
Measurement and Modeling of Narrowband Channels for Ultrasonic Underwater Communications

 ,
,  ,
,
Abstract
:
1. Introduction
2. Channel Characterization for UAC
- Attenuation: In UAC channels the attenuation is, in general terms, much higher than in terrestrial radio frequency (RF) channels and strongly depends on frequency and distance. Empirical formulas to predict the path loss, or mean attenuation, are available in the literature [12]. The mechanisms responsible for the path loss are basically signal absorption (part of the signal energy is transferred to the medium) and signal spreading (which depends on the geometry of propagation). Absorption increases rapidly with frequency, while spreading does with distance, yielding a limited range and limited bandwidth channel.
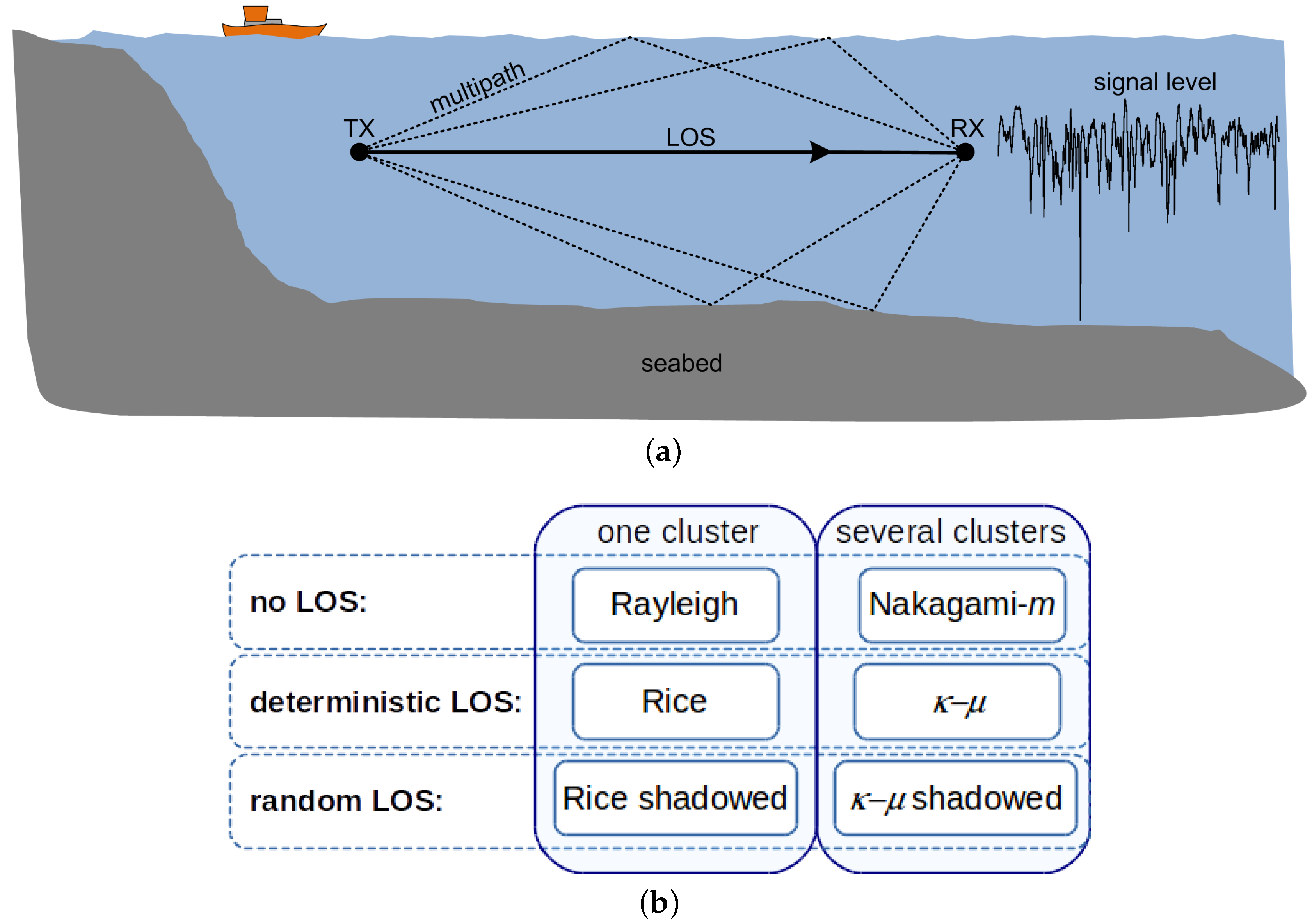
- Distortion: This is due to multipath propagation and fading. Multipath propagation in shallow UAC is caused by the reflections of the acoustic signal on the seabed, the surface of the sea and any other objects, and the different paths undergo different delays at reception that result in a dispersion in time (it can also be seen as the superposition of constructive and destructive contributions selective in frequency) [3]. A common way to characterize the time dispersion of the channel, or its frequency selectivity, is by evaluating parameters like the coherence bandwidth or the delay spread, which is several orders of magnitude higher than those measured in RF channels [13] due to the relatively low speed of sound in water. A typical propagation scenario is shown in Figure 1a, where a main component (line of sight (LOS)) is represented along with various multipath components. This multipath scenario is not static, but varies with time due to several factors, like surface waves (that change the reflection angles of the multipath components), internal waves, the motion of transmitter/receiver, changes in the medium physical conditions, etc. The time variation results in a fluctuation of the received signal level, the so-called fading. This fluctuation may also be experienced by the LOS component, a phenomenon referred to as shadowing. A simple way to characterize the time variation is directly, through the coherence time, or indirectly, through the Doppler spread, which measures the frequency broadening. This effect can be remarkably intense in UAC due, again, to the relatively low speed of sound in water.
