
TPLE: A Reliable Data Delivery Scheme for On-Road WSN Traffic Monitoring

Abstract
:1. Introduction
- (1)
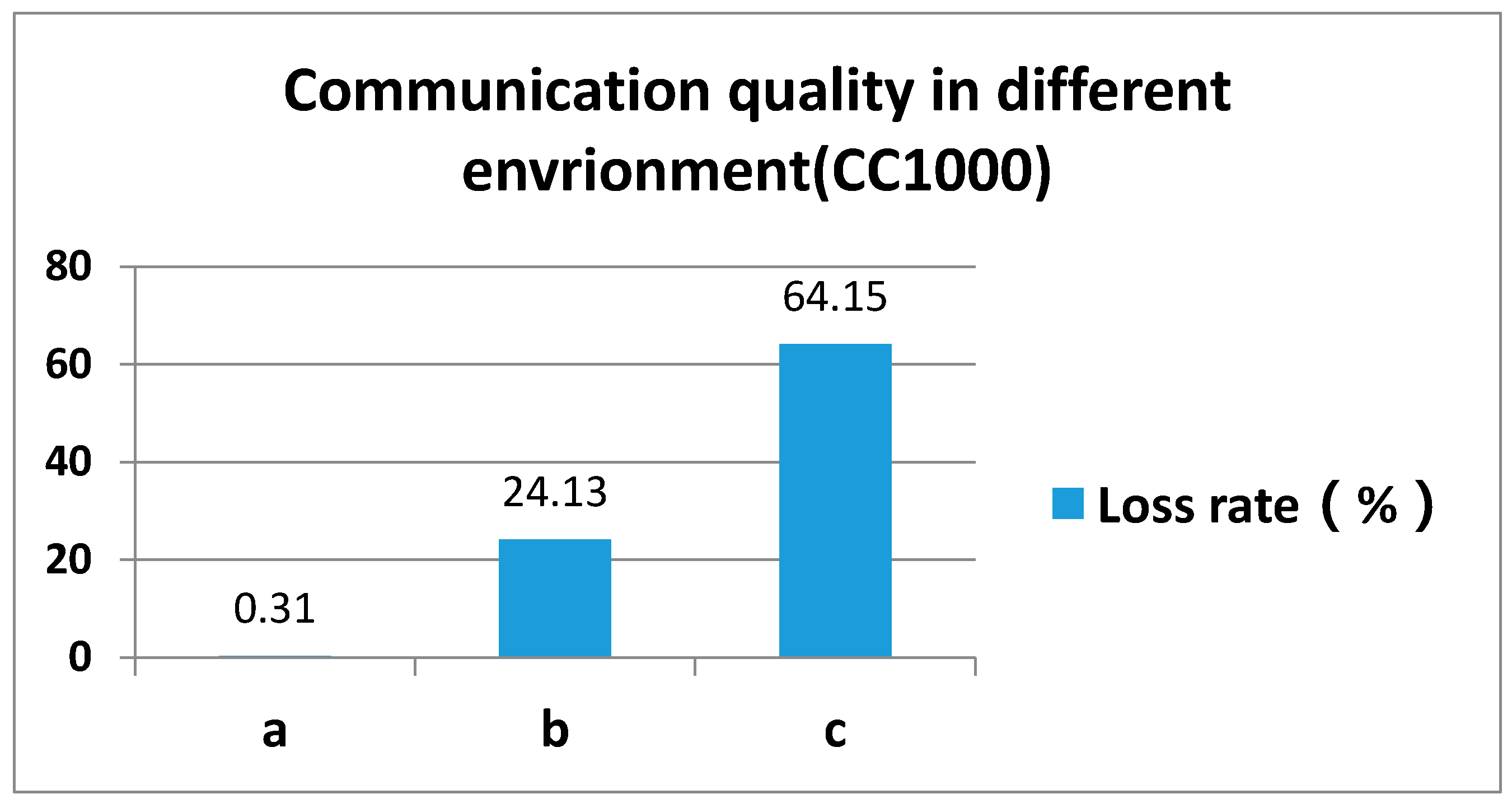
- Two nodes placed an indoor environment.
- (2)
- Two sensor nodes placed an outdoor non-traffic environment.
