
CoDA: Collaborative Data Aggregation in Emerging Sensor Networks Using Bio-Level Voronoi Diagrams

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- Each node communicates with the maximum transmission power, and the limited node energy will be consumed quickly, thus reducing the lifetime of network.
- Large communication radius can increase the signal interference between nodes, which will affect the communication quality and reduce the network throughput.
- A lot of redundant edges exist in the generated network topology and result in network topology information redundancy. Large and complex routing calculation will bring about a waste of valuable computing resources.
- Non-uniform sparse link between nodes will impact on the network connectivity, reliability and survivability, especially in military application, which will directly affect the network security.
- Nodes’ dispersion [8]. In the face of different network applications, the nodes are distributed in two ways: predetermined and random dispersion. For the former, the data transmission can be carried out along a pre-designed path. For the latter, the distribution of nodes is not uniform and it is necessary to carry out reasonable clustering to ensure the network connectivity and energy efficiency.
- Energy consumption [9]. The lifetime of a network node depends on its battery life, and the communication and computation of the energy reserve form is very important. Because a node failure will change the topology, it may lead to the failure of the original algorithm.
- Tolerance [12]. The fault tolerance mechanism in the topology control is necessary, which can ensure the function of the network at the time some nodes out of action; for instance, lack of energy, physical damage or environmental interference.
- Connectivity [15]. The connectivity of the network is constrained by the topology changes, node failure and random distribution of nodes.
- Coverage [16]. Due to the limitation of the communication radius of the sensor nodes, the area coverage is an important problem in the topology control of wireless sensor networks, especially for the mobile WSNs.
- Data fusion [17,18]. Considering the redundancy of the data collected by monitoring nodes, data fusion can be used to reduce the energy consumption by means of decease the packets being transmitted. Besides, it can also improve data accuracy. Thus the topology design should can provides an essential support for data fusion.
- Quality of service [19,20]. In some applications, the perception of the data should be issued within a certain time interval. Otherwise the data will be invalid. Especially for some important information, the reliability of data transmission is also very important, and the topology control algorithm should be designed to meet the requirement for different quality of service.
- A literature survey about various existing energy saving protocols and topology control approaches in ESNs, and analyze their advantages and disadvantages.
- An effective bio-level Voronoi diagram model based on Voronoi-cluster and relay nodes for ESNs is proposed.
- A collaborative data aggregation in emerging sensor networks using bio-level Voronoi diagram is proposed, which is an energy-efficient data aggregation protocol and integrates topology control, MAC and routing.
- Performance analysis of the proposed algorithm and an evaluation of the algorithm with respect to other traditional routing protocols.
2. Related Works
3. System Model
- (1)
- The model is too ideal to consider many uncertain factors in practical application, which cannot meet the requirements of dynamic sensors distribution.
- (2)
- Lack of effective measurement of the dynamic and self-adaptive network topology.
- (3)
- Topology control mechanism or method should be designed in aspects of tolerance, high reliability and strong survivability.
3.1. Definition and Properties of Voronoi Cells
- (1)
- Each Voronoi node is the intersection of the three Voronoi edges. If any node in the graph make a circle, which goes through the Voronoi edges corresponding to all the vertices (three or more), cannot incorporate any other vertex. The circle with the largest radius is called the maximum empty circle.
- (2)
- For Voronoi polygons, Euler’s Regulation demonstrates that no more than six adjacent space targets can be influenced while a vertex is being deleted or added. This feature is consistent with the practical characteristics of node deployment and network topology in wireless sensor networks.
- (3)
- For the points , the edge ab is a Delaunay edge if there is a circle through a and b so that all other points of V lie outside the circle. The collection of Delaunay edges defines a plane geometric graph D(V) known as the Delaunay triangulation of V. In the non-degenerate case, which excludes four or more points on a common circle, D(V) is indeed a triangulation. Even in degenerate cases, the faces of D(V) are convex polygons, and these can be further subdivided into triangles using additional edges.
3.2. The Model of Bio-Level Voronoi Diagram
3.3. Structure of Voronoi-Cluster
- (1)
- G is a connected undirected graph without a self-circle.
- (2)
- There is at least one side between any two nodes in G.
| Algorithm 1. Determination of the minimum transmission radius for inters cluster communication. |
| Input: , Vertex set of |
| Output: minimum communication radius |
| 1. ; |
| 2. Create the Voronoi diagram V (S) of the point set; |
| 3. for each node do |
| 4. Calculate Convex Hull ; |
| 5. end for; |
| 6. for each |
| 7. if is located inside the rectangle, then |
| 8. Calculate the radius of circle with as the center; |
| 9. ; |
| 10. end for; |
| 11. for each edge |
| 12. Find the point of perpendicular and rectangular of ; |
| 13. Calculate the distance between and the endpoints of ; |
| 14. if then |
| 15. ; |
| 16. end if; |
| 17. end for; |
3.4. Formation of the Voronoi-Cluster
- Step 1:
- There are N sensor nodes and a sink node which are deployed on 2-D plane, and k cluster heads are selected by sink according to the residual energy and geographical position;
- Step 2:
- The monitoring area is divided into k Voronoi cells in terms of the cluster heads’ position;
- Step 3:
- Cluster head CHi broadcasts the message, including its residual energy and ID, to adjacent nodes. The other cluster heads which can receive the information will restore to the memory and generate their own node list, including the residual energy of the source node, and the distance between them.