UAC Fading Models Review
- Nakagami-m distribution: This is another generalization of the Rayleigh distribution, but considering the case where m clusters of multipath waves propagate in a non-homogeneous environment and arrive at the receiver with no main components within each cluster (strictly speaking, only for a cluster without reflections, the main component represents a LOS path; for the remaining clusters, with some reflections, the main component corresponds to the ray tracing for the reflected path). The envelope of each cluster signal is hence considered Rayleigh distributed. Nakagami-m with is Rayleigh [16].
- κ-μ distribution: This consists of a generalization of the Nakagami-m distribution where a non-fluctuating main component is considered within each cluster [17]. Actually, the κ-μ distribution is a generalization of the three previous distributions. Nakagami-m is approached if the level of the LOS components tends to zero. Rice is obtained if the number of clusters is set to one, and Rayleigh is obtained if both particularizations are simultaneously assumed.
- K distribution: This is a mixture of Gamma and Rayleigh distributions. The underlying mechanism for signal fluctuation that leads to this distribution is not clear (a question may arise about if some of the models can be regarded (entirely or partially) as merely fitting functions) [18].
- Rice shadowed distribution: This represents a generalization of the Rice distribution where the main component is assumed to be a random Nakagami-m variable [19]. It models the case where the LOS component experiences shadowing.
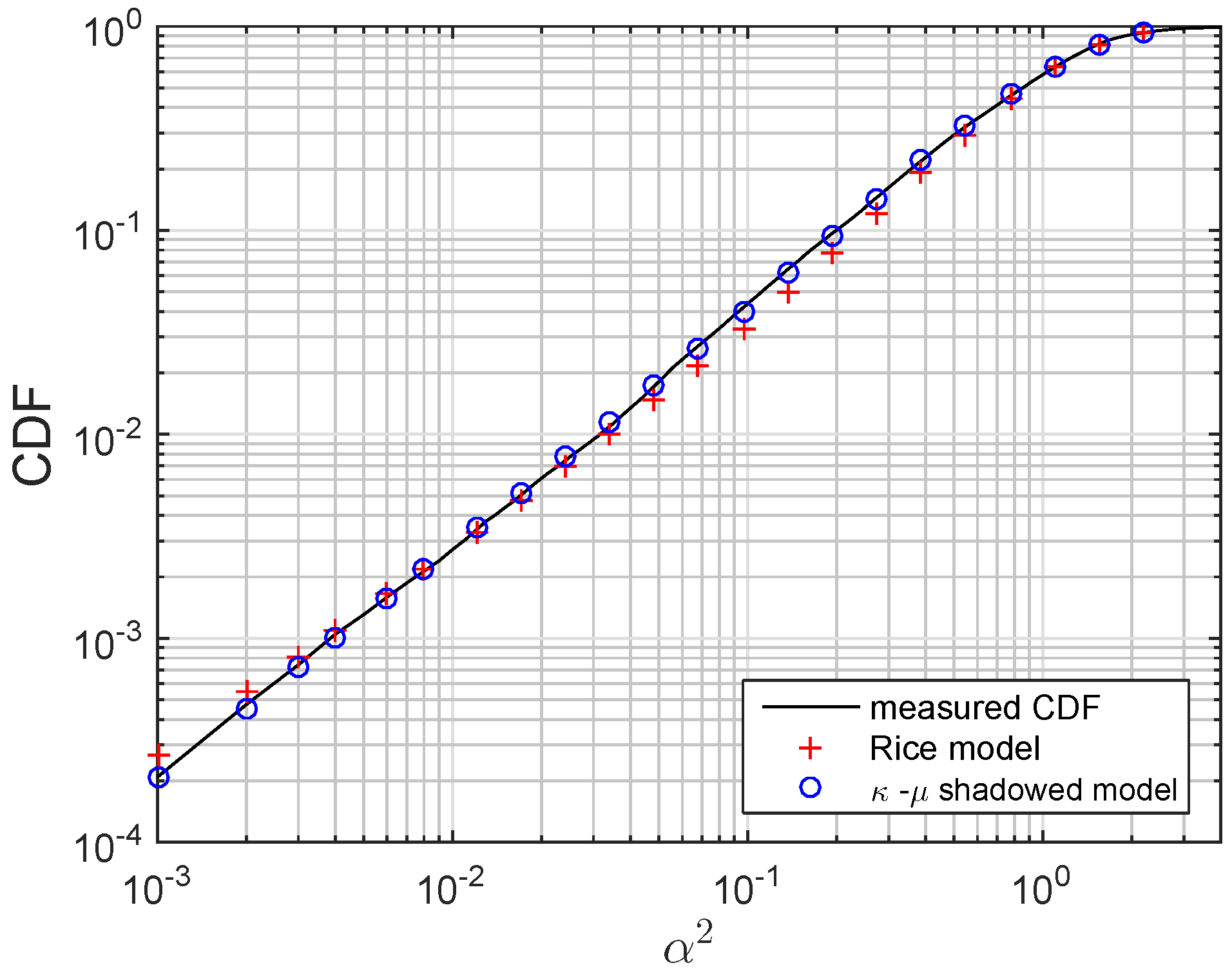
- κ-μ shadowed distribution: This is a generalization of the κ-μ distribution where the main components are considered Nakagami-m random variables. This distribution includes Rayleigh, Rice, Rice shadowed, Nakagami-m and κ-μ as particular cases. A better behavior of the κ-μ shadowed model over the rest has been addressed in [20] for UAC.
