
A Sparsity-Promoted Decomposition for Compressed Fault Diagnosis of Roller Bearings


Abstract
:1. Introduction
2. Theoretical Background
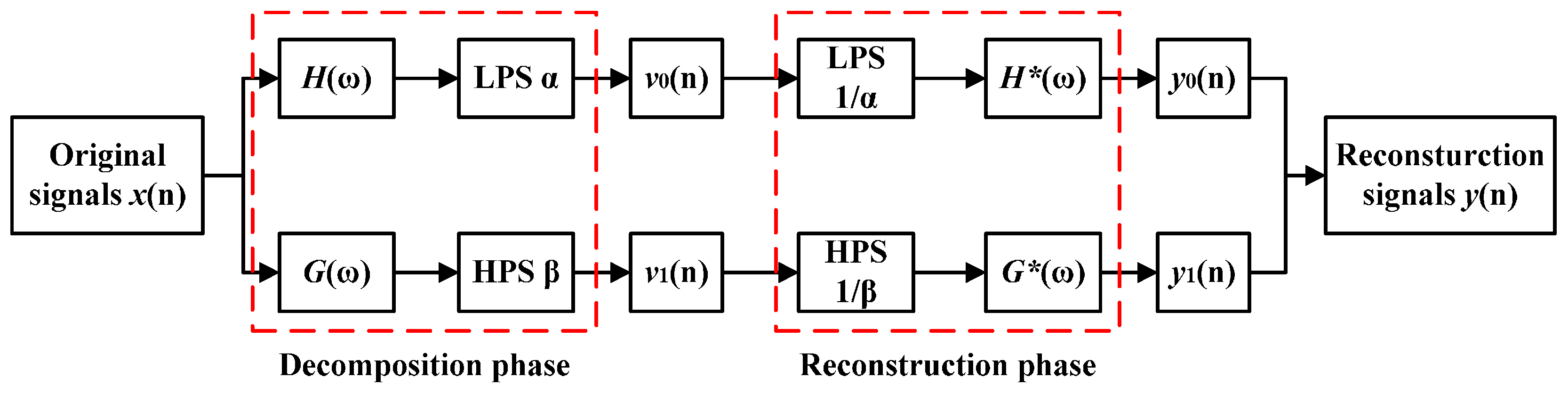
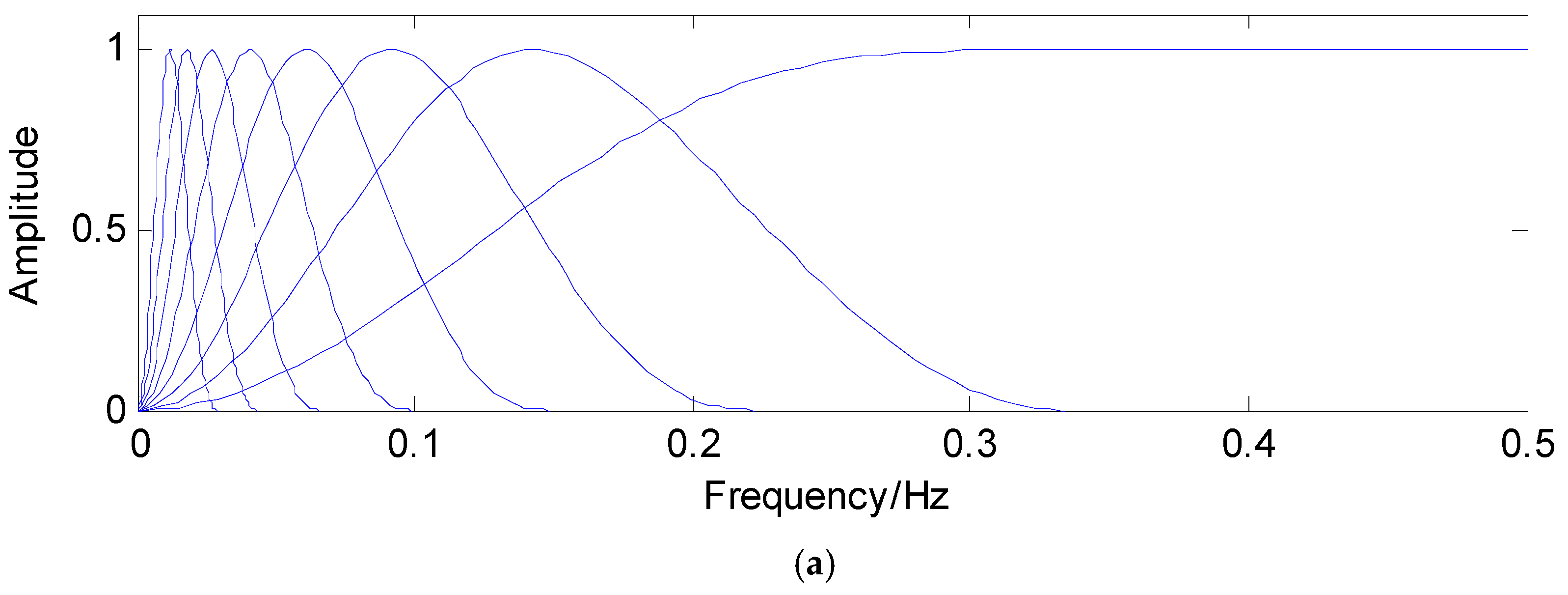
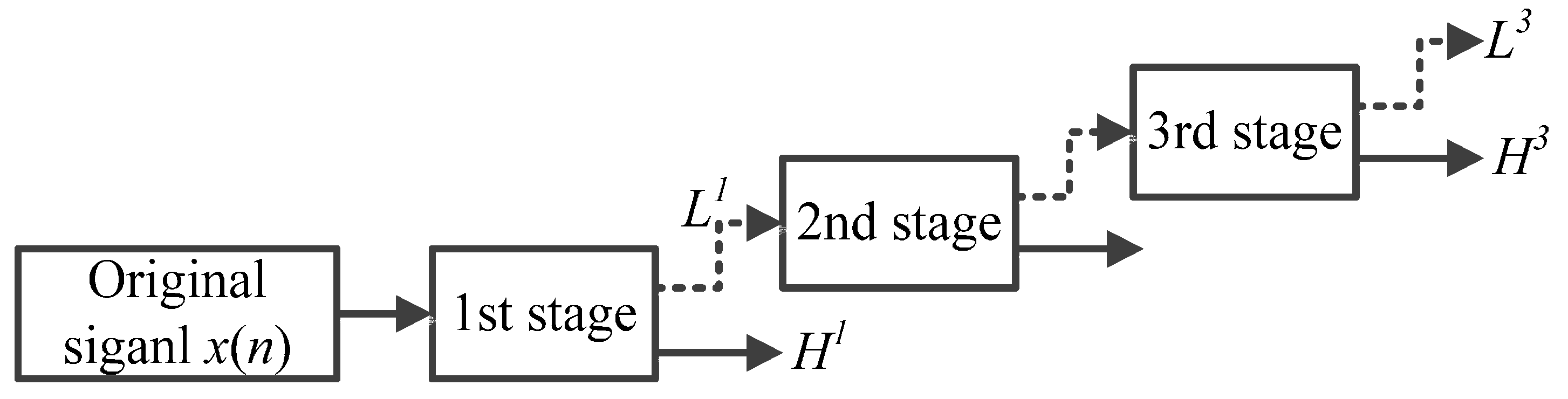
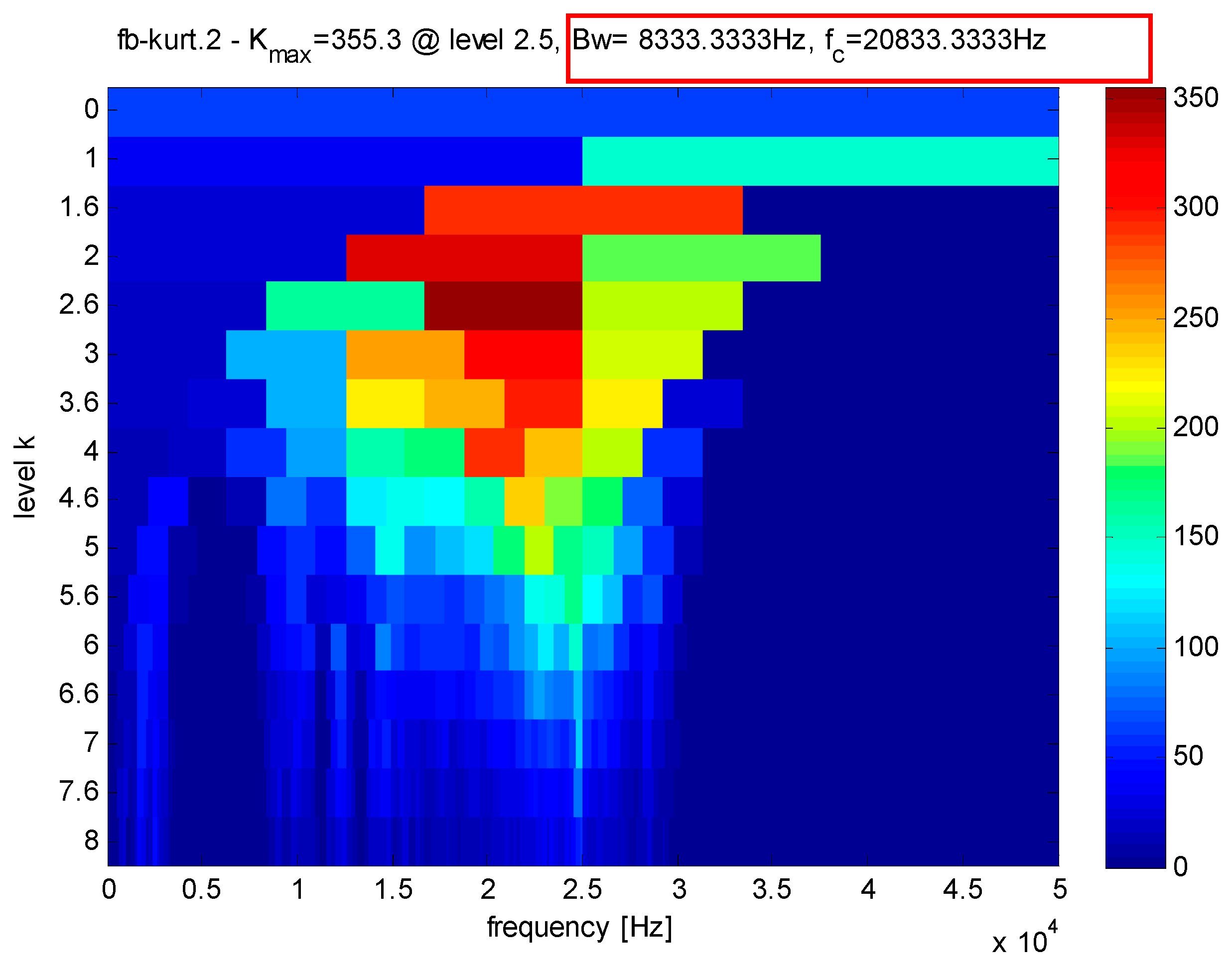
2.1. Tunable Q-Factor Wavelet Transform
2.2. Basic Idea of the Compressed Sensing Theory
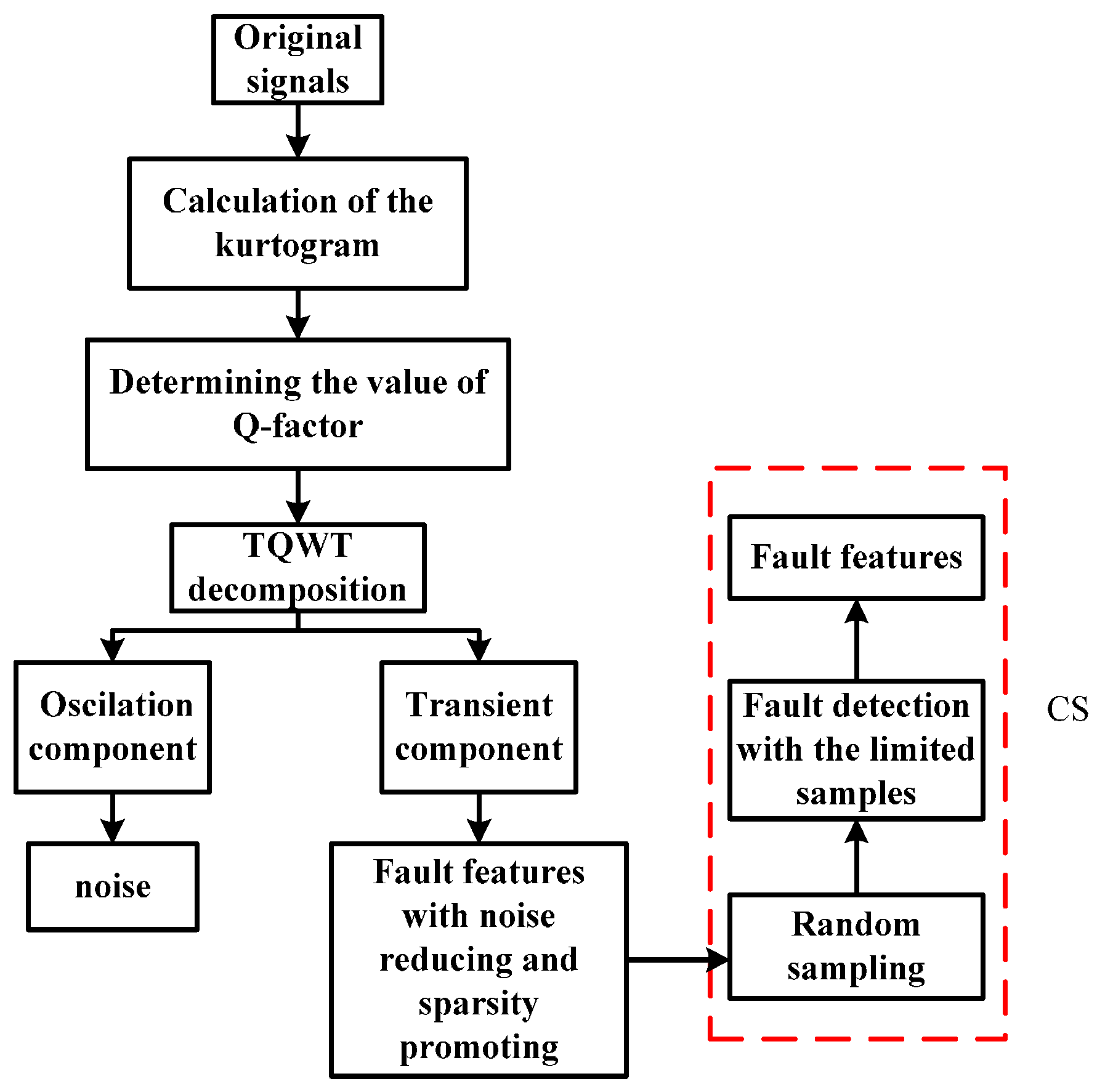
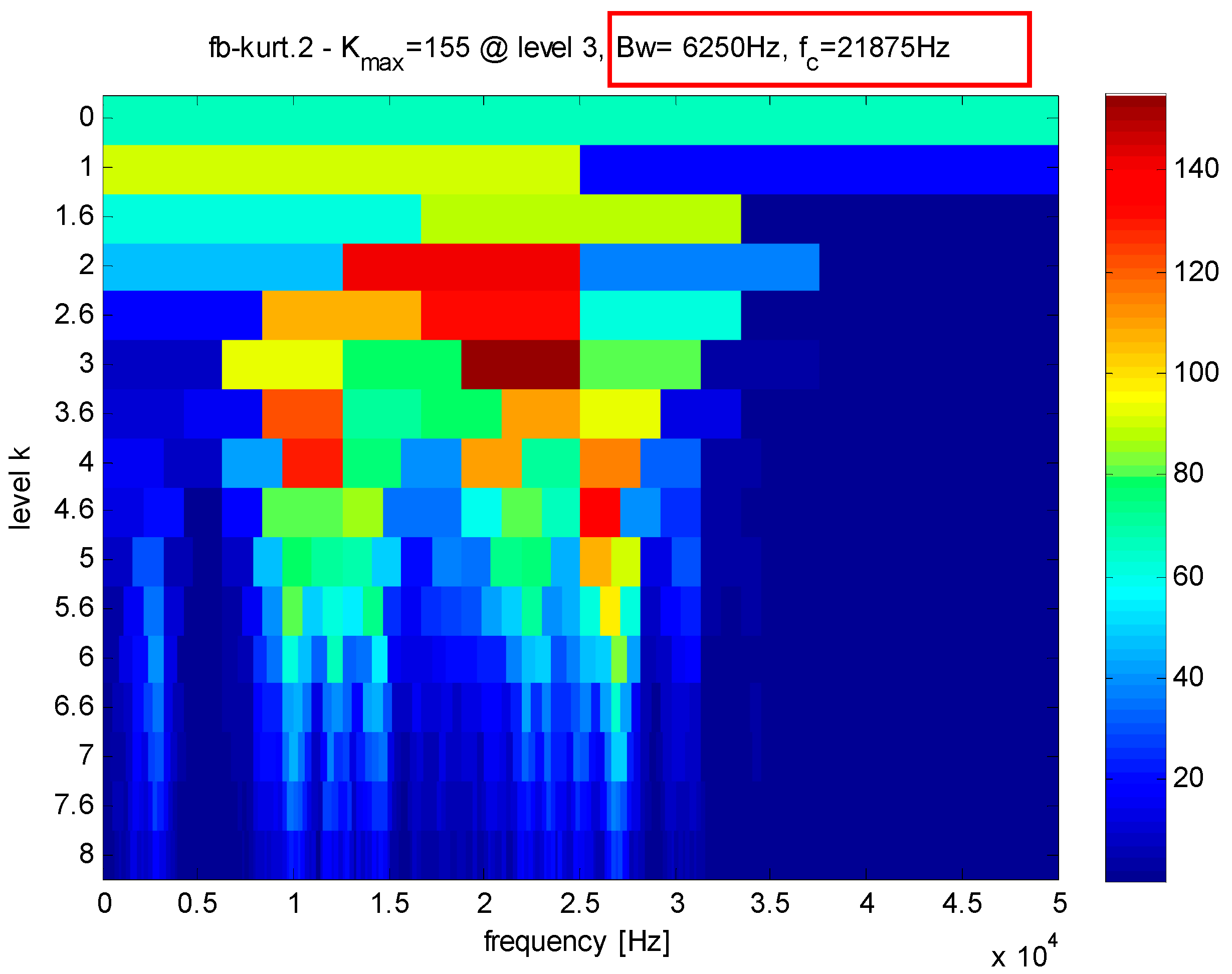
3. The Proposed Fault Detection Method
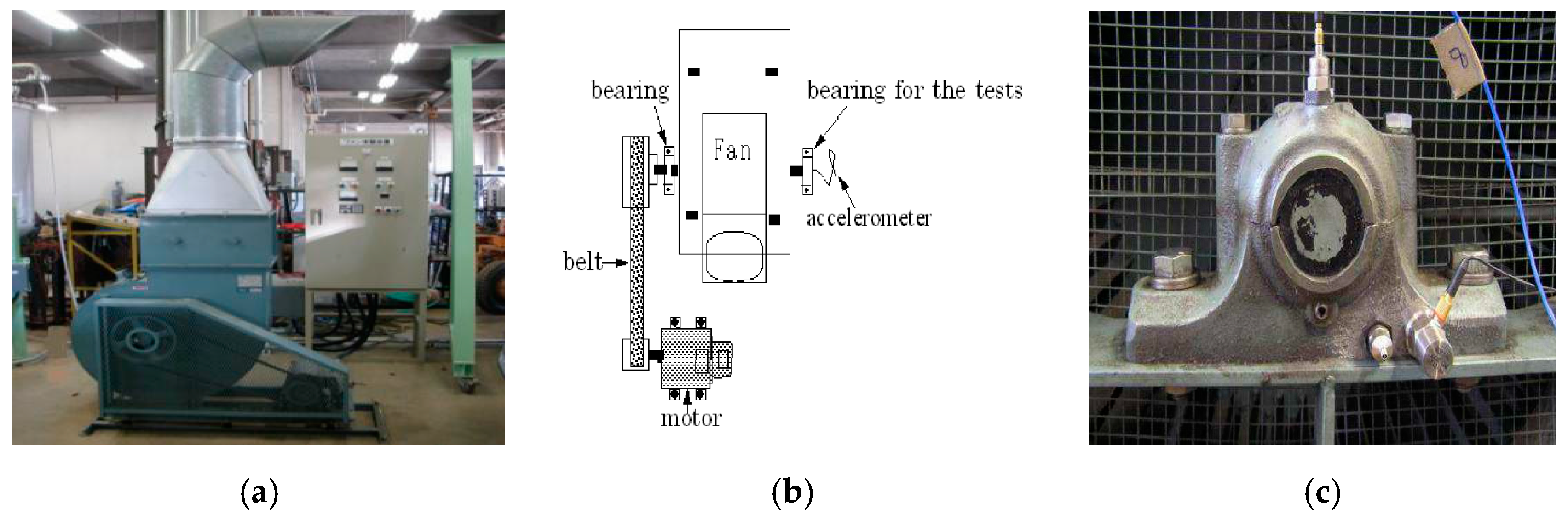
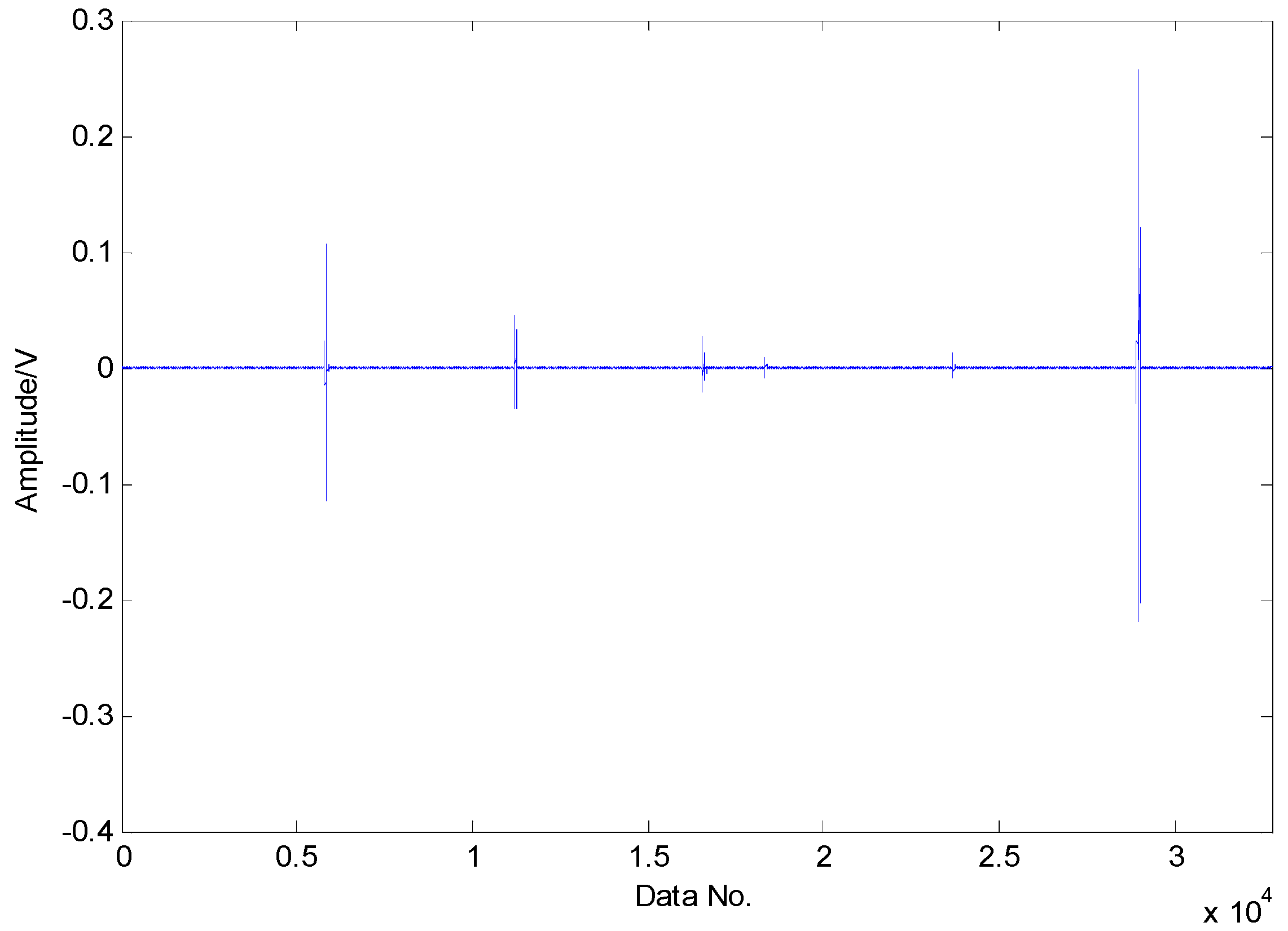
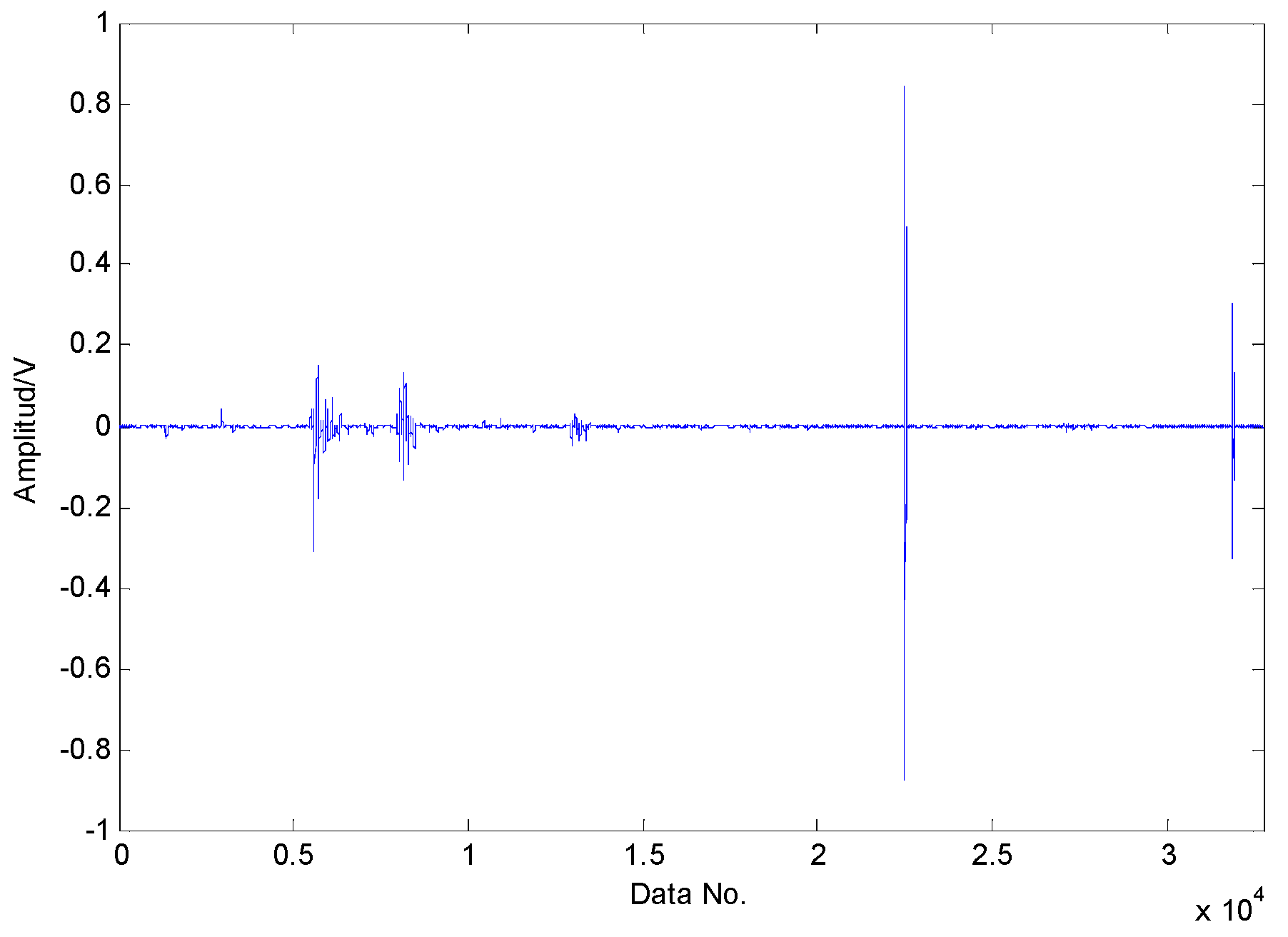
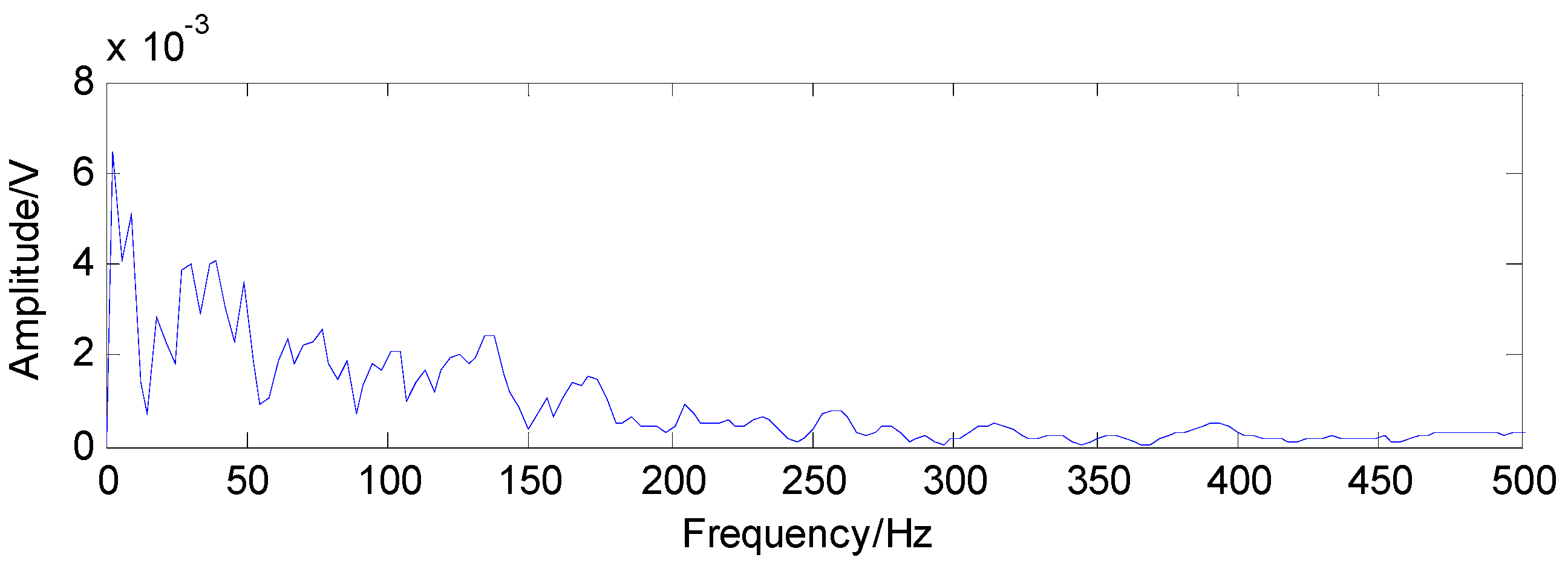
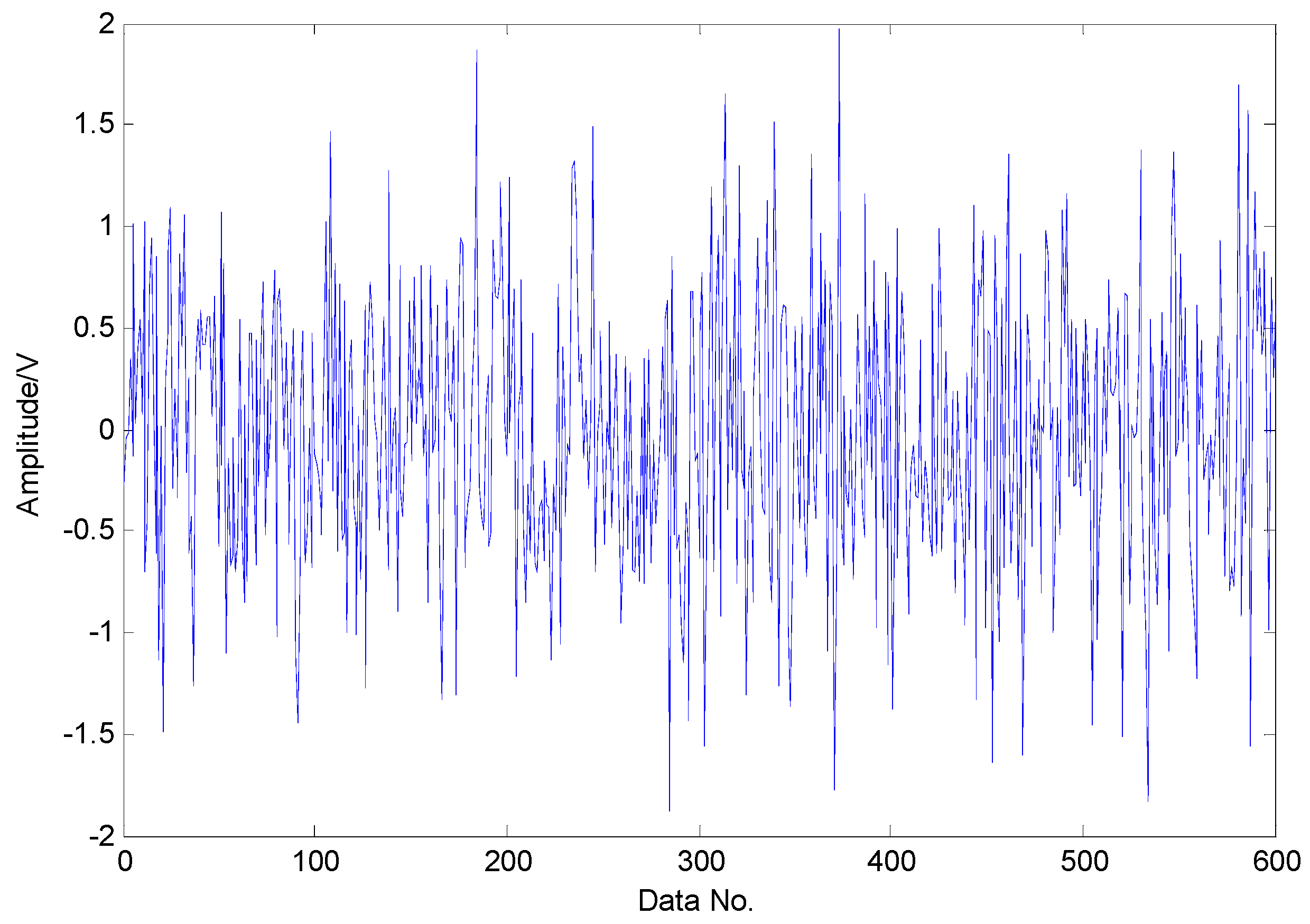
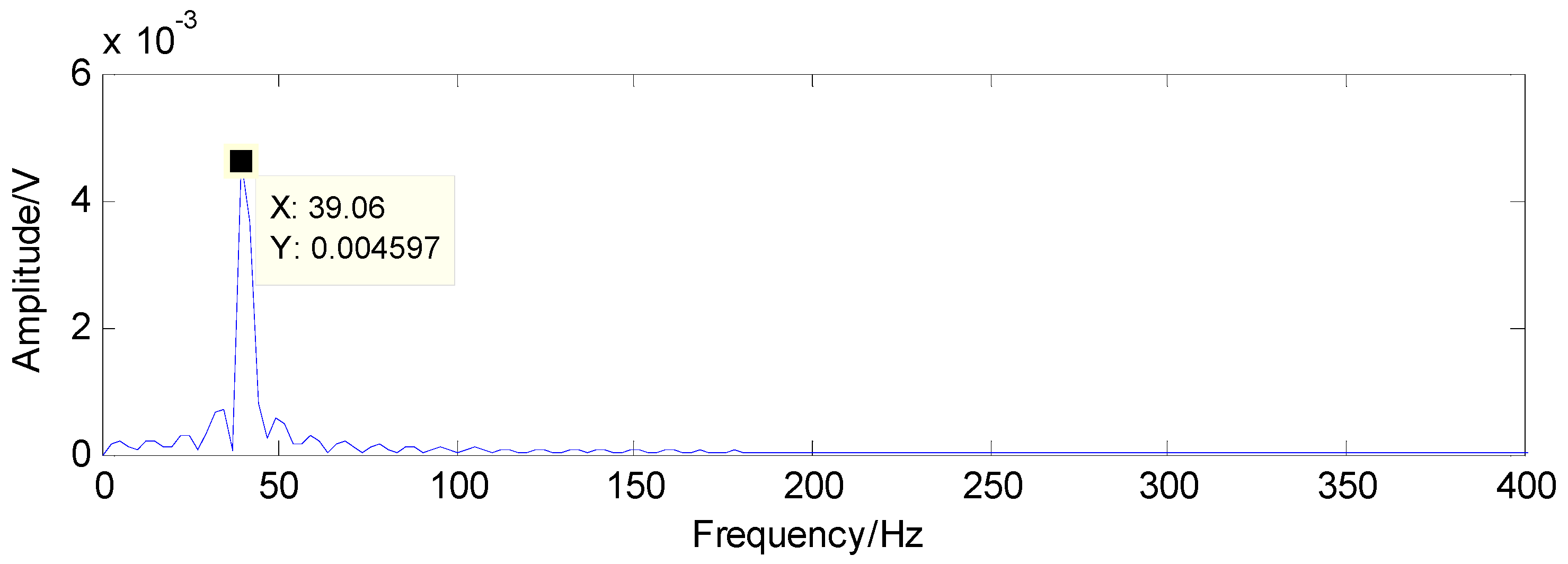
4. Application Cases
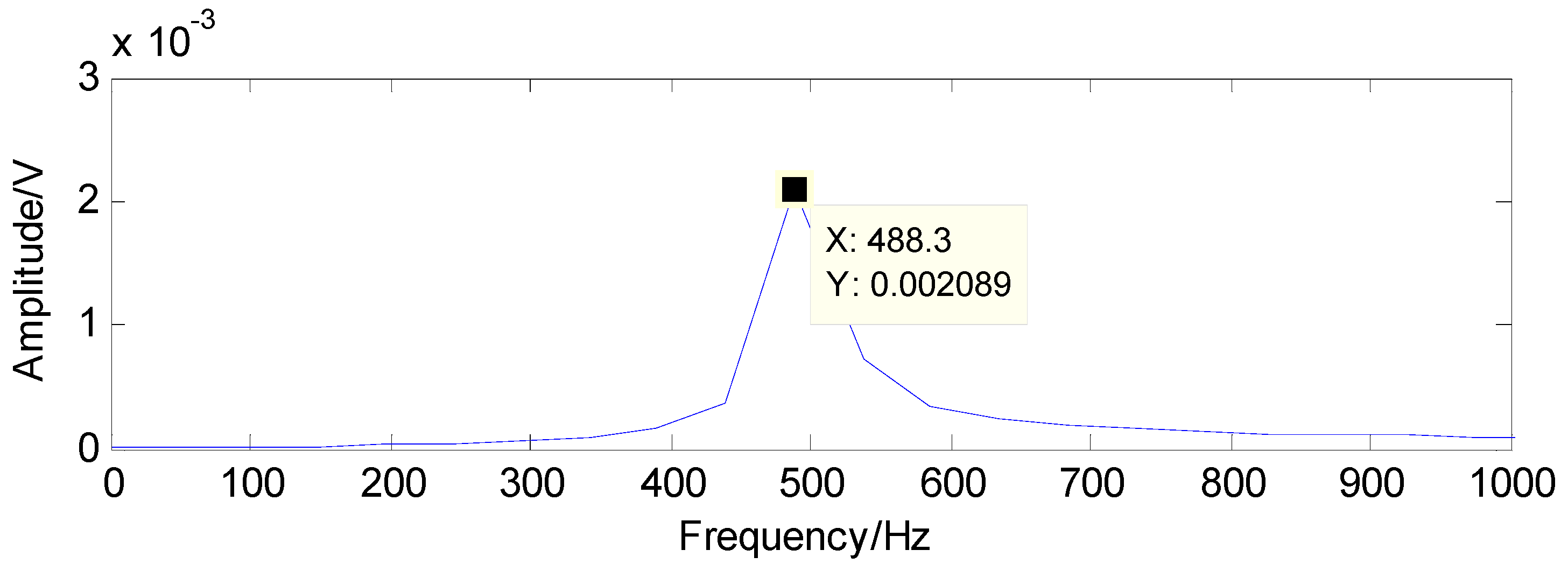
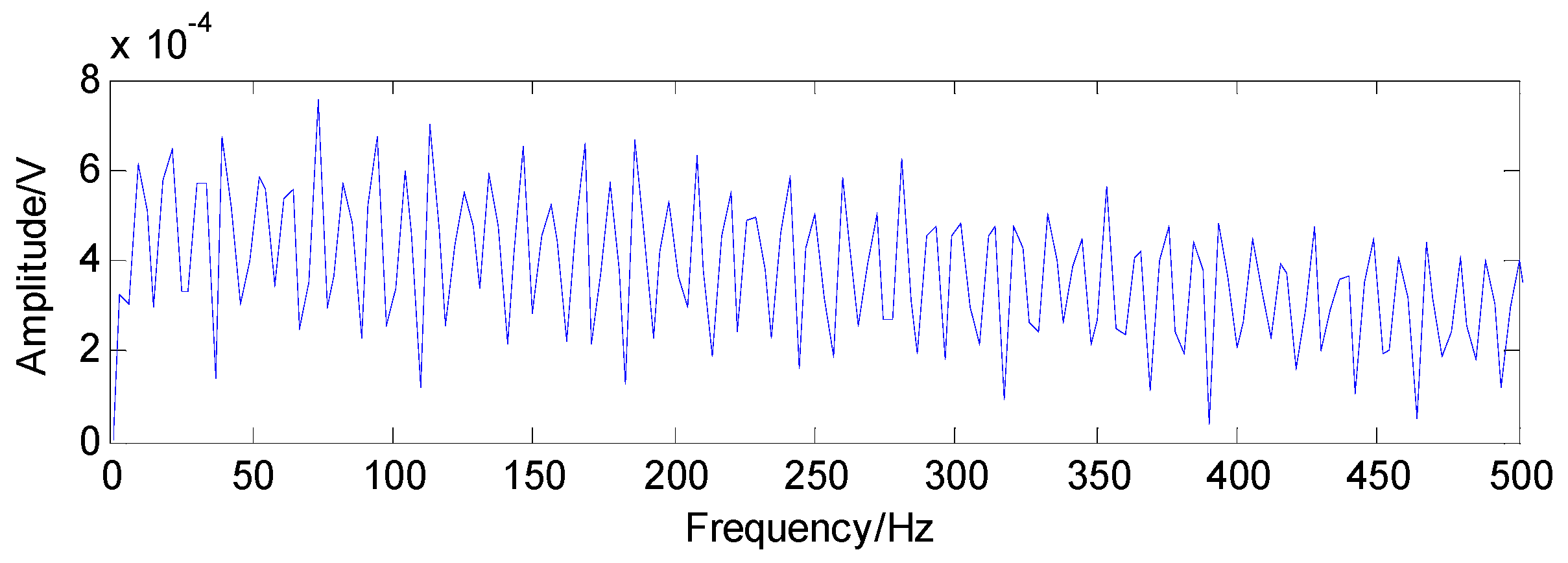
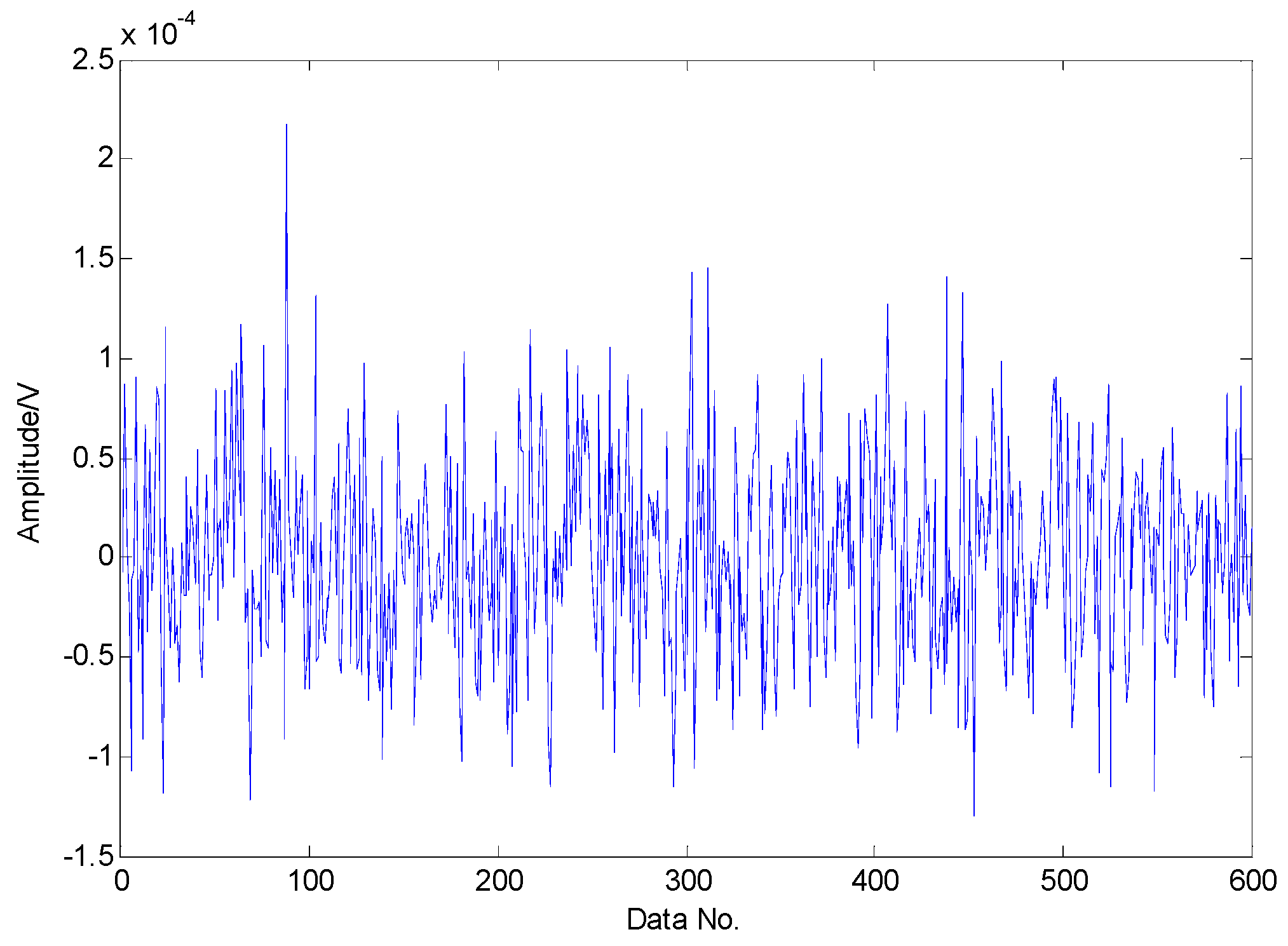
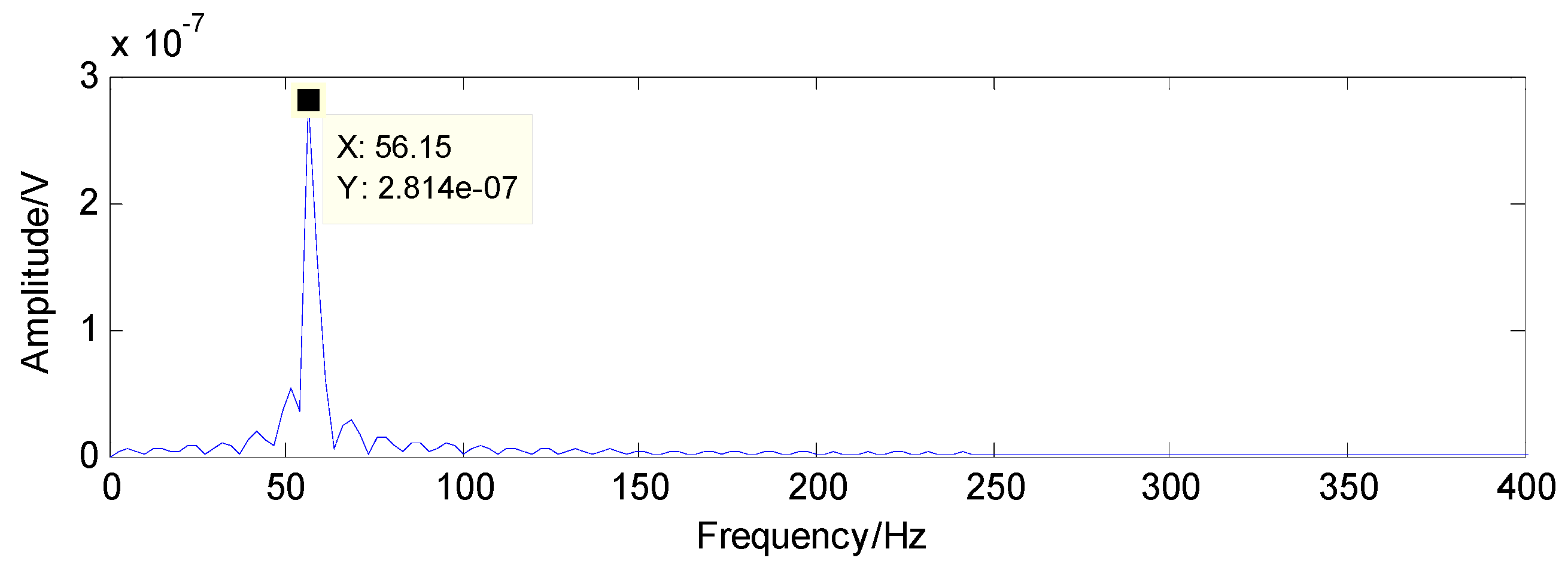
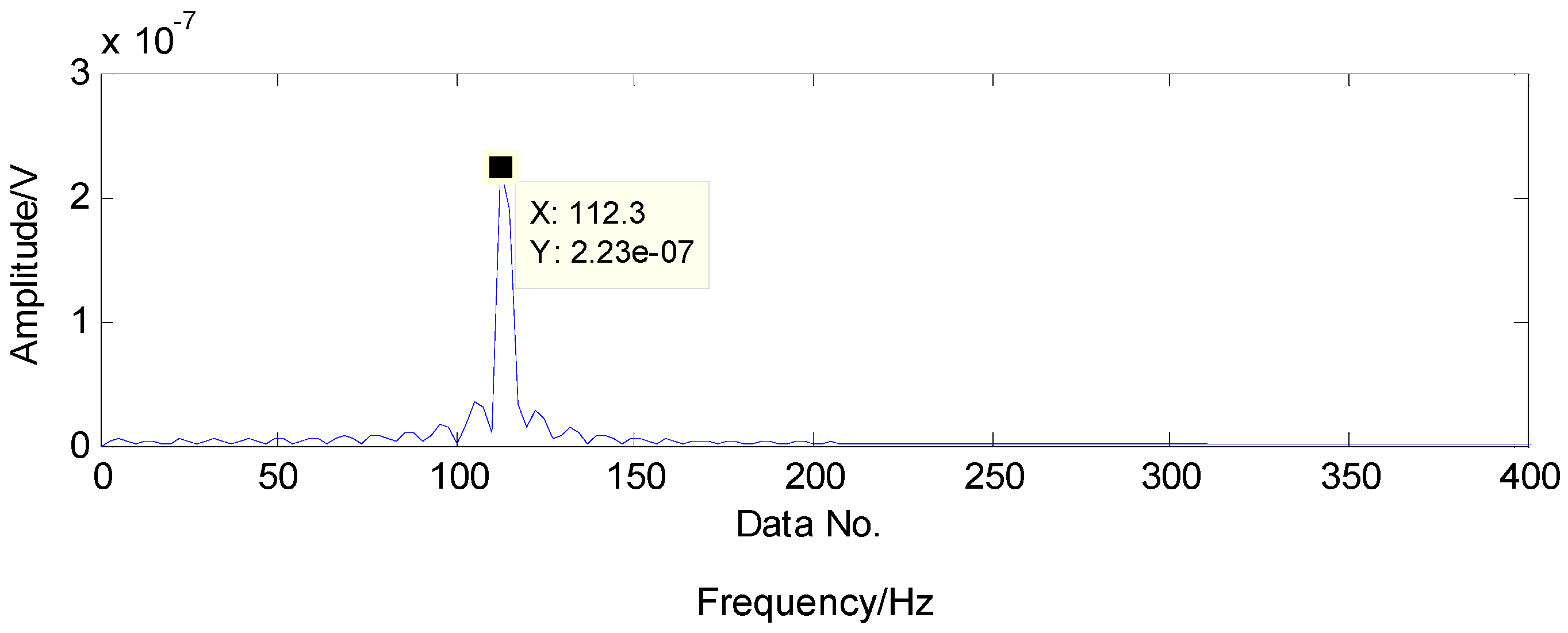
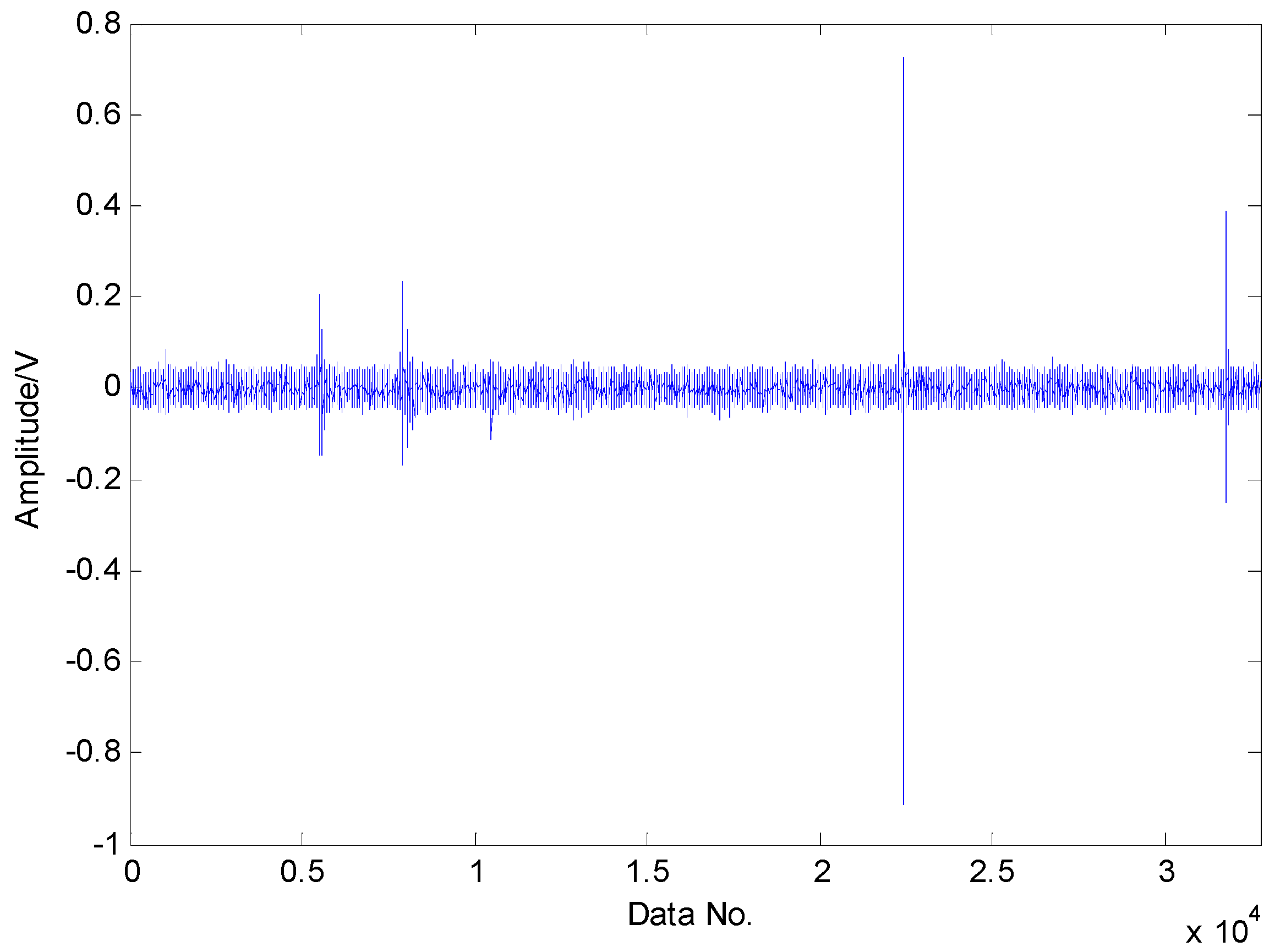
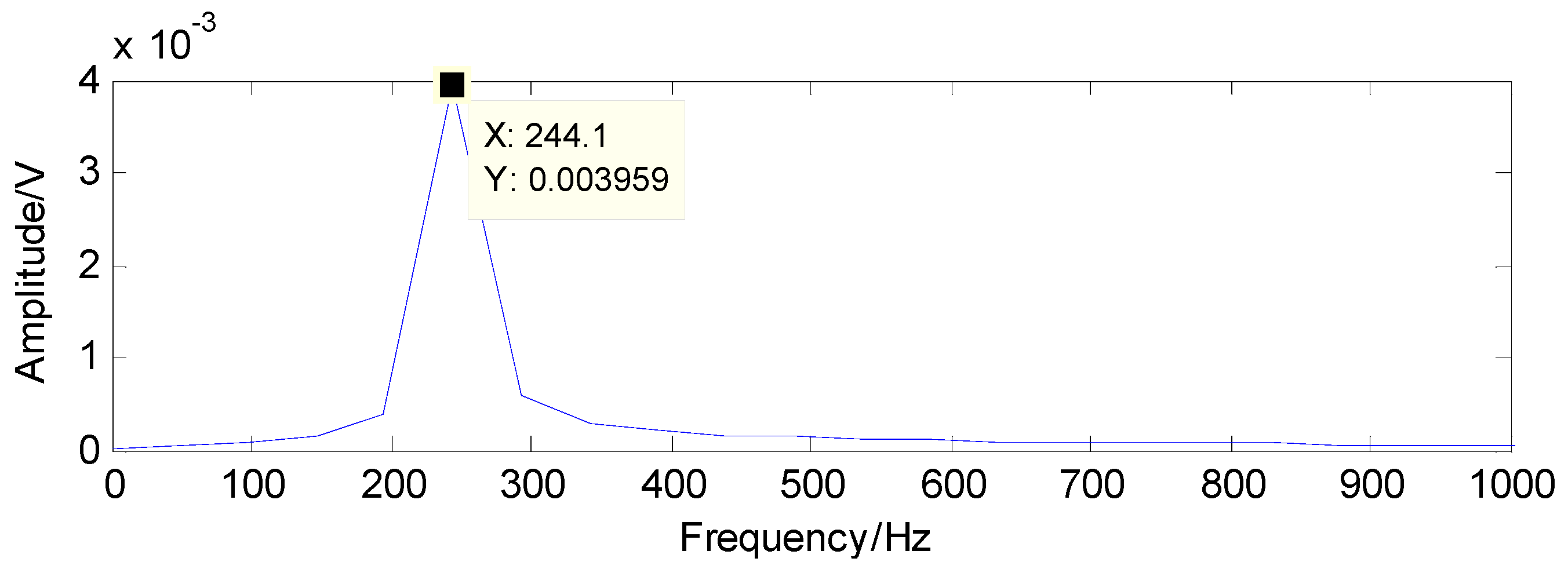
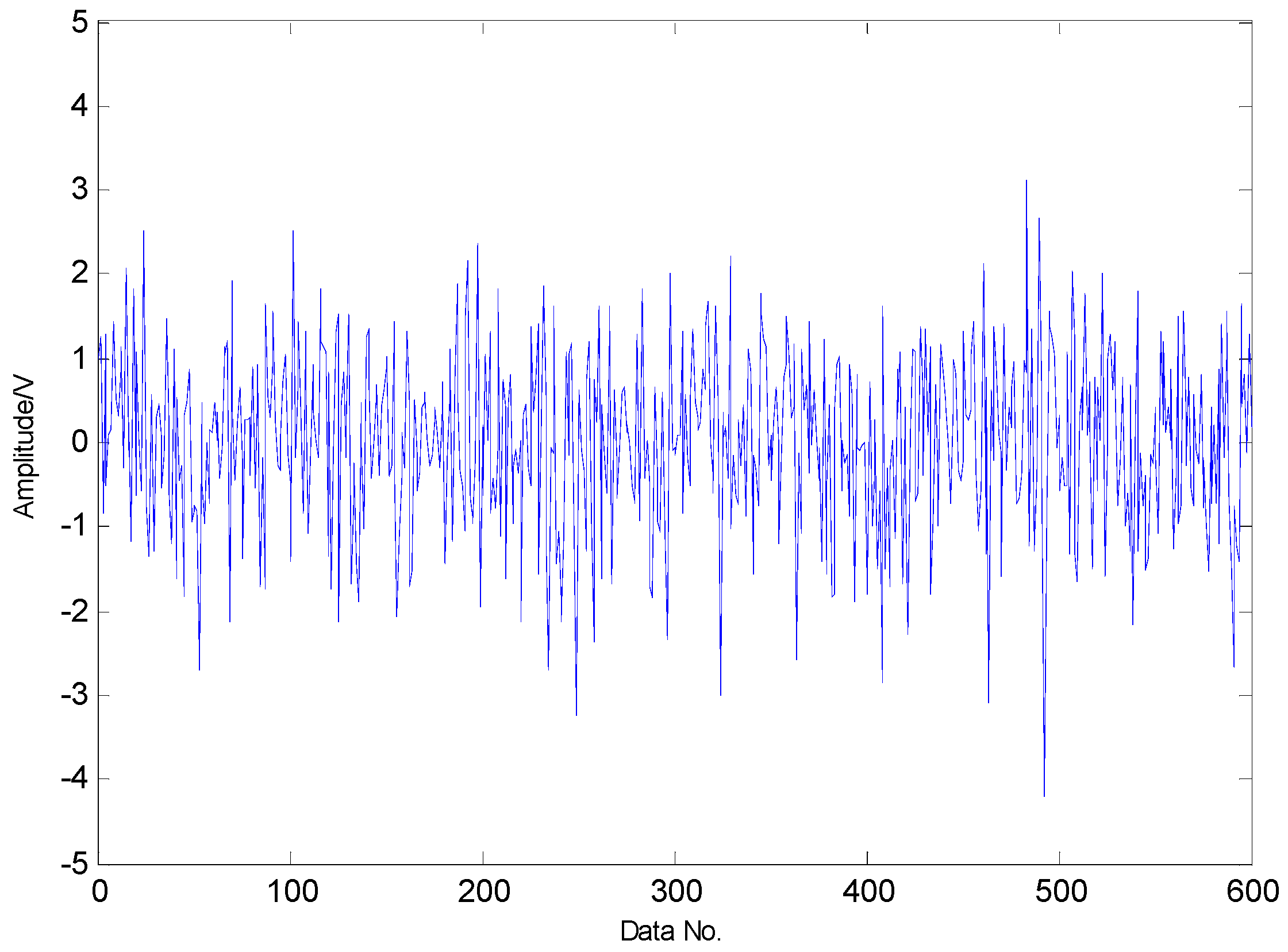
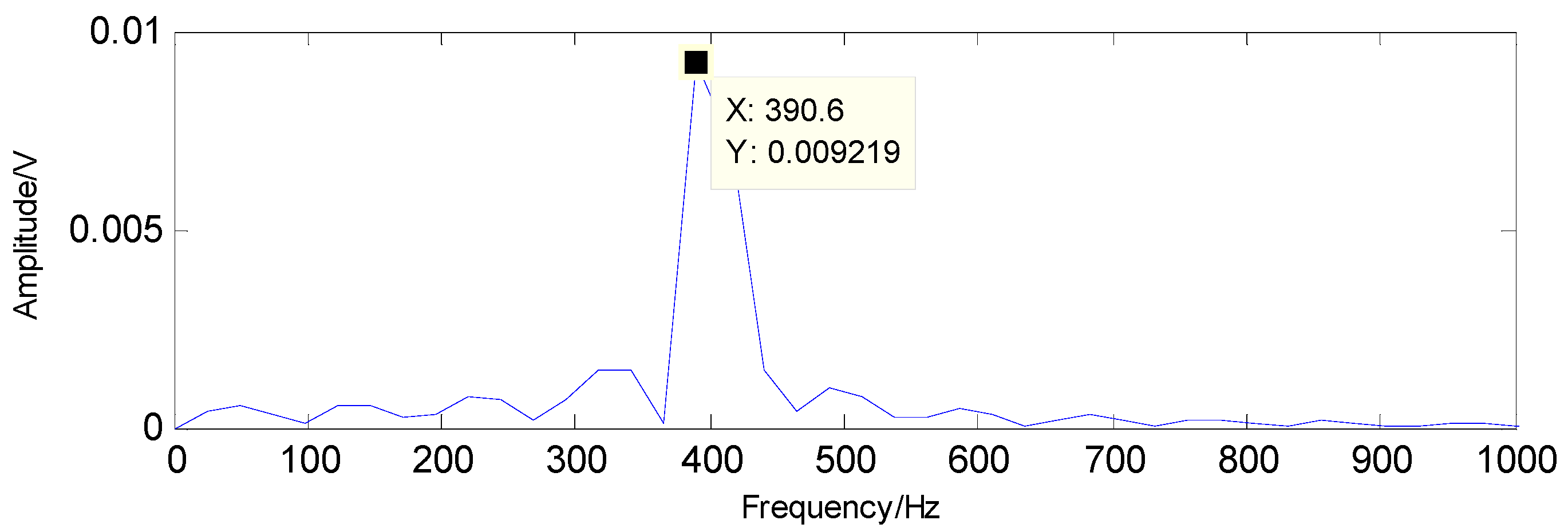
4.1. Detection of the Bearing with an Inner-Race Fault
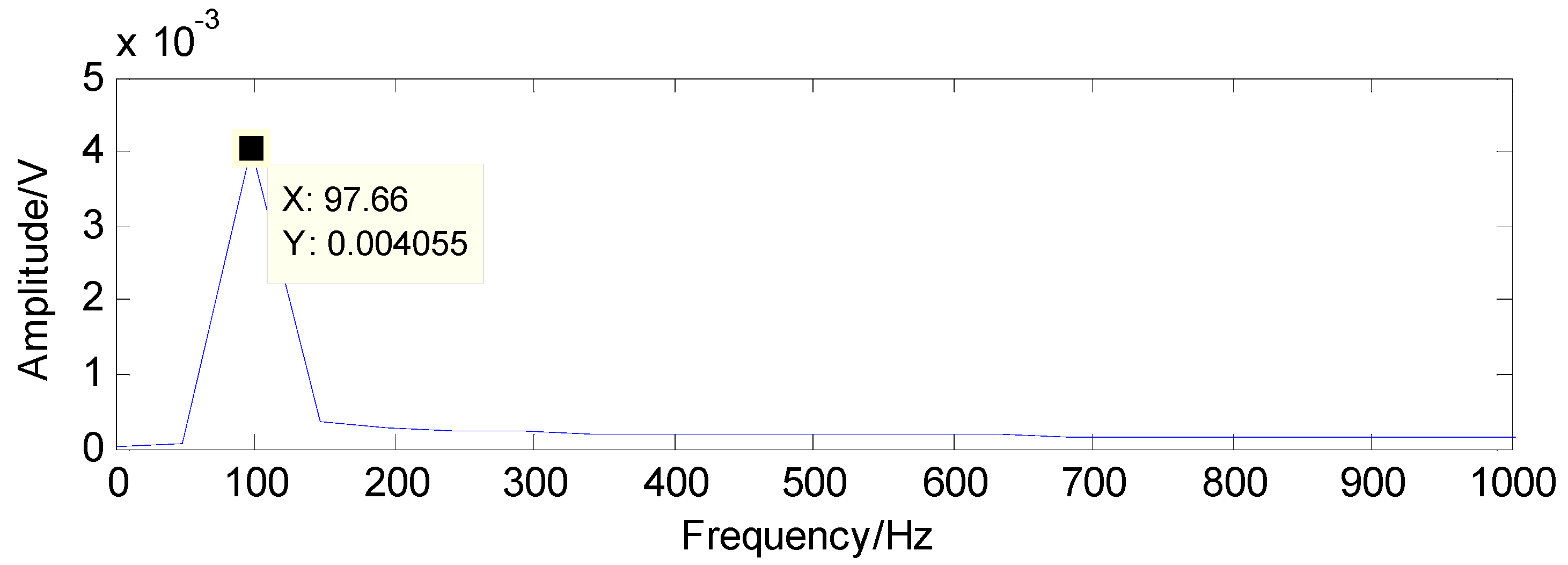
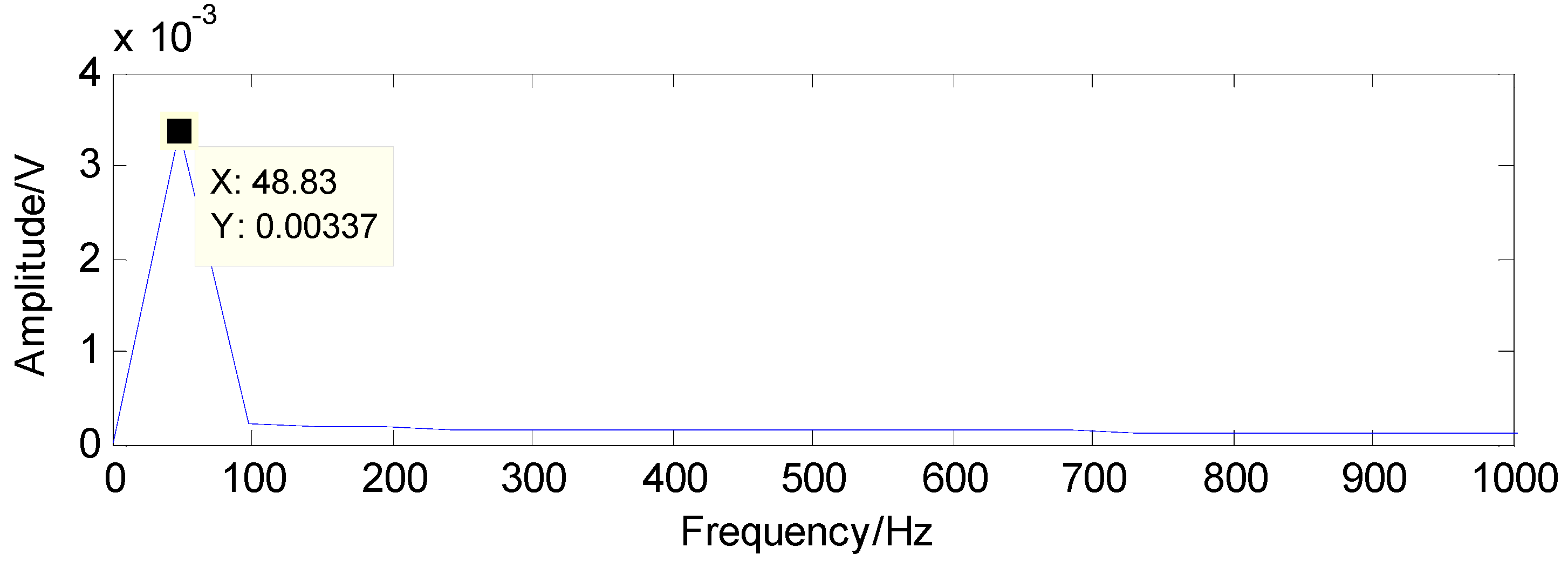
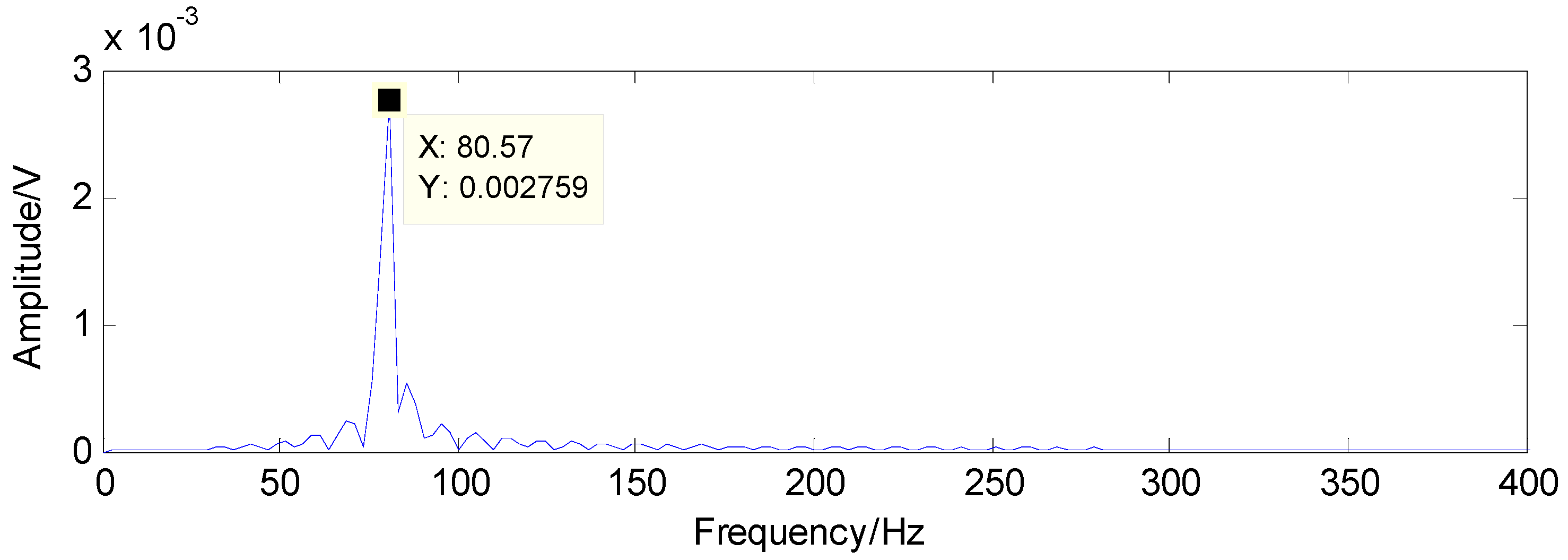
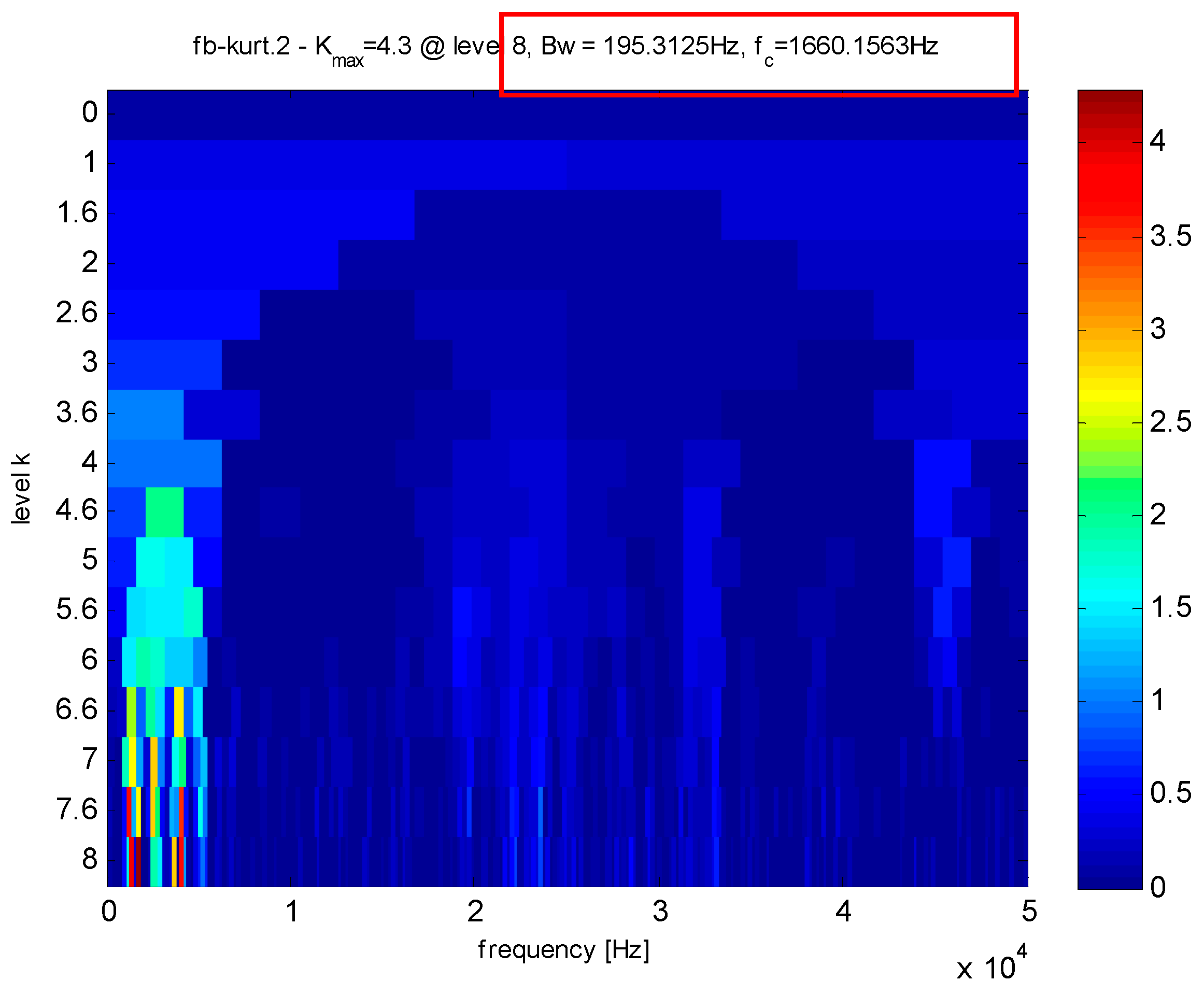
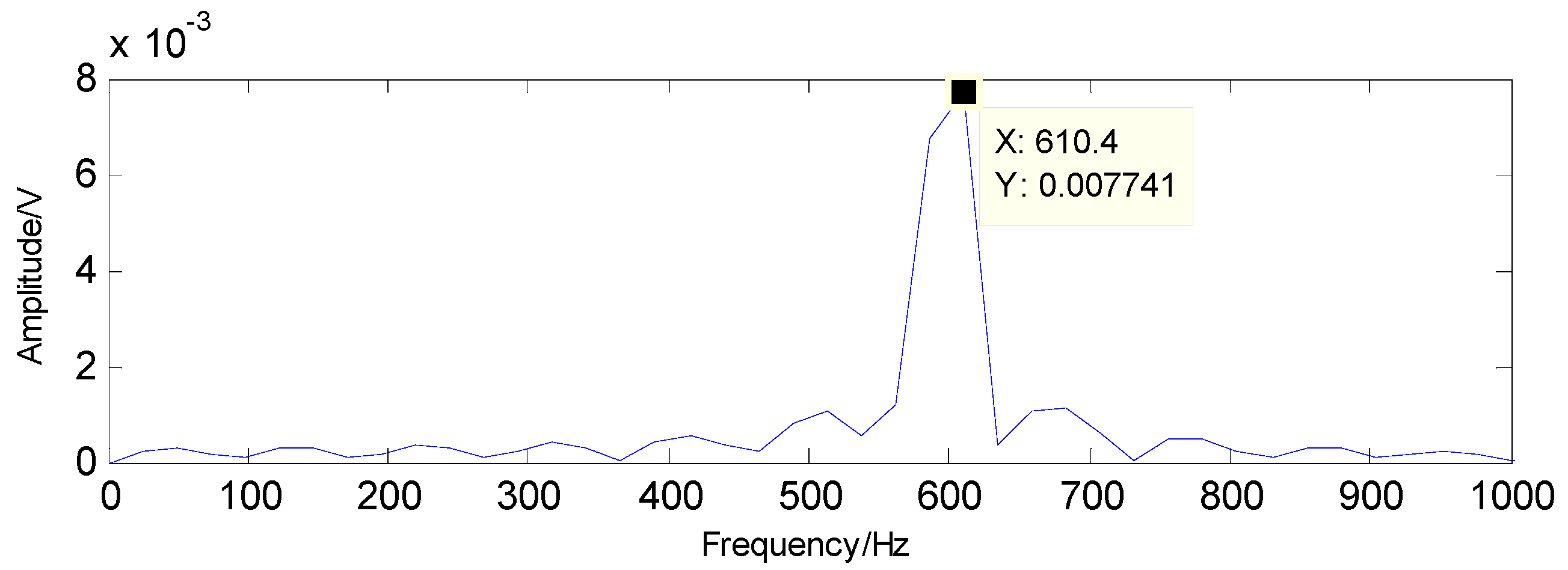
4.2. Detection of the Bearing with an Rolling Element Fault
4.3. Detection of the Healthy Bearing
