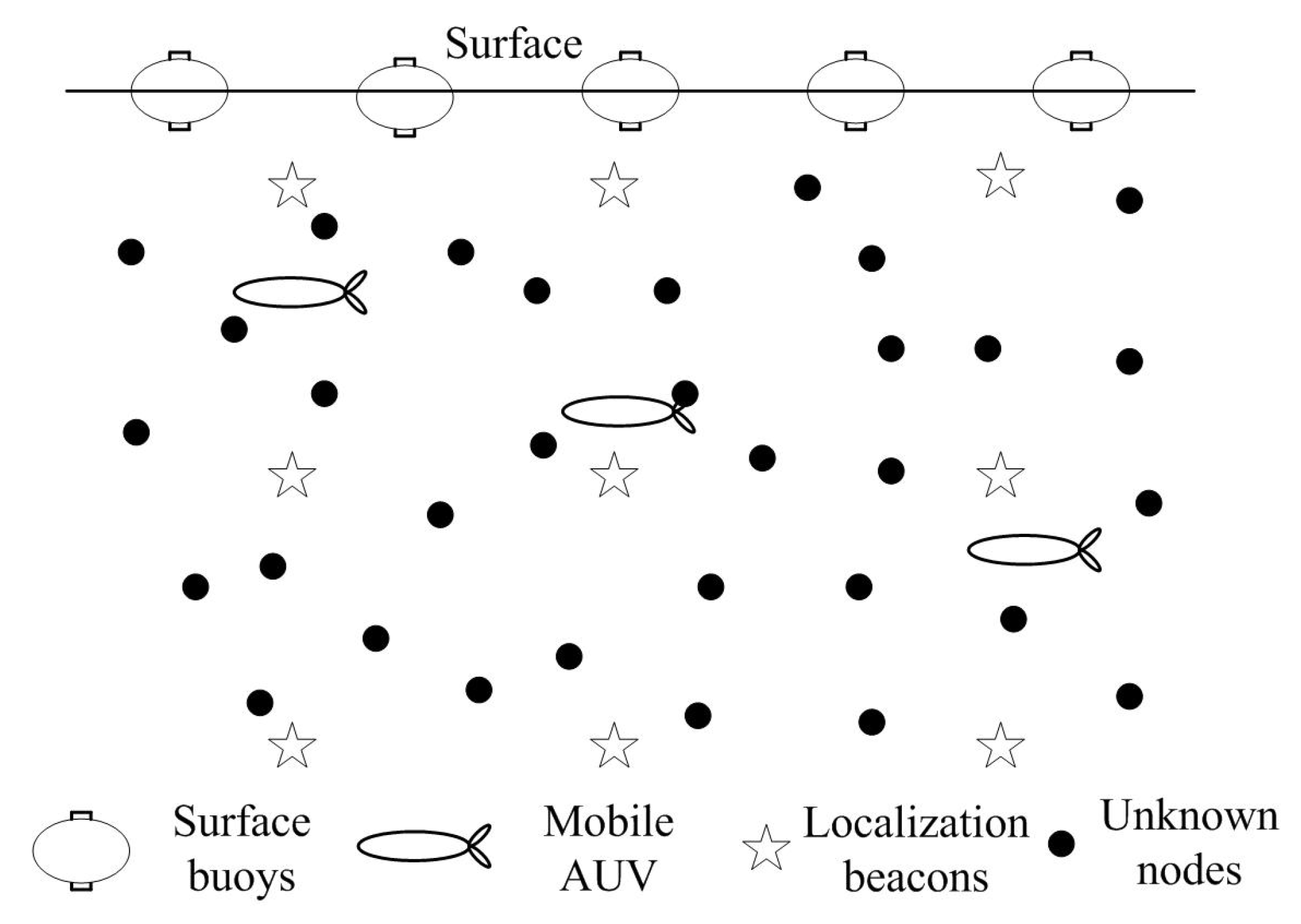
3.1. Network Model and Assumptions


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Layers | Attacks | Countermeasures | Attack Behaviors | Results |
|---|---|---|---|---|
| Physical Layer | Stealing | The perception mechanism for physical damage, encryption algorithm, etc. | Signal eavesdropping and tampering | packet error and packet loss |
| Jamming | Multi-frequency communication, using different transmission priority, etc. | Send jamming signal on the working frequency | packet loss | |
| Data Link Layer | Collision | Forward Error Correct (FEC) code. | Repeat to send messages | packet loss |
| Exhaustion | Limit the transmission speed and retransmission times of packets | Send a lot of useless messages | packet loss | |
| Unfairness | Avoid using long packets, redistributing transmission priority of packets, etc. | Deliberately take up the channel | packet loss | |
| Network Layer | DoS attacks | Detection of energy consumption | Repeatedly send many messages to exhaust energy | packet loss |
