This section details the design process followed to generate a set of super-structured FBG (SSFBG) sensors encoded in amplitude and phase. In this way, a technical formulation of the proposed devices is provided, as well as the considerations taken into account to achieve the wavelength interrogation of each sensing element in the network.
There are two important factors in the proposed sensing system; the first one is the design of orthogonal codewords, composed of amplitude and phase terms, that allows a set of neighboring sensors to overlap in the spectrum, and the second one is the proper interrogation of the SSFBG devices to obtain the complete information from the sensing network. These two factors are closely related so it is necessary to conceive the whole sensing system to propose a feasible encoding scheme for the proposed SSFBG sensors.
2.1. Design
The super-structured FBG devices are designed as a set of reflection sub-bands equi-spaced in wavelength. The sub-band sets that comprise an SSFBG are written at once in the same location along the optical fiber. Therefore, the entire SSFBG device responds to environmental changes uniformly, i.e., all the sub-bands are wavelength-shifted to the same extent . Each one of the sub-bands comprising the SSFBG device is manufactured according to the amplitude and phase codewords.
Encoding sensors in amplitude is somewhat straightforward: a binary codeword can be translated into the design of a super-structured FBG sensor by activating/deactivating each reflection sub-band depending on a corresponding bit value (‘1’ or ‘0’). Take for example a codeword composed of five bits [0 1 0 0 1]. This codeword would be translated to a SSFBG device composed of five equidistant wavelength slots featuring reflection sub-bands only in the second and fifth positions (corresponding with the 1’s in the codeword). Phase information can also be assigned to each active sub-band, i.e., each reflection sub-band is able to phase-shift the reflected waves by a fixed value, with the property that the relative phase between two consecutive sub-bands is fixed to a discrete value (e.g., ‘0’, ‘’). Given that the phase relationship is preserved between consecutive sub-bands in each sensing device, the interrogation method should measure the differential optical phase along the sensing network.