- (3)
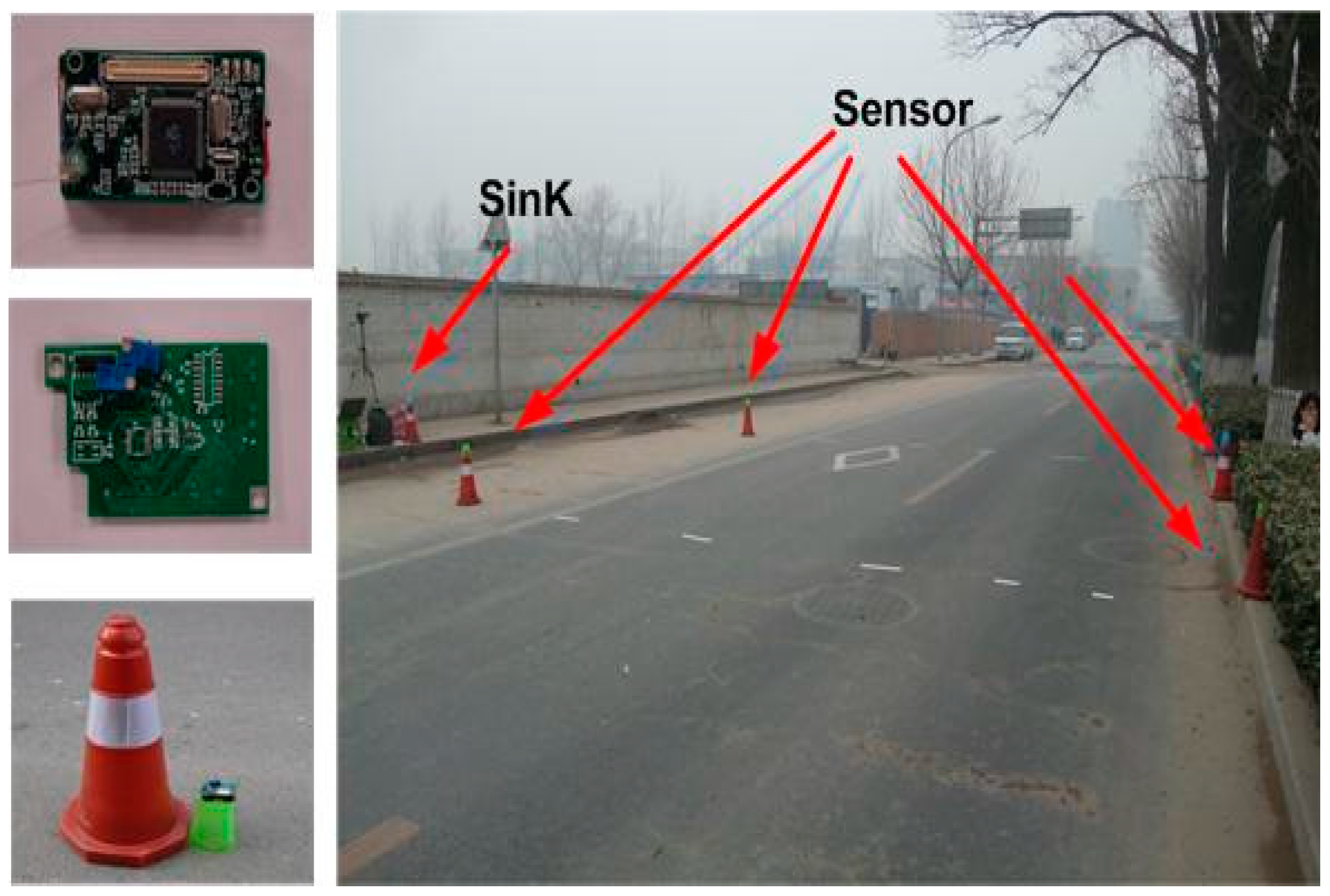
- Two sensor nodes placed along the road sides (where heavy vehicles run on the road).
- (1)
- The wireless communication quality in on-road environments is relatively poor compared to other environments. The main reason for the worst radio communication quality is engine noises nearby the wireless vicinity.
- (2)
- The running and passing vehicles caused huge distortion to wireless link quality. The unstable and unpredictable nature of link quality gave rise to poor performance of data delivery, such as low delivery rate, high time delay, etc.
- We proposed the TPLE scheme which can effectively deal with strong noises caused by on-road motor engines targets.
- With this scheme, we obtain relatively high radio communication quality with the acceptable cost of time delay with respect to data delivery.
- We developed a real-time application to verify our proposed scheme; our system can be applied in pervasive on-road data collection.