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Zhou, H.T.; Chen, J.; Dong, G.M.; Wang, H.C.; Yuan, H.D. Bearing fault recognition method based on neighbourhood component analysis and coupled hidden Markov model. Mech. Syst. Signal Process. 2016, 66–67, 568–581. [Google Scholar] [CrossRef]
- Ruiz-Carcel, C.; Jaramillo, V.H.; Mba, D.; Ottewill, J.R.; Cao, Y. Combination of process and vibration data for improved condition monitoring of industrial systems working under variable operating conditions. Mech. Syst. Signal Process. 2016, 66–67, 699–714. [Google Scholar] [CrossRef]
- Saravanan, N.; Cholairajan, S.; Ramachandran, L.L. Vibration-based fault diagnosis of spur bevel gear box using fuzzy technique. Expert Syst. Appl. 2009, 36, 3119–3135. [Google Scholar] [CrossRef]
- Straczkiewicz, M.; Czop, P.; Barszcz, T. The use of a fuzzy logic approach for integration of vibration-based diagnostic features of rolling element bearings. J. Vibroeng. 2015, 17, 1760–1768. [Google Scholar]
- Sugumaran, V.; Ramachandran, K.I. Automatic rule learning using decision tree for fuzzy classifier in fault diagnosis of roller bearing. Mech. Syst. Signal Process. 2007, 21, 2237–2247. [Google Scholar] [CrossRef]
- Zhang, J.H.; Ma, W.P.; Lin, J.W.; Ma, L.; Jia, X.J. Fault diagnosis approach for rotating machinery based on dynamic model and computational intelligence. Measurement 2015, 59, 73–87. [Google Scholar] [CrossRef]
- Li, K.; Chen, P.; Wang, S.M.; Wang, H.Q. Intelligent diagnosis method for bearing using non-dimensional symptom parameters and ant colony optimization. Int. Inf. Inst. (Tokyo) Inf. 2012, 15, 867–877. [Google Scholar]
