Estimation of the Driving Style Based on the Users’ Activity and Environment Influence




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- The total number of road traffic deaths remains unacceptably high at 1.25 million per year;
- More than half of road traffic deaths in Europe are car occupants;
- In addition to deaths on the roads, up to 50 million people incur nonfatal injuries each year as a result of road traffic accidents;
- Globally an estimated 3% of gross domestic product (GDP) is lost due to road traffic deaths and injuries.
2. Related Work
2.1. Drivers’ Self-Reports and Questionnaires
2.2. Simulation Scenarios
2.3. Experts’ Assessment of the Driver’s Style
2.4. Driving Data Analysis
2.5. Methods Using the Drivers’ Physiological and Environment Parameters
3. Experiment Setup and Procedure
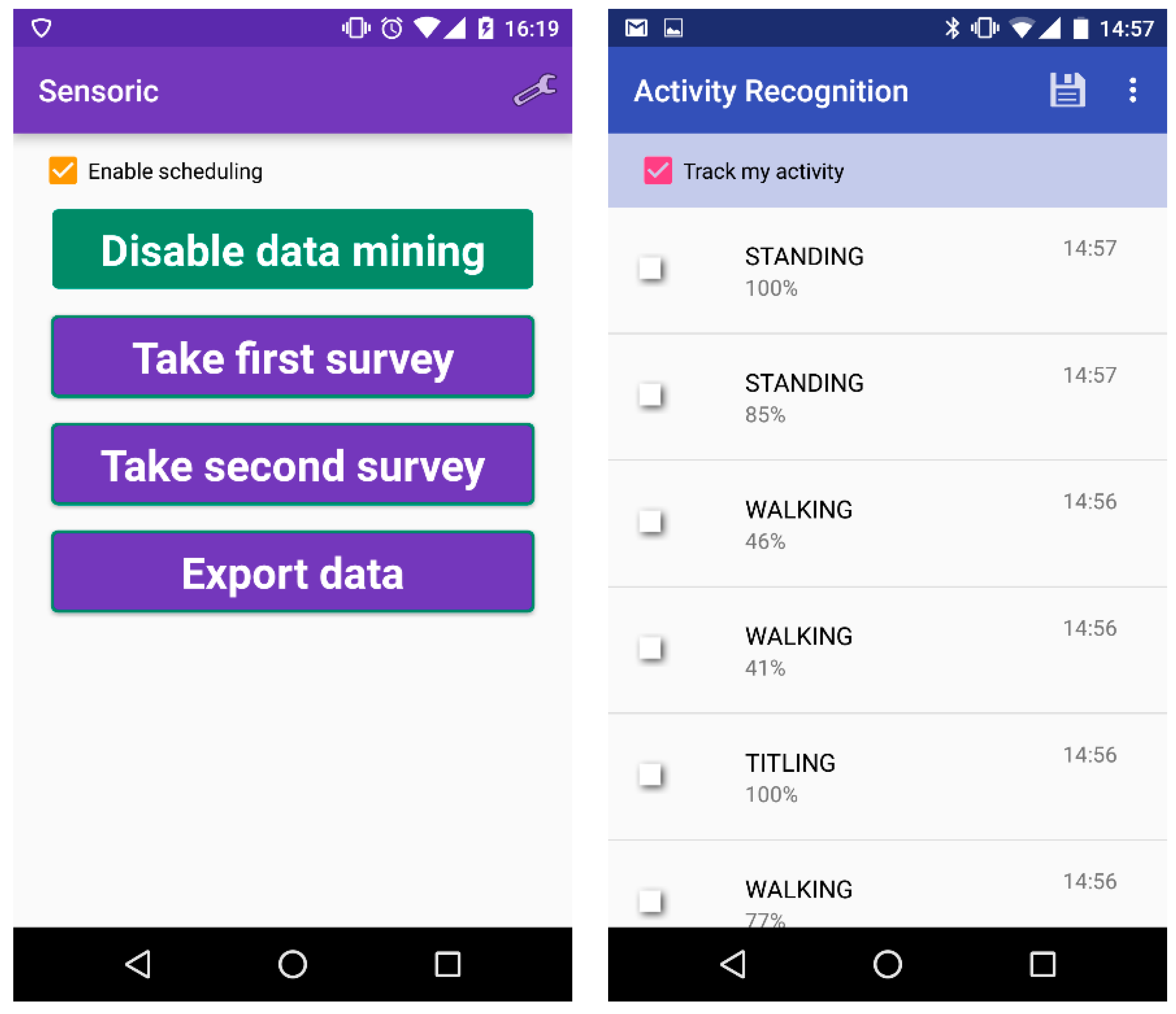
3.1. User Environment Data Collection Using the Smartphone
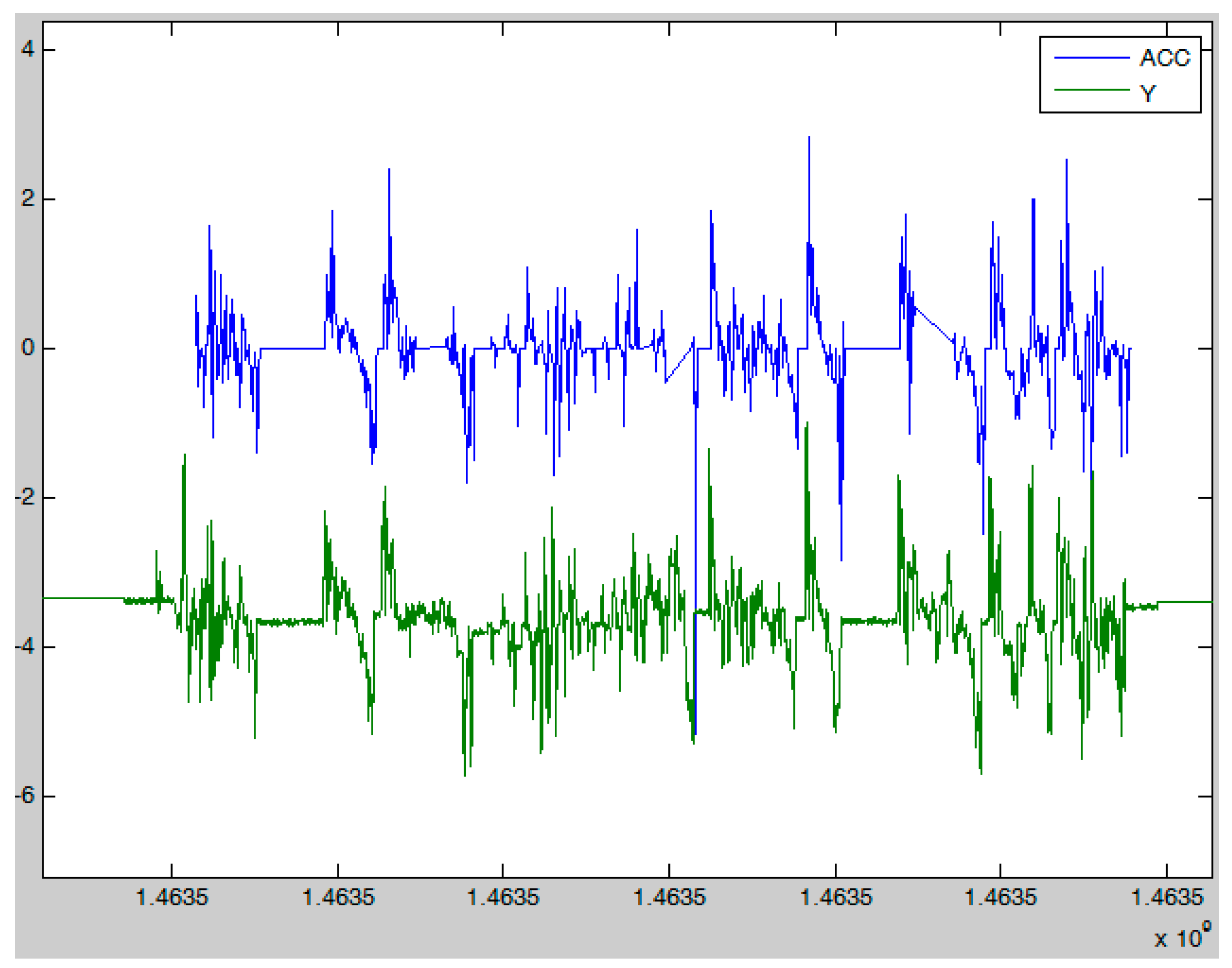
3.2. Heart Rate Data
3.3. GPS Data
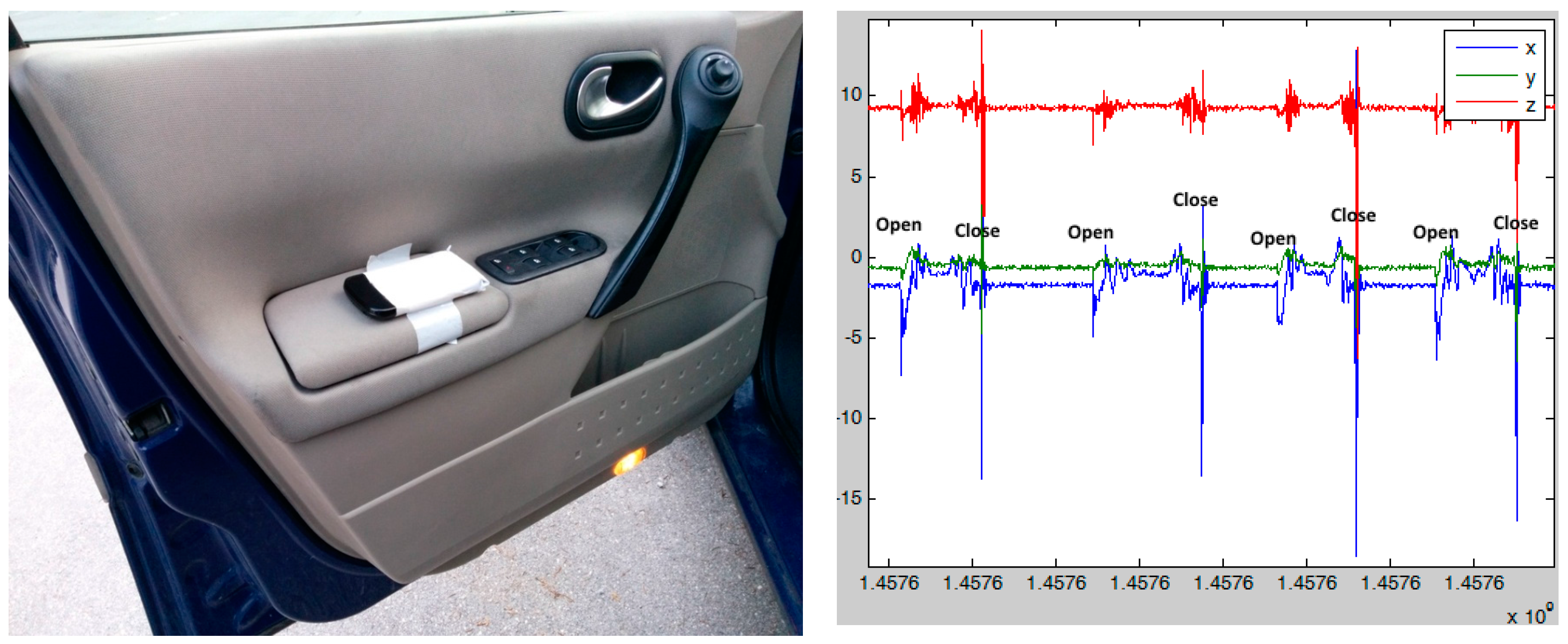
3.4. The Car Door Data
- Time between opening and closing the car door;
- Time between opening the car door and starting the engine;
- Intensity of the car door movement (how fast one opens/closes the car door).