2. Related Work
2.1. Frame-Based Solutions
2.2. Physical-Based Solutions
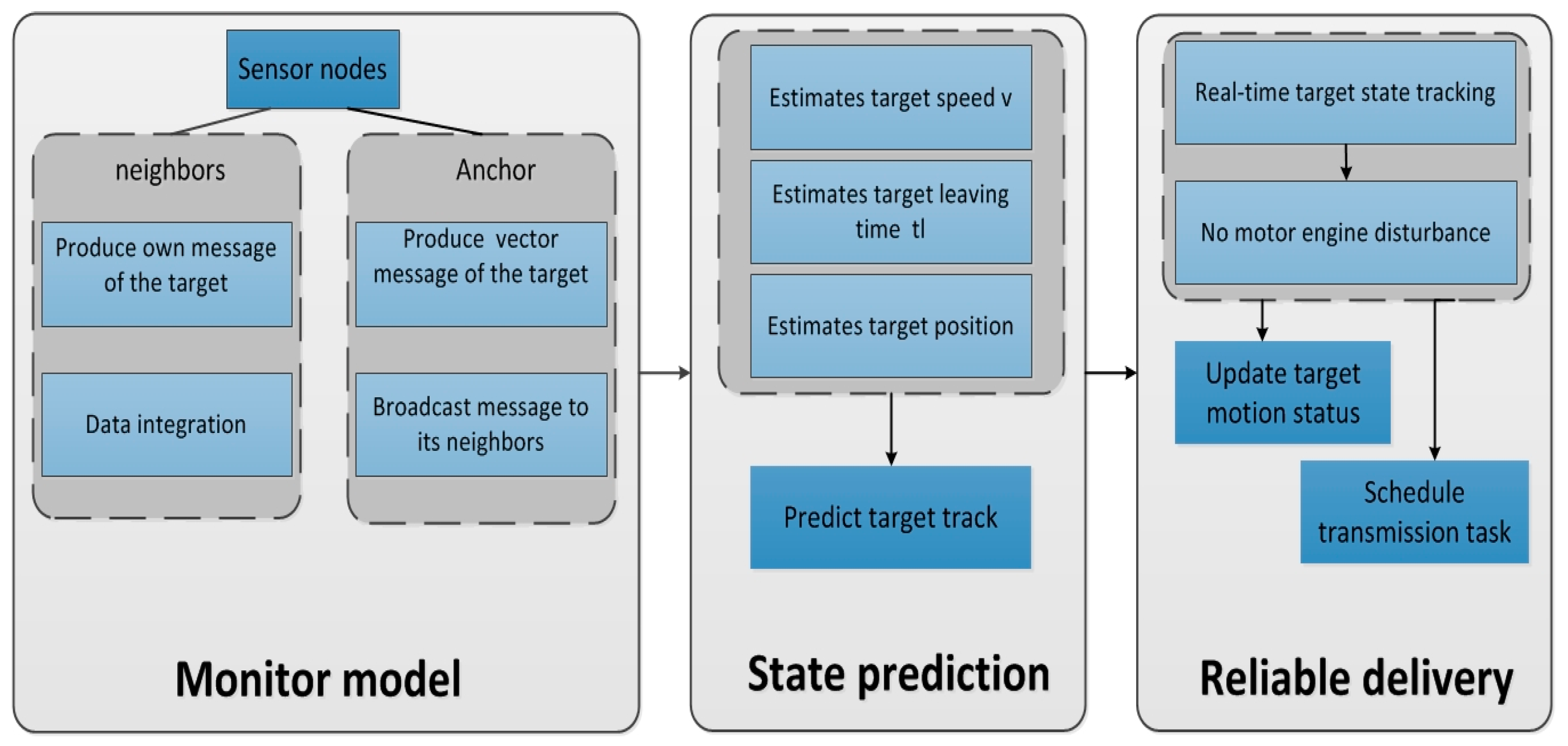
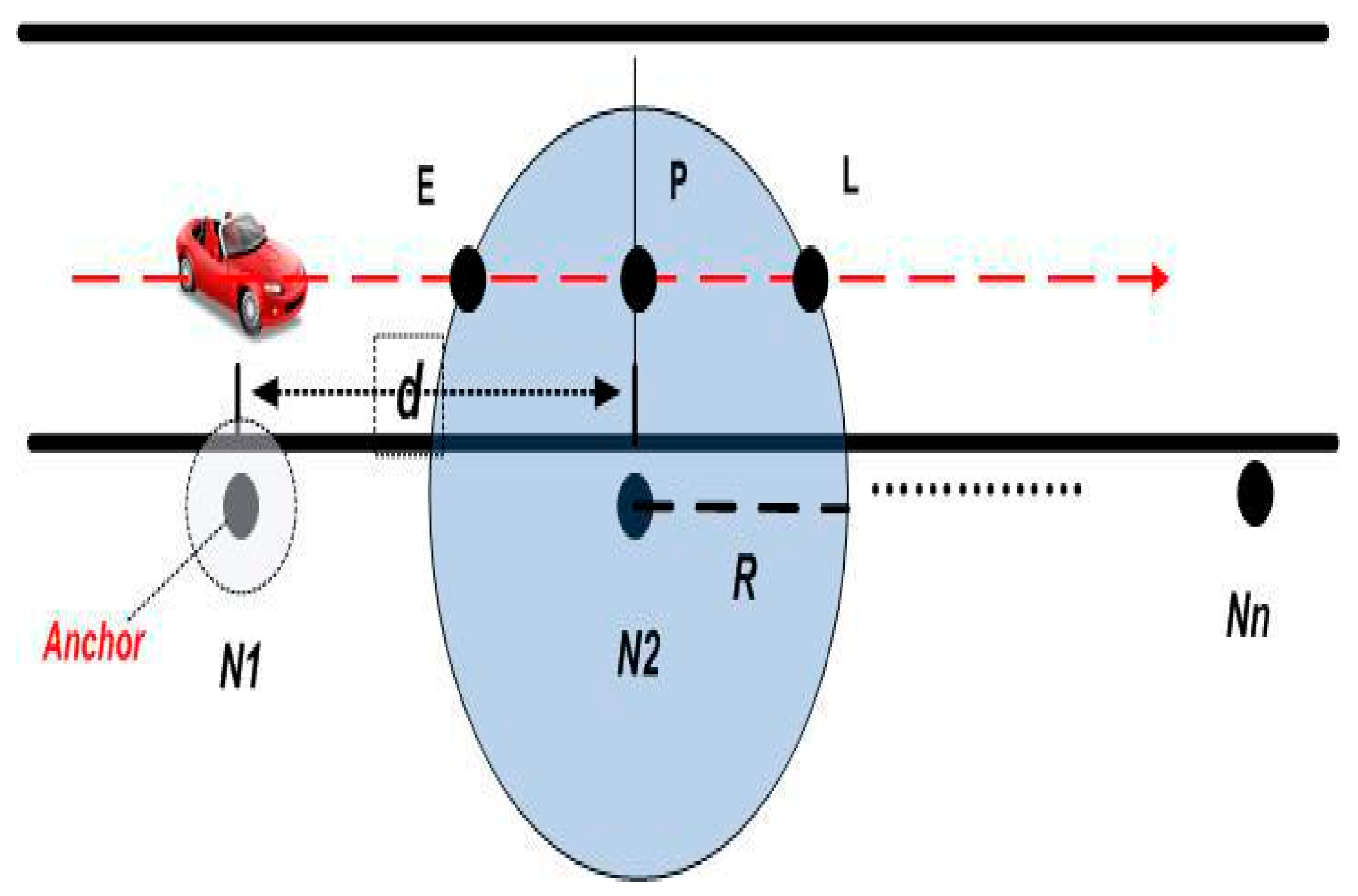
3. TPLE: Target-Prediction-Based Link Quality Estimation Mechanism
3.1. TPLE Algorithm for Link Quality Estimation
