
A Social Potential Fields Approach for Self-Deployment and Self-Healing in Hierarchical Mobile Wireless Sensor Networks

 , ,
, ,
Abstract
:1. Introduction
2. A Behavior-Based Self-Deployment and -Repair Algorithm
2.1. An Implementation of SPF for MWSN
- Repulsion force(s) repels the robot from other robots or physical obstacles in its vicinity to prevent collisions. In our implementation, the coverage area boundary is modeled as a virtual obstacle, so that it also repels nodes to prevent them from leaving the area.
- Repulsion force(s) moves robots away from each other to expand the network. These forces can be calculated using RSS.
- An attraction force (clustering force) increases with to avoid the loss of communication.
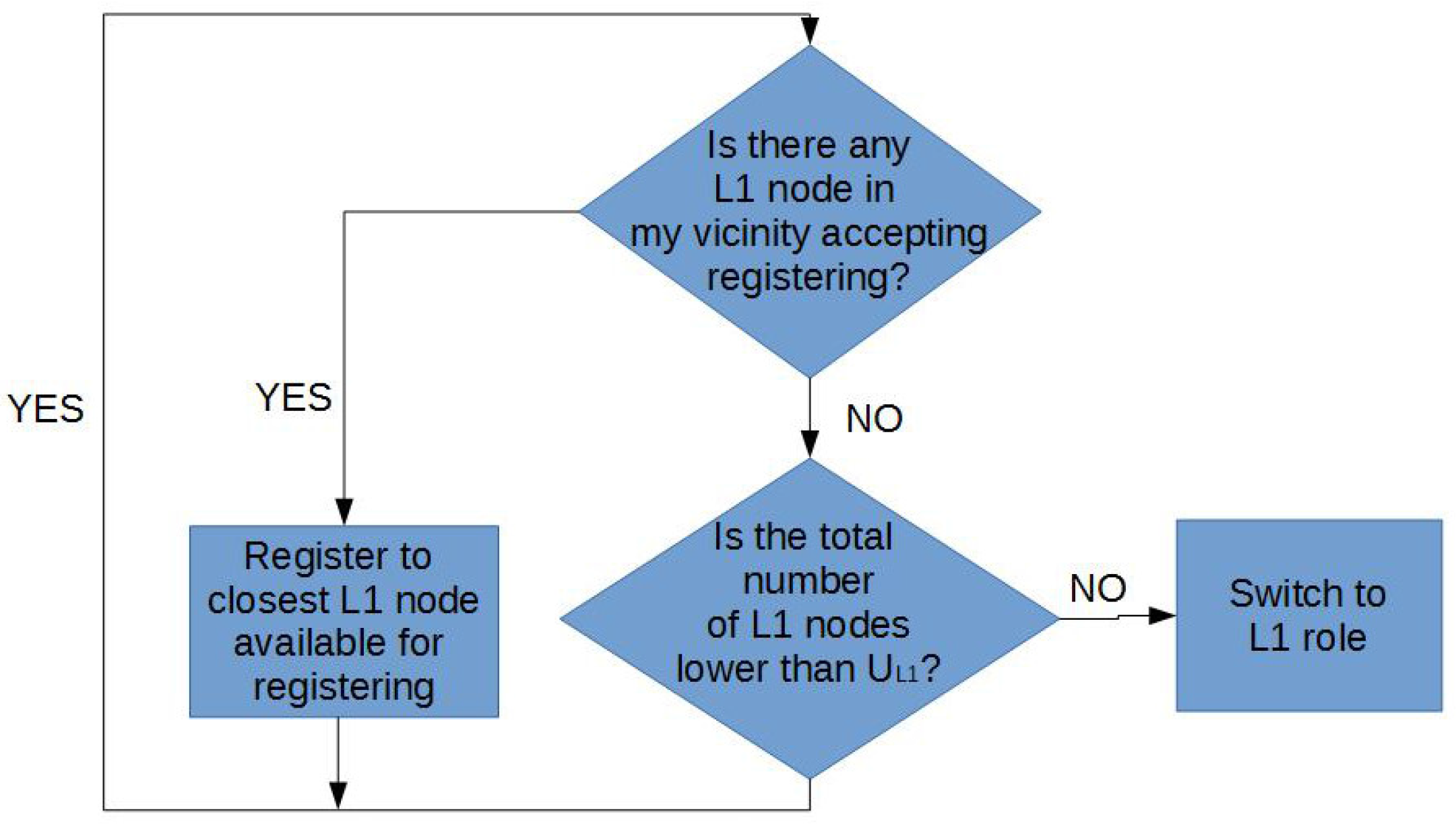
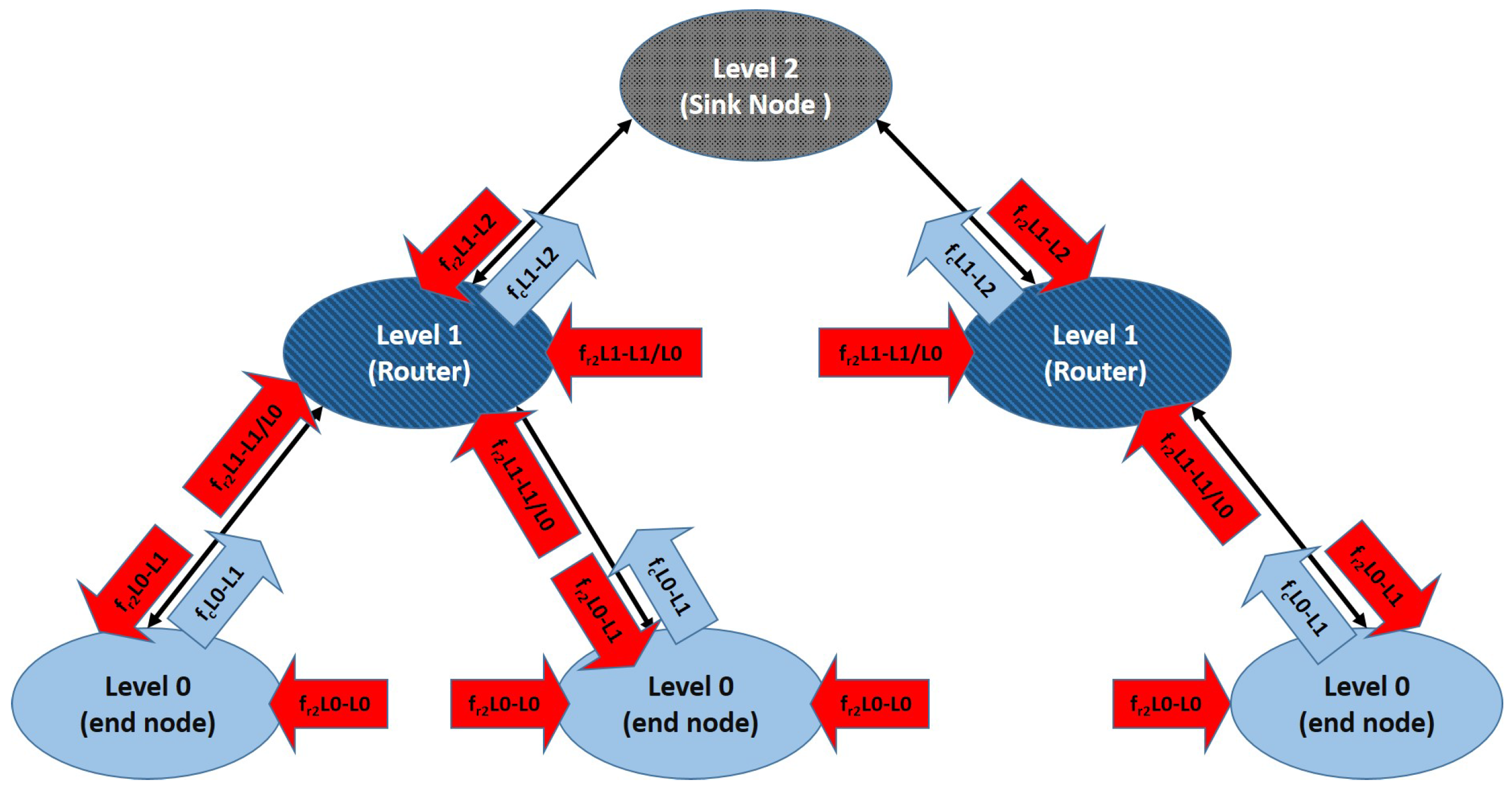
2.2. Role Definition for Different Routing Mechanisms
- is the same for non-hierarchical and hierarchical topologies, i.e., in both cases, nodes need to avoid obstacles and remain in the coverage area.