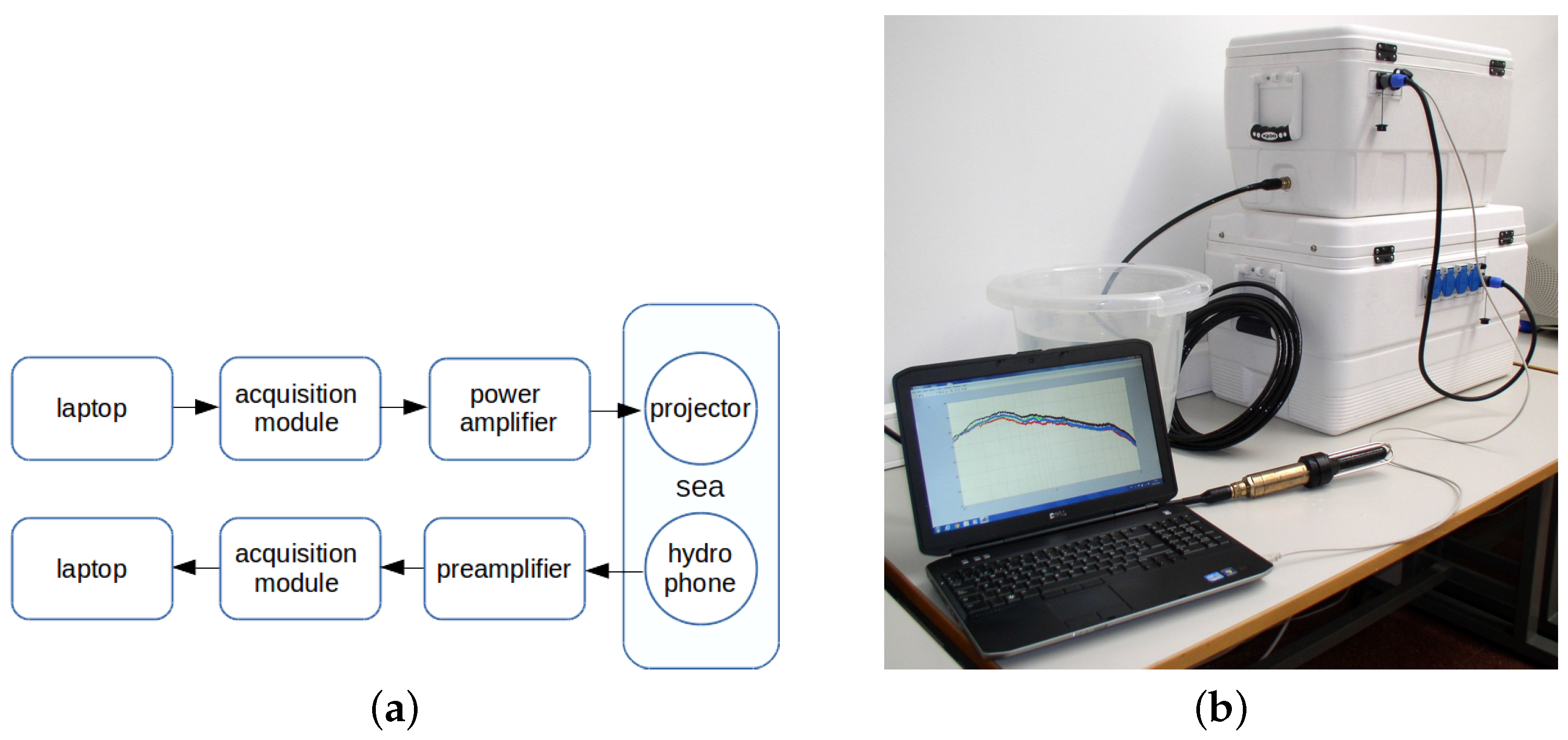
3. Ultrasonic Measurements for UAC
3.1. Channel Measurements Procedure
3.2. Measurement Results
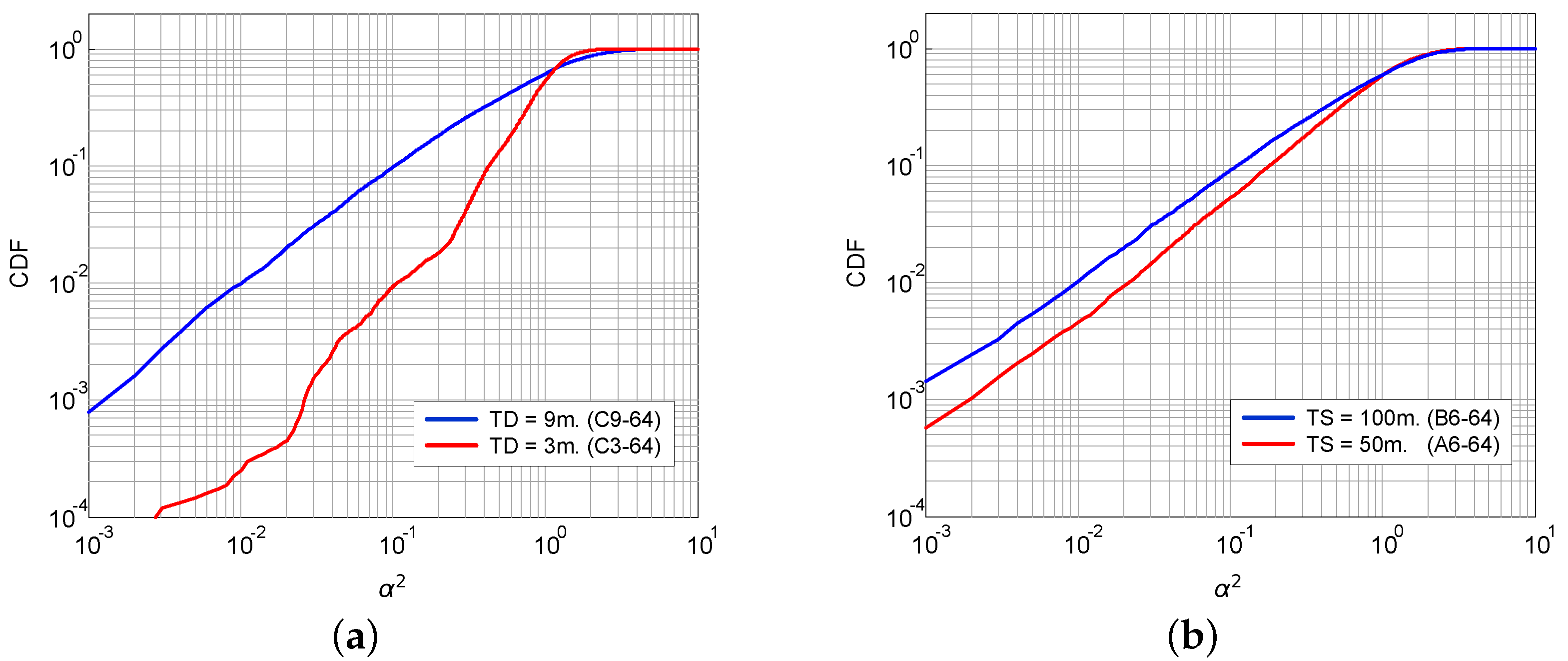
- Channel attenuation. This parameter is an estimation, using short time averaging, of the instantaneous attenuation (the inverse of the channel gain) measured from the registered data (not to be confused with path loss). The change in the channel gain produced by the fading is evaluated from the measurements. The range of values observed in the channel attenuation is shown in Table 2 for each group of measurements: i.e., channels with the A code (TS = 50 m), B code (TS = 100 m) and C code (TS = 200 m).
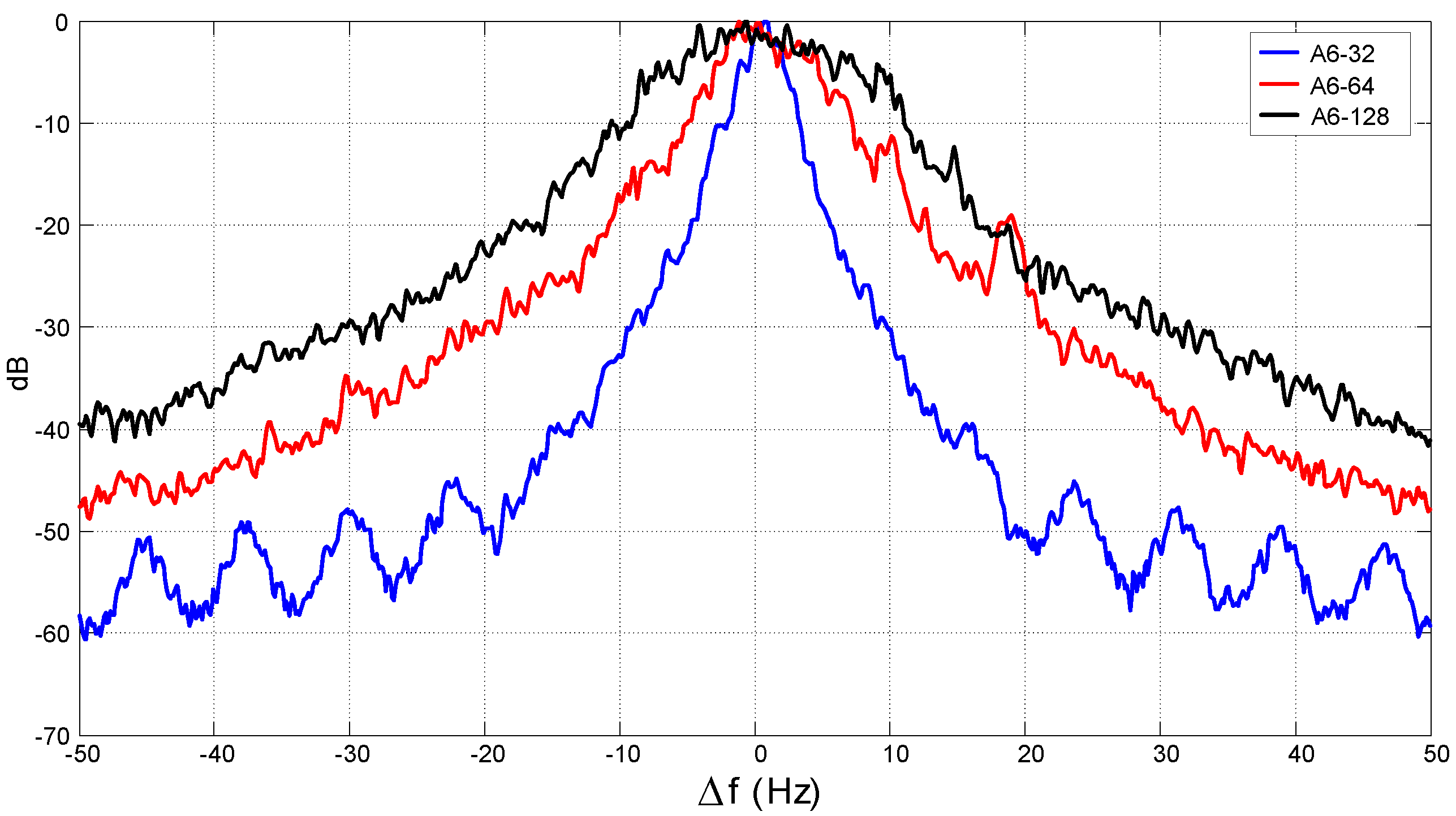
- Coherence time / Doppler spread: The small time scale variation of the underwater environment produces a variant shift of the received signal frequency due to the Doppler effect. A way of quantizing the variation of the channel is through the Doppler spread, defined as the rms (root mean square) bandwidth [13] of the received signal spectrum when a pure tone is transmitted (the so-called Doppler spectrum). An alternative parameter is the coherence time, which is inversely proportional to the Doppler spread. It measures the period over which the channel can be considered time invariant. Different criteria are considered in the literature to determine the inverse proportionality constant between both parameters. The one selected here yields the relation coherence