A feasible way to measure the phase information encoded into the sensors in a scanning fashion (common to interrogation methods) is through comparison of the phase value between two adjacent sub-bands, obtaining the relative phase-shift through comparison to a local oscillator. This is the reason why single-sideband (SSB) modulation of the source is performed, obtaining a tunable dual-wavelength source interrogation system. The key of this interrogation scheme is that the dual-wavelength source separation matches the distance between sub-bands in the sensing device, so that the relative phase between two adjacent sub-bands in the sensing network can be measured. This makes it possible to distinguish whether or not two adjacent sub-bands introduce a phase shift.
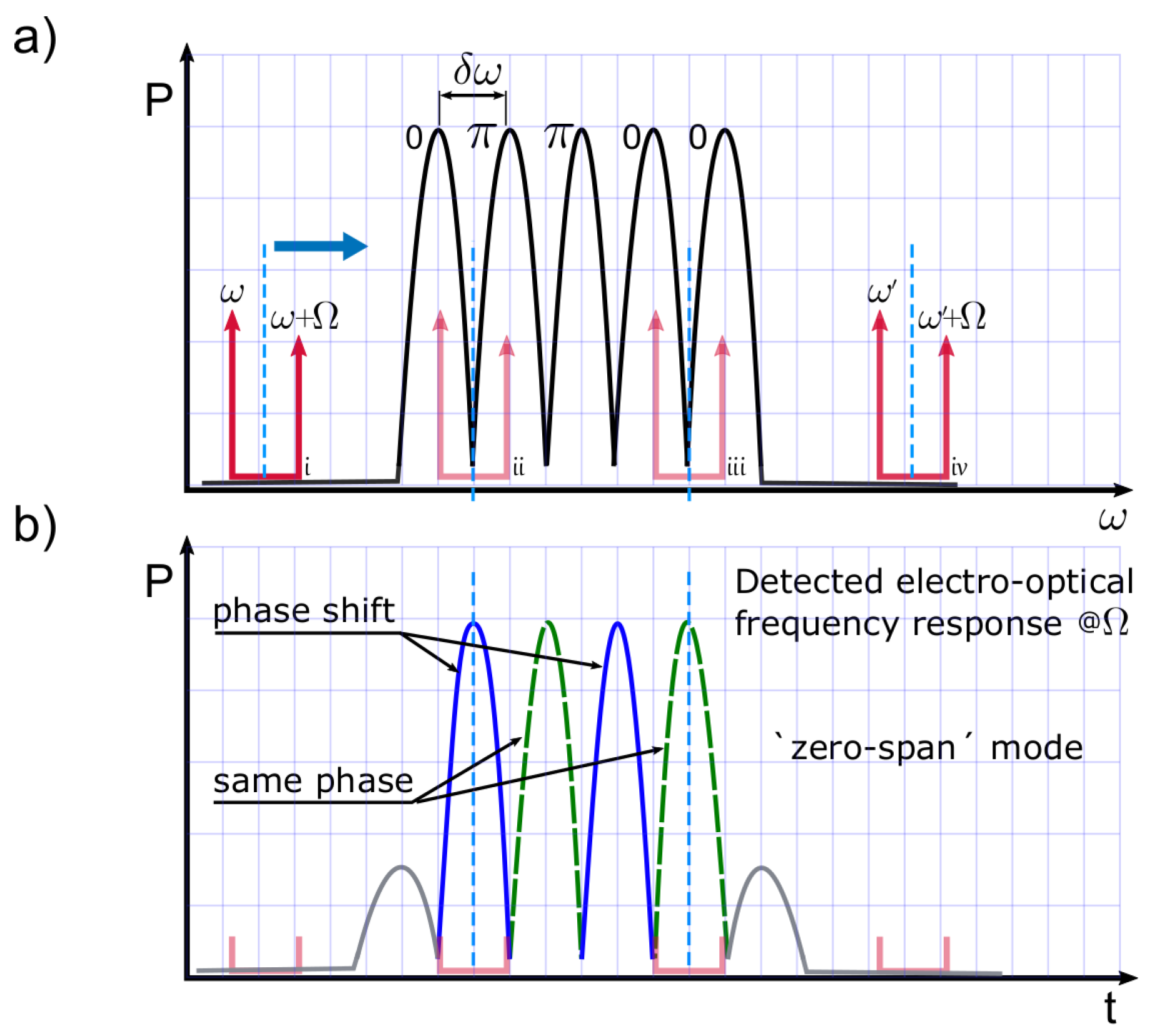
Figure 1 exemplifies a SSFBG device and shows the operating principle for its interrogation.
Figure 1a, represents the scanning of the dual-wavelength source over a super-structured FBG device with five active reflection sub-bands
. Let us consider that their optical phase values correspond with the following codeword:
. The spectral spacing between sub-bands (
) is fixed to match the spectral distance
between the two tones of the tunable dual-wavelength source used to interrogate the sensors. In addition,
Figure 1b shows the expected amplitude and phase values of the radiofrequency-detected signal at
, after photo-detection of the interaction between the dual-wavelength source and the sensing device (as exemplified in
Figure 1a). The scanning interrogation method produces a
interrogated sub-band for each consecutive pair of sub-bands in the actual SSFBG device, with a relative phase value depending on the phase relationship between sub-bands in the original device. The interrogation process is depicted in
Figure 1a in four stages: stages i and iv represent the starting and ending points of the scan, respectively, while stages ii and iii represent two detection possibilities: differential phase shift of
, or no phase change at all, respectively.
From the establishment of super-structured FBG sensors and their interrogation methodology discussed above, we move now to describe the design of mutually orthogonal super-structured FBG sensors.