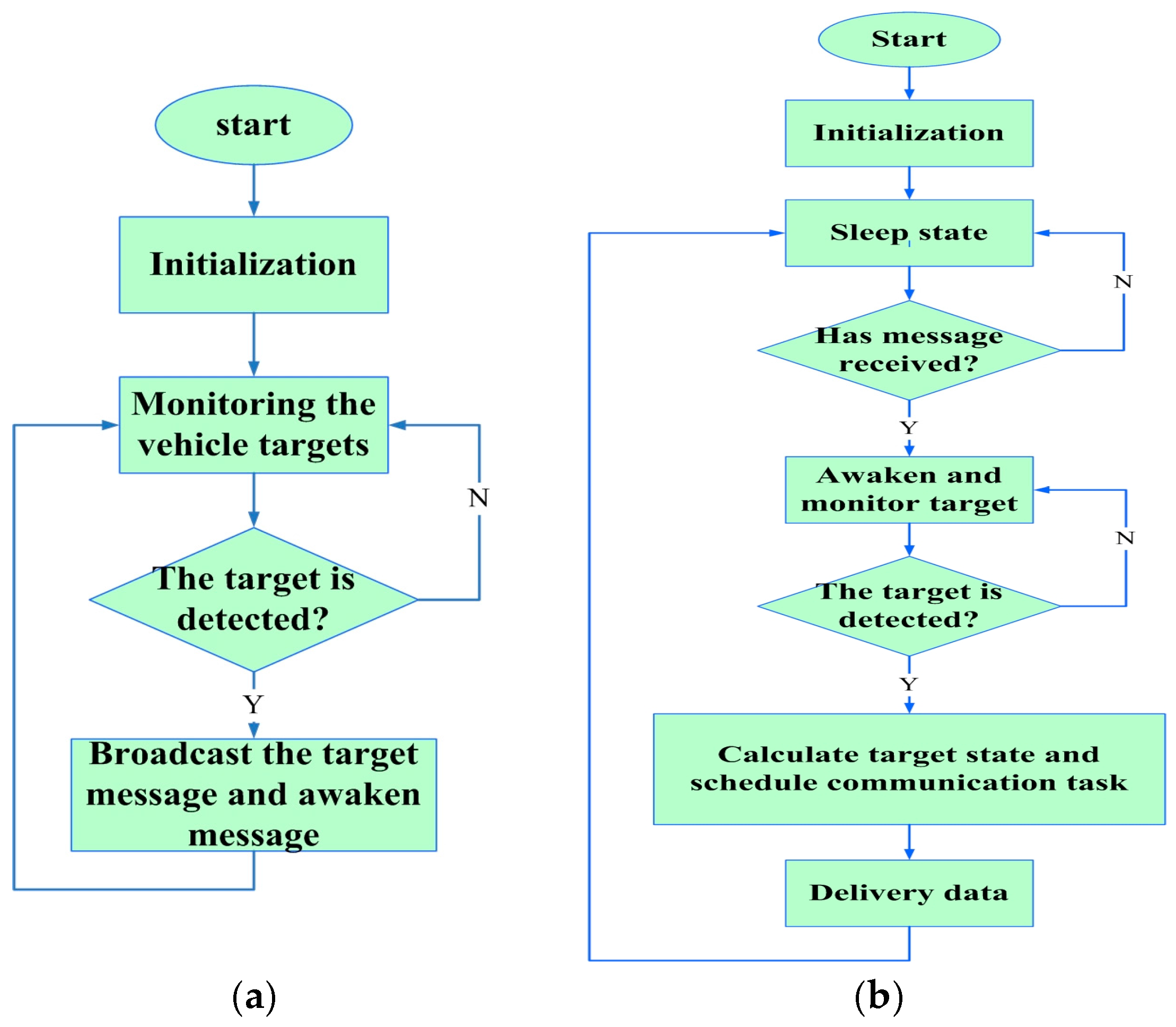
3.2. Reliable Data Delivery Scheme
4. Verification and Experiment
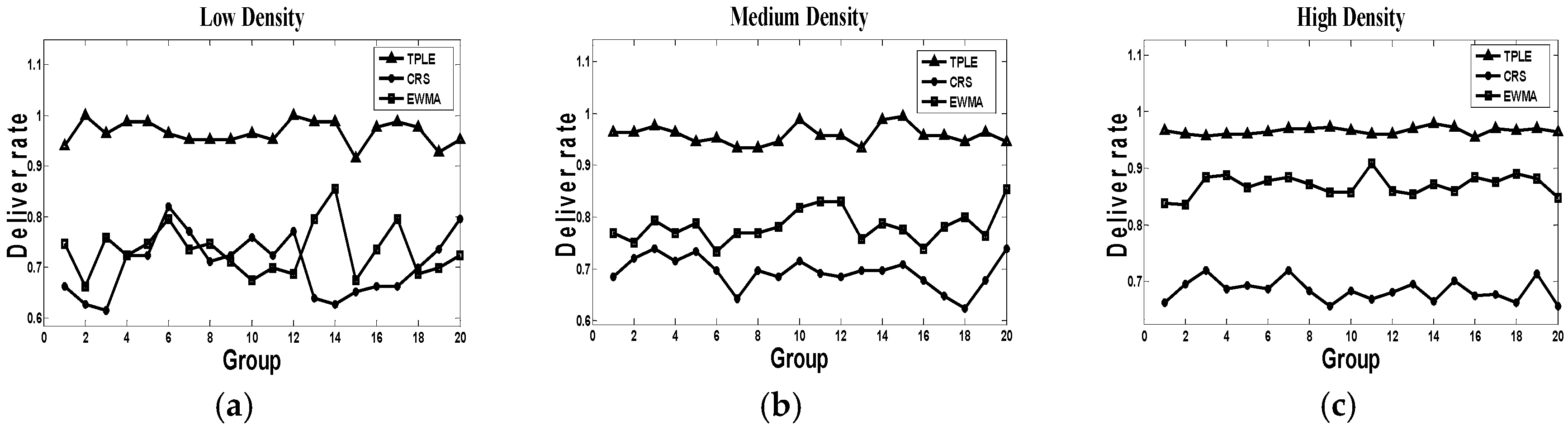
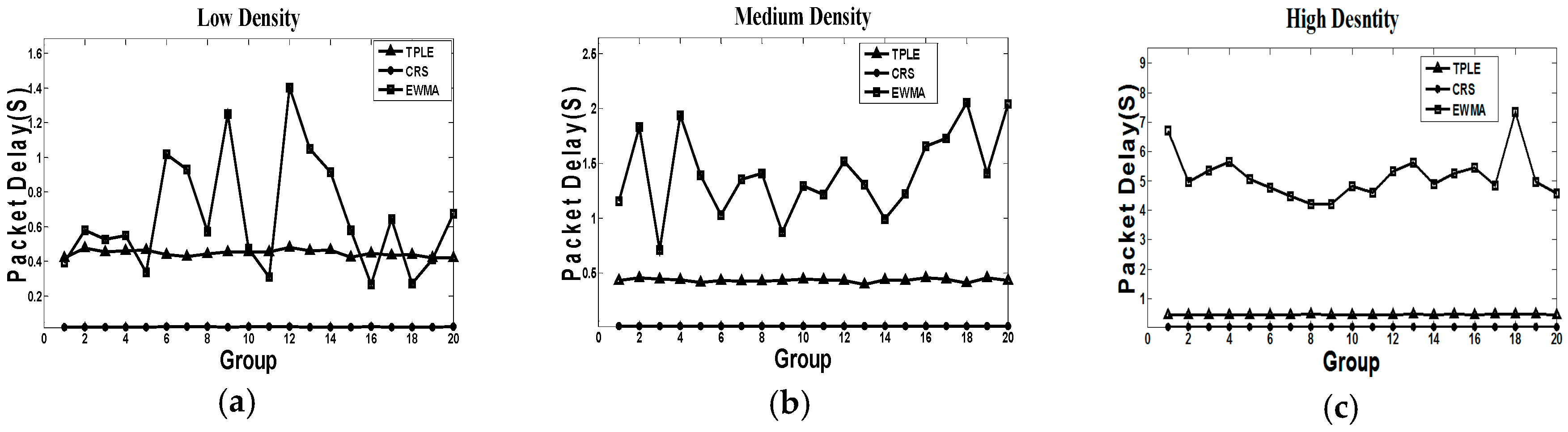
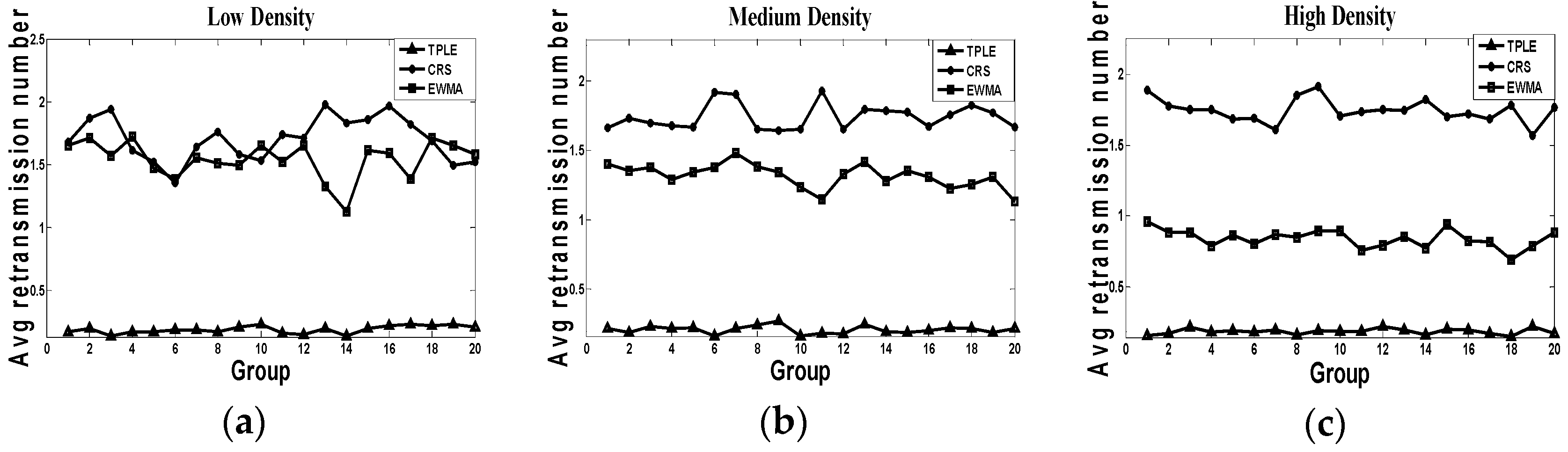
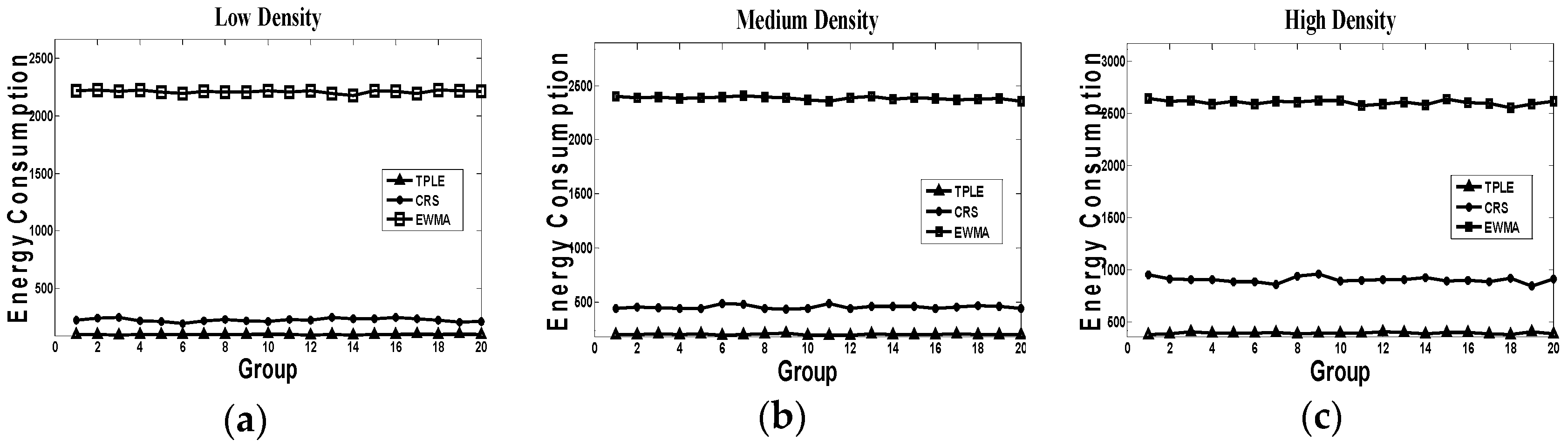
4.1. Simulations
4.2. On-Road Verification Experiments
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Lee, W.H.; Tseng, S.S.; Shieh, W.Y. Collaborative real time traffic information generation and sharing framework for the intelligent transportation system. Inf. Sci. 2010, 180, 62–70. [Google Scholar] [CrossRef]
- Coleri, S.; Cheung, S.; Varaiya, P. Sensor networks for monitoring traffic. In Proceedings of the Allerton Conference on Communication, Control and Computing, Monticello, IL, USA, 29 September–1 October 2004; pp. 32–40.