time = 0.2/Doppler spread [13]. In Figure 4, the Doppler spectra measured in Channels A6-32, A6-64 and A6-128 are shown. The values obtained for the coherence time and Doppler spread for each channel are listed in Table 2.
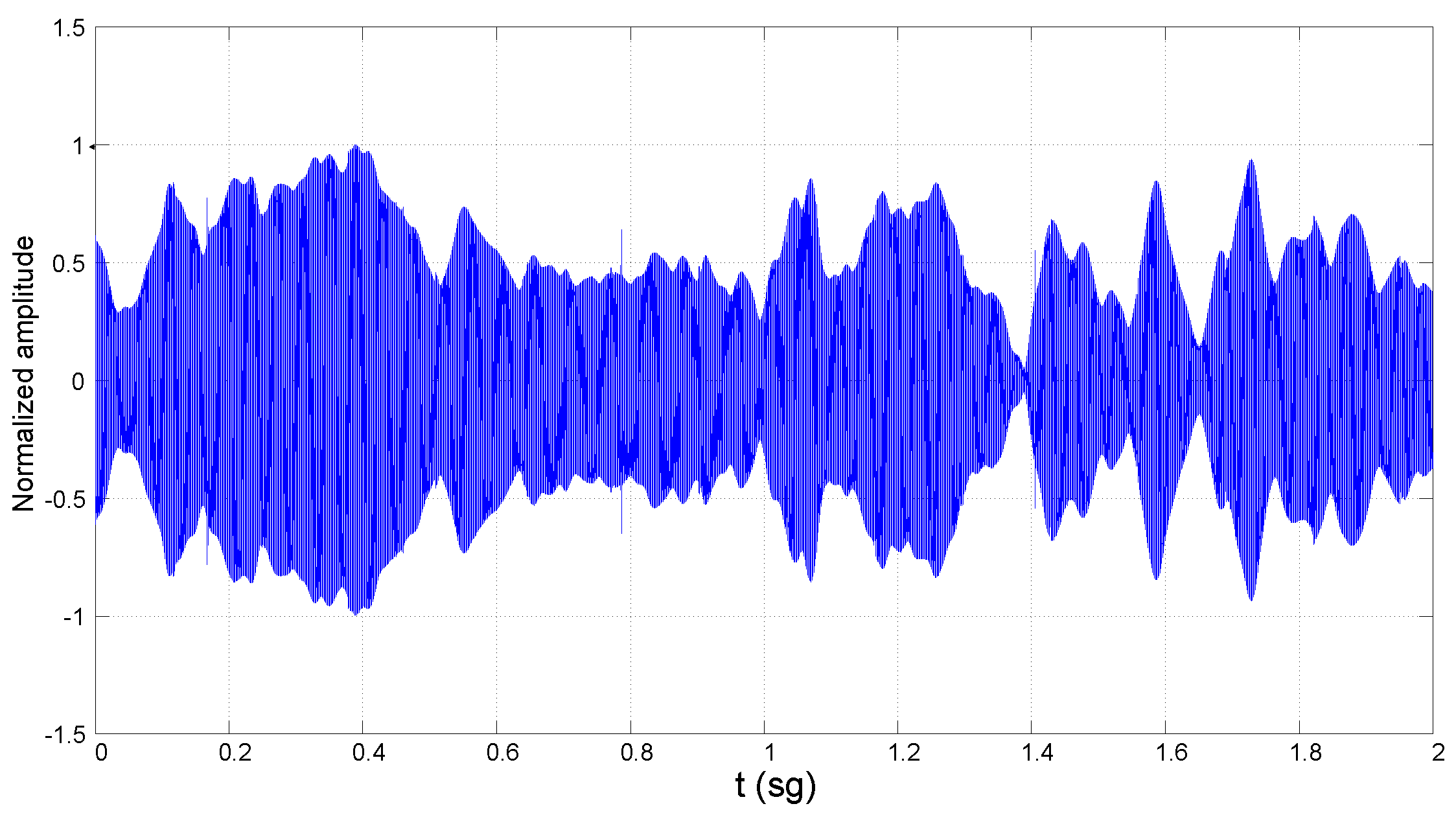
- Fading statistics: Fading has been characterized by measuring the fluctuations on the channel power gain, , from the fluctuations of the received signal envelope (see Figure 3). The samples of the channel gain α are assumed random, stationary and ergodic. The amount of fading (AoF) is defined as the dispersion in the distribution of , i.e., the variance divided by the mean square [15]. A normalization of is carried out before data processing, so that and, hence, AoF can be directly related to the variance. The collected channel gain samples are afterwards processed to obtain the cumulative distribution function (CDF) of the channel power gain.The procedure to estimate the fading does not avoid some in-band noise; however, noise was also registered alone at the measurement location, and the signal to noise ratio obtained at the output of the signal processing algorithms was larger than 30 dB in the worst conditions (for a center frequency of 128 kHz and link distance of 200 m); these results allow one to disregard the noise influence on the estimated fading CDF.
4. Ultrasonic Fading Modeling for UAC
4.1. κ-μ Shadowed Distribution
- m-parameter: All of the main components exhibit a common shadowing fluctuation that is represented by a Nakagami-m random variable with shaping parameter m.