The first consideration to get into the design of the SSFBG sensors has to do with the practical parameters needed to manufacture the devices. Each SSFBG sensor shape in the network is established by a number of parameters that can be optimized either to facilitate their detection or to adapt the sensors behavior to the network characteristics (e.g., network topology could require higher/lower reflectivity values). The main descriptor parameters in our SSFBG sensors are of course the amplitude and phase codewords that define sub-band distribution. Still, other important design parameters are the spacing between slots
(which is related with the frequency spacing of 10 GHz by
) and the sub-band linewidth
, as described in Equation (
1) for a set of
K encoded SSFBG sensors.
where the
kth sensor is described not only in terms of the number of sub-bands
N and the codewords
and
, specifying each sub-band binary amplitude
and phase value
, but also some practical parameters are included:
is the reflectivity of each sensor;
is the spectral spacing between the slots; each sub-band linewidth
is determined by its the full width half maximum (
) value; and
represents the induced wavelength shift. The sub-band shape was chosen as Gaussian for simplicity but, any other realizable shape is compatible with the encoding proposal.
In order to obtain a set of sensors mutually orthogonal with each other we take some concepts from optical orthogonal codes (OOC), which are binary codewords used in optical code division multiple access (OCDMA) communication systems; in our previous work, OOCs were used to shape the amplitude pattern of a SSFBG device. Here, we use the same concept with the addition of phase encoding to the reflecting sub-bands. This is represented in Equation (
1), by the inclusion (or not) of the phase term
to the active sub-bands. An important practical requirement is that at least two consecutive active sub-bands are necessary in order to establish the phase difference between them in the interrogation stage. The effect achieved by adding phase encoding to the sensors can be seen as a new dimension in amplitude encoding, going from binary (
) to ternary encoding since a sign is added (
).
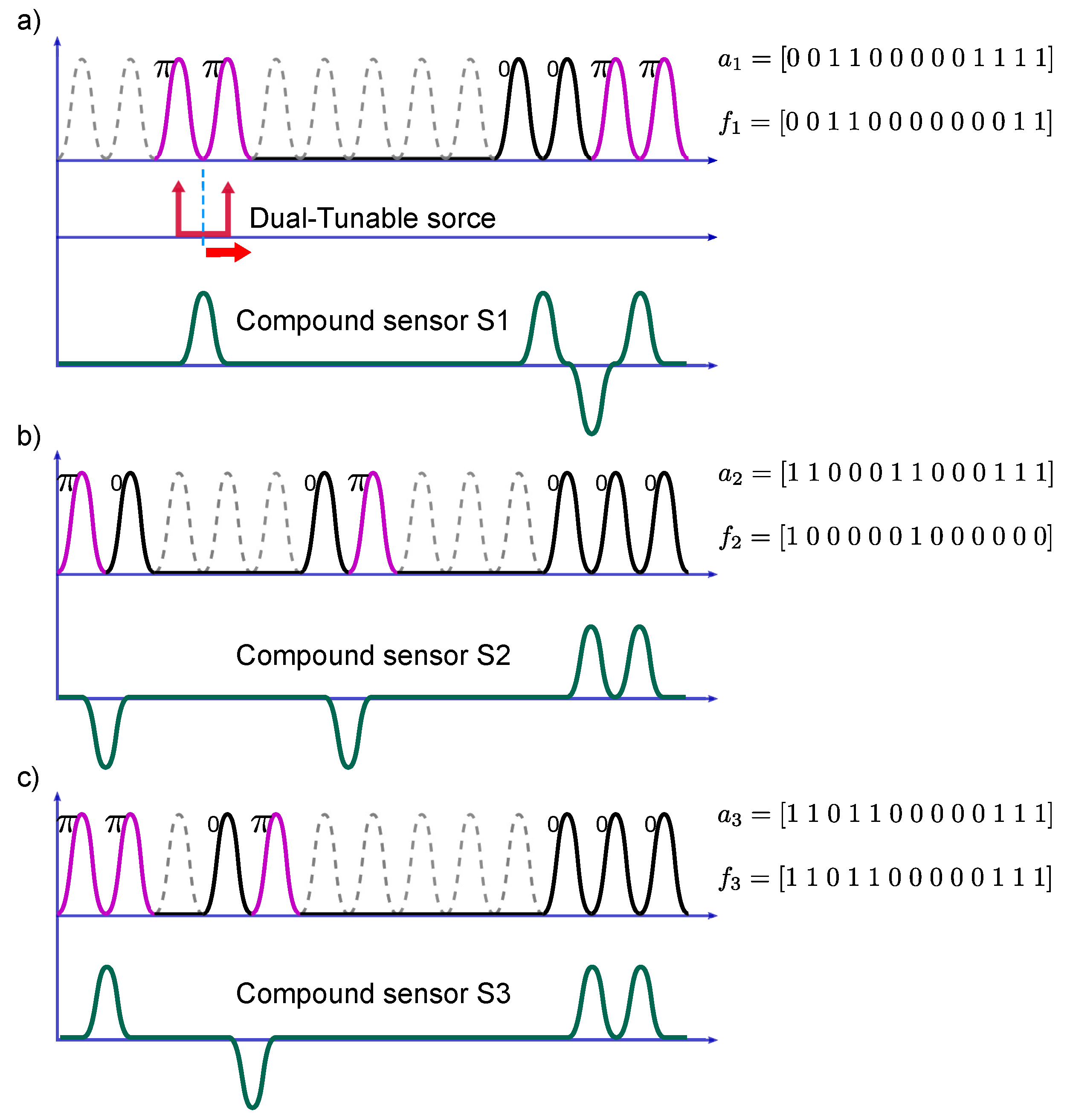
A set of three amplitude and phase codewords is selected as exemplified in
