
Ultra Wideband Indoor Positioning Technologies: Analysis and Recent Advances †


 ,
,
Abstract
:1. Introduction
- We provide an updated survey and a comparative analysis of existing indoor positioning technologies that we believe would spur further exploration by the research community of this difficult problem space (see Section 2).
- We conduct a strengths, weaknesses, opportunities and threats (SWOT) analysis for UWB technology, which provides new directions and deeper insights into the state of this technology beyond its well-known pros and cons (see Section 5).
2. Indoor Positioning Systems
2.1. Why Indoor Positioning Systems?
2.2. IPS Performance Metrics
2.3. Indoor Positioning Technologies
3. UWB Positioning
3.1. Why UWB Has Gained Attention Recently?
3.2. Signal Modulation
3.3. Policy and Regulation of UWB Use
4. UWB Positioning Algorithms
4.1. AOA-Based Algorithms
4.2. TOA-Based Algorithms
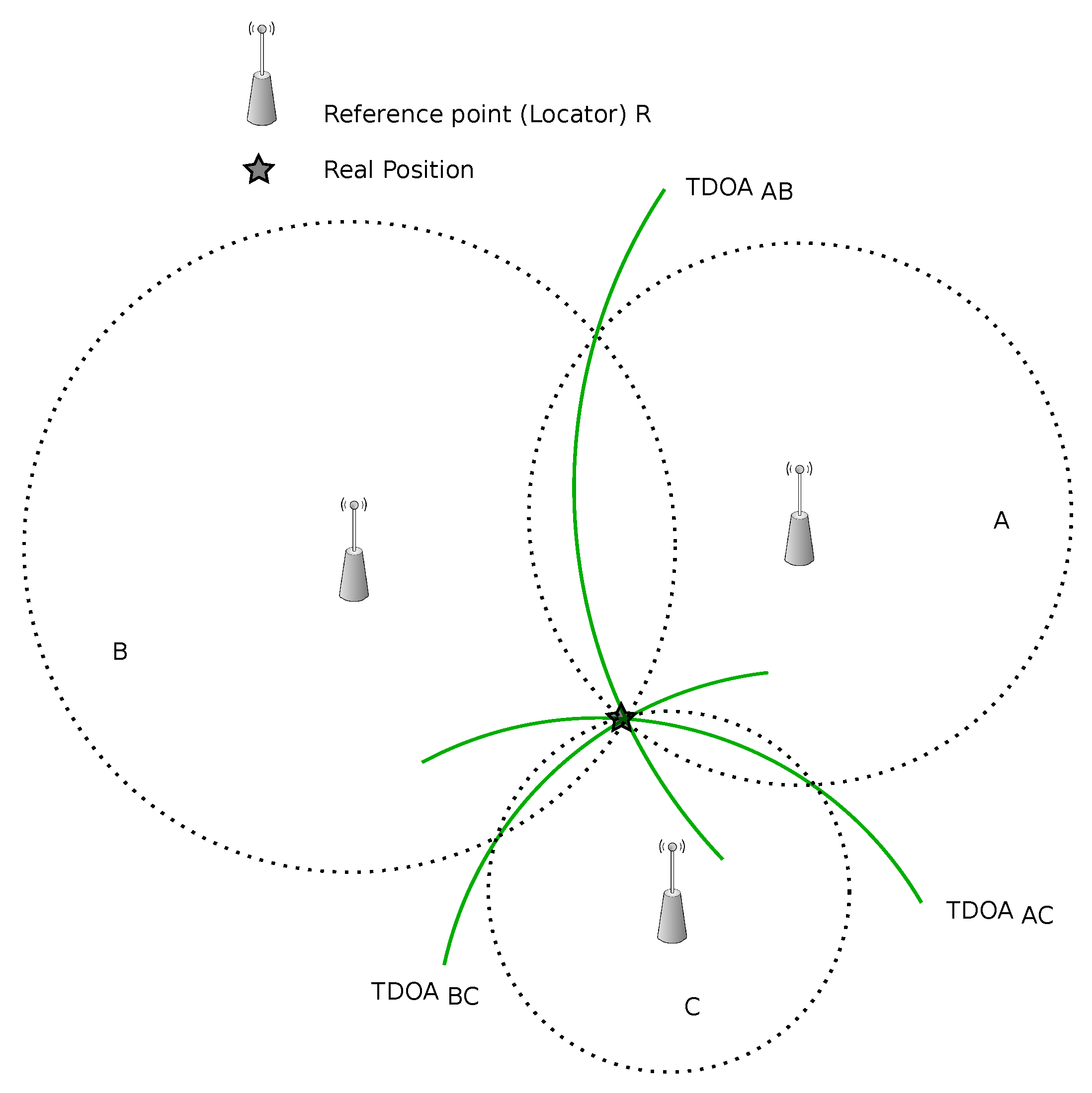
4.3. TDOA-Based Algorithms
4.4. RSS-Based Algorithms
4.5. Hybrid-Based Algorithms
4.6. Comparison of Positioning Algorithms
5. SWOT Analysis
5.1. Strength
5.2. Weaknesses
5.3. Opportunities
5.4. Threats
6. Lessons Learned and Concluding Remarks
Acknowledgments
Conflicts of Interest
Abbreviations
| Definition | Acronyms |
| Biased Kalman Filtering | BKF |
| Binary Phase Shift Keying | BPSK |
| Carrier Sense Multiple Access with Collision Avoidance | CSMA/CA |
| Channel Impulse Response | CIR |
| Extended Kalman Filter | EKF |
| Federal Communications Commission | FCC |
| Full Function Device | FFD |
| Global Positioning System | GPS |
| Global System for Mobile Communications | GSM |
| Impulse Radio Ultra WideBand | IR-UWB |
| Indoor Positioning System | IPS |
| Infrared | IR |
| Infrared Data Association | IrDA |
| Joint Committee for Guides in Metrology | JCGM |
| Least Square with Distance Contraction | LS-DC |
| Line of Sight | LOS |
| Local Area Network | LAN |
| Low data Rate UWB | LR-UWB |
| Maximum Likelihood Estimation | MLE |
| Micro Electro Mechanical Sensors | MEMS |
| Minimum-Shift Keying | MSK |
| Non-Line-of-Sight | NLoS |
| On-Off Keying | OOK |
| Pseudo Random | PR |
| Pulse Amplitude Modulation | PAM |
| Pulse Position Modulation | PPM |
| Pulse Width Modulation | PWM |
| Radio Frequency | RF |
| Radio-Frequency Identification | RFID |
| Real-Time Location System | RTLS |
| Received Signal Strength | RSS |
| Reduced Function Device | RFD |
| Strengths, Weaknesses, Opportunities, and Threats | SWOT |
| Time Difference of Arrival | TDOA |
| Time Division Multiple Access | TDMA |
| Time-Hopping Binary Phase Shift Keying | TH-BPSK |
| Time-Hopping Pulse Position Modulation | TH-PPM |
| Time-Hopping Spread Spectrum | TH-SS |
| Time Modulated Ultra WideBand | TM-UWB |
| Angle of Arrival | AOA |
| Time of Arrival | TOA |
| Transmit Power Control | TPC |
| Ultra WideBand | UWB |
| Weighted Least Square with Multidimensional Scaling | WLS-MDS |
| Wireless Fidelity | WiFi |
| Wireless Local Area Network | WLAN |
| Wireless Personal Area Network | WPAN |
| Worldwide Interoperability for Microwave Access | WiMAX |
References
- Hightower, J.; Borriello, G. Location systems for ubiquitous computing. IEEE Comput. 2001, 34, 57–66. [Google Scholar] [CrossRef]
- Huang, H.; Gartner, G. Chapter 20, A Survey of Mobile Indoor Navigation Systems. In Cartography in Central and Eastern Europe; Gartner, G., Ortag, F., Eds.; Springer: Heidelberg, Germany; pp. 305–319.
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of wireless indoor positioning techniques and systems. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Ram, S.; Sharf, J. The people sensor: A mobility aid for the visually impaired. In Proceedings of the Second International Symposium on Wearable Computers, Pittsburgh, PA, USA, 19–20 October 1998; pp. 166–167.
- Gu, Y.; Lo, A.; Niemegeers, I. A survey of indoor positioning systems for wireless personal networks. Tutor. IEEE Commun. Surv. 2009, 11, 13–32. [Google Scholar] [CrossRef]
- Jekabsons, G.; Kairish, V.; Zuravlyov, V. An Analysis of Wi-Fi Based Indoor Positioning Accuracy. Sci. J. Riga Tech. Univ. Comput. Sci. 2011, 44, 131–137. [Google Scholar] [CrossRef]
- Wu, H.; Marshall, A.; Yu, W. Path planning and following algorithms in an indoor navigation model for visually impaired. In Proceedings of the Second International Conference on Internet Monitoring and Protection, ICIMP 2007, San Jose, CA, USA, 1–5 July 2007; pp. 38–48.
- Al-Ammar, M.; Alhadhrami, S.; Al-Salman, A.; Alarifi, A. Comparative Survey of Indoor Positioning Technologies, Techniques, and Algorithms. In Proceedings of the 2014 International Conference on Cyberworlds (CW), Santander, Spain, 6–8 October 2014; pp. 1–8.