- Step 4:
- Next, find out the center node among all cluster heads in a single Voronoi cell. The center node sends Center Declare Message (CDM) to other cluster heads, and adds the nodes to the set by .
- Step 5:
- After working for some time, if ,, node u will give up the role of center node and notify all cluster heads of the set.
- Step 6:
- Calculate the distance between all adjacent cluster heads. If , combine the Voronoi cells with adjacent cluster heads and constitute the links for all member nodes.
- Step 7:
- All cluster heads send Active Dynamic Information (ADI) message to others periodically. Once a cluster head failures, other cluster heads can perceive quickly and then output the backup set. The partition of the link caused by cluster head failure can be fixed as far as possible, so as to reduce the loss of data and ensure the reliability of transmission.
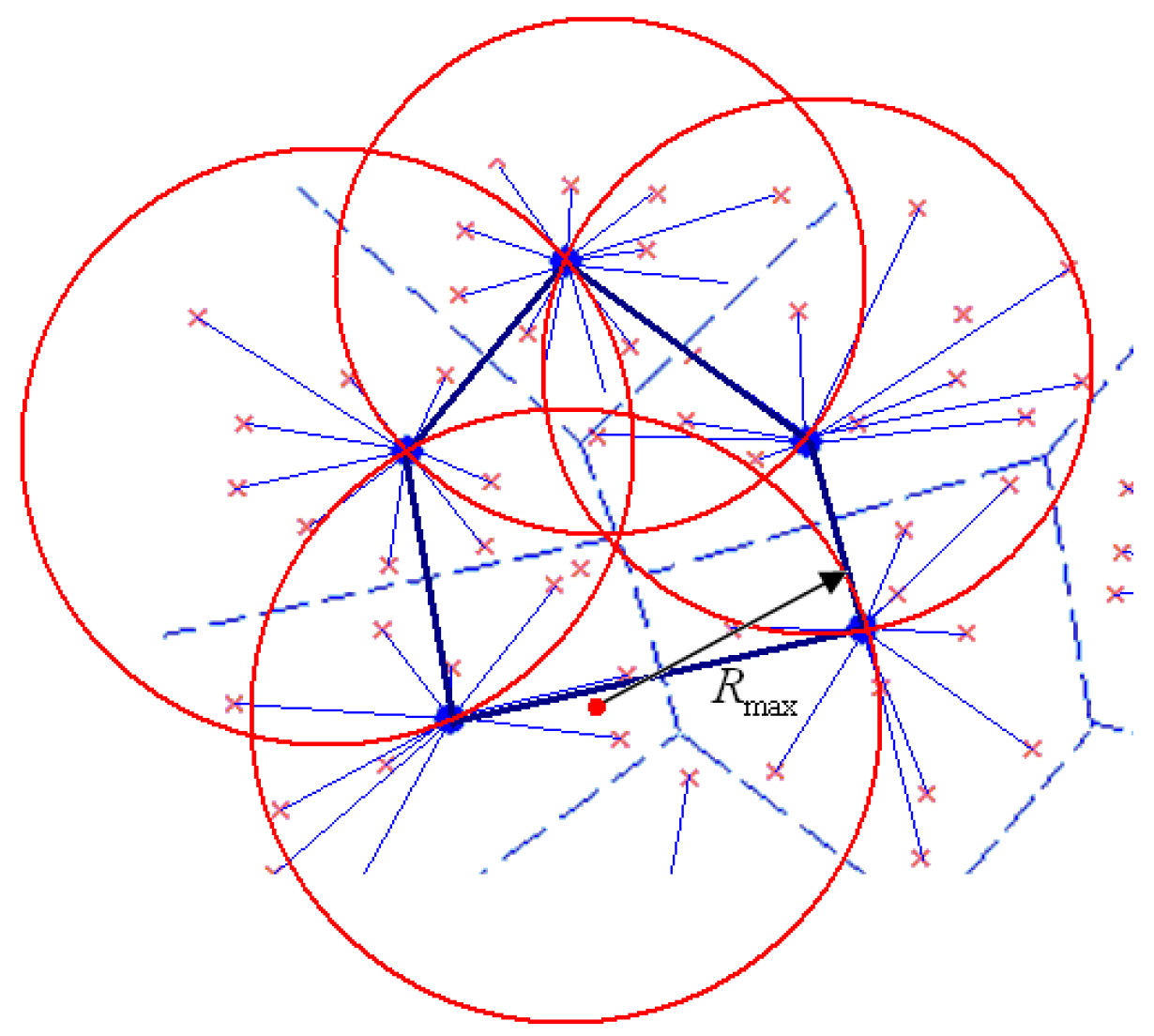
3.5. Deployment of Relay Nodes
| Algorithm 2. Determination of the minimum communication radius of inters cluster communication. |
| Input: the sensor node set , the number of cluster head k. |
| Output: the set of relay nodes RS. |
| 1. Suppose all nodes in the set as generic point, generates the corresponding k order Voronoi diagram ; |
| 2. The set of polygon for Voronoi diagram is denoted as , where is the i-th polygon for ; |
| 3. ; |
| 4. while do |
| 5. for each do |
| 6. if is the generic point of polygon then |
| 7. record the occurrence time of node ; |
| 8. end if; |
| 9. end for; |
| 10. Find out the which denotes the maximum number of occurrences of generic point; |
| 11. The node can be added in the set of ; |
| 12. ; |
| 13. end while. |
4. Multi-Hop Transmission and Synchronization
4.1. Fitness Function
4.2. Initialization of Particle Swarm Optimization
- Step 1:
- Initialize the particle i per dimension with random velocity ;
- Step 2:
- Mapping particle i routing tree;
- Step 3:
- According to the routing tree can obtain and ;
- Step 4:
- Calculate the fitness value of each particle;
- Step 5:
- Finding the individual extreme value and the global extreme value ;
- Step 6:
- Update the speed and position of the particles and make the corresponding adjustment;
- Step 7:
- Repeat Steps 2 to 6 until the threshold number of iterations;
- Step 8:
- According to the individual extreme value and the global extreme value in Step 5, the optimal path from node i to the relay node can be determined.