- μ-parameter: This represents the number of clusters. Although the number of clusters should be a natural positive number, the parameter μ is allowed to take any non-negative real value, which leads to a more general and flexible distribution.
- κ-parameter: This represents the ratio between the total power of the main components and the total power of the scattered waves. The main components are also called dominant components, but in the case of κ less than one, the term dominant may be confusing.
4.2. Model Parameters Estimation
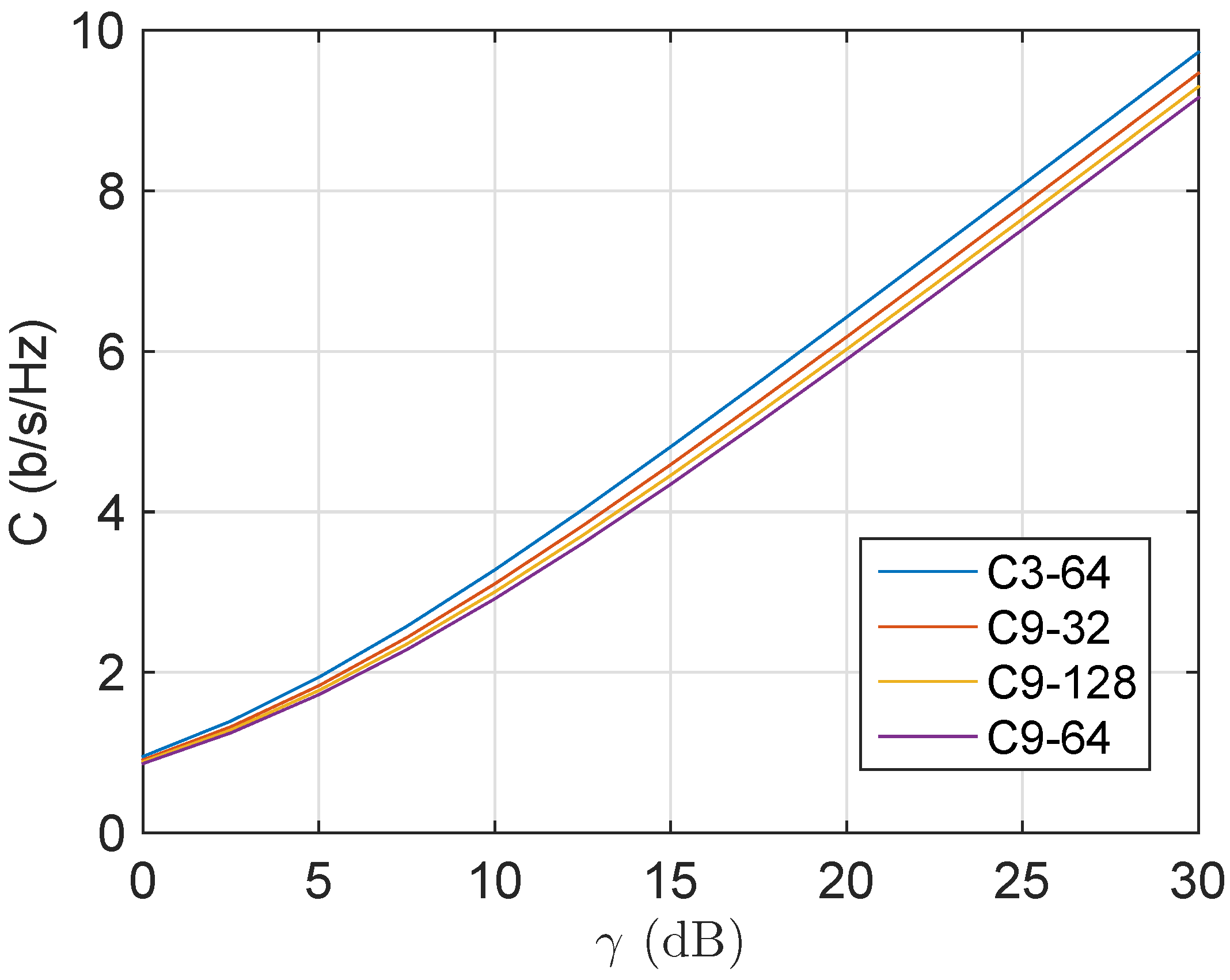
5. Analysis of the Ultrasonic Channels’ Capacity
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Chitre, M. A high-frequency warm shallow water acoustic communications channel model and measurements. J. Acoust. Soc. Am. 2007, 122, 2580–2586. [Google Scholar] [PubMed]
- Stojanovic, M.; Preisig, J. Underwater acoustic communication channels: Propagation models and statistical characterization. IEEE Commun. Mag. 2009, 47, 84–89. [Google Scholar] [CrossRef]
- van Walree, P.A. Propagation and scattering effects in inderwater acoustc communication channels. IEEE J. Ocean. Eng. 2013, 38, 614–631. [Google Scholar] [CrossRef]
- Chitre, M.; Potter, J.; Ong, S.H. Underwater acoustic channel characterisation for medium-range shallow water communications. In Proceedings of the MTTS/IEEE Techno-Ocean’04, Kobe, Japan, 9–12 November 2004; pp. 40–45.