- Pandey, S.; Agrawal, P. A survey on localization techniques for wireless networks. J. Chin. Inst. Eng. 2006, 29, 1125–1148. [Google Scholar] [CrossRef]
- Khodjaev, J.; Park, Y.; Malik, A. Survey of NLOS identification and error mitigation problems in UWB-based positioning algorithms for dense environments. Ann. Telecommun. 2010, 65, 301–311. [Google Scholar] [CrossRef]
- Honkavirta, V.; Perala, T.; Ali-Loytty, S.; Piché, R. A comparative survey of WLAN location fingerprinting methods. In Proceedings of the 6th Workshop on Positioning, Navigation and Communication, WPNC 2009, Hannover, Germany, 19 March 2009; pp. 243–251.
- Wang, J.; Ghosh, R.; Das, S. A survey on sensor localization. J. Control Theory Appl. 2010, 8, 2–11. [Google Scholar] [CrossRef]
- Guvenc, I.; Chong, C. A survey on TOA based wireless localization and NLOS mitigation techniques. IEEE Commun. Surv. Tutor. 2009, 11, 107–124. [Google Scholar] [CrossRef]
- Ruiz-López, T.; Garrido, J.; Benghazi, K.; Chung, L. A Survey on Indoor Positioning Systems: Foreseeing a Quality Design. In Distributed Computing and Artificial Intelligence; Springer: Heidelberg, Germany, 2010; pp. 373–380. [Google Scholar]
- Al Nuaimi, K.; Kamel, H. A survey of indoor positioning systems and algorithms. In Proceedings of the 2011 International Conference on Innovations in Information Technology (IIT), IEEE Society, Abu Dhabi, United Arab Emirates, 25–27 April 2011; pp. 185–190.
- Ijaz, F.; Yang, H.; Ahmad, A.; Lee, C. Indoor positioning: A review of indoor ultrasonic positioning systems. In Proceedings of the 2013 15th International Conference on Advanced Communication Technology (ICACT), PyeongChang, Korea, 27–30 January 2013; pp. 1146–1150.
- Adalja Disha, M. A Comparative Analysis on Indoor Positioning Techniques and Systems. Int. J. Eng. Res. Appl. (IJERA) 2013, 3, 1790–1796. [Google Scholar]
- Zhu, L.; Yang, A.; Wu, D.; Liu, L. Survey of Indoor Positioning Technologies and Systems. In Life System Modeling and Simulation; Springer: Heidelberg, Germany, 2014; pp. 400–409. [Google Scholar]
- Alhadhrami, S.; Al-Salman, A.; Al-Khalifa, H.; Alarifi, A.; Alnafessah, A.; Alsaleh, M.; Al-Ammar, M. Ultra Wideband Positioning: An Analytical Study of Emerging Technologies. In Proceedings of the Eighth International Conference on Sensor Technologies and Applications, SENSORCOMM 2014, Rome, Italy, 16–20 November 2014; pp. 1–9.
- Mautz, R. Indoor Positioning Technologies. Ph.D. Thesis, ETH Zürich, Zürich, Switzerland, 2012. [Google Scholar]
- Shi, J.D. The Challenges of Indoor Positioning; Technical Report; National University of Singapore: Singapore, 2013. [Google Scholar]
- Collin, J.; Mezentsev, O.; Lachapelle, G. Indoor positioning system using accelerometry and high accuracy heading sensors. In Proceedings of the ION GPS/GNSS 2003 Conference, Portland, OR, USA, 9–12 September 2003; pp. 9–12.
- Chóliz, J.; Eguizabal, M.; Hernandez-Solana, A.; Valdovinos, A. Comparison of Algorithms for UWB Indoor Location and Tracking Systems. In Proceedings of the 2011 IEEE 73rd Conference on Vehicular Technology Conference (VTC Spring), Budapest, Hungary, 15–18 May 2011; pp. 1–5.
- Beauregard, S.; Haas, H. Pedestrian dead reckoning: A basis for personal positioning. In Proceedings of the 3rd Workshop on Positioning, Navigation and Communication, Hannover, Germany, 16 March 2006; pp. 27–35.
- Svalastog, M.S. Indoor Positioning-Technologies, Services and Architectures. Cand Scient Thesis, University of Oslo, Oslo, Norway, 2007. [Google Scholar]
- Hightower, J.; Borriello, G. Location Sensing Techniques; Technical Report for University of Washington; IEEE Computer: Seattle, WA, USA, 2001. [Google Scholar]
- Song, Z.; Jiang, G.; Huang, C. A Survey on Indoor Positioning Technologies. In Theoretical and Mathematical Foundations of Computer Science; Springer: Heidelberg, Germany, 2011; pp. 198–206. [Google Scholar]
- Gorostiza, E.M.; Lázaro Galilea, J.L.; Meca Meca, F.J.; Salido Monzú, D.; Espinosa Zapata, F.; Pallarés Puerto, L. Infrared sensor system for mobile-robot positioning in intelligent spaces. Sensors 2011, 11, 5416–5438. [Google Scholar] [CrossRef] [PubMed]
- Brassart, E.; Pegard, C.; Mouaddib, M. Localization Using Infrared Beacons. Robotica 2000, 18, 153–161. [Google Scholar] [CrossRef]
- Aitenbichler, E.; Muhlhauser, M. An IR local positioning system for smart items and devices. In Proceedings of the 23rd International Conference on Distributed Computing Systems Workshops, Providence, RI, USA, 19–22 May 2003; pp. 334–339.
- Rapinski, J.; Smieja, M. ZigBee Ranging using Phase Shift Measurements. J. Navig. 2015, 68, 665–677. [Google Scholar] [CrossRef]
- Rapinski, J. The Application of ZigBee Phase Shift Measurement in Ranging. Acta Geodyn. Geomater. 2015, 12, 145–149. [Google Scholar] [CrossRef]
- Ivanov, R. Indoor navigation system for visually impaired. In Proceedings of the 11th International Conference on Computer Systems and Technologies and Workshop for PhD Students in Computing on International Conference on Computer Systems and Technologies, Sofia, Bulgaria, 17–18 June 2010; pp. 143–149.
- Mautz, R.; Tilch, S. Survey of optical indoor positioning systems. In Proceedings of the 2011 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Guimaraes, Portugal, 21–23 September 2011; pp. 1–7.
- Eriksson, R. Indoor Navigation with Pseudolites (fake GPS sat.). Master’s Thesis, Linköping University, Linköping, Sweden, 2005. [Google Scholar]
- Wang, J. Pseudolite applications in positioning and navigation: Progress and problems. J. Glob. Position. Syst. 2002, 1, 48–56. [Google Scholar] [CrossRef]
- Barnes, J.; Rizos, C.; Wang, J.; Small, D.; Voigt, G.; Gambale, N. Locata: A new positioning technology for high precision indoor and outdoor positioning. In Proceedings of the 2003 International Symposium on GPS∖GNSS, Portland, OR, USA, 9–12 September 2003; pp. 9–18.
- Fluerasu, A.; Jardak, N.; Vervisch-Picois, A.; Samama, N. Status of the GNSS transmitter-based approach for indoor positioning. Coord. Mag. 2011, 7, 1–8. [Google Scholar]
- Niwa, H.; Kodaka, K.; Sakamoto, Y.; Otake, M.; Kawaguchi, S.; Fujii, K.; Kanemori, Y.; Sugano, S. GPS-based indoor positioning system with multi-channel pseudolite. In Proceedings of the IEEE International Conference on Robotics and Automation, ICRA 2008, Pasadena, CA, USA, 19–23 May 2008; pp. 905–910.
- Alawieh, M.; Patino-Studencka, L.; Dahlhaus, D. Stochastic modeling of pseudolite clock errors using enhanced AR methods. In Proceedings of the 2010 7th International Symposium on Communication Systems Networks and Digital Signal Processing (CSNDSP), Newcastle upon Tyne, UK, 21–23 July 2010; pp. 178–183.
- Bowdith, N. Chapter 7, The American Practical Navigator. In Part F: Robotics; National Imagery and Mapping Agency: Bethesda, MD, USA, 2002; pp. 113–118. [Google Scholar]
- Liu, J.; Shi, D.; Leung, K. Indoor navigation system based on omni-directional corridorguidelines. In Proceedings of the 2008 International Conference on Machine Learning and Cybernetics, Kunming, China, 12–15 July 2008; pp. 1271–1276.
- Babu, R.; Wang, J. Ultra-tight integration of pseudolites with INS. In Proceedings of the 2006 IEEE/ION Position, Location, and Navigation Symposium, San Diego, CA, USA, 25–27 April 2006; pp. 705–713.
- Ghavami, M.; Michael, L.B.; Kohno, R. Front MatterUltra Wideband Signals and Systems in Communication Engineering; John Wiley & Sons, Ltd: Newark, NJ, USA, 2006. [Google Scholar]
- Siwiak, K.; McKeown, D. Ultra-Wideband Radio Technology; John Wiley & Sons, Ltd: Newark, NJ, USA, 2005. [Google Scholar]
- Cheng, G. Accurate TOA-based UWB localization system in coal mine based on WSN. Phys. Proced. 2012, 24, 534–540. [Google Scholar] [CrossRef]
- Shahi, A.; Aryan, A.; West, J.; Haas, C.; Haas, R. Deterioration of UWB positioning during construction. Autom. Constr. 2012, 24, 72–80. [Google Scholar] [CrossRef]
- Segura, M.; Mut, V.; Sisterna, C. Ultra wideband indoor navigation system. IET Radar Sonar Navig. 2012, 6, 402–411. [Google Scholar] [CrossRef]
- Arias-de Reyna, E.; Mengali, U. A maximum likelihood UWB localization algorithm exploiting knowledge of the service area layout. Wirel. Pers. Commun. 2013, 69, 1413–1426. [Google Scholar] [CrossRef]
- Krishnan, S.; Sharma, P.; Guoping, Z.; Woon, O. A UWB based localization system for indoor robot navigation. In Proceedings of the IEEE International Conference on Ultra-Wideband, ICUWB 2007, Singapore, 24–26 September 2007; pp. 77–82.