Table 1; these codewords are interpreted in increasing wavelength as described in Equation (
1) and have a bit length of 13 positions, meaning that each SSFBG device features 13 slots to allocate the respective reflection sub-bands according to the codewords
. However, due to the dual-wavelength interrogation principle, the retrieved information from each sensor consists of 12 sub-bands. For example, the first sensor (S1) is constructed by the codewords
in amplitude, and
in phase. Hence, it is composed of six sub-bands corresponding to the 1’s in the amplitude codeword
. In turn, the phase value for each sub-band is determined by the codeword
, that enables the factor
at the nonzero bit positions.
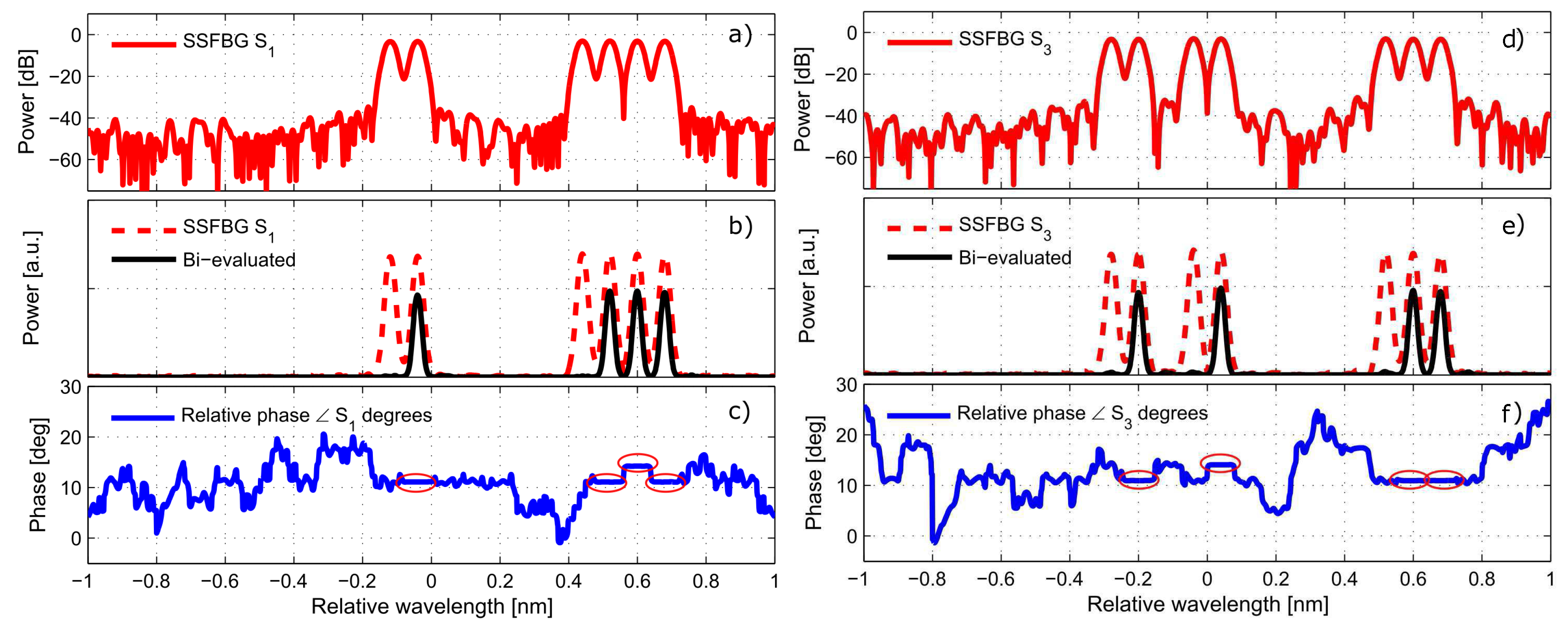
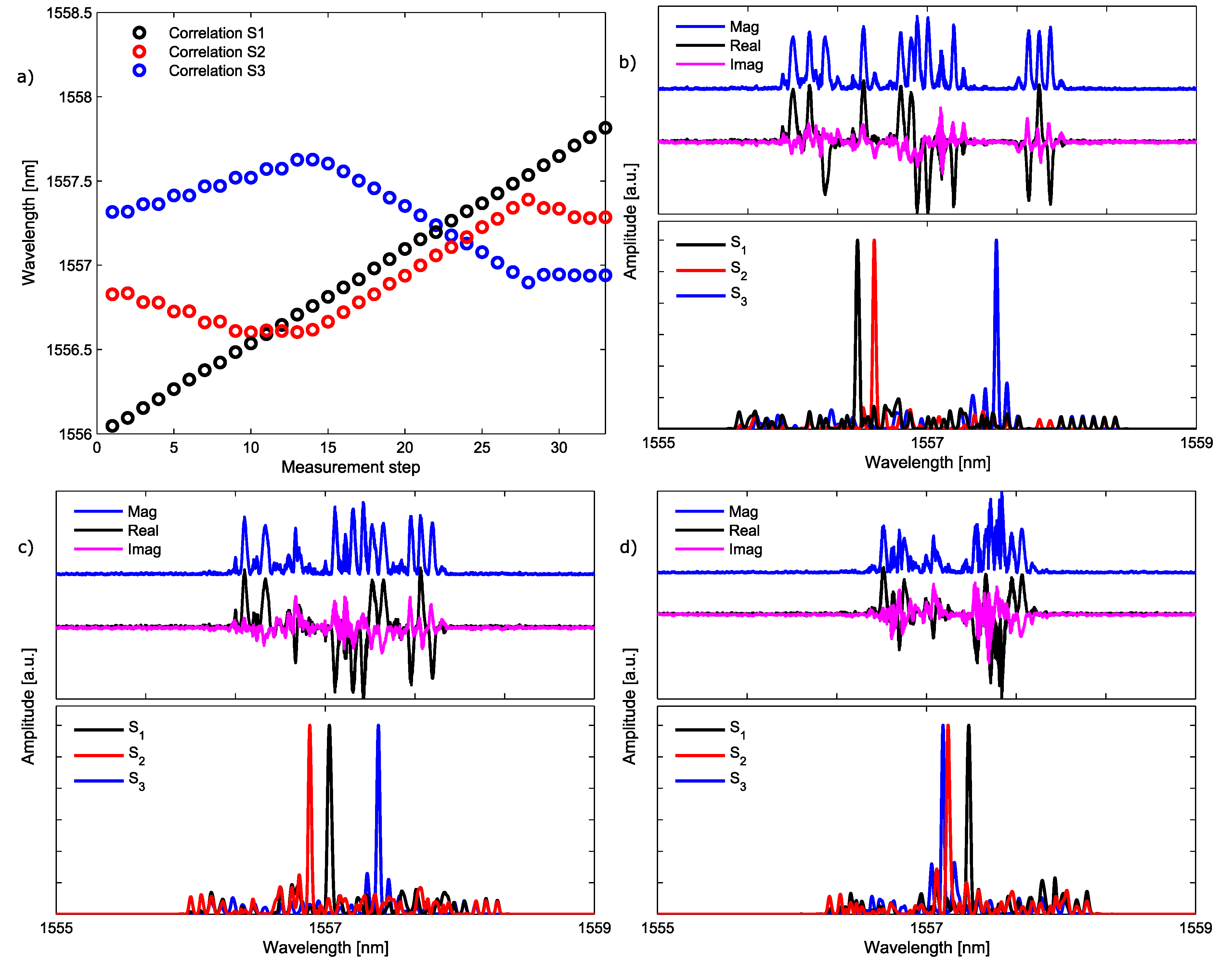
Figure 2a–c depicts the equivalent sub-band distribution for the set of sensors in
Table 1, as well as their compound interrogated signal. A change of phase between consecutive sub-bands is translated to a negative sign in the detected shape, likewise, two adjacent sub-bands without a phase change produce a detected signal with positive sign.