- Repulsion force(s) depends on node roles. In hierarchical routing, L0 nodes are less repelled from L1 nodes than from other L0 nodes or the sink node. Similarly, L1 nodes are less repelled from the sink than from other nodes.
- The clustering force : in non-hierarchical networks, nodes are attracted to the sink node: in hierarchical networks, L0 nodes are attracted to L1 nodes, and L1 nodes are attracted to the sink node.
2.3. Algorithm Implementation
- Repulsion forces in our tests are fixed so that robots are not affected by objects farther than 1 m. Obstacles may include static objects and other robots and also the borderline of the area to be covered by the MWSN.
- Repulsion forces are adjusted to keep at least 2 m between any two robots.
- Clustering forces are adjusted to start affecting robots when they are at least 1.5 m away.
3. Methodology
3.1. Evaluation Parameters
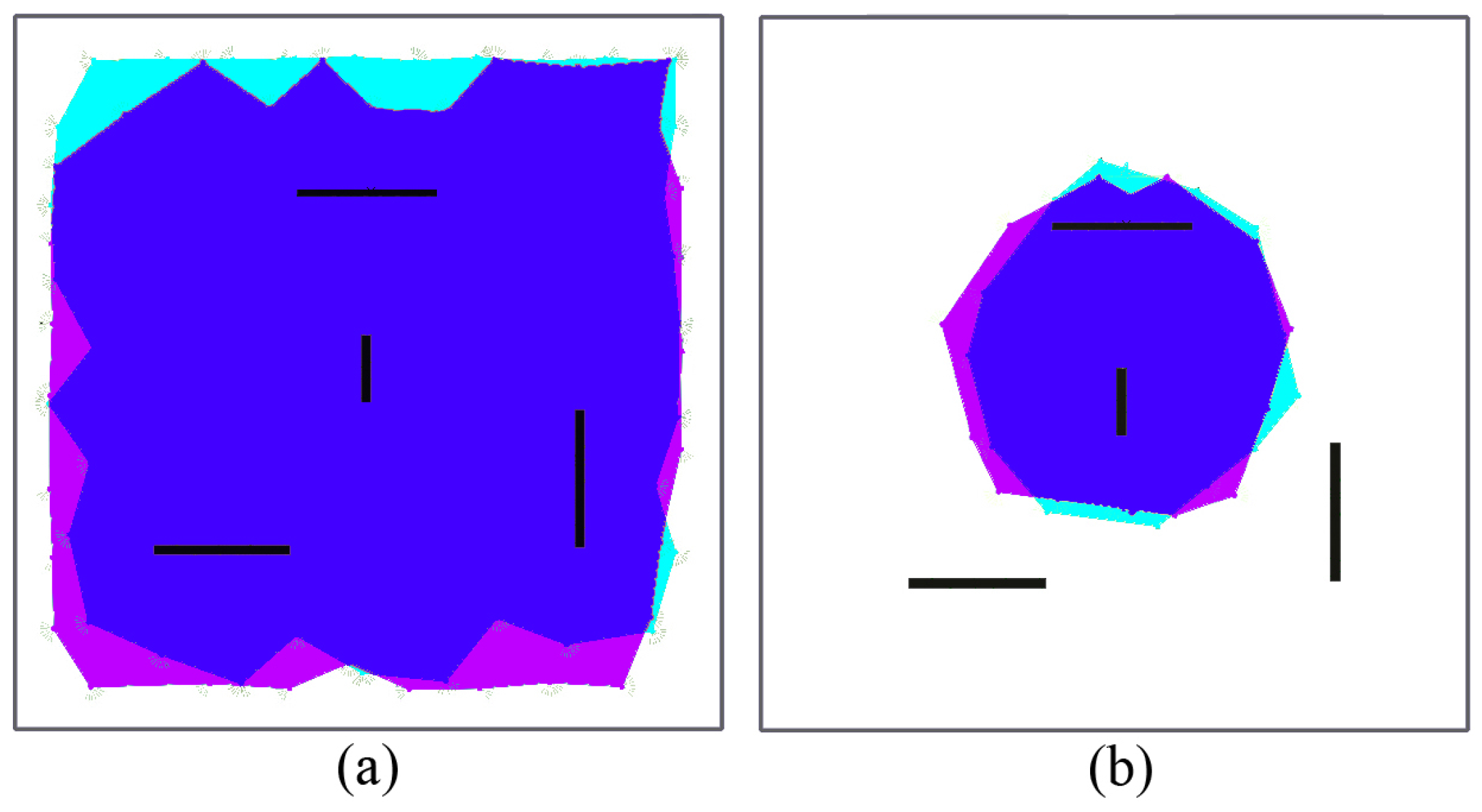
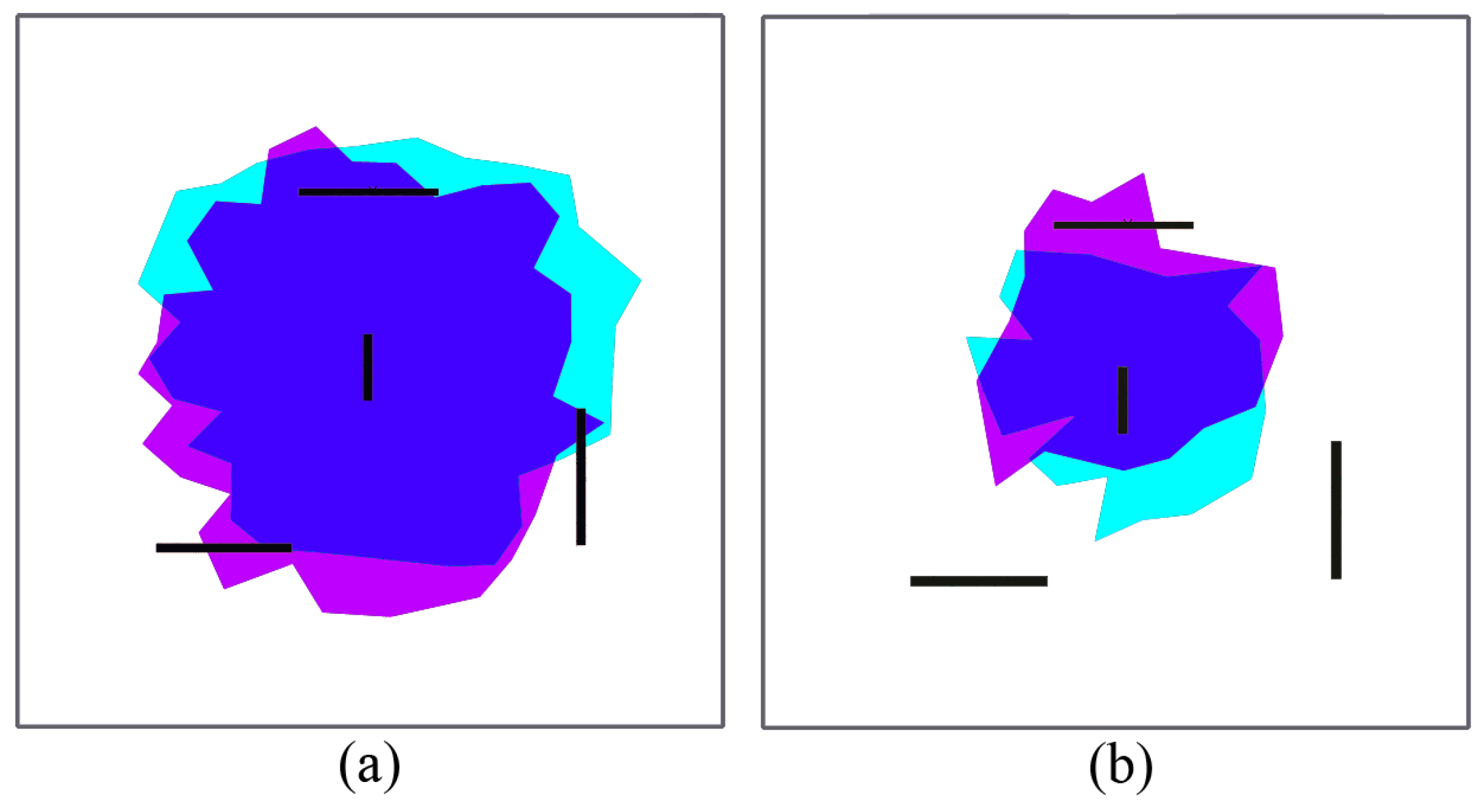
- Blanket coverage: percentage of the deployment region A covered by at least one sensor. Coverage C is the ratio between the union ∪ of all and A, being the round area covered by node i. For N sensors:If we assume that cell i has a probability of detecting an event on the cell, we can model Equation (1) with a probabilistic grid of M cells [40]. Any event at cell i can be detected by several nodes, i.e., node j may detect an event at cell i with a probability . Hence, can be calculated from the probability of an event going undetected at cell i ():
- Energetic efficiency: The cost of deployment and self-healing depend on distance d traveled by a node to its current location; and time t to reach its current location [41].