| Selective forwarding | Multi-path routing, reputation and trust model, etc. | Selectively forward packets | packet loss | |
| Sybil | Identity authentication of sensor nodes | Have multiple identities | packet error | |
| Wormhole | Construction of network topology | Shorten distance | packet error | |
| Sinkhole | Traffic monitoring, identity authentication, multi-path routing, etc. | Maliciously tamper with routing | packet loss | |
| Transport Layer | Flooding | Limit the broadcast range of sensor nodes | Establish false connections | packet loss |
| Tampering | Data encryption and node authentication. | Tampering localization beacons | packet error |
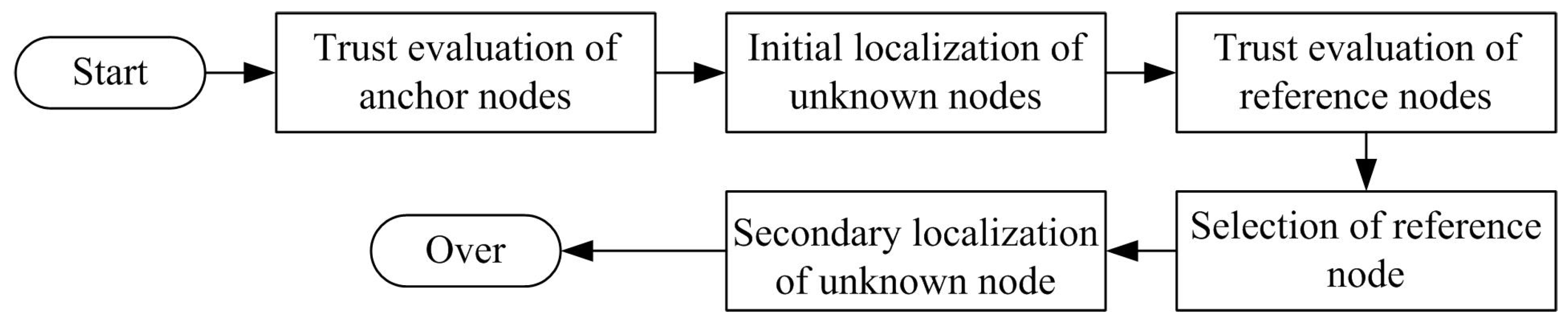
3.2. Overview of Secure Localization Algorithm CSLT

4. The Trust Evaluation Process

4.1. Trust Evidence Generation
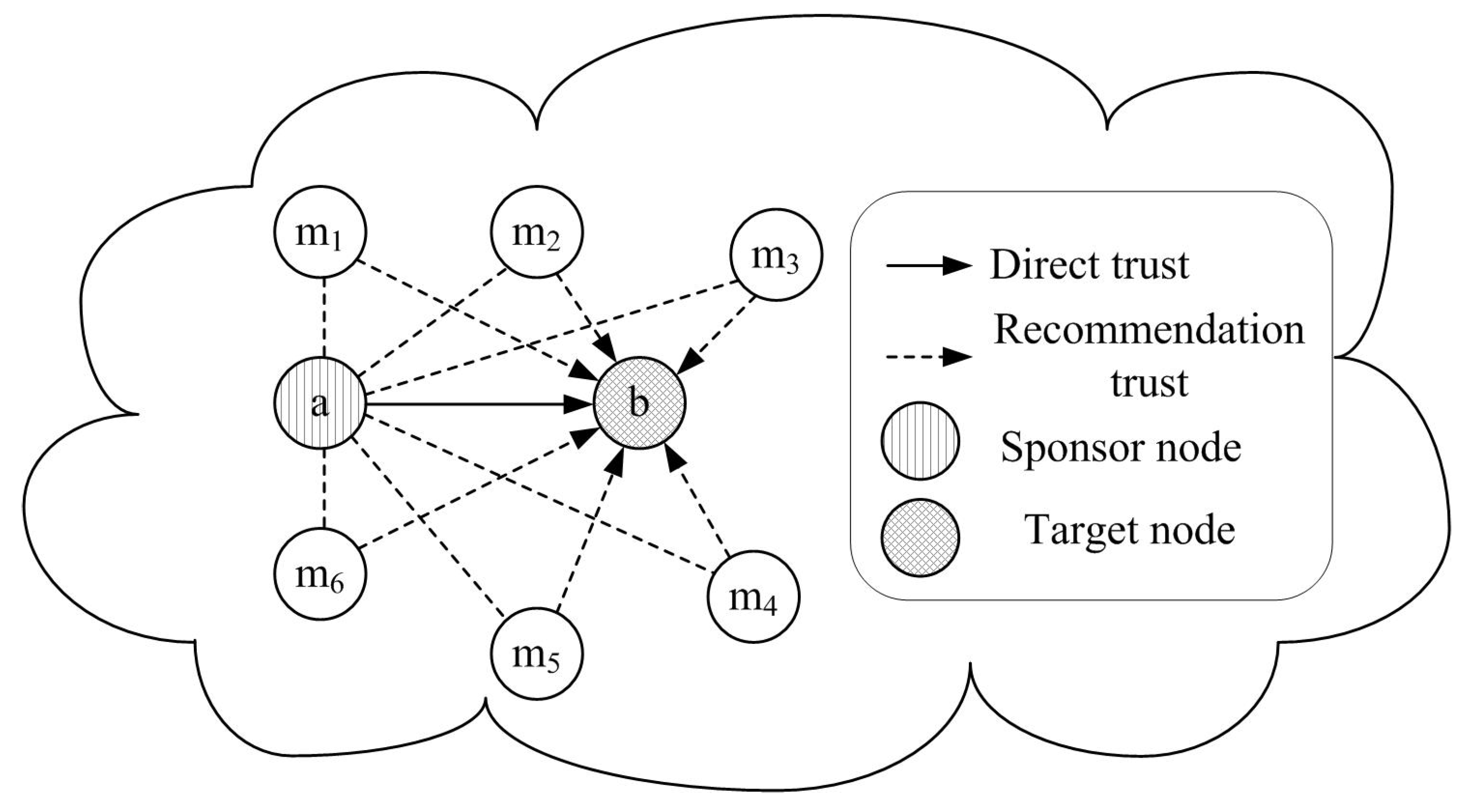
4.2. Trust Calculation for One-Hop Neighbor Nodes

4.2.1. Direct Trust Calculation for One-Hop Neighbor Nodes
- Step 1. Computing the mean value and the variance of , , .