2.2. Interrogation
The interrogation method was described briefly in the
Section 2.1. Now, we will detail this process from the theoretical perspective. To do so, it is necessary to define the source used to illuminate the sensors, and formulate its interaction with the sensing array. The dual-wavelength source is given by Equation (
2).
where
and
are the general expressions for the two optical angular frequencies, and
represent each tone amplitude. These parameters depend on the modulation scheme used: with right-
modulation at a microwave frequency
for example, we get
,
and
. As a result, the interrogating signal
is composed of two tones (
in Equation (
2)) separated in frequency by
.
is swept over the sensors operational range and reflected by the sensing elements in the network. The term
in Equation (
2) describes the random variations in the optical phase of the CW source; this parameter is considered the same in the two tones because they are obtained through SSB modulation of the original source. Here, we are going to consider the full overlapping scenario between two neighboring sensors. This scheme is adequate to analyze the behavior of the network and can be extended to larger sensing networks. So, using a photo-detector to collect the reflected light from the sensing network, the gathered signal (
) would be written as in Equation (
3):
where
is the amplitude and phase response of the
kth sensor in the lower sub-band
. In the same way, the term
corresponds to the upper sub-band
. Notice that the second sensor in the network gets delayed by
regarding sensor 1, due to the difference between their fiber paths.
In a ‘square-law’ detector, the detected photocurrent is proportional to:
So, from Equations (
3) and (
4) the expected beating terms in the photodetector are listed in Equations (5)–(7).
First, we have the beating terms falling in the baseband region; these are represented in Equation set (5)
Then, we will call
direct terms to those terms created by the two interrogating bands being reflected from a unique sensor, they are expressed in Equation set (6).
On the other hand, the terms proceeding from two different sensors beating the two wavelengths are called the
cross terms; they are represented in Equation set (7).
In order to develop the
direct and
cross terms, we need to compute the different products (
) from Equations (6) and (7). It is important to note that the
direct and
cross terms oscillate at the fixed microwave frequency value
. The frequency response of the sensing network is then measured as the electro-optical frequency response at the modulation frequency (
). Hence, the detected photocurrent related to
direct and
cross terms is obtained as expressed in Equation set (8).