- Energy cost when nodes are not moving depends on the uniformity U of the deployment topology. In a network of N nodes:being the number of neighbors of node i, being the distance between nodes i and j and being the average distance between node i and its neighbors.
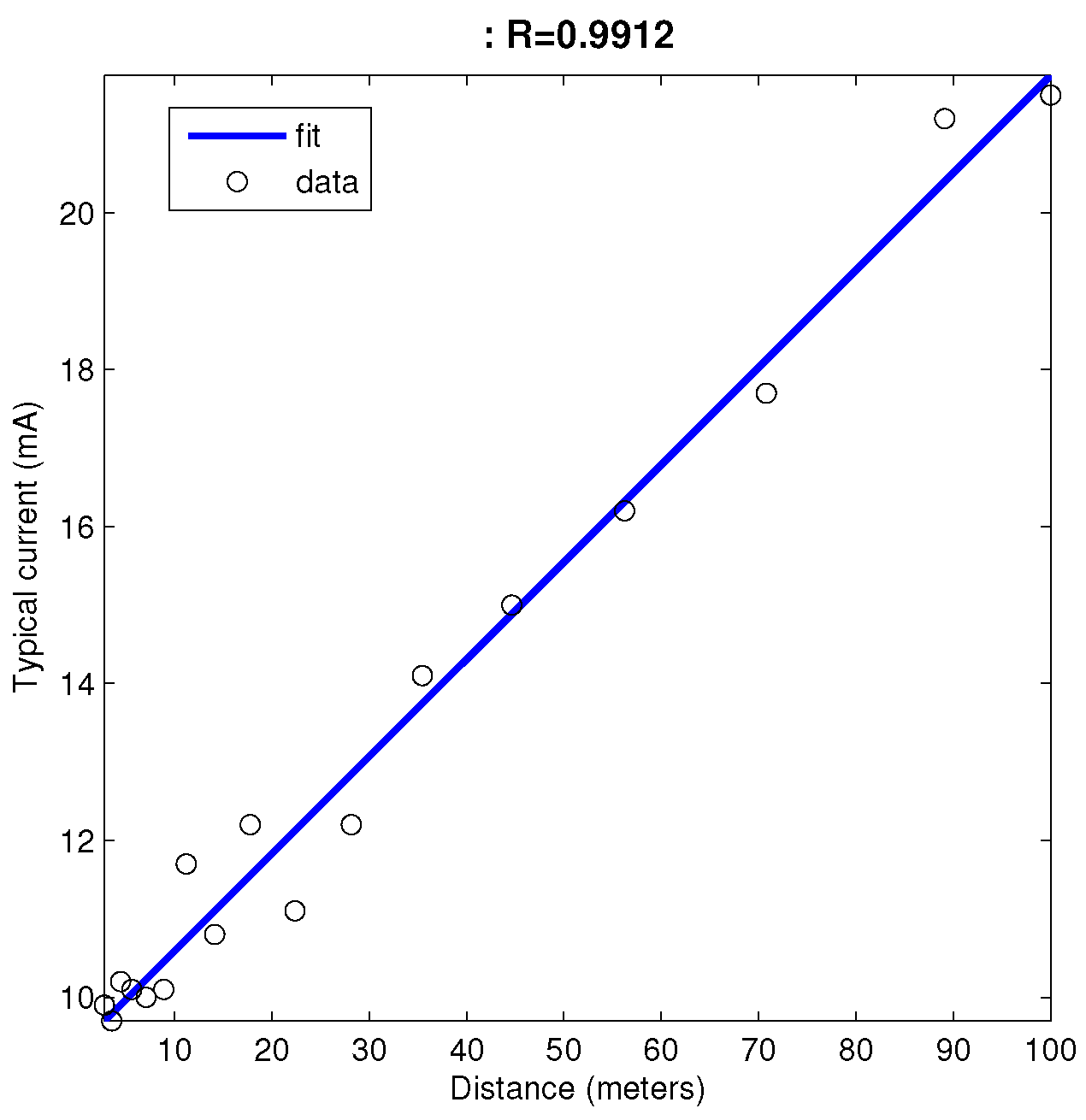
- The average power that nodes require to send a message to the network :being the average power that node i needs to send a message to the network. has an impact on the network lifetime, and it can be obtained as:being the power needed to send a message from node i to j. This power depends on the physical features of the RF chipset the network is using.If messages need to hop through k nodes, it is necessary to add the involved transmission power between each of the two nodes:
- Networks are unbalanced when some nodes consistently transmit more packets than others. In the non-balanced situation, the life time of loaded nodes is significantly shorter that the rest. Failure in some critical nodes may lead to disconnection of large areas of the network. Unbalance can be analyzed by the evaluation deviation in the number of routed packets per sent message in the network (). If is high, some nodes are routing far more traffic than the rest.
3.2. Work Environment
3.3. Tests Description
- Geographic routing without obstacles
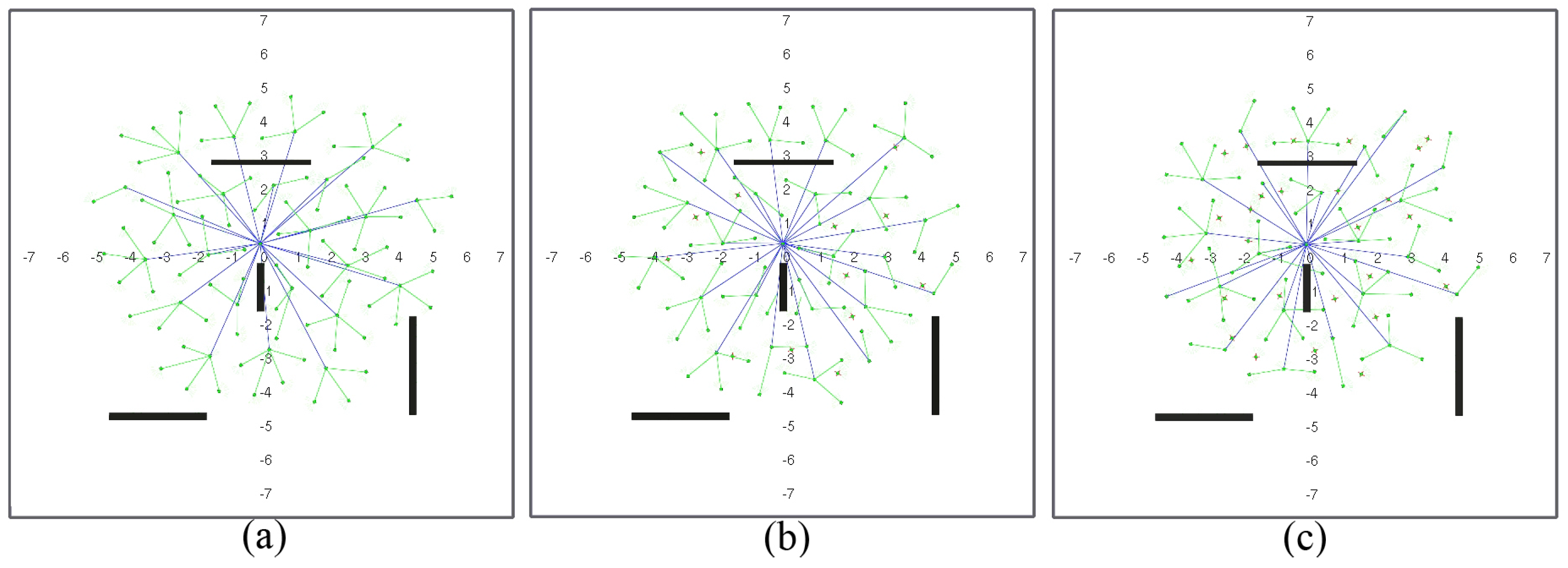
- Geographic routing with obstacles