- Step 2. Computing , .
- Step 3. Computing , .
- Step 4. Computing , .
4.2.2. Recommendation Trust Calculation for One-Hop Neighbor Nodes
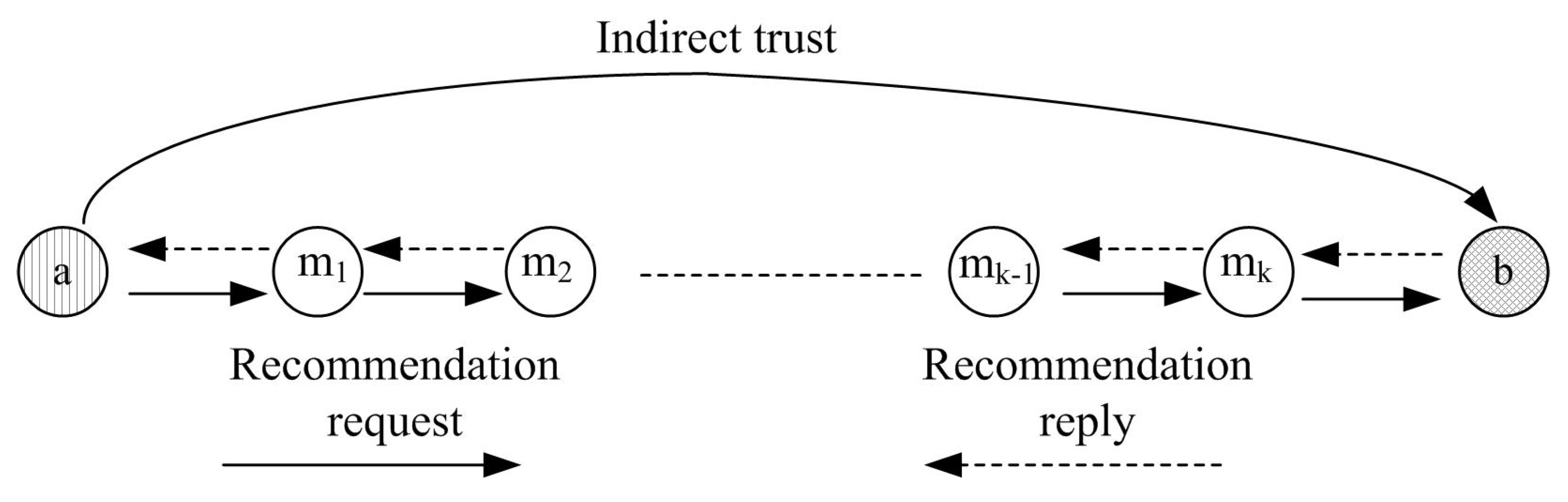
4.3. Trust Calculation for Two-Hop Neighbor Nodes

4.4. Trust Update
5. Simulation Results and Discussions
| Parameters | Value |
|---|---|
| Simulation region size | 500 m × 500 m × 500 m |
| The number of unknown nodes | 500 |
| Communication range | 100 m |
| Node placement | Randomly deployed |
| Initial trust value | 1 |
| Acoustic channel bandwidth | 100 Kbps |