- Ubisense Company. Ubisense Website, 2009. Available online: http://www.ubisense.net/en/ (accessed on 1 April 2016).
- Technavio. Global Indoor LBS Market 2015–2019. Available online: http://www.technavio.com/report/global-indoor-lbs-market-2015-2019 (accessed on 20 August 2015).
- Alereon Inc. Alereon Demonstrates Military Wireless Personal Area Network. 2015. Available online: http://www.alereon.com/?page_id=2992 (accessed on 20 August 2015).
- Phebey, T. The Ubisense Assembly Control Solution for BMW. 2010. Available online: https://scholar.google.com/scholar?hl=en&q=ubisense+BMW&btnG=&as_sdt=1%2C5&as_sdtp= (accessed on 20 August 2015).
- Gabriel, C. UWB’s Dream is Still Alive in Micro-Location. 2014. Available online: http://www.rethink-wireless.com/2014/10/21/uwbs-dream-alive-micro-location-page1 (accessed on 20 August 2015).
- Krulwich, B. Ultra-Wideband Poised to Enter Smartphones: A Location Opportunity. Available online: http://www.gpsbusinessnews.com/Ultra-Wideband-Poised-to-Enter-Smartphones-a-Location-Opportunity_a4969.html (accessed on 20 August 2015).
- Cui, S. Modulation and Multiple Access Techniques for Ultra-Wideband Communication Systems. Ph.D. Thesis, Cleveland State University, Cleveland, OH, USA, 2011. [Google Scholar]
- Kuhn, M.; Mahfouz, M.; Turnmire, J.; Wang, Y.; Fathy, A. A multi-tag access scheme for indoor UWB localization systems used in medical environments. In Proceedings of the 2011 IEEE Topical Conference on Biomedical Wireless Technologies, Networks, and Sensing Systems (BioWireleSS), Phoenix, AZ, USA, 16–19 January 2011; pp. 75–78.
- Davis, M. Foliage Penetration Radar; The Institution of Engineering and Technology: Stevenage, UK, 2011. [Google Scholar]
- Davis, M.E. Frequency allocation challenges for ultra-wideband radars. IEEE Aerosp. Electron. Syst. Mag. 2013, 28, 12–18. [Google Scholar] [CrossRef]
- Fischer, G.; Klymenko, O.; Martynenko, D.; Luediger, H. An impulse radio UWB transceiver with high-precision TOA measurement unit. In Proceedings of the 2010 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Zurich, Switzerland, 15–17 September 2010; pp. 1–8.
- Rowe, N.; Fathy, A.; Kuhn, M.; Mahfouz, M. A UWB transmit-only based scheme for multi-tag support in a millimeter accuracy localization system. In Proceedings of the 2013 IEEE Topical Conference on Wireless Sensors and Sensor Networks (WiSNet), Austin, TX, USA, 20–23 January 2013; pp. 7–9.
- Jiang, L.; Hoe, L.; Loon, L. Integrated UWB and GPS location sensing system in hospital environment. In Proceedings of the 2010 the 5th IEEE Conference on Industrial Electronics and Applications (ICIEA), Taichung, Taiwan, 15–17 June 2010; pp. 286–289.
- Pittet, S.; Renaudin, V.; Merminod, B.; Kasser, M. UWB and MEMS based indoor navigation. J. Navig. 2008, 61, 369–384. [Google Scholar] [CrossRef]
- Cao, F.; Li, M. An Algorithm for UWB Signals Tracking Based on Extended H Filter. Phys. Proced. 2012, 33, 905–911. [Google Scholar] [CrossRef]
- Mucchi, L.; Trippi, F.; Carpini, A. Ultra Wide Band real-time location system for cinematic survey in sports. In Proceedings of the 3rd International Symposium on Applied Sciences in Biomedical and Communication Technologies (ISABEL), Rome, Italy, 7–10 November 2010; pp. 1–6.
- Liu, J.; Wang, Q.; Xiong, J.; Huang, W.; Peng, H. Indoor and Outdoor Coperative Real-Time Positioning System. J. Theor. Appl. Inf. Technol. (JATIT) 2012, 48, 1066–1073. [Google Scholar]
- Zhang, C.; Kuhn, M.; Merkl, B.; Fathy, A.; Mahfouz, M. Realtime non-coherent UWB positioning radar with millimeter range accuracy: Theory and experiment. IEEE Trans. Microw. Theory Tech. 2010, 58, 9–20. [Google Scholar] [CrossRef]
- Deissler, T.; Janson, M.; Zetik, R.; Thielecke, J. Infrastructureless indoor mapping using a mobile antenna array. In Proceedings of the 2012 19th International Conference on Systems, Signals and Image Processing (IWSSIP), Vienna, Austria, 11–13 April 2012; pp. 36–39.
- Tuchler, M.; Schwarz, V.; Huber, A. Location accuracy of an UWB localization system in a multi-path environment. In Proceedings of the 2005 IEEE International Conference on Ultra-Wideband, ICU 2005, Zurich, Switzerland, 5–8 September 2005; pp. 414–419.
- Jiang, X.; Zhang, H.; Wang, W. NLOS error mitigation with information fusion algorithm for UWB ranging systems. J. China Univ. Posts Telecommun. 2012, 19, 22–29. [Google Scholar] [CrossRef]
- Tomé, P.; Robert, C.; Merz, R.; Botteron, C. UWB-based Local Positioning System: From a small-scale experimental platform to a large-scale deployable system. In Proceedings of the 2010 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Zurich, Switzerland, 15–17 September 2010; pp. 1–10.
- Kilic, Y.; Wymeersch, H.; Meijerink, A.; Bentum, M.; Scanlon, W. UWB device-free person detection and localization. CoRR 2013, abs/1303.4092, 1–10. [Google Scholar]
- Mahfouz, M.; Kuhn, M.; Wang, Y.; Turnmire, J.; Fathy, A. Towards sub-millimeter accuracy in UWB positioning for indoor medical environments. In Proceedings of the 2011 IEEE Topical Conference on Biomedical Wireless Technologies, Networks, and Sensing Systems (BioWireleSS), Phoenix, AZ, USA, 16–19 January 2011; pp. 83–86.
- McCracken, M.; Bocca, M.; Patwari, N. Joint ultra-wideband and signal strength-based through-building tracking for tactical operations. In Proceedings of the 2013 10th Annual IEEE Communications Society Conference on Sensor, Mesh and Ad Hoc Communications and Networks (SECON), New Orleans, LA, USA, 24–27 June 2013; pp. 309–317.
- Jiang, H.; Zhang, Y.; Cui, H.; Liu, C. Fast three-dimensional node localization in UWB wireless sensor network using propagator method digest of technical papers. In Proceedings of the 2013 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 11–14 January 2013; pp. 627–628.
- Yang, D.; Li, H.; Zhang, Z.; Peterson, G. Compressive sensing based sub-mm accuracy UWB positioning systems: A space–time approach. Digit. Signal Process. 2012, 23, 340–354. [Google Scholar] [CrossRef]
- Mirza, R.; Tehseen, A.; Kumar, A. An indoor navigation approach to aid the physically disabled people. In Proceedings of the 2012 International Conference on Computing, Electronics and Electrical Technologies (ICCEET), Kumaracoil, India, 21–22 March 2012; pp. 979–983.
- Brown, C. Real-Time Location of Jena’s Buses and Trams with Ubisense RTLS, 2010. Ubisense Report. Available online: http://www.ubisense.net/en/news-and-events/press-releases/real-time-location-of-jenas-buses-and-trams-with-ubisense-rtls.html (accessed on 1 September 2015).
- Baum, M. RTL in Longueuil selects bus yard management solution provided by Solotech, ISR Transit and Ubisense. 2011. Ubisense Report. Available online: http://www.ubisense.net/en/news-and-events/press-releases/rtl-in-longueuil-selects-bus-yard.html (accessed on 1 September 2014).
- Brown, C. Ubisense launches Intrinsically Safe location tracking tags for personnel safety in the Oil and Gas industry. 2010. Ubisense Report. Available online: http://www.ubisense.net/en/news-and-events/press-releases/ubisense-launches-intrinsically-safe-location-tracking-tags-in-the-oil-and-gas-industry.html (accessed on 1 September 2015).