- Hierarchical routing without obstacles
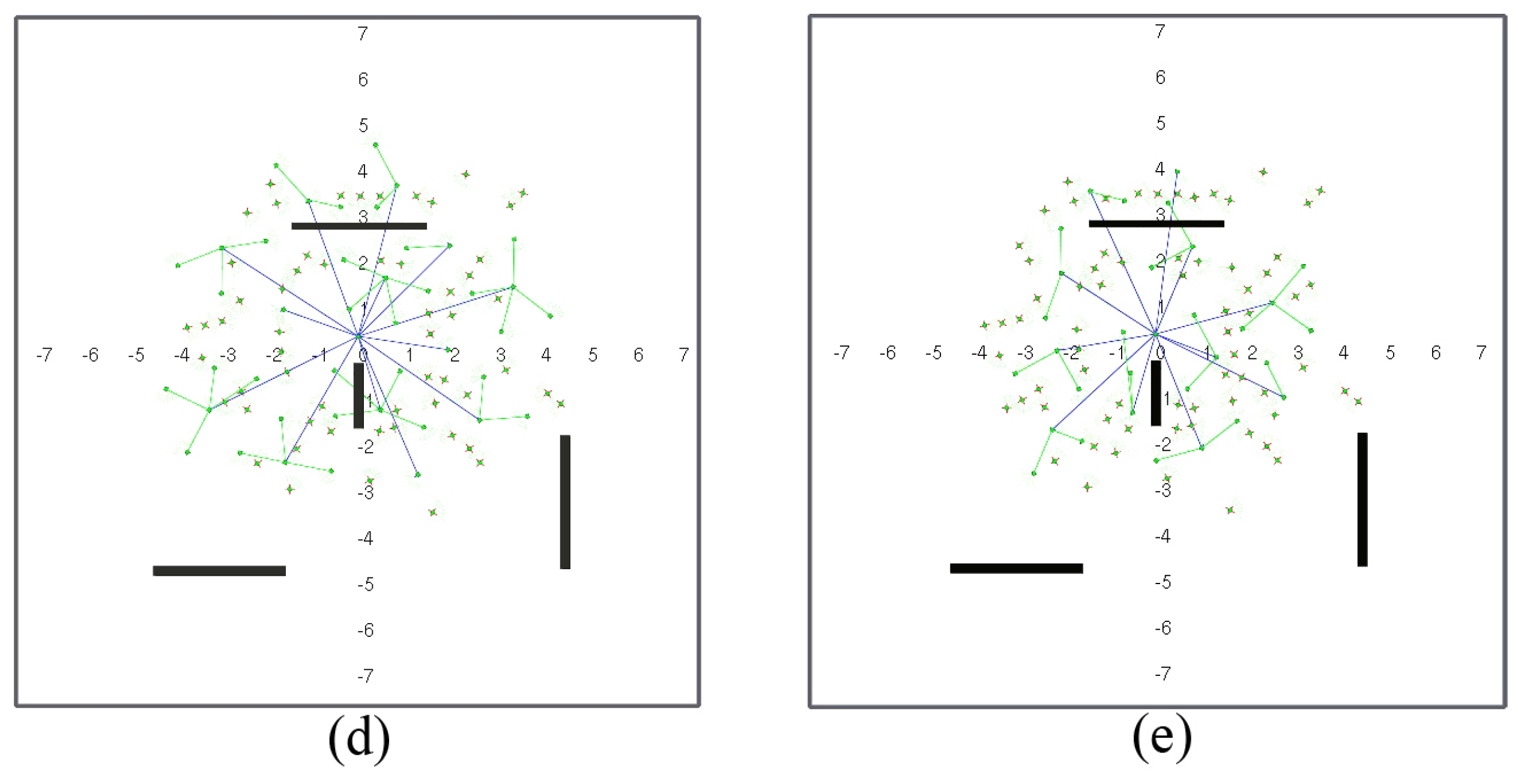
- Hierarchical routing with obstacles
- Let nodes move until balance, i.e., nodes stop moving (see Section 2).
- Obtain all relevant quality parameters (see Section 3.1).
- Determine which nodes would fail first (depending on routed traffic), and move time forwards in the simulation until the most loaded nodes run out of battery (typically, nodes do not fail continuously, but in small groups, depending on how many packets they were routing/rerouting). At this point, forces are not balanced anymore, and remaining living nodes start to move again.
- Go back to Step 1 until the number of living nodes is lower than 70% of the original number of nodes.
4. Experiments and Results
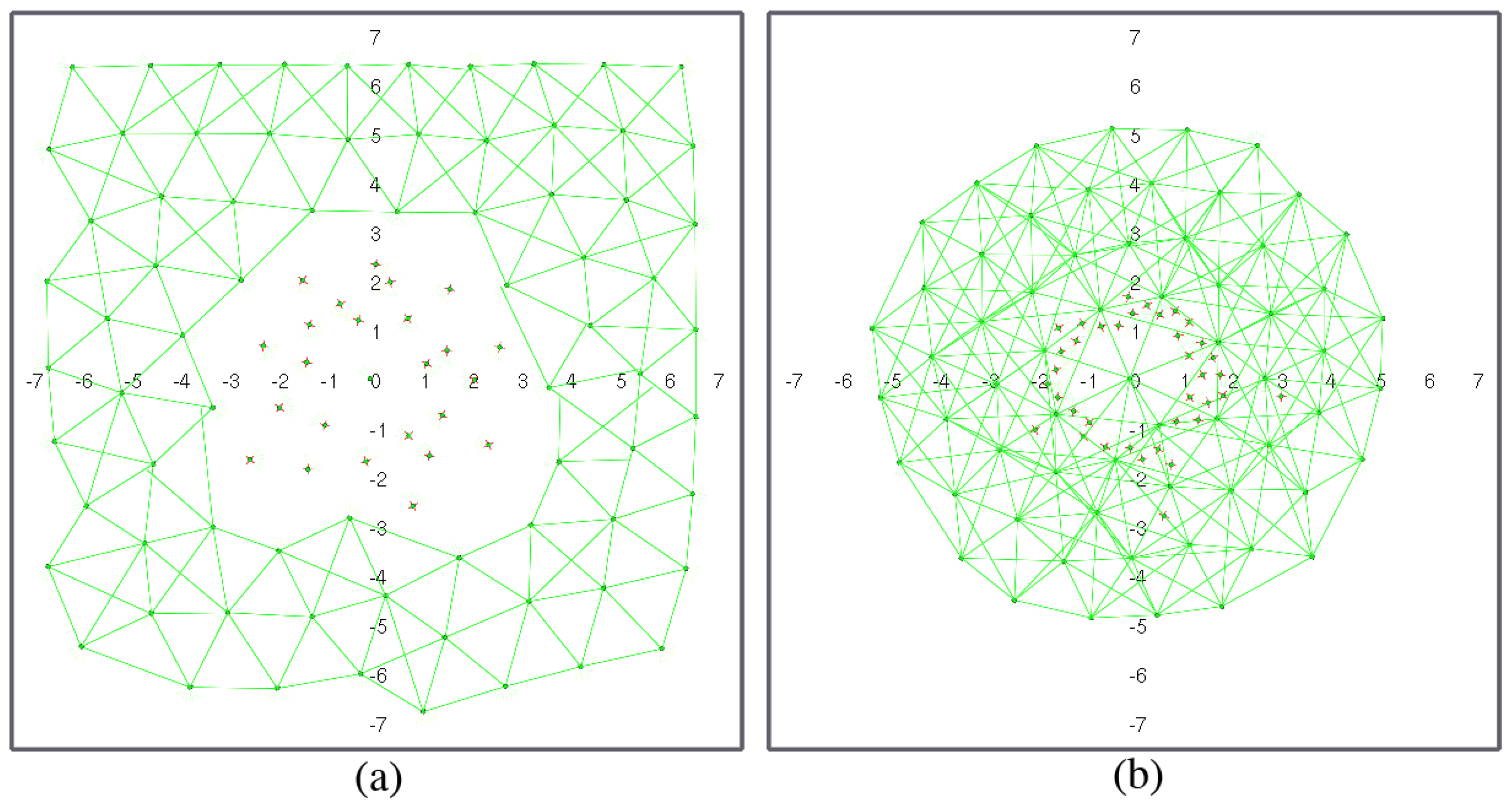
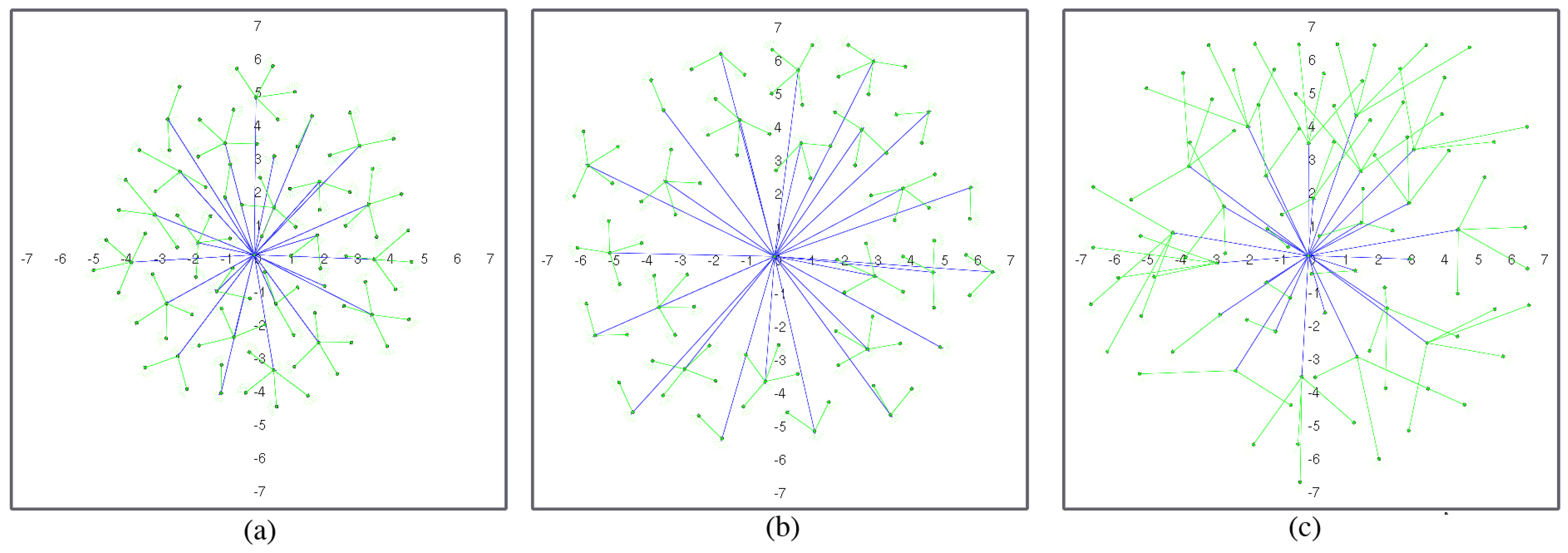
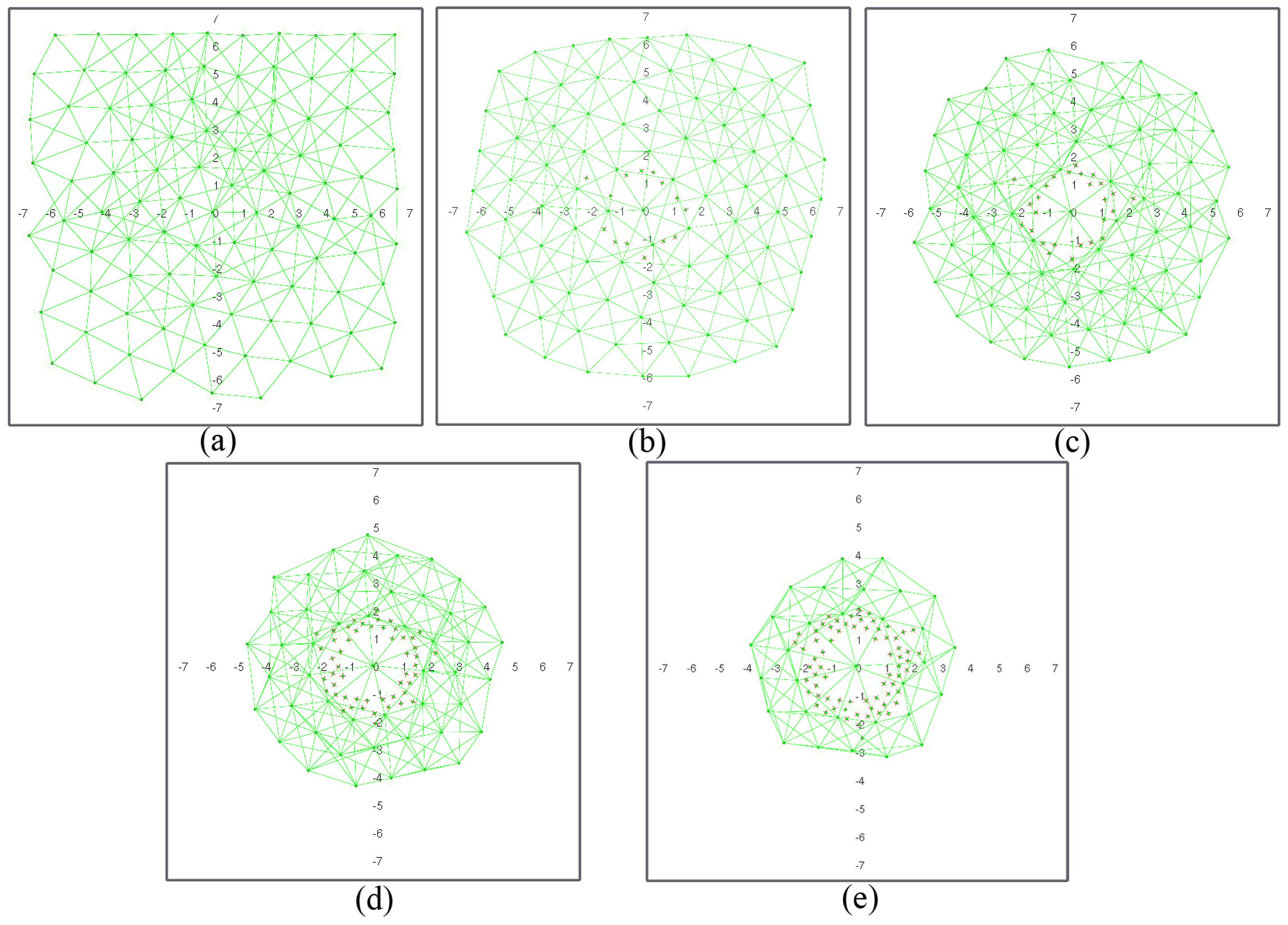
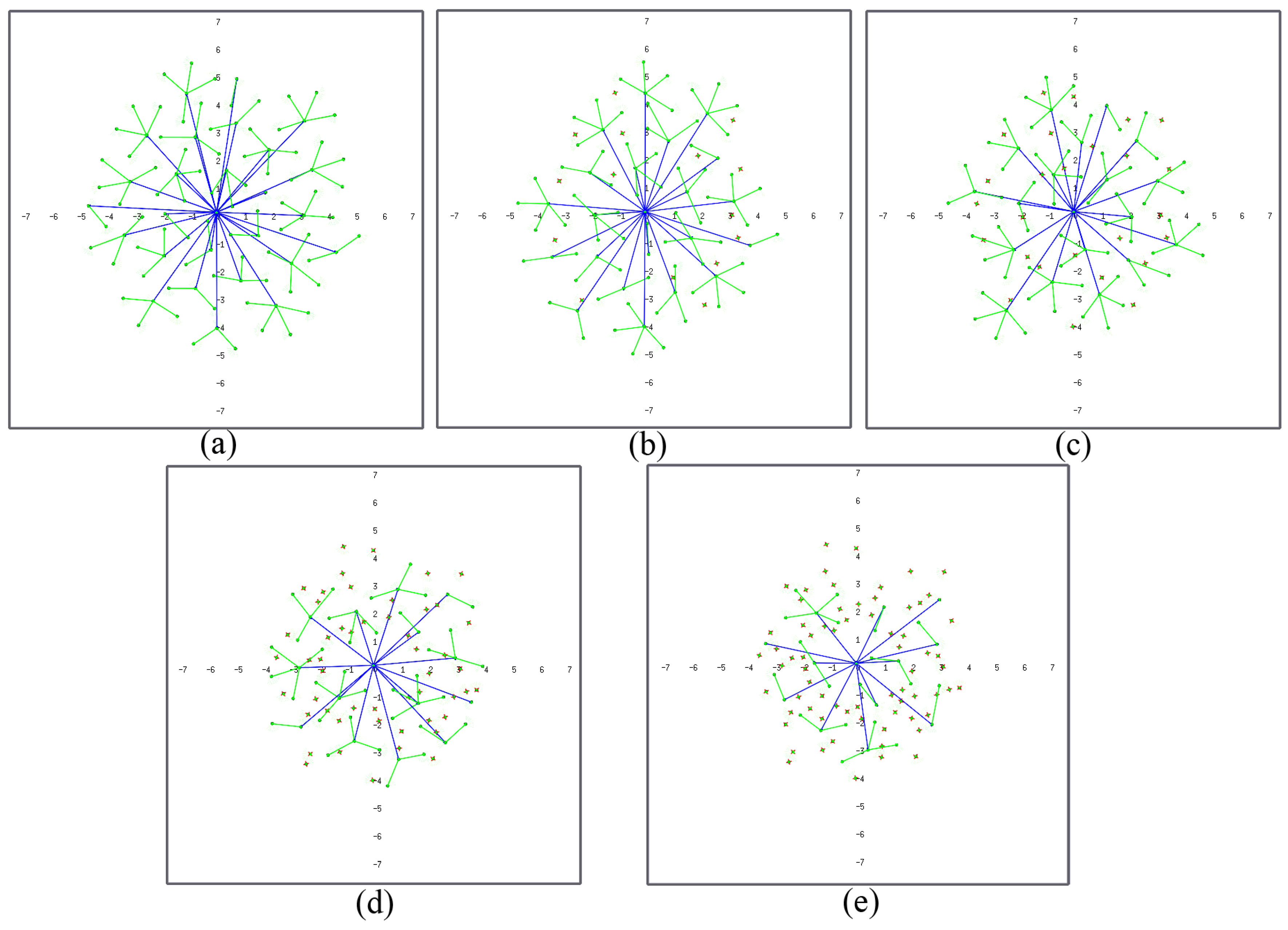
4.1. Topologies after Deployment and Self-Healing
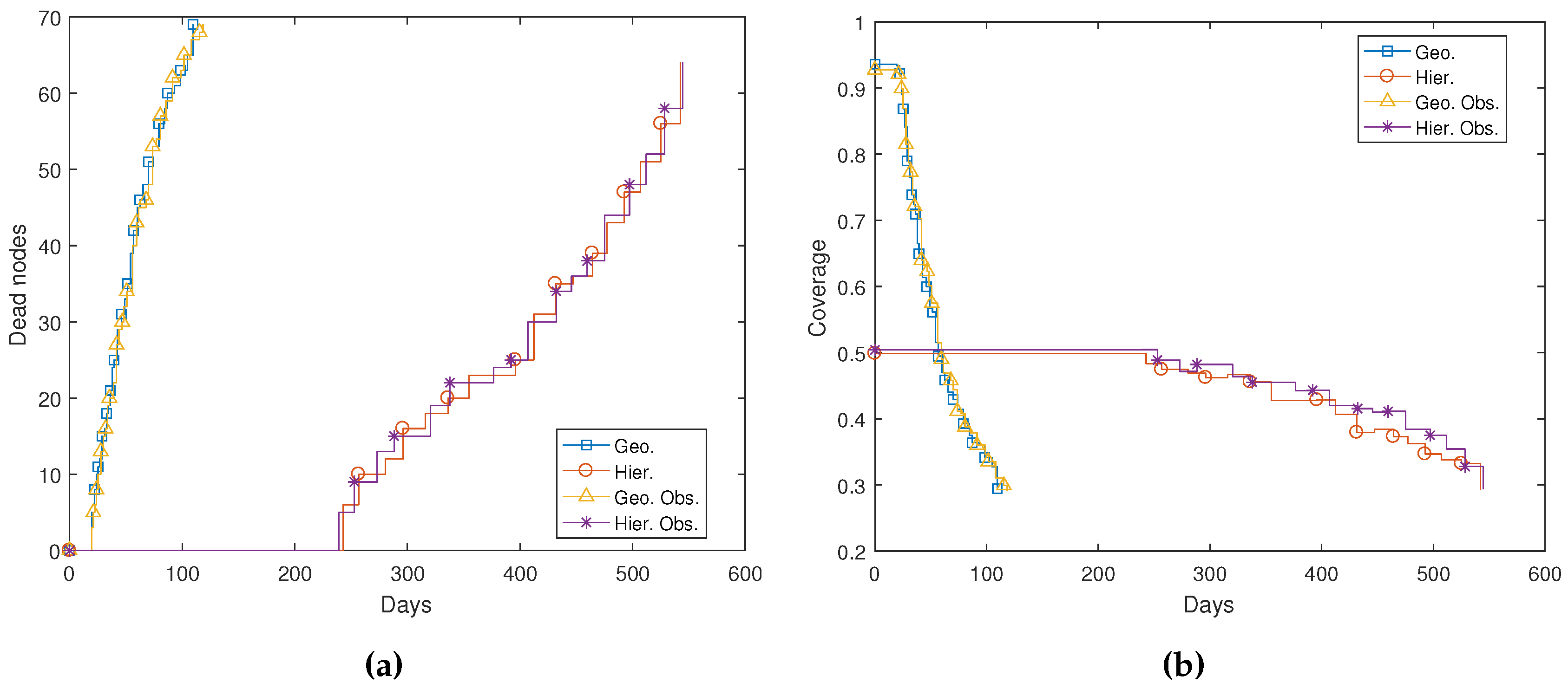
4.2. Coverage and Network Life
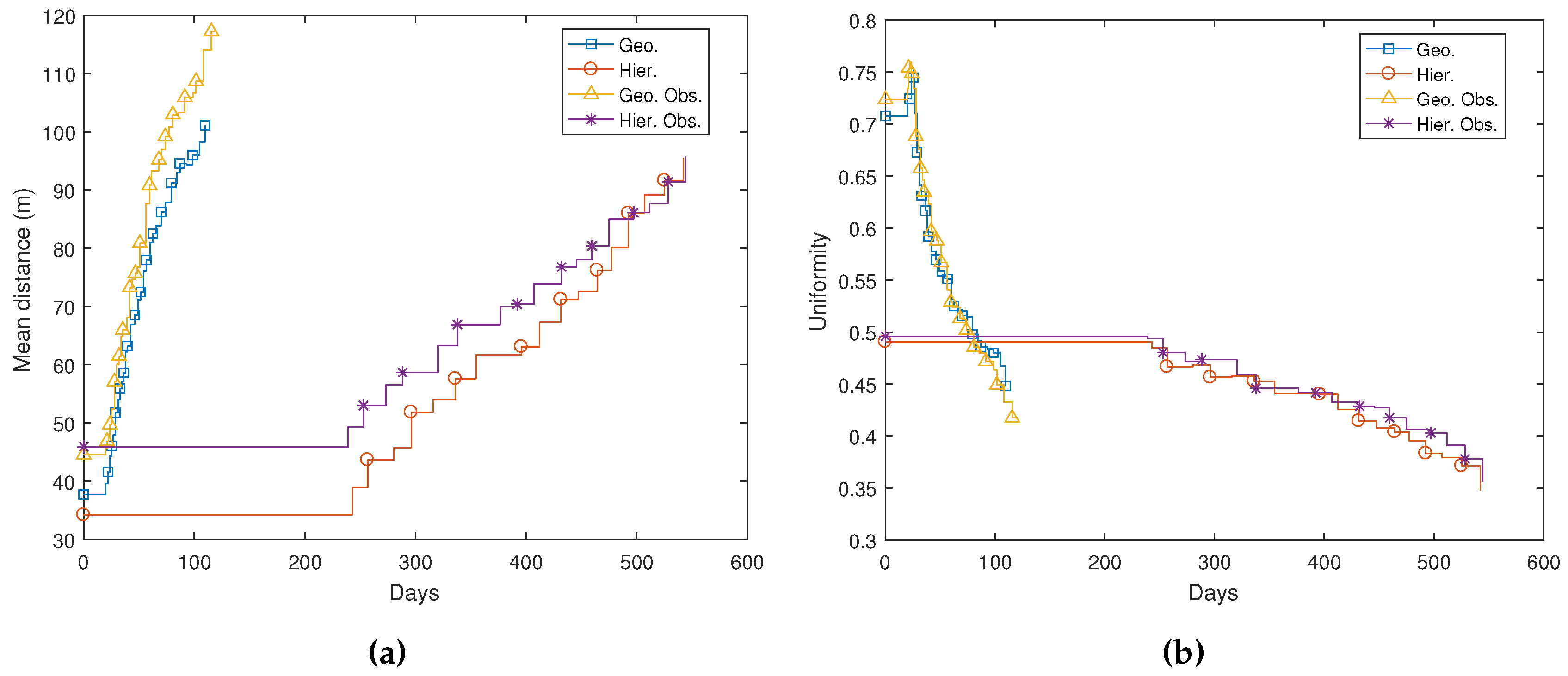
4.3. Node Distribution
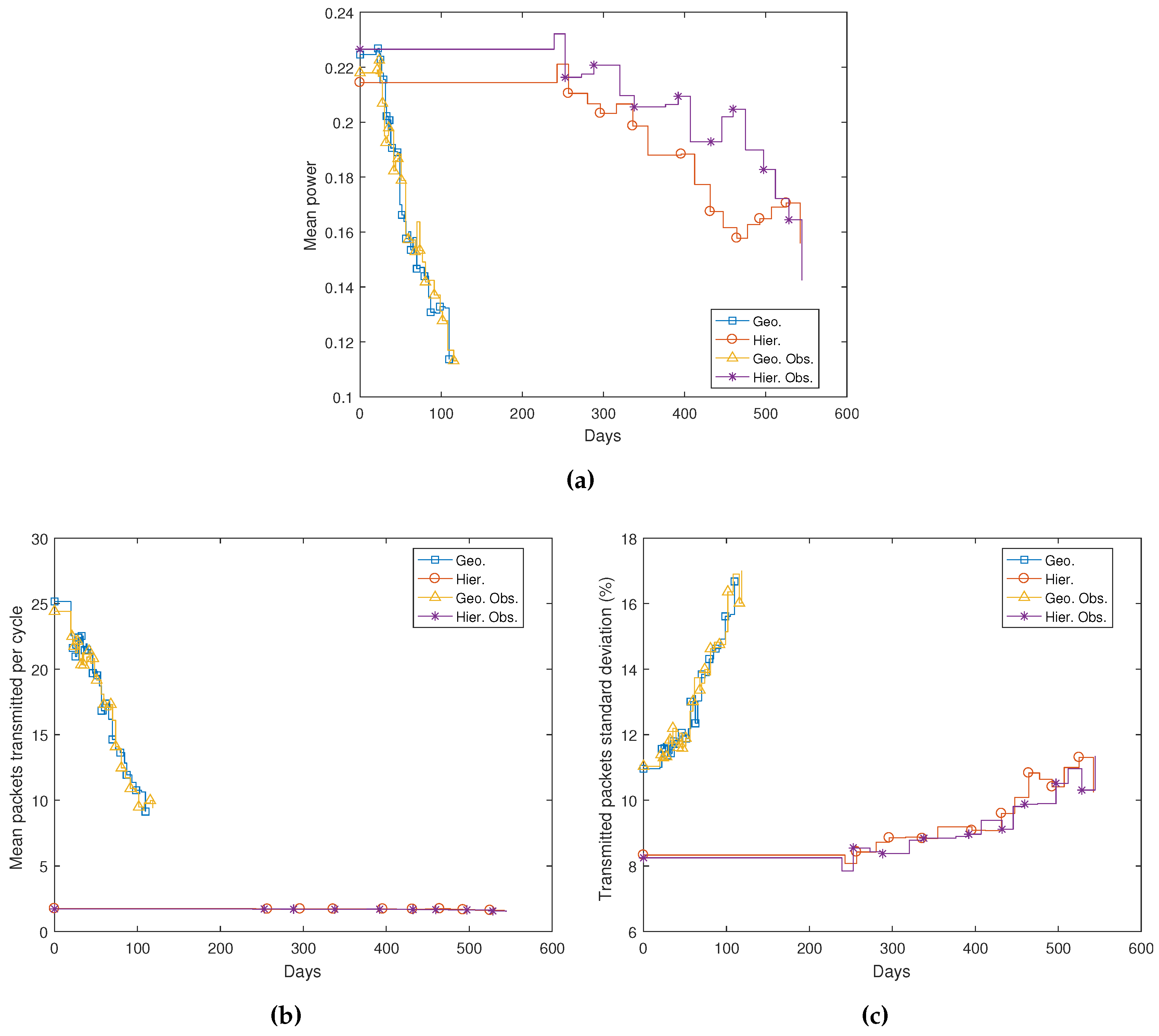
4.4. Power Consumption
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| SPF | Social potential fields |
| MAC | Medium access control |
| MRS | Multiple robot systems |
| MWSN | Mobile wireless sensor network |
| RF | Radio frequency |
| RSS | Received signal strength |