- Rai, V.K.; Mohanty, A.R. Bearing fault diagnosis using FFT of intrinsic mode functions in Hilbert–Huang transform. Mech. Syst. Signal Process. 2007, 21, 2607–2615. [Google Scholar] [CrossRef]
- Zhang, Y.D.; Chen, S.; Wang, S.H.; Yang, J.F.; Philips, P. Magnetic resonance brain image classification based on weighted-type fractional Fourier transform and nonparallel support vector machine. Int. J. Imaging Syst. Technol. 2015, 25, 317–327. [Google Scholar] [CrossRef]
- Peter, W.T.; Peng, Y.H.; Yam, R. Wavelet analysis and envelope detection for rolling element bearing fault diagnosis—Their effectiveness and flexibilities. J. Vib. Acoust. 2001, 123, 303–310. [Google Scholar]
- Peng, Z.K.; Peter, W.T.; Chu, F.L. A comparison study of improved Hilbert–Huang transform and wavelet transform: Application to fault diagnosis for rolling bearing. Mech. Syst. Signal Process. 2005, 19, 974–988. [Google Scholar] [CrossRef]
- Kumar, R.; Singh, M. Outer race defect width measurement in taper roller bearing using discrete wavelet transform of vibration signal. Measurement 2013, 46, 537–545. [Google Scholar] [CrossRef]
- Zarei, J.; Poshtan, J. Bearing fault detection using wavelet packet transform of induction motor stator current. Tribol. Int. 2007, 40, 763–769. [Google Scholar] [CrossRef]
- Yu, D.J.; Cheng, J.S.; Yang, Y. Application of EMD method and Hilbert spectrum to the fault diagnosis of roller bearings. Mech. Syst. Signal Process. 2005, 19, 259–270. [Google Scholar] [CrossRef]