| The modulation mode for acoustic communication | BPSK modulation |
| Mobility model | The Meandering Current Mobility (MCM) model |
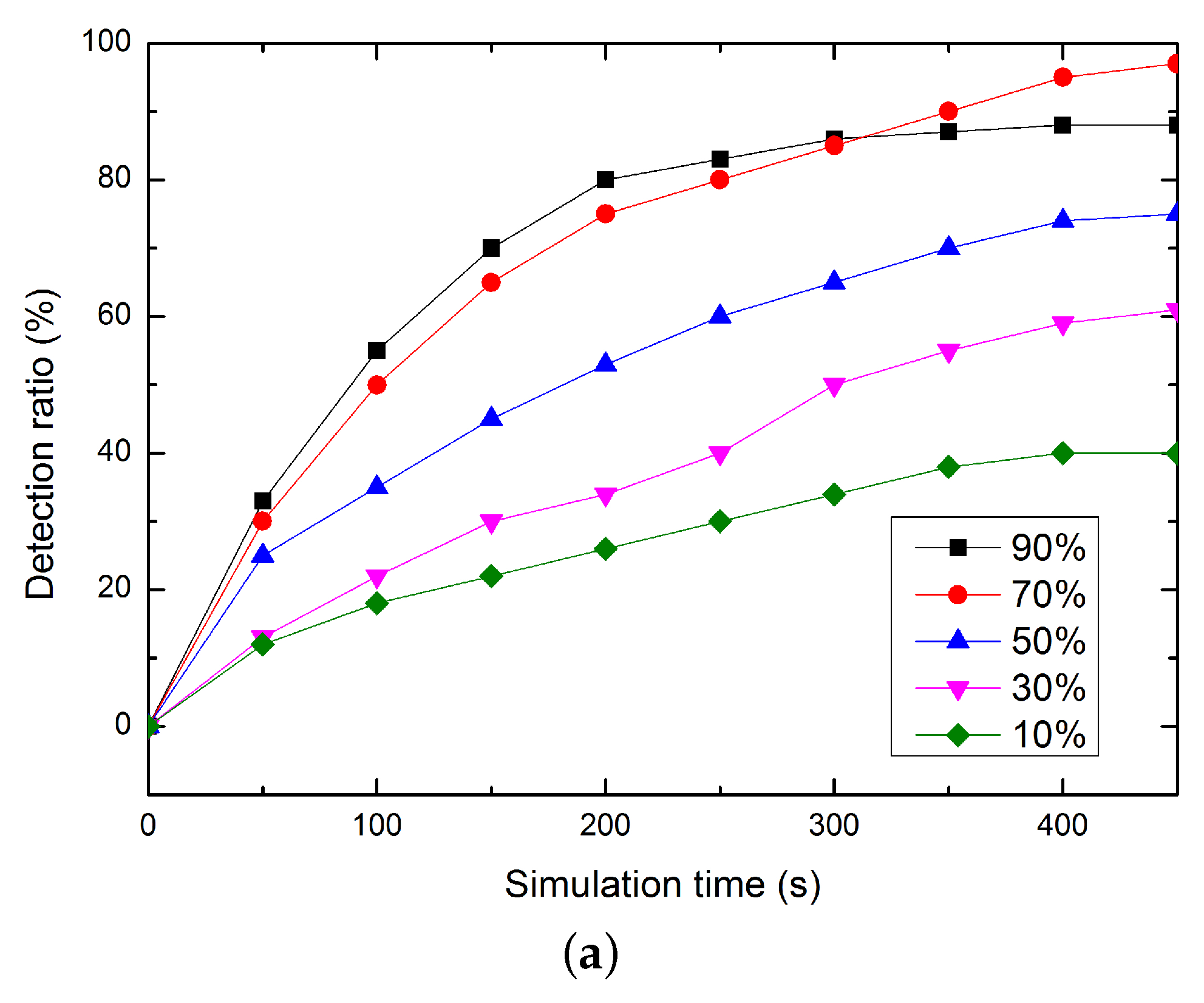
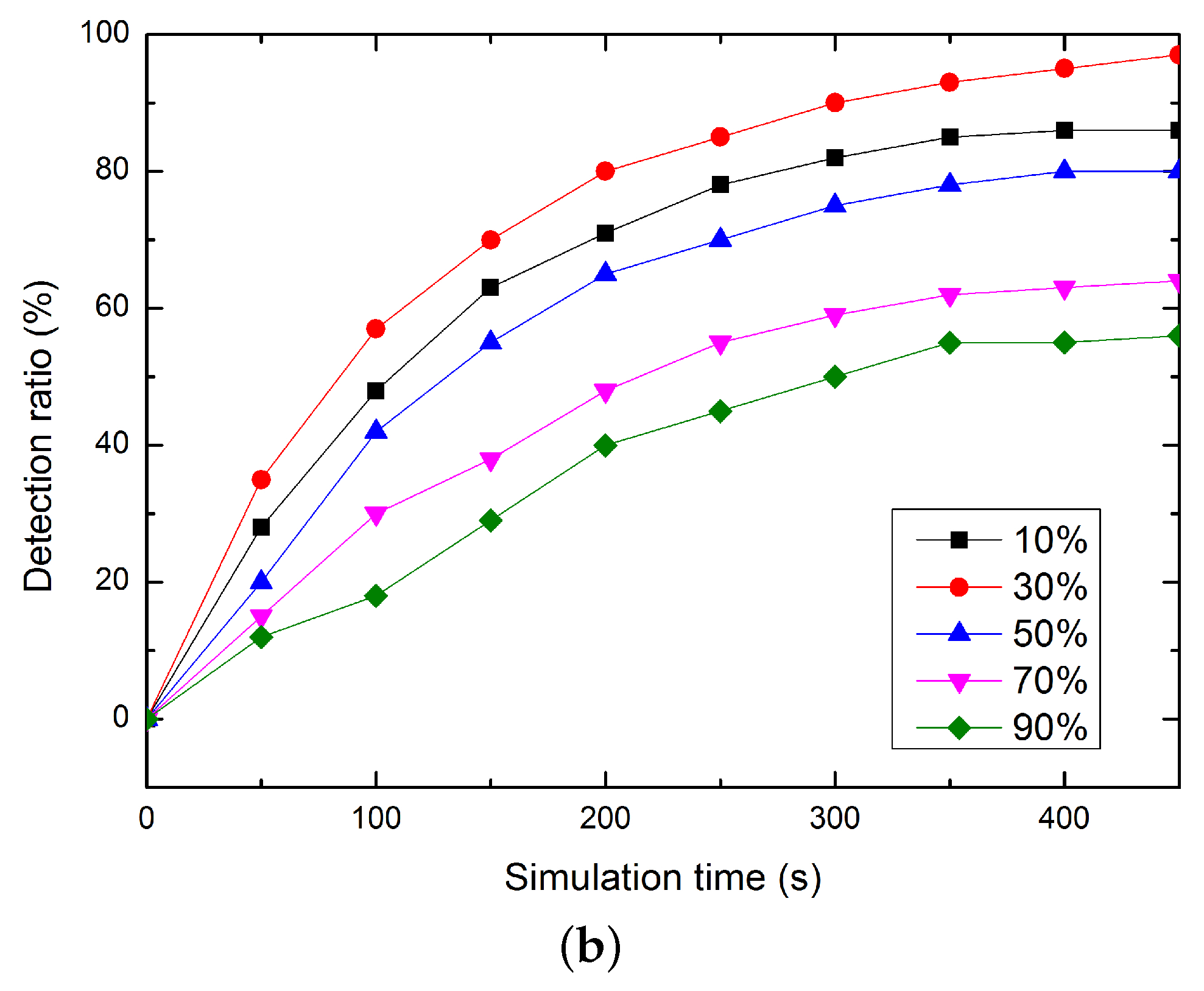
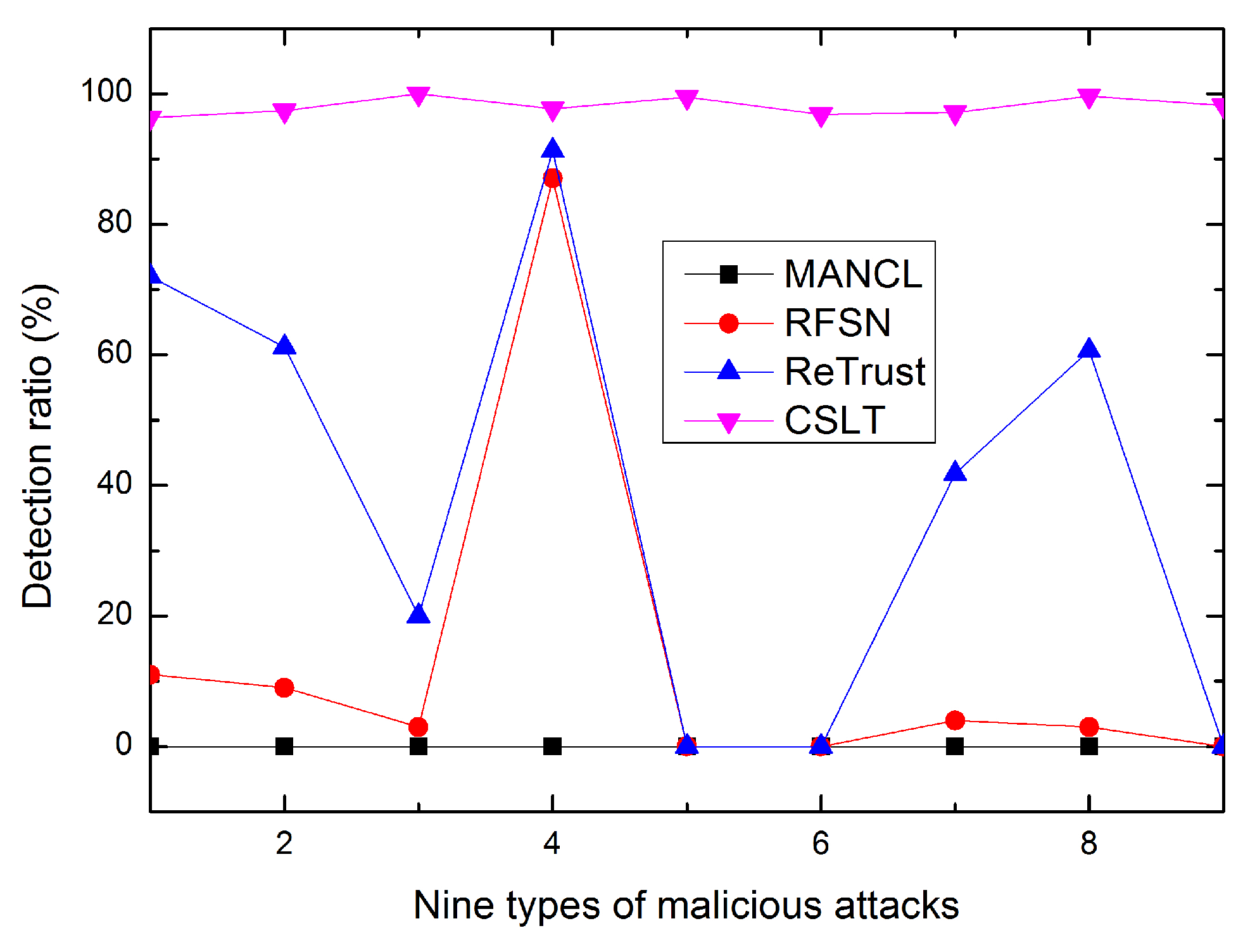
5.1. Comparison of Detect Ratio



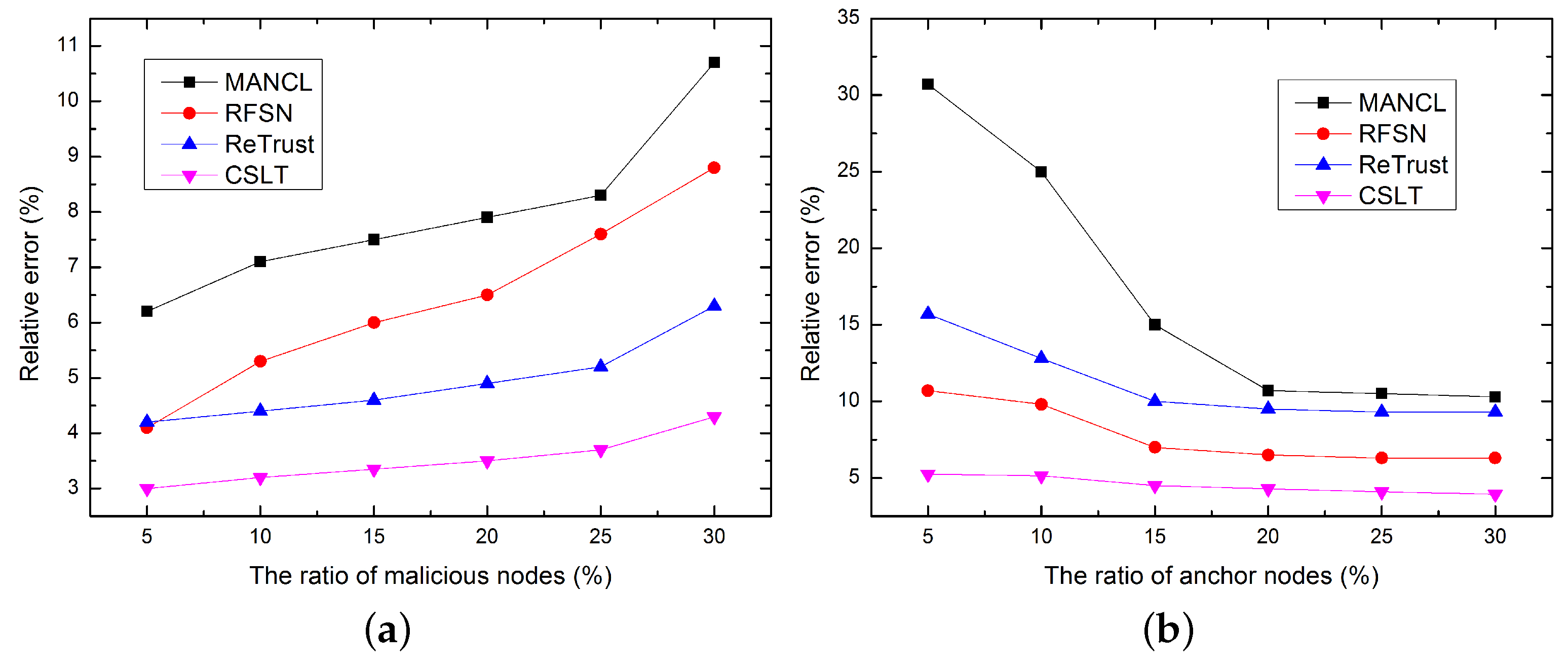
5.2. Comparison of Localization Accuracy

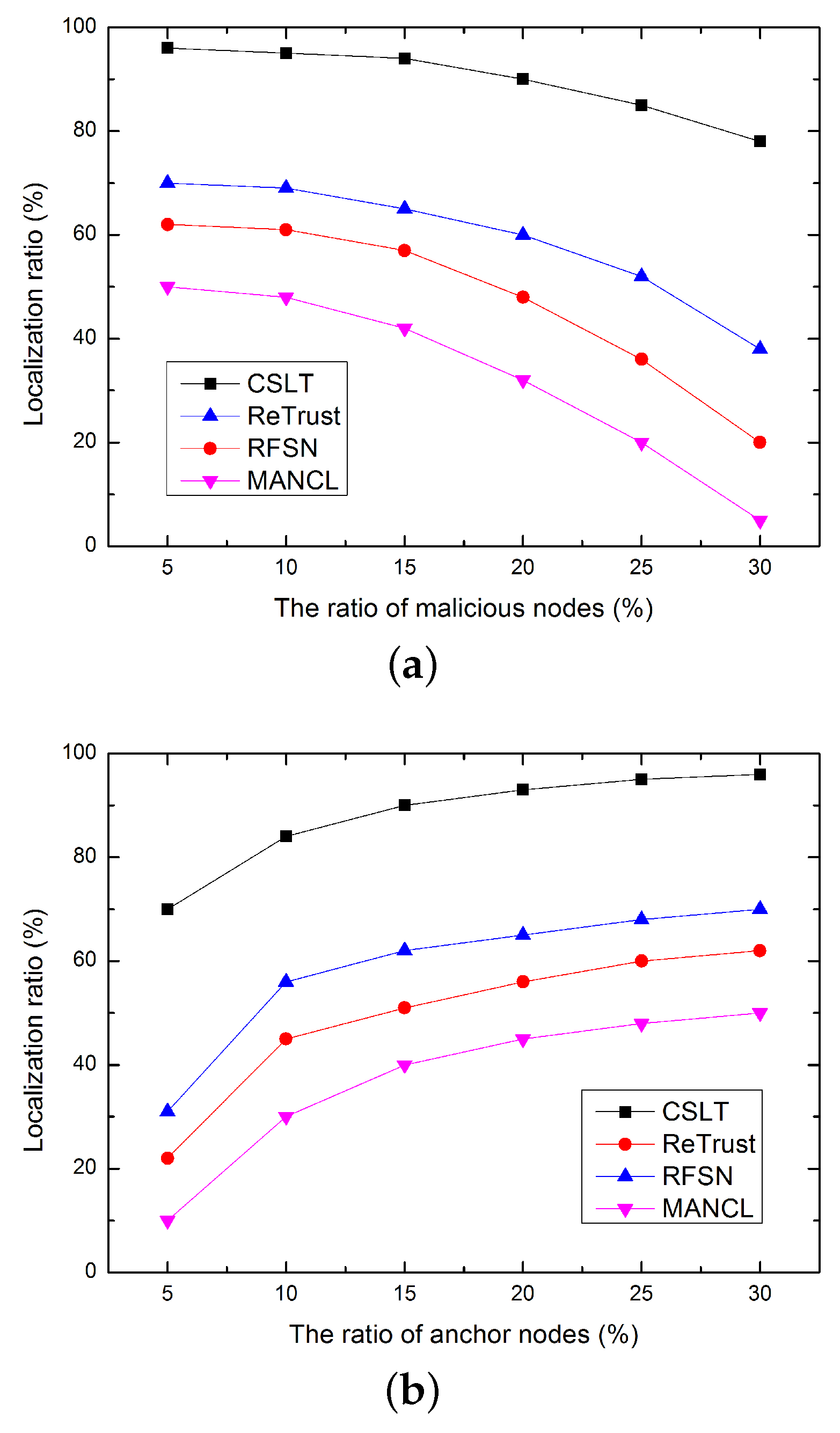
5.3. Comparison of Localization Ratio

5.4. Comparison of Energy Consumption