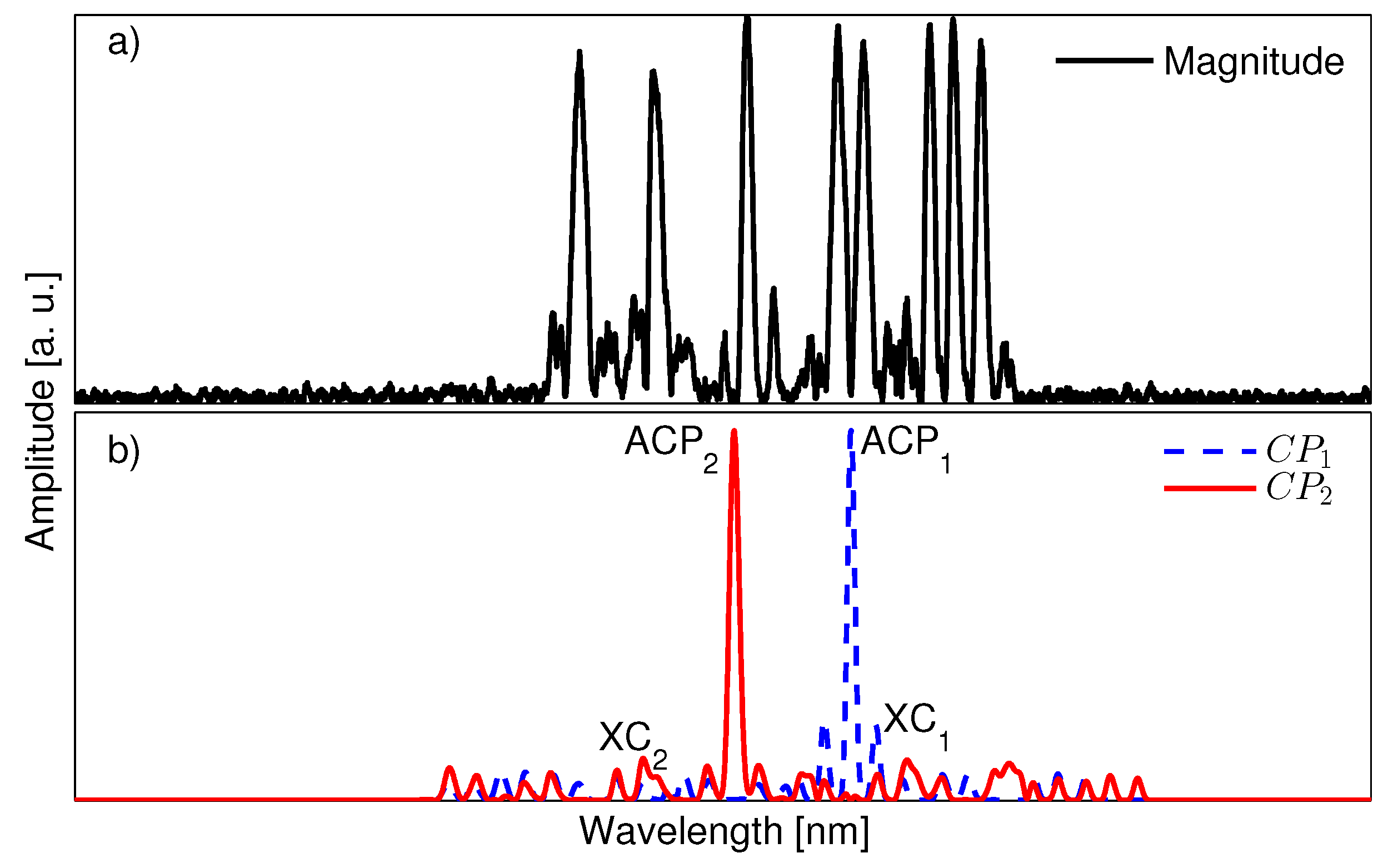
Terms in Equation (8) represent the interaction between the dual-wavelength source and the sensing network for two generic wavelengths and . We can conclude that direct terms, in Equation (8a,b), are present at the frequency , and are affected by the phase of a unique sensing device. On the other hand, while cross terms, , are present at the same frequency and affected by the phase component of the different sensors (). They have two additional terms causing a phase delay: () is the phase noise inherent to the laser source, and () describes the interferometric phenomenon caused by the cavity formed between two overlapping sub-bands. The effect of these terms on the sensors measurement is addressed in the next section.