3.5. Description of the Experiment
- An Android smartphone for collecting the car door data. A handmade holder with a mobile phone is depicted in Figure 4 (during the experiment the phone was permanently fixed in the car door in the same position);
- The other smartphone in the experiment was always the participant’s private mobile phone in order to be able to collect his/her environment and activity data with sensors embedded into a smartphone, and to avoid using additional devices;
- A car—each participant’s private car;
- A U-blox GPS device for gathering speed and acceleration data.
3.6. Procedure
4. Results and Discussion
4.1. Driving Style Self-Assessment
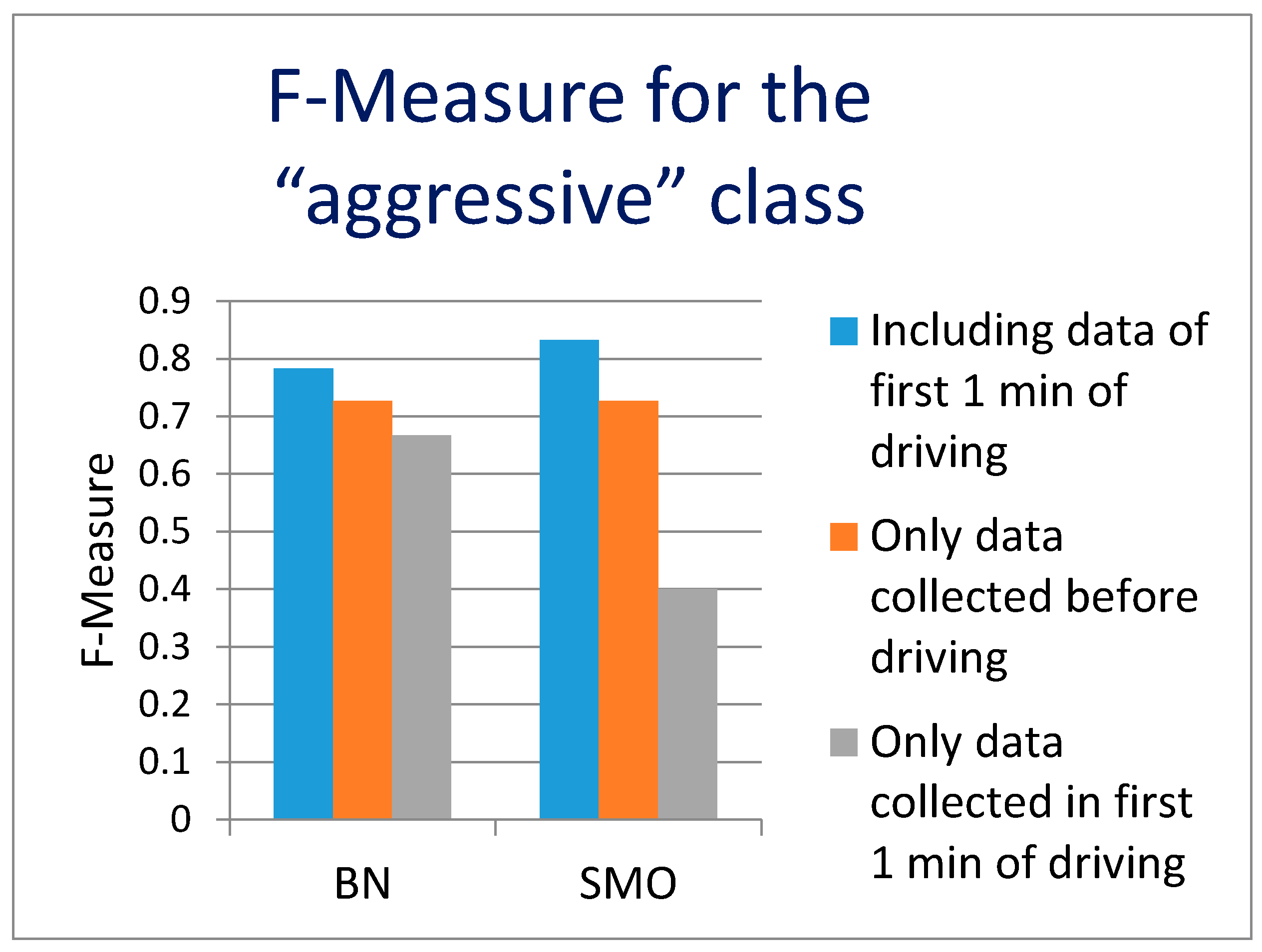
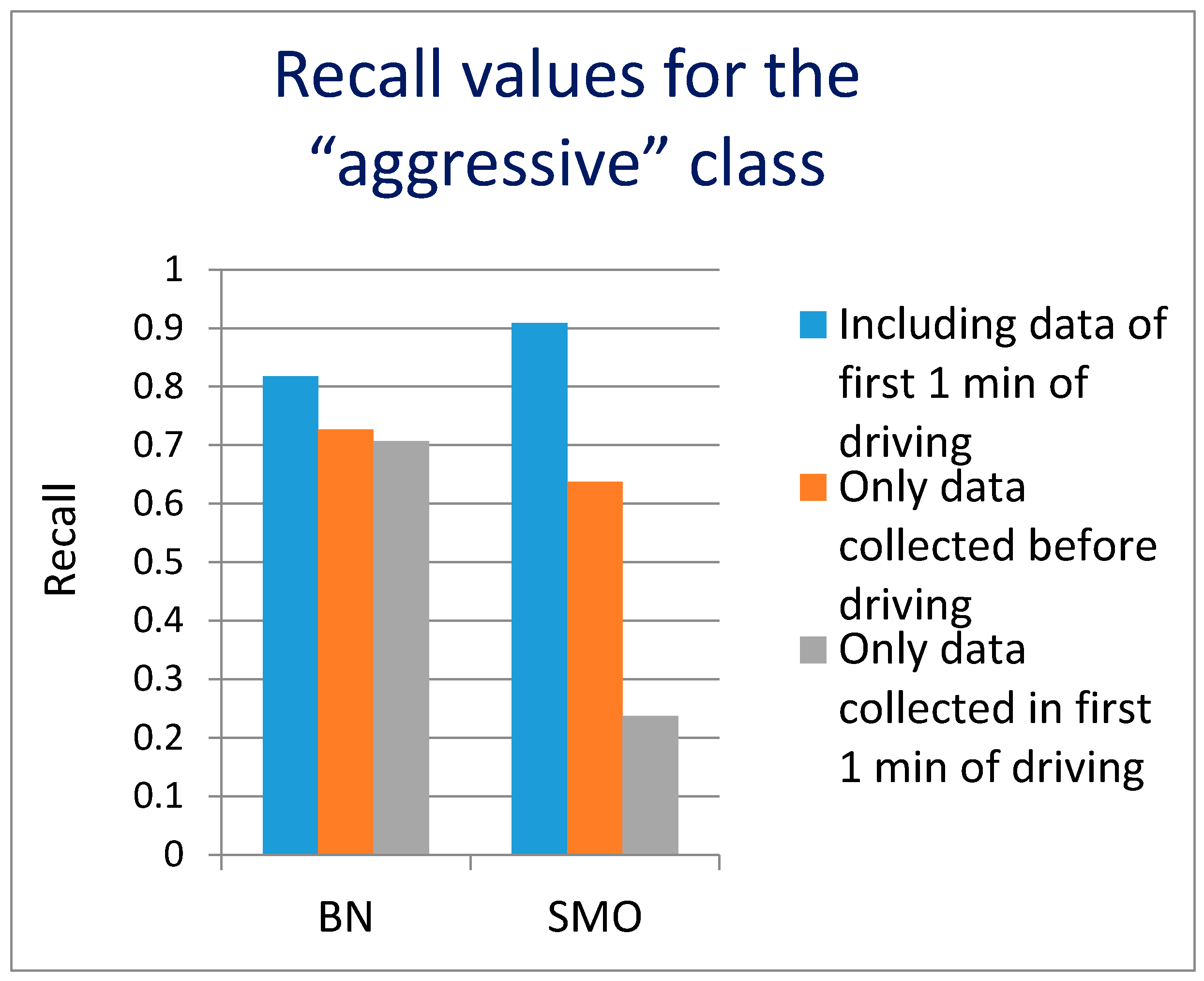
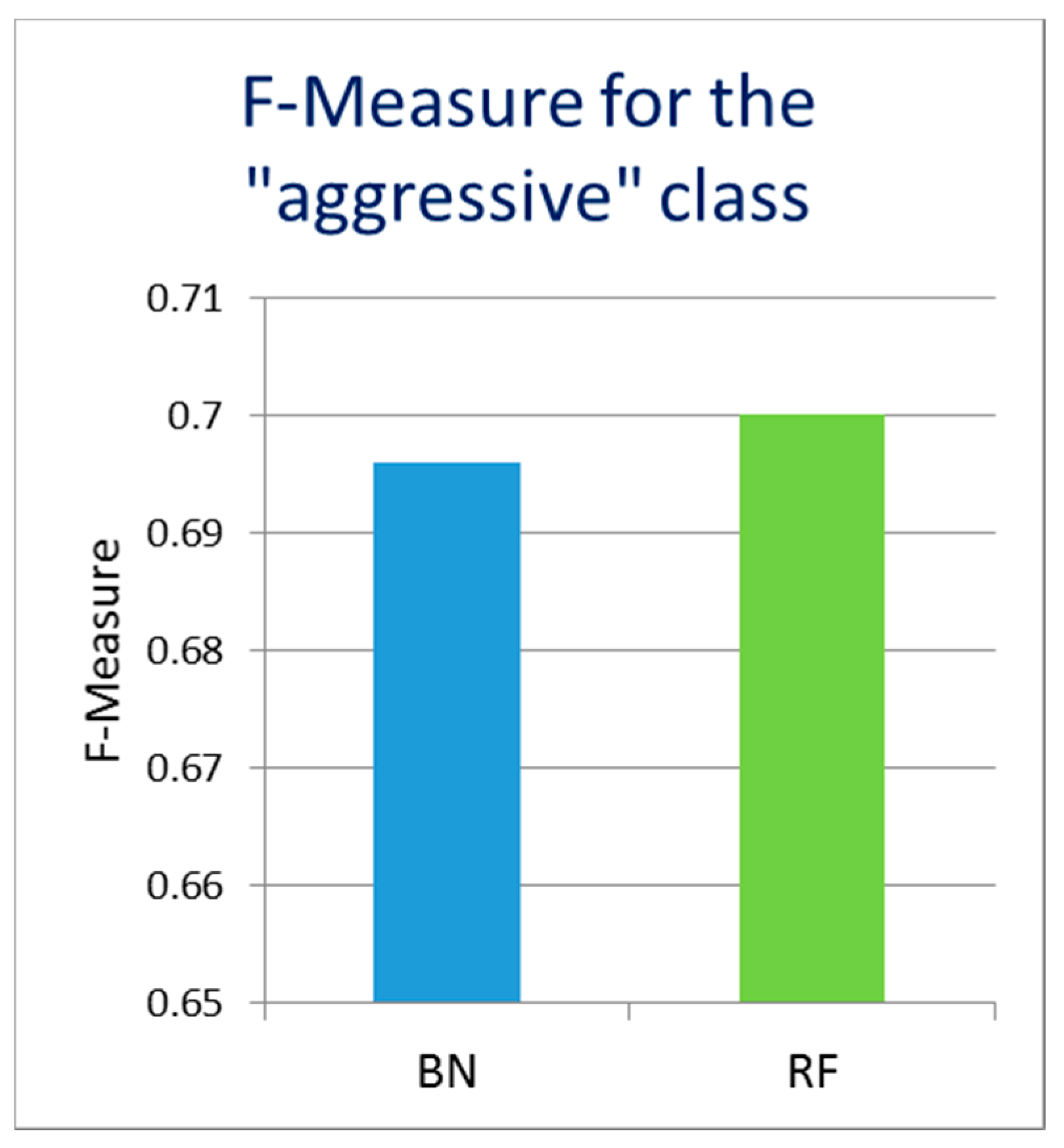
4.2. Prediction of the Driving Style—Full Data Set
4.3. Prediction of the Driving Style—Personal Smartphone as the Only Data Source
4.4. Limitations of the Study
5. Conclusions and Future Work
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Porkodi, R.; Bhuvaneswari, V. The Internet of Things (IoT) Applications and Communication Enabling Technology Standards: An Overview. In Proceedings of the International Conference on Intelligent Computing Applications, Coimbatore, India, 6–7 March 2014; pp. 324–329. [Google Scholar]
- WHO. Global status report on road safety. 2015. Available online: http://www.who.int/violence_injury_prevention/road_safety_status/2015/GSRRS2015_Summary_EN_final2.pdf (accessed on 21 August 2017).