6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Erol-Kantarci, M.; Mouftah, H.T.; Oktug, S. A survey of architectures and localization techniques for underwater acoustic sensor. IEEE Commun. Surv. Tutor. 2011, 13, 487–502. [Google Scholar] [CrossRef]
- Tan, H.; Diamant, R.; Seah, W.K.G.; Waldmeyer, M. A survey of techniques and challenges in underwater localization. Ocean Eng. 2011, 38, 1663–1676. [Google Scholar] [CrossRef]
- Han, G.; Jiang, J.; Shu, L.; Xu, Y.; Wang, F. Localization algorithms of underwater wireless sensor networks: A survey. Sensors 2012, 12, 2026–2061. [Google Scholar] [CrossRef] [PubMed]
- Omar, M.; Challal, Y.; Bouabdallah, A. Certification-based trust models in mobile ad hoc networks: A survey and taxonomy. J. Netw. Comput. Appl. 2012, 35, C268–C286. [Google Scholar] [CrossRef]
- Sherchan, W.; Nepal, S.; Paris, C. A survey of trust in social networks. ACM Comput. Surv. (CSUR) 2013, 45, 1–33. [Google Scholar] [CrossRef]
- Chandrasekhar, V.; Seah, W.K. An Area Localization Scheme for Underwater Sensor Networks. In Proceedings of the IEEE 61st Vehicular Technology Conference, Stockholm, Sweden, 30 May–1 June 2005; pp. 2835–2839.