- He, T.; Krishnamurthy, S.; Stankovic, J.; Abdelzahber, T.; Luo, L.; Stoleru, R.; Yan, T.; Gu, L.; Hui, J.; Krogh, B. Energy efficient surveillance system using wireless sensor networks. In Proceedings of the 2nd International Conference on Mobile Systems Applications and Services, Boston, MA, USA, 6–9 June 2004; pp. 270–283.
- Chen, W.J.; Chen, L.F.; Chen, Z.L.; Tu, S.L. A realtime dynamic traffic control system based on wireless sensor network. In Proceedings of the 34th International Conference on Parallel Processing Workshops, Oslo, Norway, 14–17 June 2005; pp. 258–264.
- Gu, L.; Jia, D.; Vicaire, P.; Yan, T.; Luo, L.; Tirumala, A.; Cao, Q.; He, T.; Stankovic, J.; Abdelzaher, T.; et al. Light weight detection and classification for wireless sensor networks in realistic environments. In Proceedings of the 3rd International Conference on Embedded Networked Sensor Systems, San Diego, CA, USA, 2–4 November 2005; pp. 205–217.
- Texas Instruments. CC1000: Single Chip Very Low Power RF Transceiver; Texas Instruments: Dallas, TX, USA, 2010. [Google Scholar]
- Rayanchu, S.; Mishra, A.; Agrawal, D.; Saha, S.; Banerjee, S. Diagnosing wireless packet losses in 802. 11: Separating collision from weak signal. In Proceedings of the 27th IEEE Conference on Computer Communications, Phonenix, AZ, USA, 13–18 April 2008; pp. 735–743.
- Vutukuru, M.; Balakrishnan, H.; Jamieson, K. Cross layer wireless bit rate adaptation. In ACM SIGCOMM Computer Communication Review; ACM Publications: New York, NY, USA, 2009; Volume 39, pp. 3–14. [Google Scholar]
- Wu, K.; Tan, H.; Ngan, H.L.; Liu, Y.; Ni, L.M. Chip error pattern analysis in IEEE 802.15.4. IEEE Trans. Mob. Comput. 2012, 11, 543–552. [Google Scholar]
- Eu, Z.A.; Lee, P.; Tan, H.P. Classification of packet transmissions outcomes in wireless sensor networks. In Proceedings of the 2011 IEEE International Conference on Communications (ICC), Kyoto, Japan, 5–9 June 2011; pp. 1–5.
- Wong, S.H.; Yang, H.; Lu, S.; Bharghavan, V. Robust rate adaptation for 802.11 wireless networks. In Proceedings of the 12th Annual International Conference on Mobile Computing and Networking, Los Angeles, CA, USA, 24–29 September 2006; pp. 146–157.
- Kim, S.; Verma, L.; Choi, S.; Qiao, D. Collision aware rate adaptation in multi rate WLAN: Design and implementation. Comput. Netw. 2010, 54, 3011–3030. [Google Scholar] [CrossRef]
- Khan, M.A.Y.; Veitch, D. Isolating physical per for s-mart rate selection in 802.11. In Proceedings of the IEEE INFOCOM 2009, Rio de Janeiro, Brazil, 19–25 April 2009; pp. 1080–1088.
- Sugano, M.; Kawazoe, T.; Ohta, Y.; Murata, M. Indoor localization system using RSSI measurement of wireless sensor network based on ZigBee standard. In Proceedings of the 2006 Wireless and Optical Communication Conference, Banff, AB, Canada, 3–4 July 2006; pp. 1–6.