- Yang, W.B.; Yang, T.C. High-frequency channel characterization for M-ary frequency-shift-keying underwater acoustic communications. J. Acoust. Soc. Am. 2006, 120, 2615–2626. [Google Scholar] [CrossRef]
- Hicheri, R.; Pätzol, M.; Talha, B.; Youssef, N. A study on the distribution of the envelope and the capacity of underwater acoustic channels. In Proceedings of the 14th IEEE International Conference on Communication Systems, Macau, China, 19–21 November 2014.
- Kim, S.M.; Byun, S.H.; Kim, S.G.; Kim, D.J.; Kim, S.; Lim, Y.K. Underwater acoustic channel characterization at 6 kHz and 12 kHz in a shallow water near Jeju Island. In Proceedings of the MTS/IEEE Oceans Conference, San Diego, CA, USA, 23–26 September 2013.
- Kulhandjian, H.; Melodia, T. Modeling underwater acoustic channels in short-range shallow water enviroments. In Proceedings of the International Conference on Underwater Networks and Systems, Rome, Italy, 12–14 November 2014.
- Qarabaqi, P.; Stojanovic, M. Statistical characterization and computationally efficient modeling of a class of underwater acoustic communication channels. IEEE J. Ocean. Eng. 2013, 38, 701–717. [Google Scholar] [CrossRef]
- Kim, J.; Koh, I.S.; Lee, Y. Short-term fading model for signals reflected by ocean surfaces in underwater acoustic communications. IET Commun. 2015, 9, 1147–1153. [Google Scholar] [CrossRef]
- Hajenko, T.J.; Benson, C.R. The high frequency underwater acoustic channel. In Proceedings of the IEEE Oceans Conference, Sydney, Australia, 24–27 May 2010.