| SN | Sink node |
| WSN | Wireless sensor network |
References
- Robinson, J.; Ng, E.; Robinson, J. A Performance Study of Deployment Factors in Wireless Mesh Networks. In Proceedings of the 26th IEEE International Conference on Computer Communications (IEEE Infocom 2007), Anchorage, AK, USA, 6–12 May 2007; pp. 2054–2062.
- Curiac, D.I. Towards wireless sensor, actuator and robot networks: Conceptual framework, challenges and perspectives. J. Netw. Comput. Appl. 2016, 63, 14–23. [Google Scholar] [CrossRef]
- Vlajic, N.; Moniz, N. Self-healing Wireless Sensor Networks: Results That May Surprise. In Proceedings of the IEEE Global Telecommunications Conference Workshops (GLOBECOM Workshops), Washington, DC, USA, 26–30 November 2007; pp. 333–338.
- Younis, M.; Senturk, I.F.; Akkaya, K.; Lee, S.; Senel, F. Topology management techniques for tolerating node failures in wireless sensor networks: A survey. Comput. Netw. 2014, 58, 254–283. [Google Scholar] [CrossRef]
- Correia, L.H.; Macedo, D.F.; dos Santos, A.L.; Loureiro, A.A.; Nogueira, J.M.S. Transmission power control techniques for wireless sensor networks. Comput. Netw. 2007, 51, 4765–4779. [Google Scholar] [CrossRef]
- Imran, M.; Younis, M.; Haider, N.; Alnuem, M.A. Resource efficient connectivity restoration algorithm for mobile sensor/actor networks. EURASIP J. Wirel. Commun. Netw. 2012, 2012, 347. [Google Scholar] [CrossRef]