- Cheng, J.S.; Yu, D.J.; Yang, Y. A fault diagnosis approach for roller bearings based on EMD method and AR model. Mech. Syst. Signal Process. 2006, 20, 350–362. [Google Scholar]
- Yang, Y.; Yu, D.J.; Cheng, J.S. A fault diagnosis approach for roller bearing based on IMF envelope spectrum and SVM. Measurement 2007, 40, 943–950. [Google Scholar] [CrossRef]
- Yan, R.Q.; Gao, R.X. Multi-scale enveloping spectrogram for vibration analysis in bearing defect diagnosis. Tribol. Int. 2009, 42, 293–302. [Google Scholar] [CrossRef]
- Hamid, E.Y.; Kawasaki, Z.I. Wavelet-based data compression of power system disturbances using the minimum description length criterion. IEEE Trans. Power Deliv. 2002, 17, 460–466. [Google Scholar] [CrossRef]
- Istepanian, R.S.H.; Petrosian, A.A. Optimal zonal wavelet-based ECG data compression for a mobile telecardiology system. IEEE Trans. Inf. Technol. B 2000, 4, 200–211. [Google Scholar] [CrossRef]
- Dash, P.K.; Panigrahi, B.K.; Sahoo, D.K.; Panda, G. Power quality disturbance data compression, detection, and classification using integrated spline wavelet and S-transform. IEEE Trans. Power Deliv. 2003, 18, 595–600. [Google Scholar] [CrossRef]
- Meng, J.E.; Chen, W.; Wu, S. High-speed face recognition based on discrete cosine transform and RBF neural networks. IEEE Trans. Neural Netw. 2005, 16, 679–691. [Google Scholar]
- Benzid, R.; Messaoudi, A.; Boussaad, A. Constrained ECG compression algorithm using the block-based discrete cosine transform. Digit. Signal Process. 2008, 18, 56–64. [Google Scholar] [CrossRef]