- Kok, M.; Hol, J.D.; Schon, T.B. Indoor positioning using ultrawideband and inertial measurements. IEEE Trans. Veh. Technol. 2015, 64, 1293–1303. [Google Scholar] [CrossRef]
- Ravikrishnan, H. Ultra-Wideband Position Tracking on an Assembly Line. Ph.D. Thesis, Clemson University, Clemson, SC, USA, 2014. [Google Scholar]
- Bharadwaj, R.; Swaisaenyakorn, S.; Parini, C.G.; Batchelor, J.; Alomainy, A. Localization of wearable ultrawideband antennas for motion capture applications. IEEE Antennas Wirel. Propag. Lett. 2014, 13, 507–510. [Google Scholar] [CrossRef]
- Zaric, A.; Matos, V.S.; Costa, J.R.; Fernandes, C.A. Viability of wall-embedded tag antenna for ultra-wideband real-time suitcase localisation. IET Microw. Antennas Propag. 2013, 8, 423–428. [Google Scholar] [CrossRef]
- Ye, R. Ultra-wideband Indoor Localization Systems. Ph.D. Thesis, Oegon State University, Corvallis, OR, USA, 2012. [Google Scholar]
- Zwirello, L.; Schipper, T.; Harter, M.; Zwick, T. UWB localization system for indoor applications: Concept, realization and analysis. J. Electric. Comput. Eng. 2012, 2012, 1–11. [Google Scholar] [CrossRef]
- Wang, F.; Zhang, X. Joint estimation of TOA and DOA in IR-UWB system using sparse representation framework. ETRI J. 2014, 36, 460–468. [Google Scholar] [CrossRef]
- Muller, P.; Wymeersch, H.; Piche, R. UWB Positioning with Generalized Gaussian Mixture Filters. IEEE Trans. Mob. Comput. 2014, 13, 2406–2414. [Google Scholar] [CrossRef]
- Leitinger, E.; Fröhle, M.; Meissner, P.; Witrisal, K. Multipath-assisted maximum-likelihood indoor positioning using UWB signals. In Proceedings of the 2014 IEEE International Conference on Communications Workshops (ICC), Sydney, Australia, 10–14 June 2014; pp. 170–175.
- Garcia, E.; Poudereux, P.; Hernandez, A.; Urena, J.; Gualda, D. A robust UWB indoor positioning system for highly complex environments. In Proceedings of the 2015 IEEE International Conference on Industrial Technology (ICIT), Seville, Spain, 17–19 March 2015; pp. 3386–3391.
- Perrat, B.; Smith, M.J.; Mason, B.S.; Rhodes, J.M.; Goosey-Tolfrey, V.L. Quality assessment of an UWB positioning system for indoor wheelchair court sports. SAGE J. 2015, 229. [Google Scholar] [CrossRef] [Green Version]
- Al-Jazzar, S.; Muchkaev, A.; Al-Nimrat, A.; Smadi, M. Low complexity and high accuracy angle of arrival estimation using eigenvalue decomposition with extension to 2D AOA and power estimation. EURASIP J. Wirel. Commun. Netw. 2011, 2011, 1–13. [Google Scholar] [CrossRef]
- Reddy, N.; Sujatha, B. TDOA Computation Using Multicarrier Modulation for Sensor Networks. Int. J. Comput. Sci. Commun. Netw. 2011, 1, 85–90. [Google Scholar]
- Gezici, S. Localization via ultra-wideband radios: A look at positioning aspects for future sensor networks. IEEE Signal Process. Mag. 2005, 22, 70–84. [Google Scholar] [CrossRef]
- Xu, J.; Ma, M.; Law, C. AOA Cooperative Position Localization. In Proceedings of the Global Telecommunications Conference, IEEE GLOBECOM 2008, IEEE, New Orleans, LO, USA, 30 November–4 December 2008; pp. 1–5.
- Lee, Y. Weighted-Average Based AOA Parameter Estimations for LR-UWB Wireless Positioning System. IEICE Trans. Commun. 2011, 94, 3599–3602. [Google Scholar] [CrossRef]
- Subramanian, A. UWB Linear Quadratic Frequency Domain Frequency Invariant Beamforming and Angle of Arrival Estimation. In Proceedings of the IEEE 65th Vehicular Technology Conference, VTC2007-Spring, Dublin, Ireland, 22–25 April 2007; pp. 614–618.
- Mok, E.; Xia, L.; Retscher, G.; Tian, H. A case study on the feasibility and performance of an UWB-AoA real time location system for resources management of civil construction projects. J. Appl. Geod. 2010, 4, 23–32. [Google Scholar] [CrossRef]
- Gerok, W.; El-Hadidy, M.; El Din, S.; Kaiser, T. Influence of the real UWB antennas on the AoA estimation based on the TDoA localization technique. In Proceedings of the 2010 IEEE Middle East Conference on Antennas and Propagation (MECAP), Cairo, Egypt, 20–22 October 2010; pp. 1–6.
- Dardari, D.; Conti, A.; Ferner, U.; Giorgetti, A.; Win, M.Z. Ranging with ultrawide bandwidth signals in multipath environments. IEEE Proc. 2009, 97, 404–426. [Google Scholar] [CrossRef]
- Blankenbach, J.; Norrdine, A.; Hellmers, H. A robust and precise 3D indoor positioning system for harsh environments. In Proceedings of the 2012 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sydney, NSW, Australia, 13–15 November 2012; pp. 1–8.
- Leitinger, E.; Meissner, P.; Rudisser, C.; Dumphart, G.; Witrisal, K. Evaluation of Position-Related Information in Multipath Components for Indoor Positioning. IEEE J. Sel. Areas Commun. 2015, 33, 2313–2328. [Google Scholar] [CrossRef]
- Cyganski, D.; Orr, J.; Michalson, W.R. A multi-carrier technique for precision geolocation for indoor/multipath environments. In Proceedings of the 16th International Technical Meeting of the Satellite Division of The Institute of Navigation, Portland, OR, USA, 9–12 September 2003; pp. 1069–1073.
- Cyganski, D.; Orr, J.; Michalson, W.R. Performance of a Precision Indoor Positioning System Using Multi Carrier Approach. In Proceedings of the 2004 National Technical Meeting of The Institute of Navigation, San Diego, CA, USA, 26–28 January 2004; pp. 175–180.
- Wang, S.; Waadt, A.; Burnic, A.; Xu, D. System implementation study on RSSI based positioning in UWB networks. In Proceedings of the 2010 7th International Symposium on Wireless Communication Systems (ISWCS), York, UK, 19–22 September 2010; pp. 36–40.
- Gigl, T.; Janssen, G.; Dizdarevic, V.; Witrisal, K.; Irahhauten, Z. Analysis of a UWB Indoor Positioning System Based on Received Signal Strength. In Proceedings of the 4th Workshop on Positioning, Navigation and Communication, WPNC ’07, Hannover, Germany, 22 March 2007; pp. 97–101.
- Kodippili, N.; Dias, D. Integration of fingerprinting and trilateration techniques for improved indoor localization. In Proceedings of the 2010 Seventh International Conference On Wireless And Optical Communications Networks (WOCN), Colombo, Sri Lanka, 6–8 September 2010; pp. 1–6.
- Wymeersch, H.; Lien, J.; Win, M.Z. Cooperative localization in wireless networks. IEEE Proc. 2009, 97, 427–450. [Google Scholar] [CrossRef]
- Cao, F.; Li, M. An Algorithm for UWB Signals Tracking Based on Extended H Filter. Phys. Proced. 2012, 33, 905–911. [Google Scholar] [CrossRef]
- Liu, J.; Wang, Q.; Xiong, J.; Huang, W.; Peng, H. Indoor and Outdoor Cooperative Real-Time Positioning System. J. Theor. Appl. Inf. Technol. 2013, 48, 1066–1073. [Google Scholar]
- Digel, J.; Masini, M.; Grozing, M.; Berroth, M.; Fischer, G.; Olonbayar, S.; Gustat, H.; Scheytt, J.C. Integrator and Digitizer for a non-coherent IR-UWB Receiver. In Proceedings of the 2013 IEEE 13th Topical Meeting on Silicon Monolithic Integrated Circuits in RF Systems (SiRF), Austin, TX, USA, 21–23 January 2013; pp. 93–95.
- Srimathi, S.; Kannan, P. Literature survey for performance evaluation of various time hopping ultra-wideband communication system. Int. J. Sci. Eng. Res. 2013, 4, 1–3. [Google Scholar]
- Shen, G.; Zetik, R.; Thoma, R. Performance comparison of TOA and TDOA based location estimation algorithms in LOS environment. In Proceedings of the 5th Workshop on Positioning, Navigation and Communication (WPNC), Hannover, Germany, 27 March 2008; pp. 71–78.
- Mallat, A.; Louveaux, J.; Vandendorpe, L. UWB based positioning: Cramer Rao bound for Angle Of Arrival and comparison with Time Of Arrival. In Proceedings of the 2006 Symposium on Communications and Vehicular Technology, Liege, Belgium, 23 November 2006; pp. 65–68.
- Kułakowski, P.; Vales-Alonso, J.; Egea-López, E.; Ludwin, W.; García-Haro, J. Angle-of-arrival localization based on antenna arrays for wireless sensor networks. Comput. Electr. Eng. 2010, 36, 1181–1186. [Google Scholar] [CrossRef]
- Hatami, A.; Pahlavan, K. Performance Comparison of RSS and TOA Indoor Geolocation Based on UWB Measurement of Channel Characteristics. In Proceedings of the IEEE 17th International Symposium on Personal, Indoor and Mobile Radio Communications, Helsinki, Finland, 11–14 September 2006; pp. 1–6.