- Lee, S.; Younis, M.; Lee, M. Connectivity restoration in a partitioned wireless sensor network with assured fault tolerance. Ad Hoc Netw. 2015, 24, 1–19. [Google Scholar] [CrossRef]
- Vaidya, K.; Younis, M. Efficient failure recovery in Wireless Sensor Networks through active, spare designation. In Proceedings of the 2010 6th IEEE International Conference on Distributed Computing in Sensor Systems Workshops (DCOSSW), Santa Barbara, CA, USA, 21–23 June 2010.
- Younis, M.; Lee, S.; Abbasi, A.A. A Localized Algorithm for Restoring Internode Connectivity in Networks of Moveable Sensors. IEEE Trans. Comput. 2010, 59, 1669–1682. [Google Scholar] [CrossRef]
- Imran, M.; Zafar, N.A.; Alnuem, M.A.; Aksoy, M.S.; Vasilakos, A.V. Formal verification and validation of a movement control actor relocation algorithm for safety–critical applications. Wirel. Netw. 2016, 22, 247–265. [Google Scholar] [CrossRef]
- Alfadhly, A.; Baroudi, U.; Younis, M. Least Distance Movement Recovery approach for large scale wireless sensor and actor networks. In Proceedings of the 2011 7th International Wireless Communications and Mobile Computing Conference, Istanbul, Turkey, 4–8 July 2011; pp. 2058–2063.
- Yick, J.; Mukherjee, B.; Ghosal, D. Wireless Sensor Network Survey. Comput. Netw. 2008, 52, 2292–2330. [Google Scholar] [CrossRef]
- Heo, N.; Varshney, P.K. Energy-efficient Deployment of Intelligent Mobile Sensor Networks. Trans. Syst. Man Cybern. A 2005, 35, 78–92. [Google Scholar] [CrossRef]