- Candès, E.J.; Romberg, J.; Tao, T. Robust uncertainty principles: Exact signal reconstruction from highly incomplete frequency information. IEEE Trans. Inform. Theory 2006, 52, 489–509. [Google Scholar] [CrossRef]
- Chan, W.L.; Moravec, M.L.; Baraniuk, R.G.; Mittleman, D.M. Terahertz imaging with compressed sensing and phase retrieval. Opt. Lett. 2008, 33, 974–976. [Google Scholar] [CrossRef] [PubMed]
- Wakin, M.B.; Laska, J.N.; Duarte, M.F.; Baron, D.; Sarvotham, S.; Takhar, D.; Kelly, K.F.; Baraniuk, R.G. An architecture for compressive imaging. In Proceedings of the 2006 IEEE International Conference on Image Processing, Atlanta, GA, USA, 8–11 October 2006.
- Kim, I.; Vu, N.L. Parallel compressed sensing method to accelerate MRI. In Proceedings of the 2012 12th International Conference on Control, Automation and Systems (ICCAS), Jeju Island, Korea, 17–21 October 2012.
- Ma, J.W. Single-pixel remote sensing. IEEE Geosci. Remote Sens. Lett. 2009, 6, 199–203. [Google Scholar]
- Selesnick, I.W. Wavelet transform with tunable Q-factor. IEEE Trans. Signal Process. 2011, 59, 3560–3575. [Google Scholar] [CrossRef]
- Wang, H.C.; Chen, J.; Dong, G.M. Feature extraction of rolling bearing’s early weak fault based on EEMD and tunable Q-factor wavelet transform. Mech. Syst. Signal Process. 2014, 48, 103–119. [Google Scholar] [CrossRef]
- Chaibi, S.; Lajnef, T.; Sakka, Z.; Samet, M.; Kachouri, A. A reliable approach to distinguish between transient with and without HFOs using TQWT and MCA. J. Neurosci. Meth. 2014, 232, 36–46. [Google Scholar] [CrossRef] [PubMed]