- Cong, L.; Zhuang, W. Hybrid TDOA/AOA mobile user location for wideband CDMA cellular systems. IEEE Trans. Wirel. Commun. 2002, 1, 439–447. [Google Scholar] [CrossRef]
- Zhao, Y. Standardization of mobile phone positioning for 3G systems. IEEE Commun. Mag. 2002, 40, 108–116. [Google Scholar] [CrossRef]
- Yan, J. Algorithms for Indoor Positioning Systems Using Ultra-Wideband Signals; Delft University of Technology: Delft, Netherlands, 2010. [Google Scholar]
- Hämäläinen, M.; Hovinen, V.; Latva-aho, M. Survey to Ultra Wideband Systems. Eur. Cooperation Field Sci. Tech. Res. 1999, 262, 1–7. [Google Scholar]
- Otis, B.; Rabaey, J. Ultra-Low Power Wireless Technologies for Sensor Networks; Springer Science & Business Media: Berlin, Germany, 2007. [Google Scholar]
- Aiello, R.; Batra, A. (Eds.) Ultra Wideband Systems: Technologies and Applications; Newnes-Elsevier: Burlington, MA, USA, 2006.
- Miller, L. Why UWB? a review of ultrawideband technology; Technical Report for NETEX Project Office, DARPA by Wireless Communication Technologies Group; National Institute of Standards and Technology: Gaithersburg, MD, USA, 2003. [Google Scholar]
- Savioli, A.; Goldoni, E.; Gamba, P. Impact of channel access on localization in cooperative UWB sensor network: A case study. In Proceedings of the 2012 9th Workshop on Positioning Navigation and Communication (WPNC), Dresden, Germany, 15–16 March 2012; pp. 19–23.
- Ye, S.; Chen, J.; Liu, L.; Zhang, C.; Fang, G. A novel compact UWB ground penetrating radar system. In Proceedings of the 2012 14th International Conference on Ground Penetrating Radar (GPR), Shanghai, China, 4–8 June 2012; pp. 71–75.
- Porcino, D.; Hirt, W. Ultra-wideband radio technology: potential and challenges ahead. IEEE Commun. Mag. 2003, 41, 66–74. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Academic Database | 2010 | 2011 | 2012 | 2013 | 2014 |
|---|---|---|---|---|---|
| Thomson Reuters | 38 | 34 | 44 | 62 | 35 |
| Google Scholar | 80 | 63 | 70 | 69 | 55 |
| ProQuest | 79 | 54 | 62 | 67 | 52 |
| Survey | Year | Environment | Technology | Description |
|---|---|---|---|---|
| Pandey et al. [9] | 2006 | Indoor, Outdoor | General | Localization techniques for wireless networks |
| Liu et al. [3] | 2007 | Indoor | Wireless | A quantitative comparison of indoor positioning solutions |
| Khodjaev et al. [10] | 2009 | Indoor | UWB | A comparison of different methods of NLOS identification and error mitigation |
| Honkavirta et al. [11] | 2009 | Indoor | Wireless | A comparative study of WLAN location fingerprinting methods based on RSS values |
| Wang et al. [12] | 2009 | Indoor, Outdoor | General | Localization methods of sensor nodes in WSN |
| Guvenc et al. [13] | 2009 | Indoor | RF | TOA positioning algorithms in NLOS environments |
| Ruiz-López et al. [14] | 2010 | Indoor | General | An analytic review of different positioning techniques in relation several quality attributes |
| Al Nuaimi and Kamel [15] | 2011 | Indoor | General | A short survey of existing indoor positioning technologies |
| Ijaz et al. [16] | 2013 | Indoor | RF, Ultrasonic | A comparison of the ultrasonic system based on performance, accuracy and limitations |
| Adalja Disha [17] | 2013 | Indoor | Wireless | A performance comparisons including (among others) precision complexity, accuracy, scalability, cost, and robustness |
| Zhu et al. [18] | 2014 | Indoor | General | A review of indoor positioning technologies |
| Metric | Definition |
|---|---|
| Accuracy | “The closeness of agreement between a measured quantity value and a true quantity value of a measure” [20] |
| Availability | The positioning service availability in terms of time percentage |
| Coverage Area | The area covered by an IPS |
| Scalability | The degree to which the system ensures the normal positioning function when it scales in one of two dimensions: geography and number of users |
| Cost | Can be measured in different dimensions; money, time, space, and energy which can be affected at different levels of the system: system installation and maintenance, infrastructure components, and positioning devices [3,5] |
| Privacy | Strong access control over how users’ personal information is collected and used [5] |
| Author-Year | Classified based on | Categories |
|---|---|---|
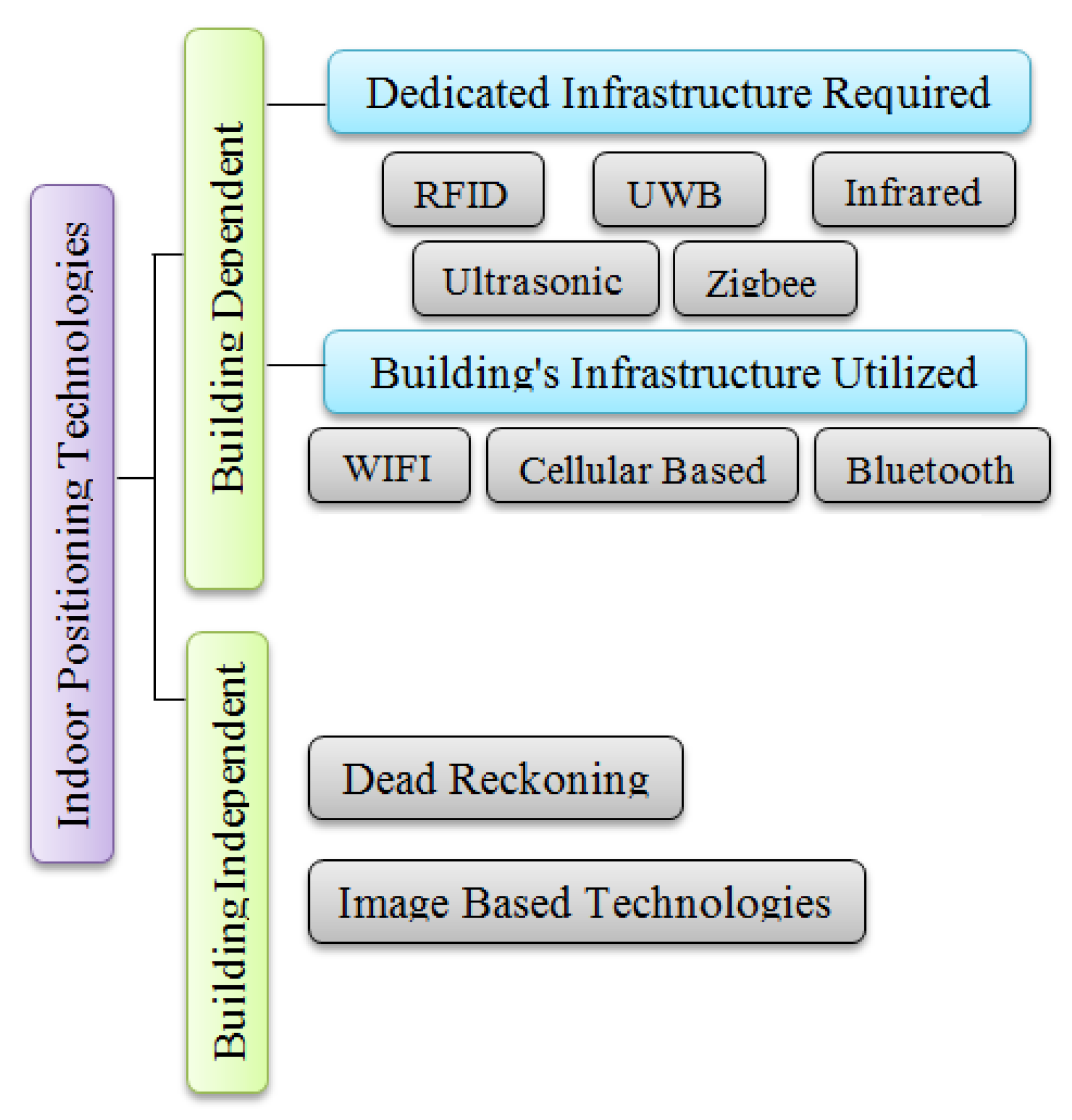
| Collin et al.—2003 | Need for hardware | Technologies that require hardware in the building, and self-contained ones |
| Gu et al.—2009 | Existence of network | Network-based and non-network-based technologies |
| System architecture | Self-positioning architecture, self-oriented infrastructure-assisted architecture, and infrastructure positioning architecture | |
| Main medium used to determine positions | Ultrasound, radio frequency, magnetic, vision-Based, and audible sound technologies | |
| Al Nuaimi and Kamel—2011 | Installed system in a building | Fixed indoor positioning and indoor pedestrian positioning |
| Chliz et al.—2011 | Prior knowledge | Parametric and non-parametric technologies |
| Rainer Mautz—2012 | Sensor type | Camera, infrared, tactile & polar systems, sound, WLAN and WiFi, RFID, ultra wideband, high sensitivity GNSS, pseudolites, other radio frequencies , inertial navigation, magnetic systems , and infrastructure systems |
| Technology | Common Measurement Methods | Advantages | Disadvantages |
|---|---|---|---|
| RFID | Proximity, RSS | Penetrate solid, non-metal objects; does not require LOS between RF transmitters and receivers [25]. | The antenna affects the RF signal, the positioning coverage is small, the role of proximity lacks communications capabilities, cannot be integrated easily with other systems [27], RF communication is not inherently secure and consumes more power than IR devices [25]. |