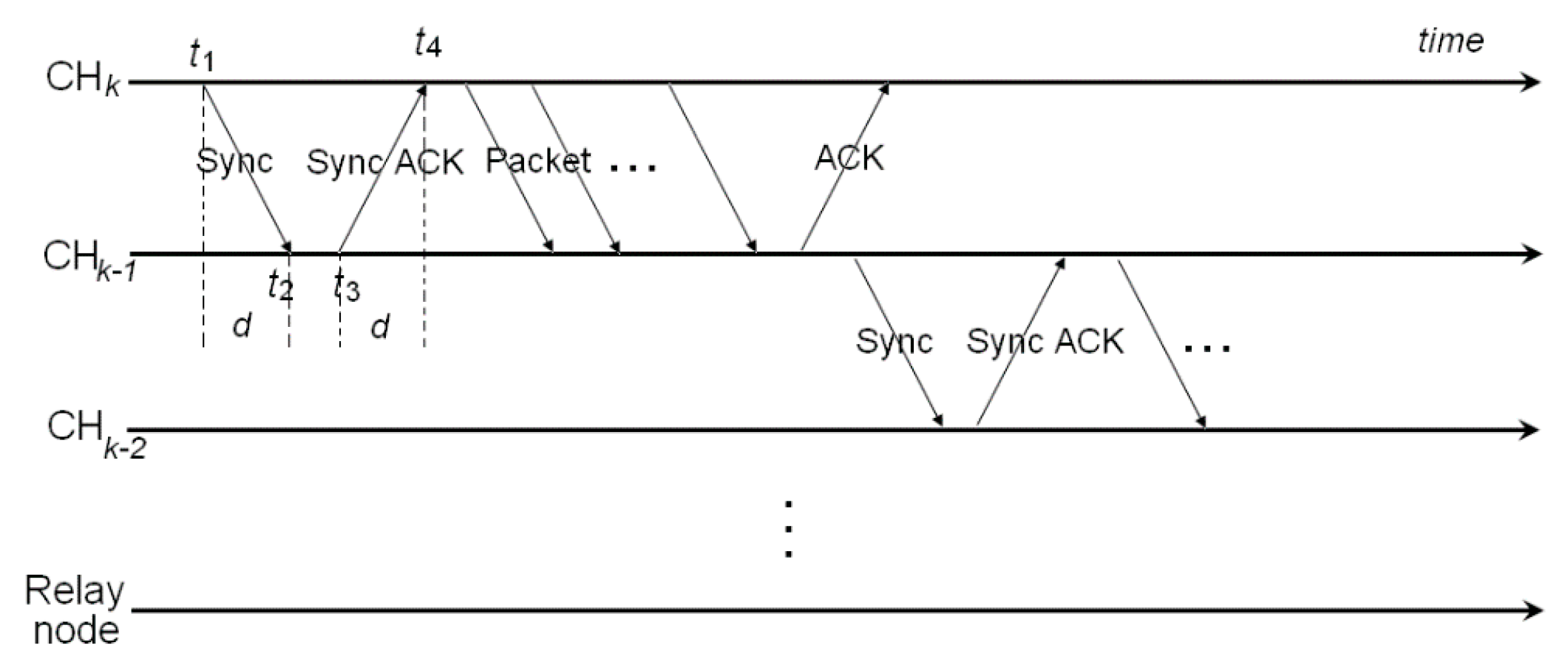
4.3. Precision Time Synchronization Model
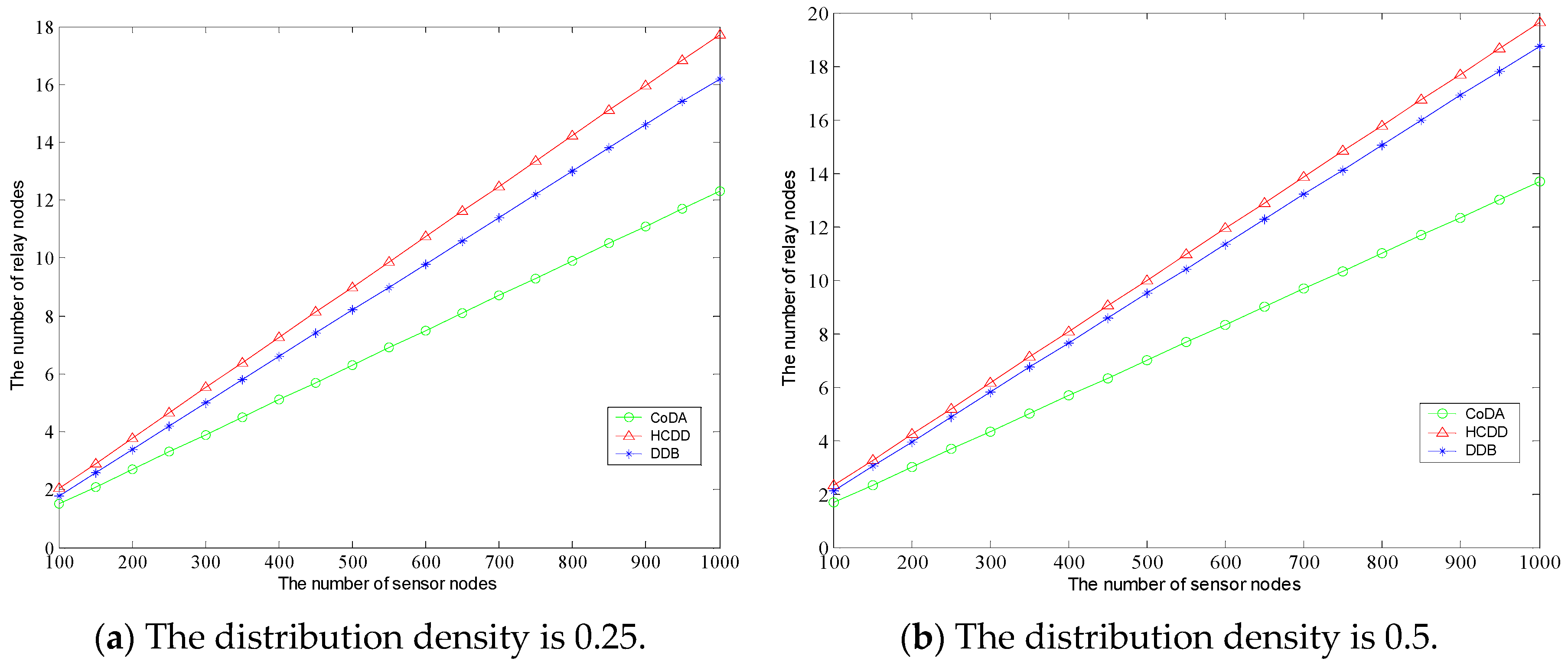
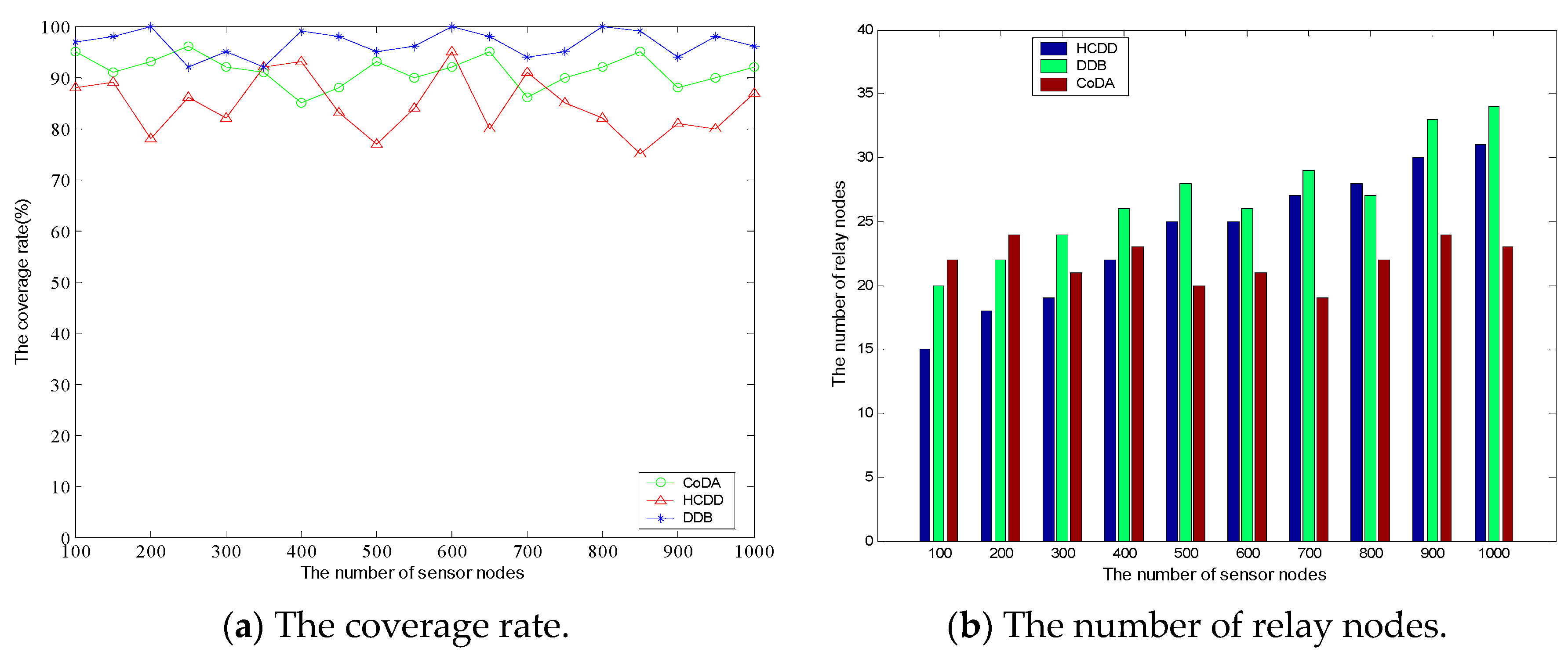
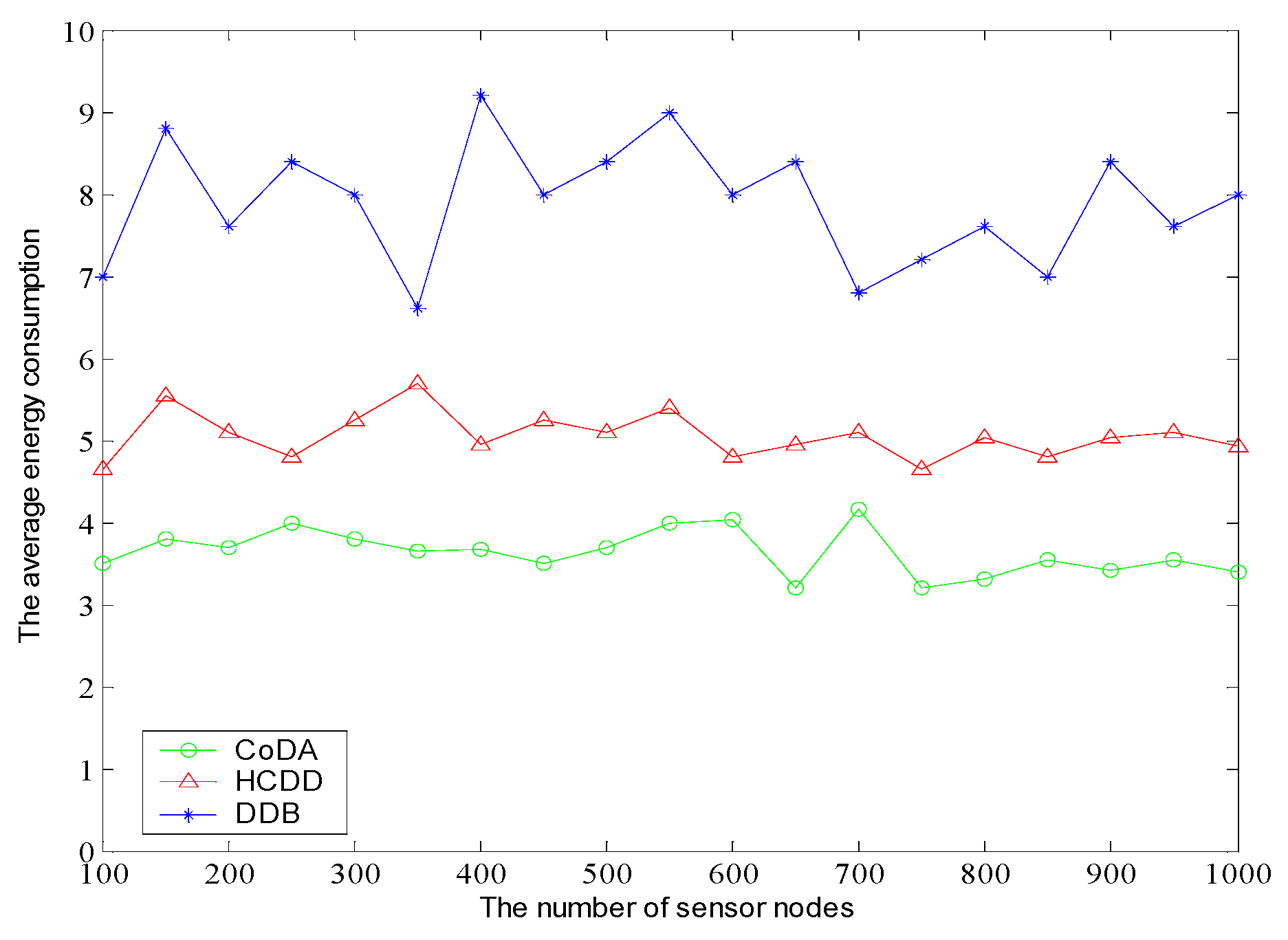
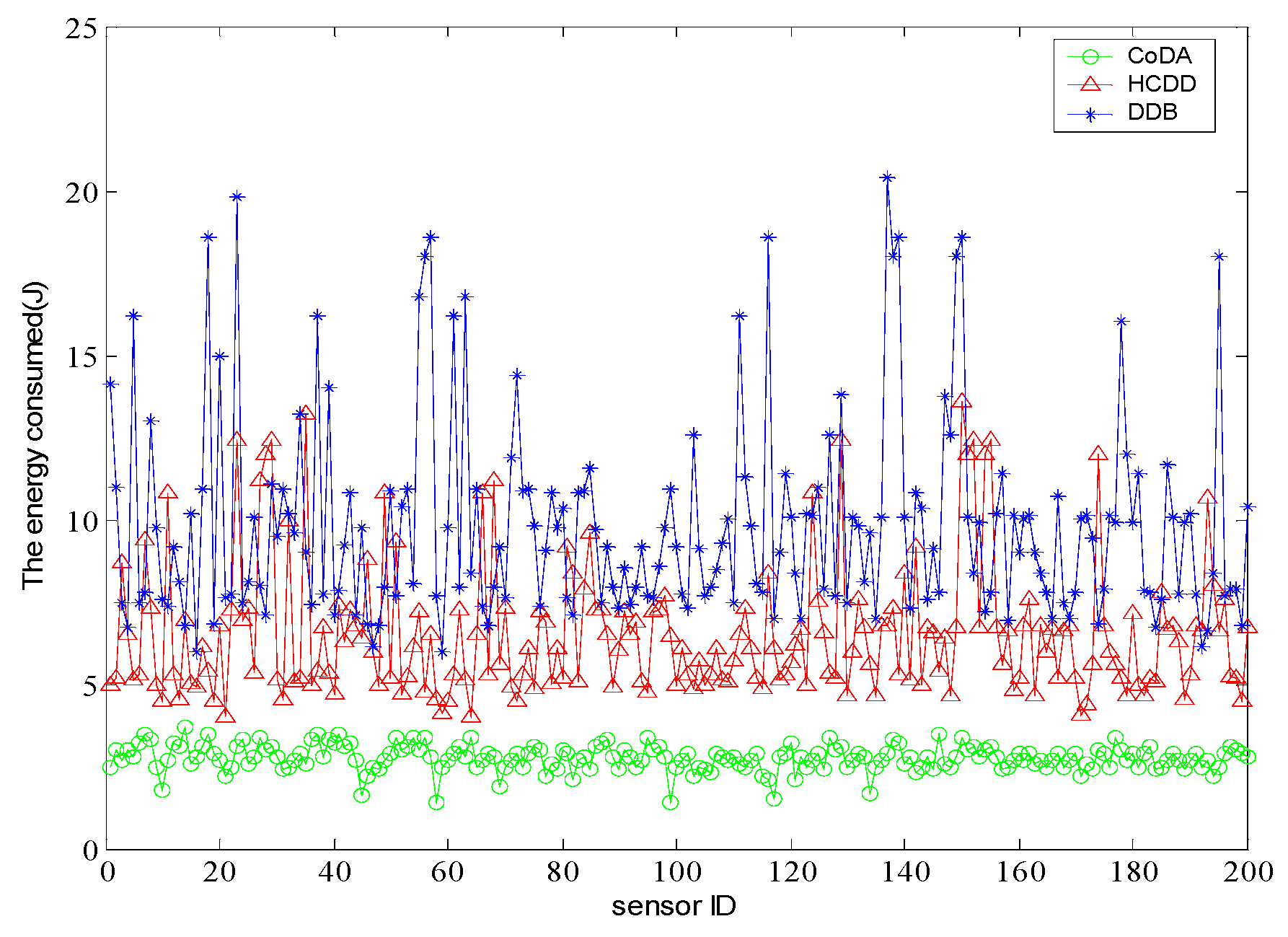
5. Simulation Results
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Akyildiz, I.F.; Melodia, T.; Chowdury, K.R.Y. Wireless multimedia sensor networks: A survey. IEEE Wirel. Commun. 2007, 14, 32–39. [Google Scholar] [CrossRef]
- Winkler, M.; Tuchs, K.-D.; Hughes, K.; Barclay, G. Theoretical and practical aspects of military wireless sensor networks. J. Telecommun. Inf. Technol. 2008, 2, 37–45. [Google Scholar]
- Holman, R.; Stanley, J.; Ozkan-Haller, T. Applying Video Sensor Networks to Nearshore Environment Monitoring. IEEE Pervasive Comput. 2003, 2, 14–21. [Google Scholar] [CrossRef]