- He, W.P.; Zi, Y.Y.; Chen, B.Q.; Wu, F.; He, Z.J. Automatic fault feature extraction of mechanical anomaly on induction motor bearing using ensemble super-wavelet transform. Mech. Syst. Signal Process. 2015, 54, 457–480. [Google Scholar] [CrossRef]
- He, W.P.; Zi, Y.Y.; Chen, B.Q.; Wang, S.; He, Z.J. Tunable Q-factor wavelet transform denoising with neighboring coefficients and its application to rotating machinery fault diagnosis. Sci. China Technol. Sci. 2013, 56, 1956–1965. [Google Scholar] [CrossRef]
- Luo, J.S.; Yu, D.J.; Liang, M. A kurtosis-guided adaptive demodulation technique for bearing fault detection based on tunable-Q wavelet transform. Meas. Sci. Technol. 2013, 24, 055009. [Google Scholar] [CrossRef]
- Antoni, J.; Randall, R.B. The peactral kurtosis: Application to the vibratory surveillance and diagnostics of rotating machines. Mech. Syst. Signal Process. 2006, 20, 308–331. [Google Scholar] [CrossRef]
- Stankovic, L.; Stankovic, S.; Amin, M. Missing samples analysis in signals for applications to L-estimation and compressive sensing. Signal Process. 2014, 94, 401–408. [Google Scholar] [CrossRef]
- Gishkori, S.; Leus, G.; Lottici, V. Compressive sampling based differential detection for UWB impulse radio signals. Phys. Commun. 2012, 5, 185–195. [Google Scholar] [CrossRef]
- Wang, H.Q.; Ke, Y.L.; Luo, G.G.; Tang, G. Compressed sensing of roller bearing fault based on multiple down-sampling strategy. Meas. Sci. Technol. 2015, 27, 025009. [Google Scholar] [CrossRef]