| UWB | ToA,TDOA | High accuracy positioning, even in the presence of severe multipath, effectively passes through walls, equipment, and any other obstacles; UWB will not interfere with existing RF systems if properly designed [25]. | High cost of UWB equipment [27]; although UWB is less susceptible to interference relative to other technologies, it is still subject to interference caused by metallic materials [3]. |
| Infrared | Proximity, Differential Phase-shift, AoA | Since IR signals cannot penetrate through walls, it is suitable for sensitive communication because it will not be accessible outside a room or a building [25]. | Does not penetrate walls, therefore it is typically used in small spaces such as one room; IR communication is blocked by obstacles that block light which includes almost everything solid [25]; requires LOS between sender and receiver when using direct IR; One problem with diffuse infrared systems is their poor performance in locations with direct sunlight or fluorescent lighting because the infrared emissions (of the light sources) may interfere with the signals [25]. |
| Ultrasonic | ToA, TDOA | Does not require LOS; do not interfere with electromagnetic waves [25] | Does not penetrate solid walls; there may be loss of signal because of obstruction; false signals because of reflections; and interference caused by high frequency sounds (e.g., keys jangling) [25]. |
| Zigbee | RSS, Phase Shift Measurement | Its sensors require very little energy [25,27], and Low cost [25]. | ZigBee which operates in unlicensed IS bands seems vulnerable to interference caused by a wide range of signal types (using the same frequency). This might disrupt radio communication [20]; it is suitable for networks in which conversation between two devices takes some few milliseconds which allows the transceiver to switch to sleep mode quickly [25]. |
| WLAN | RSS | Use existing communication networks that may cover more than one building; the majority of devices available nowadays are equipped with WLAN connectivity; WLANs exist approximately in the majority of buildings; LOS is not required [20]. | A major drawback of WLAN fingerprinting systems is the recalculation of the predefined signal strength map in case of changes in the environment (e.g., open/closed doors and the moving of furniture in offices). [20]. |
| Cellular Based | RSS | No interference with devices that operate at the same frequency; the hardware of customary mobile phones can also be used [20]. | Low reliability due to varying signal propagation conditions [20]. |
| Bluetooth | Proximity, RSS | Does not require LOS between communicating devices [25]; a lighter standard and highly ubiquitous; it is also built into most smartphones, personal digital assistants, etc. [3]. | The greater the number of cells, the smaller the size of each cell and hence better accuracy, but more cells increase the cost; requires some relatively expensive receiving cells; requires a host computer to locate the Bluetooth radio. Because the 2.4 GHz spectrum that Bluetooth is using is unlicensed, new uses for it are to be expected, and as the spectrum becomes more widely used; radio interference is more likely to occur [25]. |
| Dead Reckoning | Tracking | Does not require additional hardware such as sensors | The DR calculates only an approximate position [41]. |
| Image based technologies | Pattern recognition | They are relatively cheap compared with other technologies such as ultrasound and ultra wideband technologies [42]. | Requires LOS, coverage is limited [27]. |
| Pseudolites | RSS | They allow to extend the coverage area much farther to several kilometres and provide great flexibility in deployment that can be optimized for a particular application and they are also compatible with existing GPS receivers [43]. | They are negatively affected by multipath, signal interference among pseudolites, weak time synchronization due to less accurate clocks within pseudolites and carrier phase ambiguities [35]. |
| Country | License | Freq. Mask | Regulations |
|---|---|---|---|
| US | Unlicensed | 3.1–10.6 GHz | Indoor only |
| Cannot be used in fixed outdoor environments or those linked to a fixed outdoor antenna | |||
| Europe | Unlicensed | 3.1–10.6 GHz | Indoor only |
| Devices must be installed in road and rail vehicles, transmit power control (TPC) of a range 12 dB relative to the maximum allowed radiated power. The maximum mean e.i.r.p. spectral density must be −53.3 dBm/MHz when no TPC is in place | |||
| UK | Unlicensed | 3.1–10.6 GHz | In harmony with European regulations |
| Indoor | |||
| Outdoor but not attached to fixed installation, infrastructure or automotive vehicle (or railway vehicle) | |||
| The equipment must not cause interference to any wireless telegraphy | |||
| S. Korea | Unlicensed | 3.1–10.2 GHz | Indoor only |
| It is similar to bands allocated by FCC and it uses a different emission mask for accommodating its spectrum environment | |||
| for UWB devices operating in the 3100 to 4200 MHz band, it requires use of detect and avoid technology | |||
| Japan | Unlicensed | 3.4–10.25 GHz | Indoor only |
| In the 3400–4200 MHz band must incorporate interference mitigation techniques | |||
| In the 4200–4800 MHz band it can operate without mitigation techniques | |||
| Singapore | Unlicensed | 3.4–9 GHz | Indoor only |
| The PSD limit shall be −41.3 dBm/MHz for devices equipped with interference mitigation techniques. For devices without mitigation techniques, the permissible PSD limit is −70 dBm/MHz |
| No. | Authors | Year | Accompanied Technology | Algorithm | Environment | More Details |
|---|---|---|---|---|---|---|