- Cayirci, E.; Coplu, T. SENDROM: Sensor networks for disaster relief operations management. Wirel. Netw. 2007, 13, 409–423. [Google Scholar] [CrossRef]
- Mohamed, N.; Al-Jaroodi, J.; Jawhar, I. A Cost-Effective Design for Combining Sensing Robots and Fixed Sensors for Fault-Tolerant Linear Wireless Sensor Networks. Int. J. Distrib. Sens. Netw. 2014, 20, 1–11. [Google Scholar] [CrossRef]
- Shaikh, R.A.; Jameel, H.; d’Auriol, B.J.; Lee, H.; Lee, S.; Song, Y.-J. Group-based trust management scheme for clusteredwireless sensor networks. IEEE Trans. Parallel Distrib. Syst. 2009, 20, 1698–1712. [Google Scholar] [CrossRef]
- Dandekar, D.R.; Deshmukh, P.R. Energy balancing multiple sink optimal deployment in multi-hop wireless sensor net-works. In Proceedings of the 3rd International Advance Computing Conference (IACC ’13), IEEE, Ghaziabad, India, 22−23 February 2013; pp. 408–412.
- Caillouet, C.; Pérennes, S.; Rivano, H. Framework for optimizing the capacity of wireless mesh networks. Comput. Commun. 2011, 34, 1645–1659. [Google Scholar] [CrossRef]
- Shih, K.-P.; Wang, S.-S.; Chen, H.-C.; Yang, P.-H. Collect: Collaborative event detection and tracking in wireless heterogeneous sensor networks. Comput. Commun. 2008, 31, 3124–3136. [Google Scholar] [CrossRef]
- Martina, V.; Garetto, M.; Leonardi, E. Capacity scaling of large wireless networks with heterogeneous clusters. Perform. Eval. 2010, 67, 1203–1218. [Google Scholar] [CrossRef]
- Haenggi, M.; Andrews, J.; Baccelli, F.; Dousse, O.; Franceschetti, M. Stochastic geometry and random graphs for the analysis and design of wireless networks. IEEE J. Sel. Areas Commun. 2009, 27, 1029–1046. [Google Scholar] [CrossRef]
- Carli, R.; Chiuso, A.; Schenato, L.; Zampieri, S. Distributed Kalman filtering based on consensus strategies. IEEE J. Sel. Areas Commun. 2008, 26, 18–27. [Google Scholar] [CrossRef]
- Ingelrest, F.; Barrenetxea, G.; Schaefe, G.; Vetterli, M.; Couach, O.; Parlange, M. Sensor scope: Application-specific sensor network for environmental monitoring. ACM Trans. Sens. Netw. (TOSN) 2010, 6, 17–21. [Google Scholar]
- Kong, Z.; Yeh, E.M. Information dissemination in large-scale wireless networks with unreliable links. In Proceedings of the 4th Annual International Conference on Wireless Internet, Maui, HI, USA, 17–19 November 2014; pp. 321–329.