- Tang, G.; Hou, W.; Wang, H.Q.; Luo, G.G.; Ma, J.W. Compressive sensing of roller bearing fault via harmonic detection from under-samples vibration signals. Sensors 2015, 15, 25648–25662. [Google Scholar] [CrossRef] [PubMed]
- Tang, G.; Yang, Q.; Wang, H.Q.; Luo, G.G.; Ma, J.W. Sparse classification of rotating machinery faults based on compressive sensing strategy. Mechatronics 2015, 31, 60–67. [Google Scholar] [CrossRef]
- Do, T.T.; Lu, G.; Nguyen, N.; Tran, T.D. Sparsity adaptive matching pursuit algorithm for practical compressed sensing. In Proceedings of the 2008 42nd Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 26–29 October 2008.
- Baraniuk, R.G. Compressive sensing. IEEE Signal Proc. Mag. 2007, 24, 1–9. [Google Scholar] [CrossRef]
- Candes, E.J.; Tao, T. Near-optimal signal recovery from random projections: Universal encoding strategies? IEEE Trans. Inform. Theory 2006, 52, 520–544. [Google Scholar] [CrossRef]
- Zhang, Y.D.; Dong, Z.C.; Phillips, P.; Wang, S.H.; Ji, G.L.; Yang, J.Q. Exponential wavelet iterative shrinkage thresholding algorithm for compressed sensing magnetic resonance imaging. Inform. Sci. 2015, 322, 115–132. [Google Scholar] [CrossRef]
- Zhang, Y.D.; Peterson, B.S.; Ji, G.L.; Dong, Z.C. Energy preserved sampling for compressed sensing MRI. Comput. Math. Method Med. 2014, 2014, 546814. [Google Scholar] [CrossRef] [PubMed]
- Fowler, J.E.; Du, Q. Anomaly detection and reconstruction from random projections. IEEE Trans. Image Process. 2012, 21, 184–195. [Google Scholar] [CrossRef] [PubMed]