| 1 | Ch’oliz et al. [23] | 2011 | TOA | LOS, NLOS | Compared the performance of impulse radio (IR) UWB indoor tracking systems using different parametric and non-parametric algorithms such as weighted least square with multidimensional scaling (WLS-MDS), trilateration, least square with distance contraction (LS-DC), particle filter (PF), and extended kalman filter (EKF). | |
| 2 | Guangliang Cheng [46] | 2012 | TOA | LOS, NLOS | Presented a new UWB-based personnel localization system for coal mines. | |
| 3 | Fischer et al. [61] | 2010 | TOA | LOS, NLOS | Designed a new monolithic integrated IR-UWB transceiver chipset with a high-precision TOA measurement unit using two-way ranging and 8-PPM modulation. | |
| 4 | Krishnan et al. [50] | 2007 | TDOA | NLOS | Used multi-cell implementation to cover large spaces, using Chan’s method to provide an accurate estimate of the mobile tag’s position within each cell. A heuristics-based approach was used to improve the accuracy at the boundaries. | |
| 5 | Rowe et al. [62] | 2013 | TDOA | Presented a new multi-tag millimeter accuracy localization system that utilize digital sampling to enhance its accuracy. | ||
| 6 | Jiang et al. [63] | 2010 | GPS | AOA, TDOA | LOS, NLOS | Provided indoor/outdoor location tracking in a hospital environment by integrating UWB and GPS technologies in one system. Ubisense solutions are used to provide a UWB infrastructure and a system and to work as location platform with a standard bidirectional time division multiple access control channel. |
| 7 | Pittet et al. [64] | 2008 | MEMS | AOA, TDOA | Combined UWB positioning with micro electro mechanical sensors (MEMS) inertial sensors in an extended Kalman filter to improve positioning and navigation performance. | |
| 8 | Shahi et al. [47] | 2012 | AOA, TDOA | LOS, NLOS | Developed a UWB positioning system for material and activity tracking in indoor construction projects and studied the effect of construction materials on performance. | |
| 9 | Segura et al. [48] | 2012 | TOA, TDOA | LOS, NLOS | Developed a UWB navigation system for mobile robot (MR) in indoor environments. Synchronization by the receivers is not required since a centralized transmitter with TDMA is used. Also, an adaptive threshold crossing algorithm is used to improve TOA estimator resistance to noise and interference. | |
| 10 | Cao and Li [65] | 2012 | AOA, TOA | LOS | Developed a new filter based algorithm to estimate the location and velocity of a target object in a real-time. | |
| 11 | Mucchi et al. [66] | 2010 | AOA, TOA | LOS | Developed an UWB real-time positioning system using Ubisense UWB solutions to provide cinematic data that helps in monitoring the performance of a professional athlete, especially after a surgery. | |
| 12 | Liu et al. [67] | 2012 | GPS | TDOA | LOS, NLOS | Developed an indoor and outdoor cooperative real-time positioning system for disaster aid missions by considering their requirements. |
| 13 | Kuhn et al. [58] | 2011 | TDMA, FPGA | TDOA | Designed a multi-tag access scheme for UWB positioning systems with millimeter range accuracy for surgical navigation which allows simultaneous tracking of up to 30 UWB tags. | |
| 14 | Zhang et al. [68] | 2010 | FPGA | TDOA, RSS | Presented a new noncoherent UWB indoor positioning system with millimeter range accuracy. | |
| 15 | Deissler et al. [69] | 2012 | MIMO | AOA | Presented a new indoor mapping system using a UWB radar and a simple mobile antenna array with one transmitter and two receivers to extract the round-trip-times. In order to cope with lack of infrastructure and prior knowledge of the surrounding environment, a Rao-Blackwellized particle filter was used for estimation algorithms. | |
| 16 | Tuchler et al. [70] | 2005 | TOA | LOS | Evaluated location accuracy of a UWB positioning system in an indoor environment showing that short transmitted pulses improve the accuracy in a multi-path environment. | |
| 17 | Jiang et al. [71] | 2012 | TOA, RSS | LOS, NLOS | Proposed a new circuit to fully integrate a non-coherent IR-UWB transceiver, which rectified the baseband pulses and provided the digitized data to the digital baseband of the receiver. | |
| 18 | Tomé et al. [72] | 2010 | TOA | LOS | Presented a large-scale deployable UWB-based indoor positioning system that relies on a developed application specific integrated circuits (ASICs) to provide a cost-competitive solution for possible future commercialization. | |
| 19 | Arias-de-Reyna and Mengali [49] | 2013 | TOA | LOS | Built a new UWB indoor positioning system which relies on a combination of the maximum likelihood principle with range error models (and special fingerprints) based on prior knowledge obtained from the service area. | |
| 20 | Kilic et al. [73] | 2013 | TOA | LOS | Proposed a new device-free stationary person detection and ranging method using existing fixed UWB infrastructure via detecting small low-frequency variations caused by a person’s presence. | |
| 21 | Mahfouz et al. [74] | 2011 | FPGA | TDOA | LOS, NLOS | Designed a millimeter range UWB indoor positioning system for medical applications using an adaptive leading-edge detection algorithm to distinguish LOS from NLOS in order to optimize the ranging algorithm accordingly. |
| 22 | McCracken et al. [75] | 2013 | CIR | RSS | NLOS | Presented a device free positioning system that uses UWB radios together with RSS sensors to localize and track people through a building. |
| 23 | Jiang et al. [76] | 2013 | TOA, TDOA | Presented a fast three dimensional node UWB positioning system that uses a modified propagator method for time delay estimation and a 3D Chan algorithm for position determination. | ||
| 24 | Yang et al. [77] | 2013 | TDOA | LOS | Proposed a space-time Bayesian compressed sensing (STBCS) algorithm for the compressed sensing UWB positioning system to decrease the ADC sampling rate and improve noise tolerance. | |