- Reason, J.; Manstead, A.; Stradling, S.; Baxter, J.; Campbell, K. Errors and violations on the roads: A real distinction? Ergonomics 1990, 33, 1315–1332. [Google Scholar] [CrossRef] [PubMed]
- Berdoulat, E.; Vavassori, D.; Sastre, M.T.M. Driving anger, emotional and instrumental aggressiveness, and impulsiveness in the prediction of aggressive and transgressive driving. Accid. Anal. Prev. 2013, 50, 758–767. [Google Scholar] [CrossRef] [PubMed]
- Houston, J.M.; Harris, P.B.; Norman, M. The Aggressive Driving Behavior Scale: Developing a self-report measure of unsafe driving practices. N. Am. J. Psychol. 2003, 5, 269–278. [Google Scholar]
- Martinussen, L.M.; Møller, M.; Prato, C.G. Assessing the relationship between the Driver Behavior Questionnaire and the Driver Skill Inventory: Revealing sub-groups of drivers. Transp. Res. Part F Traffic Psychol. Behav. 2014, 26, 82–91. [Google Scholar] [CrossRef] [Green Version]
- Dahlen, E.R.; Edwards, B.D.; Tubré, T.; Zyphur, M.J.; Warren, C.R. Taking a look behind the wheel: An investigation into the personality predictors of aggressive driving. Accid. Anal. Prev. 2012, 45, 1–9. [Google Scholar] [CrossRef] [PubMed]
- Wiesenthal, D.L.; Hennessy, D.; Gibson, P.M. The Driving Vengeance Questionnaire (DVQ): The development of a scale to measure deviant drivers’ attitudes. Violence Vict. 2000, 15, 115–136. [Google Scholar] [PubMed]
- De Winter, J.C.F.; Dodou, D. The Driver Behaviour Questionnaire as a predictor of accidents: A meta-analysis. J. Saf. Res. 2010, 41, 463–470. [Google Scholar] [CrossRef] [PubMed]
- Chu, W.; Wu, C.; Zhang, H.; Atombo, C.; Zhang, L. Investigating the Relationship Between Driving Skills, Driving Experience and Aggressive Driving Behaviors in China; No. 17-02727; Transportation Research Board 96th Annual Meeting: Washington, DC, USA, 2017. [Google Scholar]
- Pentland, A.; Liu, A. Modeling and prediction of human behavior. Neural Comput. 1999, 11, 229–242. [Google Scholar] [CrossRef] [PubMed]
- Muñoz, M.; Lee, J.; Reimer, B.; Mehler, B.; Victor, T. Analysis of drivers’ head and eye movement correspondence: Predicting drivers’ glance location using head rotation data. In Proceedings of the 8th International Driving Symposium on Human Factors in Driver Assessment, Training, and Vehicle Design, Snowbird, UT, USA, 22–25 June 2015. [Google Scholar]
- Sodnik, J.; Tomazic, S.; Dicke, C.; Billinghurst, M. Spatial auditory interface for an embedded communication device in a car. In Proceedings of the international first Conference on Advances in Computer-Human Interaction, Sainte Luce, France, 10–15 February 2008; pp. 69–76. [Google Scholar] [CrossRef]
- Kee, S.; Shamsul, B.; Goh, Y. Differences of drivers’ driving performance in simulated driving. Res. J. Appl. Sci. 2009, 4, 230–237. [Google Scholar]
- Bellet, T.; Mayenobe, P.; Bornard, J.C.; Paris, J.C.; Gruyer, D.; Claverie, B. Human driver modelling and simulation into a virtual road environment. In Human Modelling in Assisted Transportation; Springer: Milan, Italy, 2011; pp. 251–262. [Google Scholar]
- Bifulco, G.N.; Galante, F.; Pariota, L.; Russo-Spena, M. Identification of driving behaviors with computer-aided tools. In Proceedings of the 2012 Sixth UKSim/AMSS European Symposium on Computer Modeling and Simulation, Valetta, Malta, 14–16 November 2012; pp. 331–336. [Google Scholar]
- Stojmenova, K.; Jakus, G.; Sodnik, J. Sensitivity evaluation of the visual, tactile, and auditory detection response task method while driving. Traffic Inj. Prev. 2017, 431–436. [Google Scholar] [CrossRef] [PubMed]
- Kun, A.L.; Shyrokov, A.; Heeman, P.A. Interactions between human–human multi-threaded dialogues and driving. Pers. Ubiquitous Comput. 2013, 17, 825–834. [Google Scholar] [CrossRef]
- Strayer, D.L.; Johnston, W.A. Driven to distraction: Dual-task studies of simulated driving and conversing on a cellular telephone. Psychol. Sci. 2001, 12, 462–466. [Google Scholar] [CrossRef] [PubMed]
- Ting, P.H.; Hwang, J.R.; Doong, J.L.; Jeng, M.C. Driver fatigue and highway driving: A simulator study. Physiol. Behav. 2008, 94, 448–453. [Google Scholar] [CrossRef] [PubMed]
- Larue, G.S.; Kim, I.; Rakotonirainy, A.; Haworth, N.L.; Ferreira, L. Driver’s behavioural changes with new intelligent transport system interventions at railway level crossings—A driving simulator study. Accid. Anal. Prev. 2015, 81, 74–85. [Google Scholar] [CrossRef] [PubMed]
- Angkititrakul, P.; Ryuta, T.; Wakita, T.; Takeda, K.; Miyajima, C.; Suzuki, T. Evaluation of driver-behavior models in real-world car-following task. In Proceedings of the 2009 IEEE International Conference on Vehicular Electronics and Safety (ICVES), Pune, India, 11–12 November 2009; pp. 113–118. [Google Scholar]
- Katsis, C.D.; Katertsidis, N.; Ganiatsas, G.; Fotiadis, D.I. Toward emotion recognition in car-racing drivers: A biosignal processing approach. IEEE Trans. Syst. Man Cybern. Part A 2008, 38, 502–512. [Google Scholar] [CrossRef]
- Suryawanshi, S.P.; Somani, S.B.; Shete, V.V. Analysis of Driver’s Skills from Passenger’s Comfort. Int. J. Adv. Res. Comput. Commun. Eng. 2015, 4, 226–229. [Google Scholar]