- Li, M.J.; Wang, H.Q.; Tang, G.; Yuan, H.F.; Yang, Y. An Improved Method Based on CEEMD for Fault Diagnosis of Rolling Bearing. Adv. Mech. Eng. 2014, 6, 676205. [Google Scholar] [CrossRef]
- Wang, H.Q.; Li, R.T.; Tang, G.; Yuan, H.F.; Zhao, Q.L.; Cao, X. A compound fault diagnosis for rolling bearings method based on blind source separation and ensemble empirical mode decomposition. PLoS ONE 2014, 9, e109166. [Google Scholar] [CrossRef] [PubMed]


































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fault Location | Inner-Race | Rolling Element |
|---|---|---|
| Fault characteristic frequency (Hz) | 56.09 | 39.33 |
| Twice value (Hz) | 112.18 | 78.66 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, H.; Ke, Y.; Song, L.; Tang, G.; Chen, P. A Sparsity-Promoted Decomposition for Compressed Fault Diagnosis of Roller Bearings. Sensors 2016, 16, 1524. https://doi.org/10.3390/s16091524
Wang H, Ke Y, Song L, Tang G, Chen P. A Sparsity-Promoted Decomposition for Compressed Fault Diagnosis of Roller Bearings. Sensors. 2016; 16(9):1524. https://doi.org/10.3390/s16091524
Chicago/Turabian StyleWang, Huaqing, Yanliang Ke, Liuyang Song, Gang Tang, and Peng Chen. 2016. "A Sparsity-Promoted Decomposition for Compressed Fault Diagnosis of Roller Bearings" Sensors 16, no. 9: 1524. https://doi.org/10.3390/s16091524
APA StyleWang, H., Ke, Y., Song, L., Tang, G., & Chen, P. (2016). A Sparsity-Promoted Decomposition for Compressed Fault Diagnosis of Roller Bearings. Sensors, 16(9), 1524. https://doi.org/10.3390/s16091524