- Howard, A.; Mataric, M.J.; Sukhatme, G.S. An incremental self-deployment algorithm for mobile sensor networks. Auton. Robots 2002, 13, 113–126. [Google Scholar] [CrossRef]
- Ferentinos, K.P.; Tsiligiridis, T.A. Adaptive design optimization of wireless sensor networks using genetic algorithms. Comput. Netw. 2007, 51, 1031–1051. [Google Scholar] [CrossRef]
- Kukunuru, N.; Thella, B.R.; Davuluri, R.L. Sensor deployment using particle swarm optimization. Int. J. Eng. Sci. Technol. 2010, 2, 5395–5401. [Google Scholar]
- Kulkarni, R.V.; Venayagamoorthy, G.K. Particle Swarm Optimization in Wireless-Sensor Networks: A Brief Survey. IEEE Trans. Syst. Man Cybern. C Appl. Rev. 2011, 41, 262–267. [Google Scholar] [CrossRef]
- Han, X. Mobile node deployment based on improved probability model and dynamic particle swarm algorithm. J. Netw. 2014, 9, 131–137. [Google Scholar] [CrossRef]
- Yang, J.; Liu, F.; Cao, J.; Wang, L. Discrete Particle Swarm Optimization Routing Protocol for Wireless Sensor Networks with Multiple Mobile Sinks. Sensors 2016, 16, 1081. [Google Scholar] [CrossRef] [PubMed]
- Alfadhly, A.; Baroudi, U.; Younis, M. Optimal node repositioning for tolerating node failure in wireless sensor actor network. In Proceedings of the 2010 25th Biennial Symposium on Communications, Kingston, ON, Canada, 12–14 May 2010; pp. 67–71.