- Thai, M.T.; Zhang, N.; Tiwari, R.; Xu, X. On approximation algorithms of k-connected m-dominating sets in disk graphs. Theor. Comput. Sci. 2007, 385, 49–59. [Google Scholar] [CrossRef]
- Almahorg, K.A.; Naik, S.; Shen, X. Efficient localized protocols to compute connected dominating sets for Ad Hoc networks. In Proceedings of the IEEE Global Communications Conference (Globecom 2010), Miami, FL, USA, 6–10 December 2010; pp. 1–5.
- Ji, S.; He, J.; Pan, Y. Continuous data aggregation and capacity in probabilistic wireless sensor networks. J. Parallel Distrib. Comput. 2013, 73, 729–745. [Google Scholar] [CrossRef]
- Lee, U.; Magistretti, E.; Gerla, M.; Bellavista, P.; Corradi, A. Dissemination and harvesting of urban data using vehicular sensing platforms. IEEE Trans. Veh. Technol. 2009, 58, 882–901. [Google Scholar]
- Chen, L.; Wei, S. Throughput capacity of hybrid multi-channel wireless networks. AEU-Int. J. Electron. Commun. 2010, 64, 299–303. [Google Scholar] [CrossRef]
- Ramamurthi, V.; Reaz, A.; Ghosal, D. Channel, capacity, and flow assignment in wireless mesh networks. Comput. Netw. 2011, 55, 2241–2258. [Google Scholar] [CrossRef]
- Larsson, A.; Tsigas, P. A self-stabilizing (k,r)-clustering algorithm with multiple paths for wireless Ad-hoc networks. In Proceedings of the 31st International Conference on Distributed Computing Systems (ICDCS 2011), Minneapolis, MN, USA, 20−24 June 2011; pp. 353–362.
- Heinzelman, W.R.; Chandrakasan, A.P.; Balakrishnan, H. An Application-Specific Protocol Architecture for Wireless Microsensor Networks. IEEE Trans. Wirel. Commun. 2002, 1, 660–670. [Google Scholar] [CrossRef]
- Younis, O.; Fahmy, S. HEED: A hybrid, energy-efficient, distributed clustering approach for Ad hoc sensor networks. IEEE Trans. Mob. Comput. 2004, 3, 366–379. [Google Scholar] [CrossRef]
- Gamwarige, S.; Kulasekere, E. An algorithm for energy driven cluster head rotation in a distributed wireless sensor network. In Proceedings of the International Conference on Information and Automation (ICIA2005), Colombo, Sri Lanka, 15–18 December 2005; pp. 354–359.
- Xu, J.; Guo, L.; Tai, D. The Algorithm of Threshold Model Based on LEACH. Microelectron. Comput. 2011, 28, 131–134. [Google Scholar]
- Chen, B.; Shi, Y. WSN Routing Protocol Based on Cluster Heads Selection in Regions. Comput. Eng. 2011, 37, 96–98. [Google Scholar]
- Zhang, P.; Jiang, Y.; Chen, L. Routing Protocol Based on Optimizing Choosing Two Levels Clusters for Wireless Sensor Network. Chin. J. Sens. Actuators 2011, 24, 447–451. [Google Scholar]
- Feng, D.; Li, G.; Quan, J.; Jin, J. Reliability of wireless sensor networks based on redundancy of cluster heads. J. Zhejiang Univ. (Eng. Sci.) 2009, 43, 849–854. [Google Scholar]
- Deng, H.; Li, L.; Huang, H.; Yuan, X.; Wang, Y. Energy Consumption Analysis and Improvement Strategy for Cluster-Head Rotation in Wireless Sensor Networks. J. Shanghai Jiaotong Univ. 2011, 45, 317–326. [Google Scholar]
- Dilip, K.; Trilok, C.A.; Patel, R.B. EEHC: Energy efficient heterogeneous clustered scheme for wireless sensor networks. Comput. Commun. 2009, 32, 662–667. [Google Scholar]
- Olariu, S.; Stojmenovic, I. Design guidelines for maximizing lifetime and avoiding energy holes in sensor networks with uniform distribution and uniform reporting. In Proceedings of IEEE INFOCOM, Barcelona, Spain, 23–29 April 2006; pp. 1–12.