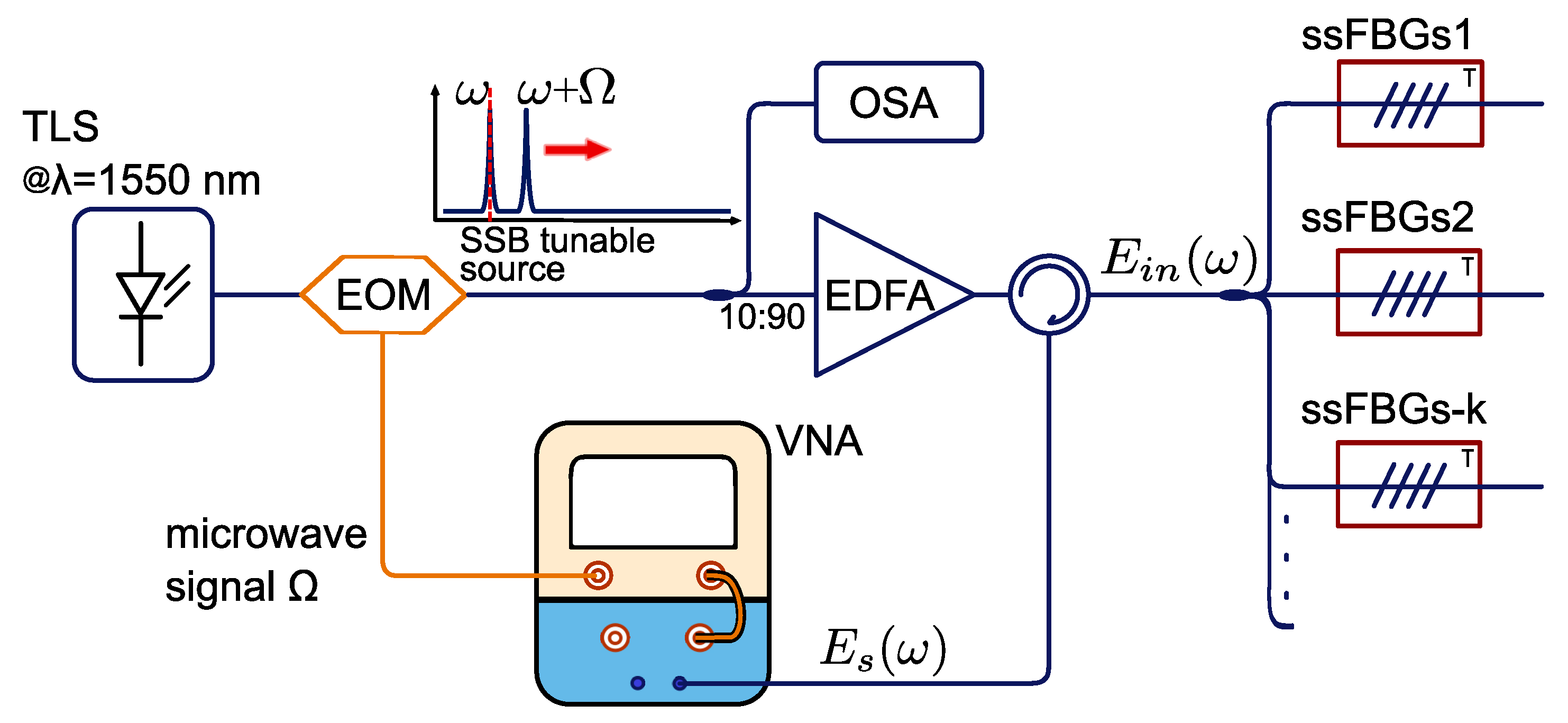
The interrogation method to retrieve the phase and amplitude response from the sensors (see
Figure 3) is performed by means of a vectorial network analyzer (VNA), which is used to measure the sensing network scattering parameter
at a fixed microwave frequency (
). In this way, the complete electro-optical frequency response from the system
is obtained at the modulation frequency. This is known as a ‘zero-span’ mode measurement, meaning that the power of the sensing network frequency response is displayed versus time, at the fixed frequency. When we set this frequency to be
, the network frequency response is determined by the
direct and
cross terms, which are determined by the phase relationship between adjacent sub-bands of the K sensors present in the network (
).













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}