- Viani, F.; Robol, F.; Giarola, E.; Benedetti, G.; De Vigili, S.; Massa, A. Advances in wildlife road-crossing early-alert system: New architecture and experimental validation. In Proceedings of the IEEE 8th European Conference on Antennas and Propagation (EuCAP 2014), The Hague, The Netherlands, 6–11 April 2014; pp. 3457–3461.
- Suhonen, J.; Kohvakka, M.; Hannikainen, M.; Hannikainen, T.D. Design, implementation, and experiments on outdoor deployment of wireless sensor network for environmental monitoring. In Embedded Computer Systems: Architectures, Modeling, and Simulation; Springer: Berlin/Heidelberg, Germany, 2006; pp. 109–121. [Google Scholar]
- Jin, M.; Zhou, X.; Luo, E.; Qing, X. Industrial-QoS-Oriented Remote Wireless Communication Protocol for the Internet of Construction Vehicles. IEEE Trans. Ind. Electr. 2015, 62, 7103–7113. [Google Scholar] [CrossRef]
- Ghirmai, T. Distributed Particle Filter for Target Tracking: With Reduced Sensor Communications. Sensors 2016, 16, 1454. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Q.; Song, T.L. Improved Bearings-Only Multi-Target Tracking with GM-PHD Filtering. Sensors 2016, 16, 1469. [Google Scholar] [CrossRef] [PubMed]
- Zhu, W.; Wang, W.; Yuan, G. An Improved Interacting Multiple Model Filtering Algorithm Based on the Cubature Kalman Filter for Maneuvering Target Tracking. Sensors 2016, 16, 805. [Google Scholar] [CrossRef] [PubMed]
- Kalman, R. A new approach to linear filtering and prediction problems. J. Basic Eng. 1960, 82, 167–175. [Google Scholar] [CrossRef]
- Niu, Q.; Yang, X.; Gao, S.; Chen, P.; Chan, S. Achieving Passive Localization with Traffic Light Schedules in Urban Road Sensor Networks. Sensors 2016, 16, 1662. [Google Scholar] [CrossRef] [PubMed]
- Wang, R.; Zhang, L.; Sun, R.; Gong, J.; Cui, L. Easitia: A pervasive traffic information acquisition system based on wireless sensor networks. IEEE Trans. Intell. Transp. Syst. 2011, 12, 615–621. [Google Scholar] [CrossRef]
- Levis, P.; Gay, D. TinyOS Programming; Cambridge University Press: Cambridge, UK, 2009. [Google Scholar]
- Van Dam, T.; Langendoen, K. An adaptive energy-efficient MAC protocol for wireless sensor networks. In Proceedings of the International Conference on Embedded Networked Sensor Systems, Los Angeles, CA, USA, 5–7 November 2003; pp. 23–27.
- Mi, X.; Zhao, H.; Zhu, J. Research on EWMA based link quality evaluation algorithm for WSN. In Proceedings of the IEEE Cross Strait Quad-Regional Radio Science and Wireless Technology Conference, Harbin, China, 26–30 July 2011; pp. 757–759.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Description |
|---|---|---|
| Dn2n-Dn2n | 6 m | Distance between neighbor nodes |
| V | 5 m/s–15 m/s | Vehicle speed |
| MaxDv2vmaxDv2v | 5 m | Minimal distance between two vehicles |
| R | 4 m | Radius of a nodes magnetic field |
| F1-F1 | 0.8 | Packet delivery rate without vehicle in influential scope |
| Pf-Pf | 0.25 | Packet delivery rate with vehicle in influential scope |
| Baud rate | 19.2 kbps | Radio rate |
| Packet size | 28 bytes | Radio packet size 0 |
| Delivery Rate | Packet Delay | Retransmission Number | |
|---|---|---|---|
| Group 1 | 82.54% | 1.08s | 0.71 |
| Group 2 | 85.87% | 0.84s | 0.73 |
| Group 3 | 94.11% | 0.81s | 0.61 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, R.; Chang, F.; Ren, S. TPLE: A Reliable Data Delivery Scheme for On-Road WSN Traffic Monitoring. Sensors 2017, 17, 44. https://doi.org/10.3390/s17010044
Wang R, Chang F, Ren S. TPLE: A Reliable Data Delivery Scheme for On-Road WSN Traffic Monitoring. Sensors. 2017; 17(1):44. https://doi.org/10.3390/s17010044
Chicago/Turabian StyleWang, Rui, Fei Chang, and Suli Ren. 2017. "TPLE: A Reliable Data Delivery Scheme for On-Road WSN Traffic Monitoring" Sensors 17, no. 1: 44. https://doi.org/10.3390/s17010044
APA StyleWang, R., Chang, F., & Ren, S. (2017). TPLE: A Reliable Data Delivery Scheme for On-Road WSN Traffic Monitoring. Sensors, 17(1), 44. https://doi.org/10.3390/s17010044