- Sarikaya, Y.; Atalay, I.C.; Gurbuz, O. Estimating the channel capacity of multi-hop IEEE 802.11 wireless networks. Ad Hoc Netw. 2012, 10, 1058–1075. [Google Scholar] [CrossRef]
- Xu, J.; Bi, W.; Zhu, J.; Zhao, H. Design & Simulation of WSN Equal-cluster-based Multi-hop Routing Algorithm. J. Syst. Simul. 2011, 23, 992–997. [Google Scholar]
- Bi, X.; Guo, W.; Feng, W. Energy-efficient clustering multi-hop routing algorithm for wireless sensor networks. J. Circuits Syst. 2011, 16, 13–18. [Google Scholar]
- Wang, H.; Cheng, H. Energy Cost Optimization Model for Multi-hop Routing Protocol Based Clustering in Wireless Sensor Networks. J. Syst. Simul. 2014, 26, 1021–1025. [Google Scholar]
- Shang, F.; Ren, D. A Distributed Multi-Hop Routing Algorithm in Wireless Sensor Networks. Chin. J. Sens. Actuators 2012, 25, 529–535. [Google Scholar]
- Baccelli, F.; Gloaguen, C.; Zuyev, S. Superposition of planar voronoi tessellations. Commun. Stat. Stoch. Models. 2000, 16, 69–98. [Google Scholar] [CrossRef]
- Kim, K.; Lee, B.G. Kalp: A Kalman filter-based adaptive clock method with low pass prefiltering for packet networks use. IEEE Trans. Commun. 2000, 48, 1217–1225. [Google Scholar]
- Du, Q.; Wang, D. Anisotropic centroidal Voronoi tessellations and their applications. SIAM. J. Sci. Comput. 2005, 26, 737–761. [Google Scholar] [CrossRef]
- Du, Q.; Gunzburger, M. Grid generation and optimization based on centroidal Voronoi tessellations. Appl. Math. Comput. 2002, 133, 591–607. [Google Scholar] [CrossRef]
- Mayya, N.; Rajan, V.T. Voronoi diagrams of polygons: a framework for shape representation. J. Math. Imaging Vis. 1994, 4, 638–643. [Google Scholar]
- Wolf, S.; Merz, P. Evolutionary local search for the minimum energy broadcast problem. In Proceedings of the 8th European Conference, EvoCOP 2008, Naples, Italy, 26–28 March 2008; pp. 61–72.
- Rajesh, H.; Kulkarni, V.A. En-LEACH Routing Protocol for Wireless Sensor Network. Int. J. Eng. Res. Appl. 2012, 2, 2099–2102. [Google Scholar]
- Morteza, O.; Mohsen, S.; Hossein, M. Task allocation to actors in wireless sensor actor networks: An energy and time aware technique. Proced. Comput. Sci. 2011, 1, 484–490. [Google Scholar]
- Zeynali, M.; Khanli, L.M.; Mollanejad, A. TBRP: Novel Tree Based Routing Protocol in Wireless Sensor Network. Int. J. Grid Distrib. Comput. 2009, 2, 35–48. [Google Scholar]
- Balasangameshwara, J.; Raju, N. Performance-driven load balancing with primary backup approach for computational grids with low communication cost and replication cost. IEEE Trans. Comput. 2013, 62, 990–1003. [Google Scholar] [CrossRef]
- Lin, C.; Chou, P.; Chou, C. HCDD: Hierarchical cluster-based data dissemination in wireless sensor networks with mobile sink. In Proceedings of the 2006 international conference on Wireless communications and mobile computing, Vancouver, BC, Canada, 3–6 July 2006; pp. 1021–1025.
- Lu, J.L.; Valois, F. On the data dissemination in WSNs. In Proceedings of the IEEE WIMOB, White Plains, NY, USA, 8–10 October 2007; pp. 56–62.
- Zhao, J.; Zeng, J.C. A virtual centripetal force-based coverage-enhancing algorithm for wireless multimedia sensor networks. IEEE Sens. J. 2010, 10, 1328–1334. [Google Scholar]
- Zhu, C.; Zheng, C.; Shu, L.; Han, G. A survey on coverage and connectivity issues in wireless sensor networks. J. Netw. Comput. Appl. 2012, 35, 619–632. [Google Scholar] [CrossRef]
- Yao, Y.; Yang, L.T.; Xiong, N.N. Anonymity-Based Privacy-Preserving Data Reporting for Participatory Sensing. IEEE Int. Things J. 2015, 2, 381–390. [Google Scholar] [CrossRef]
- Tang, C.; Shokla, S.K.; Modhawar, G.; Wang, Q. An Effective Collaborative Mobile Weighted Clustering Schemes for Energy Balancing in Wireless Sensor Networks. Sensors 2016, 16, 261. [Google Scholar] [CrossRef] [PubMed]














© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, C.; Yang, N. CoDA: Collaborative Data Aggregation in Emerging Sensor Networks Using Bio-Level Voronoi Diagrams. Sensors 2016, 16, 1235. https://doi.org/10.3390/s16081235
Tang C, Yang N. CoDA: Collaborative Data Aggregation in Emerging Sensor Networks Using Bio-Level Voronoi Diagrams. Sensors. 2016; 16(8):1235. https://doi.org/10.3390/s16081235
Chicago/Turabian StyleTang, Chengpei, and Nian Yang. 2016. "CoDA: Collaborative Data Aggregation in Emerging Sensor Networks Using Bio-Level Voronoi Diagrams" Sensors 16, no. 8: 1235. https://doi.org/10.3390/s16081235
APA StyleTang, C., & Yang, N. (2016). CoDA: Collaborative Data Aggregation in Emerging Sensor Networks Using Bio-Level Voronoi Diagrams. Sensors, 16(8), 1235. https://doi.org/10.3390/s16081235