- Ainslie, M.A.; Dahl, P.H.; de Jong, C.A.F.; Laws, R.M. Practical spreading laws: The snakes and ladders of shallow water acoustics. In Proceedings of the 2nd International Conference and Exhibition on Underwater Acoustics, Rhodes, Greece, 22–27 June 2014.
- Rappaport, T.S. Wireless Communications: Principles and Practice; Prentice Hall: Upper Saddle River, NJ, USA, 1996. [Google Scholar]
- Goldsmith, A. Wireless Communications; Cambridge University Press: New York, NY, USA, 2005. [Google Scholar]
- Simon, M.K.; Alouini, M.S. Digital Communication over Fading Channels, 2nd ed.; John Wiley & Sons Inc.: Hoboken, NJ, USA, 2004. [Google Scholar]
- Borowski, B. Characterization of a very shallow water acoustic communication channel. In Proceedings of the MTS/IEEE Oceans Conference, Boloxi, MS, USA, 26–29 October 2009.
- Yacoub, M.D. The κ-μ and the η-μ distribution. IEEE Antennas Propag. Mag. 2007, 49, 68–81. [Google Scholar] [CrossRef]
- Zhang, J.; Cross, J.; Zheng, Y.R. Statistical channel modeling of wireless shallow water acoustic communications for experimental data. In Proceedings of the IEEE Military Communication Conference, San Jose, CA, USA, 31 October–3 November 2010; pp. 2412–2416.
- Ruiz-Vega, F.; Clemente, M.C.; Paris, J.F.; Otero, P. Rician shadowed statistical characterization of shallow water acoustic channels for wireless communications. In Proceedings of the UComms Conference, Sestri, Italy, 12–14 September 2012; pp. 1–3.