- Cheng, X.; Shu, H.; Liang, Q. A Range-Difference Based Self-Positioning Scheme for Underwater Acoustic Sensor Networks. In Proceedings of the International Conference on Wireless Algorithms, Systems and Applications (WASA), Chicago, IL, USA, 1–3 August 2007; pp. 38–43.
- Cheng, X.; Shu, H.; Liang, Q.; Du, D.H. Silent positioning in underwater acoustic sensor networks. IEEE Trans. Vehicul. Technol. 2008, 57, 1756–1766. [Google Scholar] [CrossRef]
- Teymorian, A.Y.; Cheng, W.; Ma, L.; Cheng, X. Poster Abstract: An Underwater Positioning Scheme for 3D Acoustic Sensor Networks. Available online: http://wuwnet07.engr.uconn.edu/wipposters/WUWNet07-Teymorian-1.pdf (accessed on 10 February 2012).
- Cheng, W.; Teymorian, A.Y.; Ma, L.; Cheng, X.; Lu, X.; Lu, Z. Underwater Localization in Sparse 3D Acoustic Sensor Networks. In Proceedings of the 27th IEEE Conference on Computer Communications, Phoenix, AZ, USA, 13–18 April 2008; pp. 236–240.
- Teymorian, A.Y.; Cheng, W.; Ma, L.; Cheng, X.; Lu, X.; Lu, Z. 3D underwater sensor network localization. IEEE Trans. Mob. Comput. 2009, 5, 1610–1621. [Google Scholar] [CrossRef]
- Cheng, W.; Thaeler, A.; Cheng, X.; Liu, F.; Lu, X.; Lu, Z. Time-Synchronization Free Localization in Large Scale Underwater Acoustic Sensor Networks. In Proceedings of the 29th IEEE International Conference on Distributed Computing Systems Workshops, Montreal, QC, Canada, 22–26 June 2009; pp. 80–87.
- Mirza, D.; Schurgers, C. Collaborative localization for fleets of underwater drifters. In Proceedings of the OCEANS, Vancouver, BC, Canada, 29 September–4 October 2007; pp. 1–6.
- Erol, M.; Vieira, L.F.M.; Gerla, M. Localization with Dive’N’Rise (DNR) Beacons for Underwater Acoustic Sensor Networks. In Proceedings of the 2nd Workshop on Underwater Networks, Montreal, QC, Canada, 9–14 September 2007; pp. 97–100.
- Erol, M.; Vieira, L.F.M.; Caruso, A.; Paparella, F.; Gerla, M.; Oktug, S. Multi Stage Underwater Sensor Localization using Mobile Beacons. In Proceedings of the 2nd International Conference on Sensor Technologies and Applications, Cap Esterel, France, 25–31 August 2008; pp. 25–31.
- Erol, M.; Vieira, L.F.M.; Gerla, M. AUV-Aided Localization for Underwater Sensor Networks. In Proceedings of the International Conference on Wireless Algorithms, Systems and Applications (WASA), Chicago, IL, USA, 1–3 August 2007; pp. 44–54.
- Waldmeyer, M.; Tan, H.P.; Seah, W.K.G. Multi-Stage AUV-Aided Localization for Underwater Wireless Sensor Networks. In Proceedings of the 2011 IEEE Workshops of International Conference on Advanced Information Networking and Applications (WAINA), Singapore, 22–25 March 2011; pp. 908–913.
- Waldmeyer, M.; Tan, H.P.; Seah, W.K.G. A Hierarchical Localization Scheme for Large Scale Underwater Wireless Sensor Networks. In Proceedings of the 11th IEEE International Conference on High Performance Computing and Communications, Seoul, Korea, 25–27 June 2009; pp. 470–475.
- Lee, S.; Kim, K. Localization with a Mobile Beacon in Underwater Sensor Networks. In Proceedings of the IEEE/IFIP 8th International Conference on Embedded and Ubiquitous Computing (EUC), Hong Kong, China, 11–13 December 2010; pp. 316–319.