- Lee, C.F.; Öberg, P. Classification of Road Type and Driving Style Using OBD Data; SAE Technical Paper, No. 2015-01-0979; SAE International: Warrendale, PA, USA, 2015. [Google Scholar] [CrossRef]
- Karatas, C.; Li, H.; Liu, L. Toward detection of unsafe driving with inertial head-mounted sensors. In Proceedings of the Eighth Wireless of the Students, by the Students, and for the Students Workshop; ACM: New York, NY, USA, 2016. [Google Scholar]
- Castignani, G.; Derrmann, T.; Frank, R.; Engel, T. Driver behavior profiling using smartphones: A low-cost platform for driver monitoring. IEEE Intell. Transp. Syst. Mag. 2015, 7, 91–102. [Google Scholar] [CrossRef]
- Johnson, D.A.; Trivedi, M.M. Driving style recognition using a smartphone as a sensor platform. In Proceedings of the 14th International IEEE Conference on Intelligent Transportation Systems (ITSC), Washington, DC, USA, 5–7 October 2011; pp. 1609–1615. [Google Scholar]
- Castignani, G.; Derrmann, T.; Frank, R.; Engel, T. Smartphone-Based Adaptive Driving Maneuver Detection: A Large-Scale Evaluation Study. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2230–2339. [Google Scholar] [CrossRef]
- You, C.W.; Montes-de-Oca, M.; Bao, T.J.; Lane, N.D.; Lu, H.; Cardone, G.; Campbell, A.T. CarSafe: A driver safety app that detects dangerous driving behavior using dual-cameras on smartphones. In Proceedings of the 2012 ACM Conference on Ubiquitous Computing; ACM: New York, NY, USA, 2012; pp. 671–672. [Google Scholar]
- Polders, E.; Cornu, J.; De Ceunynck, T.; Daniels, S.; Brijs, K.; Brijs, T.; Wets, G. Drivers’ behavioral responses to combined speed and red light cameras. Accid. Anal. Prev. 2015, 81, 153–166. [Google Scholar] [CrossRef] [PubMed]
- Igarashi, K.; Miyajima, C.; Itou, K.; Takeda, K.; Itakura, F.; Abut, H. Biometric identification using driving behavioral signals. In Proceedings of the 2004 IEEE International Conference on Multimedia and Expo (ICME’04), Taipei, Taiwan, 27–30 June 2004; Volume 1, pp. 65–68. [Google Scholar]
- Sysoev, M.; Kos, A.; Pogačnik, M. Noninvasive stress recognition considering the current activity. Pers. Ubiquitous Comput. 2015, 19, 1045–1052. [Google Scholar] [CrossRef]
- Bauer, G.; Lukowicz, P. Can smartphones detect stress-related changes in the behaviour of individuals? In Proceedings of the 2012 IEEE International Conference on Pervasive Computing and Communications Workshops (PERCOM Workshops), Lugano, Switzerland, 19–23 March 2012; pp. 423–426. [Google Scholar]
- Bogomolov, A.; Lepri, B.; Ferron, M.; Pianesi, F.; Pentland, A.S. Pervasive stress recognition for sustainable living. In Proceedings of the 2014 IEEE International Conference on Pervasive Computing and Communications Workshops (PERCOM Workshops), Budapest, Hungary, 24–28 March 2014; pp. 345–350. [Google Scholar]
- Wang, R.; Chen, F.; Chen, Z.; Li, T.; Harari, G.; Tignor, S.; Campbell, A.T. StudentLife: Assessing mental health, academic performance and behavioral trends of college students using smartphones. In Proceedings of the 2014 ACM International Joint Conference on Pervasive and Ubiquitous Computing; ACM: New York, NY, USA, 2014; pp. 3–14. [Google Scholar]
- Healey, J.A.; Picard, R.W. Detecting stress during real-world driving tasks using physiological sensors. IEEE Trans. Intell. Transp. Syst. 2005, 6, 156–166. [Google Scholar] [CrossRef]
- Rigas, G.; Goletsis, Y.; Fotiadis, D.I. Real-time driver’s stress event detection. IEEE Trans. Intell. Transp. Syst. 2012, 13, 221–234. [Google Scholar] [CrossRef]
- Wang, S.; Zhang, Y.; Wu, C.; Darvas, F.; Chaovalitwongse, W.A. Online prediction of driver distraction based on brain activity patterns. IEEE Trans. Intell. Transp. Syst. 2015, 16, 136–150. [Google Scholar] [CrossRef]
- Rongben, W.; Lie, G.; Bingliang, T.; Lisheng, J. Monitoring mouth movement for driver fatigue or distraction with one camera. In Proceedings of the IEEE 7th International IEEE Conference on Intelligent Transportation Systems, Washington, DC, USA, 3–6 October 2004; pp. 314–319. [Google Scholar]
- Qi, H.; Wang, Z.J.; Miao, C. Non-contact driver cardiac physiological monitoring using video data. In Proceedings of the 2015 IEEE China Summit and International Conference on Signal and Information Processing (ChinaSIP), Chengdu, China, 12–15 July 2015; pp. 418–422. [Google Scholar]
- Zhang, L.; Liu, F.; Tang, J. Real-time system for driver fatigue detection by RGB-D camera. ACM Trans. Intell. Syst. Technol. (TIST) 2015, 6, 22. [Google Scholar] [CrossRef]
- Bergasa, L.M.; Nuevo, J.; Sotelo, M.A.; Barea, R.; Lopez, M.E. Real-time system for monitoring driver vigilance. IEEE Trans. Intell. Transp. Syst. 2006, 7, 63–77. [Google Scholar] [CrossRef]
- Kim, S.; Chun, J.; Dey, A.K. Sensors know when to interrupt you in the car: Detecting driver interruptibility through monitoring of peripheral interactions. In Proceedings of the 33rd Annual ACM Conference on Human Factors in Computing Systems; ACM: New York, NY, USA, 2015; pp. 487–496. [Google Scholar]
- SelfLoops application. Available online: https://www.selfloops.com/products/heart-rate-variability.html (accessed on 21 August 2017).