- Paris, J.F. Statistical characterization of κ-μ shadowed fading channels. IEEE Trans.Veh. Technol. 2014, 63, 518–526. [Google Scholar] [CrossRef]
- Sánchez, A.; Robles, E.; Rodrigo, F.J.; Ruiz-Vega, F.; Fernández-Plazaola, U.; Paris, J.F. Measurement and modeling of fading in ultrasonic underwater channels. In Proceedings of the 2nd International Conference and Exhibition on Underwater Acoustic, Rhodes, Greece, 22–27 June 2014.
- Gradshteyn, I.; Ryzhik, I.M. Tables of Integrals, Series and Products, 7th ed.; Academic Press: San Diego, CA, USA, 2007. [Google Scholar]
- Corder, G.W.; Foreman, D.I. Nonparametric Statistics for Non-Statisticians: A Step-by-Step Approach; John Wiley & Sons Inc.: Hoboken, NJ, USA, 2009. [Google Scholar]
- García-Corrales, C.; Cañete, F.J.; Paris, J.F. Capacity of κ-μ Shadowed Fading Channels. Int. J. Antennas Propag. 2014, 2014. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Channel Code | SF (kHz) | TD (m) | TS (m) | ASD (m) |
|---|---|---|---|---|
| A6-32 | 32 | 6 | 50 | 16 |
| A6-64 | 64 | 6 | 50 | 16 |
| A6-128 | 128 | 6 | 50 | 16 |
| B6-32 | 32 | 6 | 100 | 20 |
| B6-64 | 64 | 6 | 100 | 20 |
| B6-128 | 128 | 6 | 100 | 20 |
| C3-64 | 64 | 3 | 200 | 25 |
| C9-32 | 32 | 9 | 200 | 25 |
| C9-64 | 64 | 9 | 200 | 25 |
| C9-128 | 128 | 9 | 200 | 25 |
| Channel Code | Channel Attenuation (dB) | Doppler Spread (Hz) | Coherence Time (ms) |
|---|---|---|---|
| A6-32 | 30–50 | 1.7 | 116.3 |
| A6-64 | 4.0 | 50.2 | |
| A6-128 | 6.0 | 33.5 | |
| B6-32 | 35–65 | 2.5 | 78.9 |
| B6-64 | 4.2 | 47.4 | |
| B6-128 | 6.7 | 30.0 | |
| C3-64 | 50–80 | 2.8 | 70.5 |
| C9-32 | 1.7 | 119.6 | |
| C9-64 | 2.6 | 76.8 | |
| C9-128 | 4.0 | 50.2 |
| κ-μ Model | Rice Model | ||||||
|---|---|---|---|---|---|---|---|
| Channel Code | κ | μ | m | ϵ | C(b/s/Hz) | K | ϵ |
| A6-32 | 2.33 | 0.92 | 1.86 | 0.029 | 3.67 | 0.55 | 0.068 |
| A6-64 | 2.90 | 1.00 | 3.18 | 0.061 | 3.78 | 1.71 | 0.061 |
| A6-128 | 9.56 | 1.27 | 1.67 | 0.114 | 3.81 | 3.44 | 0.23 |
| B6-32 | 3.03 | 0.91 | 2.15 | 0.056 | 3.71 | 0.21 | 0.085 |
| B6-64 | 1.89 | 0.94 | 1.32 | 0.049 | 3.61 | 0.00 | 0.159 |
| B6-128 | 1.99 | 1.01 | 1.86 | 0.022 | 3.69 | 1.01 | 0.028 |
| C3-64 | 7.66 | 0.90 | 18.68 | 0.192 | 4.03 | 5.67 | 0.197 |
| C9-32 | 4.06 | 1.13 | 2.45 | 0.026 | 3.83 | 2.64 | 0.111 |
| C9-64 | 0.03 | 1.02 | 6.32 | 0.053 | 3.61 | 0.03 | 0.104 |
| C9-128 | 1.56 | 1.04 | 2.39 | 0.040 | 3.71 | 1.29 | 0.068 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cañete, F.J.; López-Fernández, J.; García-Corrales, C.; Sánchez, A.; Robles, E.; Rodrigo, F.J.; Paris, J.F. Measurement and Modeling of Narrowband Channels for Ultrasonic Underwater Communications. Sensors 2016, 16, 256. https://doi.org/10.3390/s16020256
Cañete FJ, López-Fernández J, García-Corrales C, Sánchez A, Robles E, Rodrigo FJ, Paris JF. Measurement and Modeling of Narrowband Channels for Ultrasonic Underwater Communications. Sensors. 2016; 16(2):256. https://doi.org/10.3390/s16020256
Chicago/Turabian StyleCañete, Francisco J., Jesús López-Fernández, Celia García-Corrales, Antonio Sánchez, Encarnación Robles, Francisco J. Rodrigo, and José F. Paris. 2016. "Measurement and Modeling of Narrowband Channels for Ultrasonic Underwater Communications" Sensors 16, no. 2: 256. https://doi.org/10.3390/s16020256
APA StyleCañete, F. J., López-Fernández, J., García-Corrales, C., Sánchez, A., Robles, E., Rodrigo, F. J., & Paris, J. F. (2016). Measurement and Modeling of Narrowband Channels for Ultrasonic Underwater Communications. Sensors, 16(2), 256. https://doi.org/10.3390/s16020256