- Luo, H.; Zhao, Y.; Guo, Z.; Liu, S.; Chen, P.; Li, L.M. UDB: Using Directional Beacons for Localization in Underwater Sensor Networks. In Proceedings of the 14th IEEE International Conference on Parallel and Distributed Systems (ICPADS), Melbourne, Australia, 8–10 December 2008; pp. 551–558.
- Luo, H.; Guo, Z.; Dong, W.; Hong, F.; Zhao, Y. LDB: Localization with directional beacons for sparse 3D underwater acoustic sensor networks. J. Netw. 2010, 5, 28–38. [Google Scholar] [CrossRef]
- Liu, J.; Wang, Z.; Zuba, M.; Peng, Z.; Cui, J.; Zhou, S. JSL: Joint Time Synchronization and Localization Design with Stratification Compensation in Mobile Underwater Sensor Networks. In Proceedings of the 9th Annual IEEE Communications Society Conference on Sensor, Mesh and Ad Hoc Communications and Networks (SECON), Seoul, Korea, 18–21 June 2012; pp. 317–325.
- Diamant, R.; Lampe, L. Underwater Localization with Time-Synchronization and Propagation Speed Uncertainties. IEEE Trans. Mob. Comput. 2013, 12, 1257–1269. [Google Scholar] [CrossRef]
- Diamant, R.; Tan, H.; Lampe, L. LOS and NLOS Classification for Underwater Acoustic Localization. IEEE Trans. Mob. Comput. 2014, 13, 311–323. [Google Scholar] [CrossRef]
- Guop, Y. Localization for Active-Restricted 3D Underwater Sensor Networks. J. Softw. 2013, 24, 33–40. [Google Scholar]
- Kim, S.; Yoo, Y. SLSMP: Time Synchronization and Localization Using Seawater Movement Pattern in Underwater Wireless Networks. Int. J. Distrib. Sens. Netw. 2014. [Google Scholar] [CrossRef]
- Han, G.; Xu, H.; Jiang, J.; Shu, L.; Hara, T. Path Planning using a Mobile Anchor Node based on Triangulation in Wireless Sensor Networks. Wirel. Commun. Mob. Comput. 2013, 13, 1324–1336. [Google Scholar] [CrossRef]
- Tan, Y.; Gao, R.; Chitre, M. Cooperative Path Planning for Range-Only Localization Using a Single Moving Beacon. IEEE J. Ocean Eng. 2014, 39, 371–385. [Google Scholar] [CrossRef]
- Han, G.; Zhang, C.; Liu, T.; Shu, L. MANCL: A multi-anchor nodes collaborative localization algorithm for underwater acoustic sensor networks. Wirel. Commun. Mob. Comput. 2014. [Google Scholar] [CrossRef]
- Liu, D.; Ning, P.; Du, W. Detecting malicious beacon nodes for secure location discovery in wireless sensor networks. In Proceedings of the 25th IEEE International Conference on Distributed Computing Systems, Columbus, OH, USA, 6–10 June 2005; pp. 609–619.
- He, D.; Chen, C.; Chan, S.; Bu, J.; Vasilakos, A.V. ReTrust: Attack-Resistant and Lightweight Trust Management for Medical Sensor Networks. IEEE Trans. Inf. Technol. Biomed. 2012, 16, 623–632. [Google Scholar] [PubMed]
- Han, G.; Jiang, J.; Shu, L.; Niu, J.; Chao, H. Management and applications of trust in Wireless Sensor Networks: A survey. J. Comput. Syst. Sci. 2014, 80, 602–617. [Google Scholar] [CrossRef]
- Caruso, A.; Paparella, F.; Vieira, L.; Erol, M.; Gerla, M. The Meandering Current Mobility Model and its Impact on Underwater Mobile Sensor Networks. In Proceedings the 27th Conference on Computer Communications, the INFOCOM 2008, Phoenix, AZ, USA, 13–18 April 2008; pp. 1–9.
- Ganeriwal, S.; Balzano, L.K.; Srivastava, M.B. Reputation-based framework for high integrity sensor networks. In Proceedings of the 2nd ACM Workshop on Security of Adhoc and Sensor Networks, Washington, DC, USA, 25–29 October 2004; pp. 66–77.
- Li, D.; Liu, C.; Du, Y.; Han, X.; Chao, H. Artificial Intelligence with Uncertainty. J. Softw. 2004, 15, 1583–1594. [Google Scholar]
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, G.; Liu, L.; Jiang, J.; Shu, L.; Rodrigues, J.J.P.C. A Collaborative Secure Localization Algorithm Based on Trust Model in Underwater Wireless Sensor Networks. Sensors 2016, 16, 229. https://doi.org/10.3390/s16020229
Han G, Liu L, Jiang J, Shu L, Rodrigues JJPC. A Collaborative Secure Localization Algorithm Based on Trust Model in Underwater Wireless Sensor Networks. Sensors. 2016; 16(2):229. https://doi.org/10.3390/s16020229
Chicago/Turabian StyleHan, Guangjie, Li Liu, Jinfang Jiang, Lei Shu, and Joel J.P.C. Rodrigues. 2016. "A Collaborative Secure Localization Algorithm Based on Trust Model in Underwater Wireless Sensor Networks" Sensors 16, no. 2: 229. https://doi.org/10.3390/s16020229
APA StyleHan, G., Liu, L., Jiang, J., Shu, L., & Rodrigues, J. J. P. C. (2016). A Collaborative Secure Localization Algorithm Based on Trust Model in Underwater Wireless Sensor Networks. Sensors, 16(2), 229. https://doi.org/10.3390/s16020229