| 25 | Mirza et al. [78] | 2012 | Ultrasound sensor, compass | AOA, TDOA | LOS | Proposed a UWB indoor positioning and navigation system using Ubisense technologies to help physically disabled people to perform their daily activities. |
| 26 | Ubisense [79] | 2010 | AOA, TDOA | LOS, NLOS | Developed a UWB real-time vehicle tracking system to help dispatch managers in assigning vehicle to particular track or parking place at a yard area. | |
| 27 | Ubisense [80] | 2011 | AOA, TDOA | LOS, NLOS | Developed a UWB real-time bus tracking system that manages buses parking and driver assignments in the company’s yard area using Ubisense technology. | |
| 28 | Ubisense [81] | 2010 | AOA, TDOA | LOS, NLOS | Developed a UWB real-time positioning and tracking system for personnel safety in the oil and gas industry where devices and sensors cannot hold or produce enough energy to create sparks and should meet safety requirements. | |
| 29 | Manon kok et al. [82] | 2015 | Inertial sensor | TOA | LOS, NLOS | Designed a novel approach for UWB calibration which consider the possibility of UWB delays due to NLOS and multipath. |
| 30 | Harikrishnan Ravikrishnan [83] | 2014 | AOA, TDOA | LOS | Used a map of an assembly line to improve UWB position tracking for indoor experiments with eight Ubisense sensors where inAve are located inside a laboratory and three outside. | |
| 31 | Bharadwaj et al. [84] | 2014 | CIR, Peak detection | TOA | LOS, NLOS | Used UWB to locate body-worn sensors with different configurations and shapes. |
| 32 | Zaric et al. [85] | 2013 | Optical localization algorithm | TOA | LOS | Implemented a trilateration algorithm to calculate positions. |
| 33 | Ruiqing Ye [86] | 2012 | TDOA | LOS | Proposed new method to reduce the effect of path overlap and outperforms other methods such as first peak and search subtract and readjust (SSR) methods. | |
| 34 | Zwirello et al. [87] | 2012 | TDOA, AOA | LOS | Combined TDOA and AOA in localization systems to achieve best results. | |
| 35 | Wang and Zhang [88] | 2014 | Joint Estimation | TOA, AOA | NLOS | Used sparse representation framework for joint estimation of TOA and AOA. |
| 36 | Muller et al. [89] | 2014 | TOA | LOS, NLOS | Compared generalised Gaussian mixtures (GGM) with extended Kalman filter in nvironment with uncertainty. | |
| 37 | Leitinger et al. [90] | 2014 | RSS | NLOS | Combined maximum likelihood estimator with floor plan information to improve accuracy. | |
| 38 | Garcia et al. [91] | 2015 | TDOA | LOS, NLOS | Applied extended Kalman filter to improve accuracy in a highly complex indoor scenario. | |
| 39 | Perrat et al. [92] | 2015 | TOA, TDOA | LOS | Used Ubisense for real-time positioning of wheelchair athletics. |
| Criteria | AOA | TOA | TDOA | RSS |
|---|---|---|---|---|
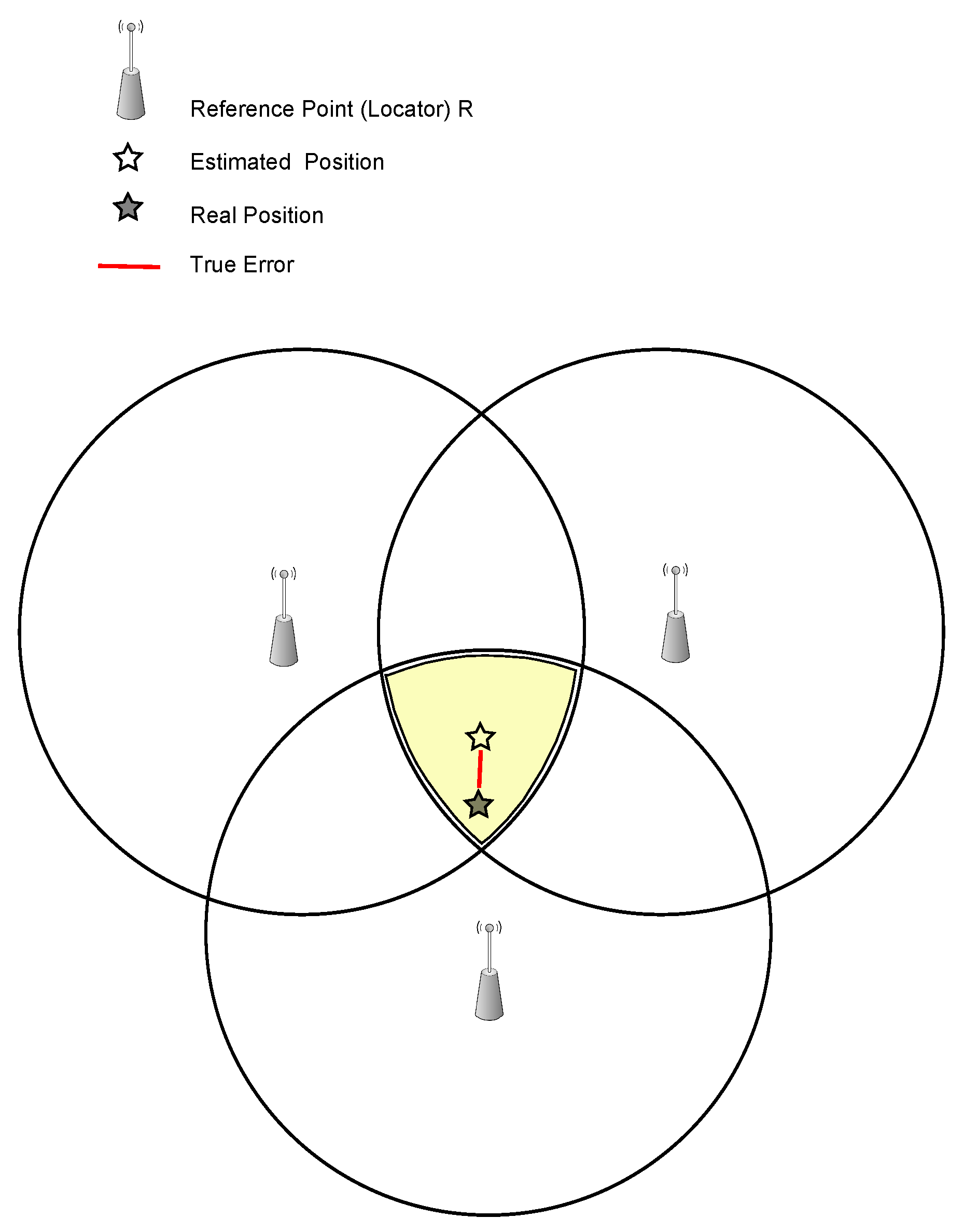
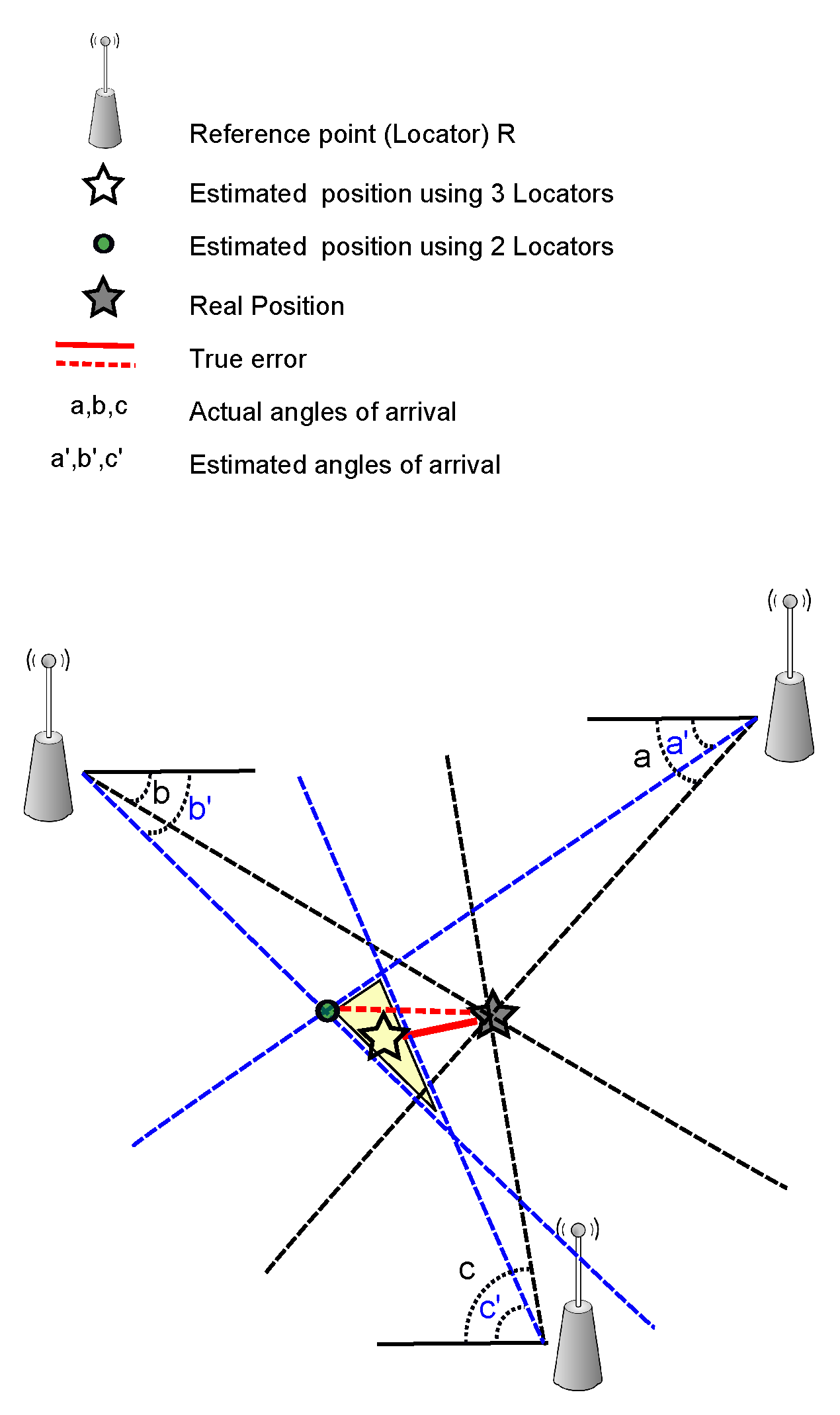
| Position Estimation | The intersection of several pairs of angle direction lines | Time taken by the signal to go from the target node to several reference nodes | The delta in time between the signal’s arrival at multiple reference nodes | The received signals strength from several reference nodes at the target node |
| The distance is directly proportional to the propagation time | The time differences are mapped to multiple intersected hyperbolas | The distance is inversely proportional to the signal strength | ||
| 2D space | At least two reference nodes | At least three reference nodes | At least three reference nodes | At least three reference nodes |
| 3D space | At least three reference nodes | At least four reference nodes | At least four reference nodes | At least four reference nodes |
| Synchronization | Lower requirement in terms of clock precision and synchronization | All transmitters and receivers in the system have to be precisely synchronized | Only the reference nodes need to be synchronized | Not required |
| Difficult and costly | ||||
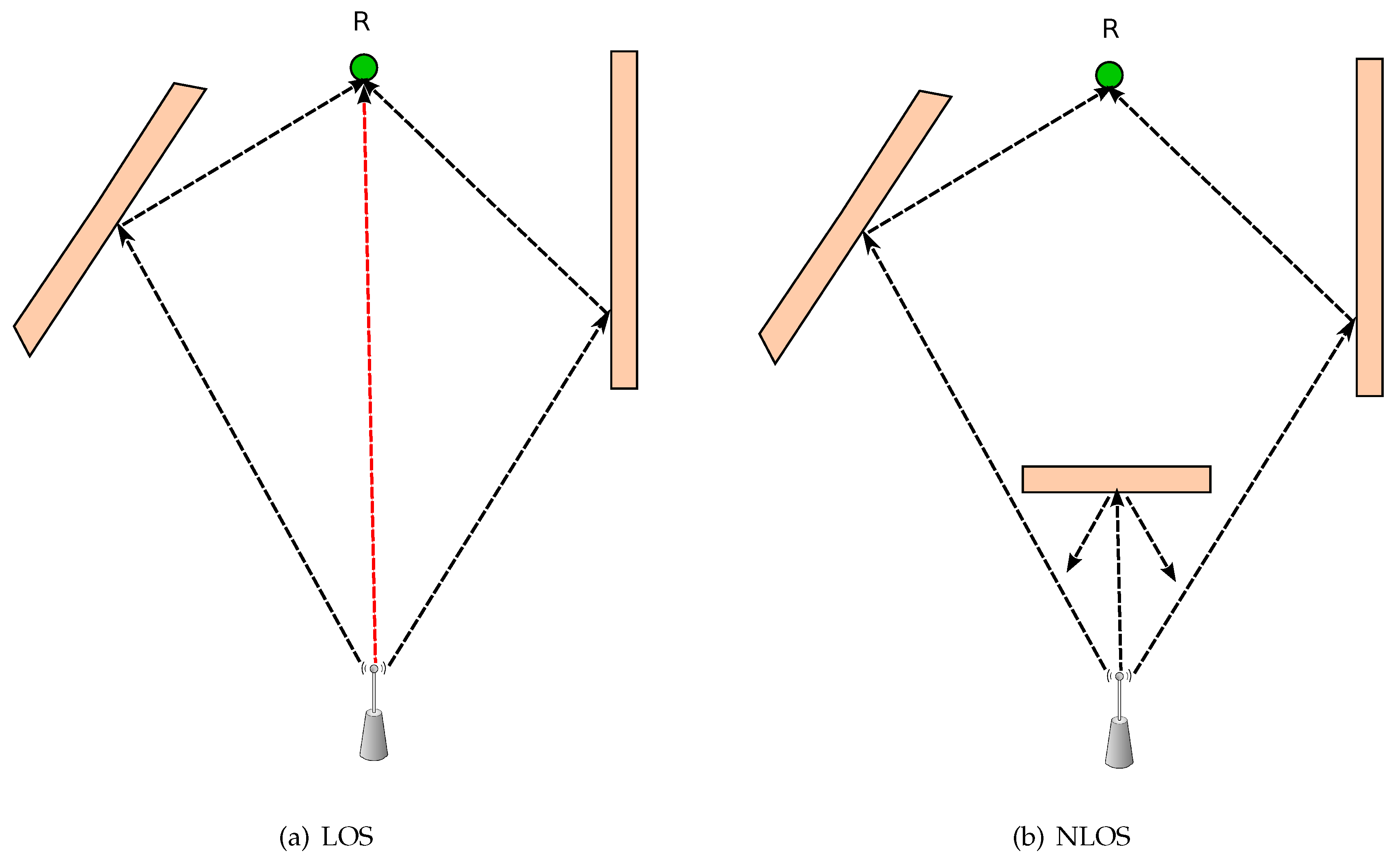
| LOS vs NLOS | Require a clear line-of-sight (LOS) between sender and receiver | Prefer LOS to reduce multipath effects | ||
| Multi-Path effects change phase of a signal and cause large position error | Great negatively affected by existence of obstacles and walls | |||
| Issues | Small errors in angle measurement will negatively impact accuracy | Relative clock drift between sender and receiver | Lower accuracy than TOA with the same system geometry | Sensitive to channel inconsistency |
| Require costly and large dimensions of antenna arrays | Require short distances between nodes |
| Internal Factors | |
| Strengths | Weaknesses |
|
|
| External Factors | |
| Opportunities | Threats |
|
|
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alarifi, A.; Al-Salman, A.; Alsaleh, M.; Alnafessah, A.; Al-Hadhrami, S.; Al-Ammar, M.A.; Al-Khalifa, H.S. Ultra Wideband Indoor Positioning Technologies: Analysis and Recent Advances. Sensors 2016, 16, 707. https://doi.org/10.3390/s16050707
Alarifi A, Al-Salman A, Alsaleh M, Alnafessah A, Al-Hadhrami S, Al-Ammar MA, Al-Khalifa HS. Ultra Wideband Indoor Positioning Technologies: Analysis and Recent Advances. Sensors. 2016; 16(5):707. https://doi.org/10.3390/s16050707
Chicago/Turabian StyleAlarifi, Abdulrahman, AbdulMalik Al-Salman, Mansour Alsaleh, Ahmad Alnafessah, Suheer Al-Hadhrami, Mai A. Al-Ammar, and Hend S. Al-Khalifa. 2016. "Ultra Wideband Indoor Positioning Technologies: Analysis and Recent Advances" Sensors 16, no. 5: 707. https://doi.org/10.3390/s16050707
APA StyleAlarifi, A., Al-Salman, A., Alsaleh, M., Alnafessah, A., Al-Hadhrami, S., Al-Ammar, M. A., & Al-Khalifa, H. S. (2016). Ultra Wideband Indoor Positioning Technologies: Analysis and Recent Advances. Sensors, 16(5), 707. https://doi.org/10.3390/s16050707