- Bartolini, N.; Calamoneri, T.; Fusco, E.G.; Massini, A.; Silvestri, S. Push & Pull: Autonomous deployment of mobile sensors for a complete coverage. Wirel. Netw. 2010, 16, 607–625. [Google Scholar]
- Jensen, E.; Gini, M. Rolling Dispersion for Robot Teams. In Proceedings of the IJCAI Twenty-Third International Joint Conference on Artificial Intelligence, Beijing, China, 3–9 August 2013.
- Chen, J.; Li, S.; Sun, Y. Novel deployment schemes for mobile sensor networks. Sensors 2007, 7, 2907–2919. [Google Scholar] [CrossRef]
- Zhang, C.; Fei, S. Connectivity-Preserved and Force-Based Deployment Scheme for Mobile Sensor Network. Wirel. Pers. Commun. 2013, 77, 463–475. [Google Scholar] [CrossRef]
- Özdağ, R.; Karcı, A. Probabilistic dynamic distribution of wireless sensor networks with improved distribution method based on electromagnetism-like algorithm. Measurement 2016, 79, 66–76. [Google Scholar] [CrossRef]
- Damer, S.; Ludwig, L.; LaPoint, M.A.; Gini, M.; Papanikolopoulos, N.; Budenske, J. Dispersion and exploration algorithms for robots in unknown environments. In Proceedings of the SPIE Unmanned Systems Technology VIII, Orlando, FL, USA, 17–20 April 2006.
- Othman, S.N. Node positioning in zigbee network using trilateration method based on the received signal strength indicator (RSSI). Eur. J. Sci. Res. 2010, 46, 048–061. [Google Scholar]
- Urdiales, C.; Aguilera, F.; González-Parada, E.; Cano-García, J.; Sandoval, F. Rule-Based vs. Behavior-Based Self-Deployment for Mobile Wireless Sensor Networks. Sensors 2016, 16, 1047. [Google Scholar] [CrossRef] [PubMed]
- Reif, J.H.; Wang, H. Social Potential Fields: A Distributed Behavioral Control for Autonomous Robots. Robot. Auton. Syst. 1999, 27, 171–194. [Google Scholar] [CrossRef]
- Joshi, Y.K.; Younis, M. Autonomous recovery from multi-node failure in Wireless Sensor Network. In Proceedings of 2012 IEEE Global Communications Conference (GLOBECOM), Anaheim, CA, USA, 3–7 December 2012; pp. 652–657.
- Senturk, I.F.; Akkaya, K.; Janansefat, S. Towards realistic connectivity restoration in partitioned mobile sensor networks. Int. J. Commun. Syst. 2016, 29, 230–250. [Google Scholar] [CrossRef]
- Aamodt, K. CC2431 location engine. Application Note AN042 (Rev. 1.0), SWRA095; Texas Instruments: Dallas, TX, USA, 2006; pp. 2–4. [Google Scholar]
- Senturk, I.F.; Akkaya, K. Energy and terrain aware connectivity restoration in disjoint Mobile Sensor Networks. In Proceedings of the 37th Annual IEEE Conference on Local Computer Networks, Clearwater Beach, FL, USA, October 22–25 2012; pp. 767–774.
- Hattori, K.; Owada, N.T.T.K.Y.; Hamaguchi, K. Autonomous deployment algorithm for resilient mobile mesh networks. In Proceedings of the 2014 Asia-Pacific Microwave Conference, Sendai, Japan, 4–7 November 2014; pp. 662–664.
- Kuriakose, J.; Amruth, V.; Sandesh, A.G.; Abhilash, V.; Kumar, G.P.; Nithin, K. A Review on Mobile Sensor Localization. In Security in Computing and Communications, Proceedings of the Second International Symposium, SSCC 2014, Delhi, India, 24–27 September 2014; Springer: Berlin/Heidelberg, Germany, 2014; pp. 30–44. [Google Scholar]
- Thrun, S.; Fox, D.; Burgard, W.; Dellaert, F. Robust Monte Carlo localization for mobile robots. Artif. Intell. 2001, 128, 99–141. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Wang, X.; Wang, W. Wireless Mesh Networks: A Survey. Comput. Netw. ISDN Syst. 2005, 47, 445–487. [Google Scholar] [CrossRef]
- Garcia Villalba, L.J.; Sandoval Orozco, A.L.; Triviño Cabrera, A.; Barenco Abbas, C.J. Routing Protocols in Wireless Sensor Networks. Sensors 2009, 9, 8399–8421. [Google Scholar] [CrossRef] [PubMed]
- Iwanicki, K.; van Steen, M. On Hierarchical Routing in Wireless Sensor Networks. In Proceedings of the 2009 International Conference on Information Processing in Sensor Networks, San Francisco, CA, USA, 13–16 April 2009.
- Ghosh, A.; Das, S.K. Review: Coverage and Connectivity Issues in Wireless Sensor Networks: A Survey. Pervasive Mob. Comput. 2008, 4, 303–334. [Google Scholar] [CrossRef]
- Heo, N.; Varshney, P.K. A Distributed Self Spreading Algorithm for Mobile Wireless Sensor Networks. IEEE Wirel. Commun. Netw. 2003, 3, 1597–1602. [Google Scholar]
- Hedges, R.; Stoy, K. The Player/Stage project. Available online: http://playerstage.sourceforge.net/ (accessed on 1 December 2016).
- Gerkey, B.P.; Vaughan, R.T.; Howard, A. The Player/Stage Project: Tools for Multi-Robot and Distributed Sensor Systems. In Proceedings of the 11th International Conference on Advanced Robotics, Coimbra, Portugal, 30 June– 3 July 2003; pp. 317–323.
- Texas Instruments, Inc. CC2500 Low-Cost Low-Power 2.4 GHz RF Transceiver. Rev. C.; Texas Instruments, Inc.: Dallas, TX, USA, 2016. [Google Scholar]
- Alfayez, F.; Hammoudeh, M.; Abuarqoub, A. A Survey on MAC Protocols for Duty-cycled Wireless Sensor Networks. Procedia Comput. Sci. 2015, 73, 482–489. [Google Scholar] [CrossRef]
- Dunkels, A. The Contikimac Radio Duty Cycling Protocol; Technical Report, Swedish Institute of Computer Science: Stockholm, Sweden, 2011. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Force | Geographic Routing | Hierarchical Routing | |||
|---|---|---|---|---|---|
| L1 vs. SN | L1 vs. L1/L0 | L0 vs. L1 | L0 vs. L0 | ||
| — | — | ||||
© 2017 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
González-Parada, E.; Cano-García, J.; Aguilera, F.; Sandoval, F.; Urdiales, C. A Social Potential Fields Approach for Self-Deployment and Self-Healing in Hierarchical Mobile Wireless Sensor Networks. Sensors 2017, 17, 120. https://doi.org/10.3390/s17010120
González-Parada E, Cano-García J, Aguilera F, Sandoval F, Urdiales C. A Social Potential Fields Approach for Self-Deployment and Self-Healing in Hierarchical Mobile Wireless Sensor Networks. Sensors. 2017; 17(1):120. https://doi.org/10.3390/s17010120
Chicago/Turabian StyleGonzález-Parada, Eva, Jose Cano-García, Francisco Aguilera, Francisco Sandoval, and Cristina Urdiales. 2017. "A Social Potential Fields Approach for Self-Deployment and Self-Healing in Hierarchical Mobile Wireless Sensor Networks" Sensors 17, no. 1: 120. https://doi.org/10.3390/s17010120
APA StyleGonzález-Parada, E., Cano-García, J., Aguilera, F., Sandoval, F., & Urdiales, C. (2017). A Social Potential Fields Approach for Self-Deployment and Self-Healing in Hierarchical Mobile Wireless Sensor Networks. Sensors, 17(1), 120. https://doi.org/10.3390/s17010120