- Kang, M.G.; Koh, S.B.; Cha, B.S.; Park, J.K.; Woo, J.M.; Chang, S.J. Association between job stress on heart rate variability and metabolic syndrome in shipyard male workers. Yonsei Med. J. 2004, 45, 838–846. [Google Scholar] [CrossRef] [PubMed]
- Shlyk, N.I. The Heart Rate and Regulation Type of Children, Teenagers and Sportsmen; Publishing House Udmurt State University: Izhevsk, Russia, 2009. [Google Scholar]
- Camm, A.J.; Malik, M.; Bigger, J.T.; Breithardt, G.; Cerutti, S.; Cohen, R.J.; Lombardi, F. Heart rate variability. Standards of measurement, physiological interpretation, and clinical use. Eur. Heart J. 1996, 17, 354–381. [Google Scholar]
- QMedical. The ANS/HRV and Stress Relationship. Available online: http://www.qmedical.com/dt_hrv_stress_relationship.htm (accessed on 21 August 2017).
- Nussinovitch, U.; Cohen, O.; Kaminer, K.; Ilani, J.; Nussinovitch, N. Evaluating reliability of ultra-short ECG indices of heart rate variability in diabetes mellitus patients. J. Diabetes Its Complic. 2012, 26, 450–453. [Google Scholar] [CrossRef] [PubMed]
- Mila-Kierzenkowska, C.; Jurecka, A.; Woźniak, A.; Szpinda, M.; Augustyńska, B.; Woźniak, B. The effect of submaximal exercise preceded by single whole-body cryotherapy on the markers of oxidative stress and inflammation in blood of volleyball players. Oxidative Med. Cell. Longev. 2013, 2013, 409567. [Google Scholar] [CrossRef] [PubMed]
- Stahl, B.; Thoshkahna, B. Design and evaluation of the effectiveness of a sonification technique for real time heart-rate data. J. Multimodal User Interfaces 2016, 10, 207–219. [Google Scholar] [CrossRef]
- Hwang, S.; Seo, J.; Jebelli, H.; Lee, S. Feasibility analysis of heart rate monitoring of construction workers using a photoplethysmography (PPG) sensor embedded in a wristband-type activity tracker. Autom. Constr. 2016, 71, 372–381. [Google Scholar] [CrossRef]
- Hoogendoorn, R.G.; Tamminga, G.; Hoogendoorn, S.P.; Daamen, W. Longitudinal driving behavior under adverse weather conditions: Adaptation effects, model performance and freeway capacity in case of fog. In Proceedings of the 2010 13th International IEEE Conference on Intelligent Transportation Systems (ITSC), Funchal, Portugal, 19–22 September 2010; pp. 450–455. [Google Scholar]
- Sysoev, M.; Kos, A.; Pogačnik, M. Smart Driving: Influence of Context and Behavioral Data on Driving Style. In Proceedings of the International Conference on Next Generation Wired/Wireless Networking; Springer International Publishing: St. Petersburg, Russia, 2016; pp. 141–151. [Google Scholar] [CrossRef]
- Aljaafreh, A.; Alshabatat, N.; Al-Din, M.S.N. Driving style recognition using fuzzy logic. In Proceedings of the 2012 IEEE International Conference on Vehicular Electronics and Safety (ICVES), Istanbul, Turkey, 24–27 July 2012; pp. 460–463. [Google Scholar]
- Kim, E.; Choi, E. Estimates of critical values of aggressive acceleration from a viewpoint of fuel consumption and emissions. In Proceedings of the 2013 Transportation Research Board Annual Meeting, Washington, DC, USA, 13–17 January 2013. [Google Scholar]
- Kotsiantis, S.B.; Zaharakis, I.D.; Pintelas, P.E. Machine learning: A review of classification and combining techniques. In Artificial Intelligence Review; Springer International Publishing: Dordrecht, The Netherlands, 2006; Volume 26, pp. 159–190. [Google Scholar]








© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sysoev, M.; Kos, A.; Guna, J.; Pogačnik, M. Estimation of the Driving Style Based on the Users’ Activity and Environment Influence. Sensors 2017, 17, 2404. https://doi.org/10.3390/s17102404
Sysoev M, Kos A, Guna J, Pogačnik M. Estimation of the Driving Style Based on the Users’ Activity and Environment Influence. Sensors. 2017; 17(10):2404. https://doi.org/10.3390/s17102404
Chicago/Turabian StyleSysoev, Mikhail, Andrej Kos, Jože Guna, and Matevž Pogačnik. 2017. "Estimation of the Driving Style Based on the Users’ Activity and Environment Influence" Sensors 17, no. 10: 2404. https://doi.org/10.3390/s17102404
APA StyleSysoev, M., Kos, A., Guna, J., & Pogačnik, M. (2017). Estimation of the Driving Style Based on the Users’ Activity and Environment Influence. Sensors, 17(10), 2404. https://doi.org/10.3390/s17102404