1. Introduction
The centralized state estimation method for multiple-target tracking with multiple sensors can integrate detecting information from different sensors according to certain rules, which will make the tracking results more accurate than that of a single sensor [
1,
2,
3]. Multi-sensor fusion is an important data processing method in the field of target tracking, especially under nonlinear conditions, and the fused result with multiple sensors is often better for multiple-target tracking, which has been widely concerned by scholars both at home and abroad [
3,
4,
5,
6,
7,
8,
9,
10,
11,
12].
The state-of-the-art techniques for multiple-target tracking mainly contains two categories. The first category is the tracking method based on a random finite set; the other is the method based on measurement to track association. The former method can directly track multiple targets without associating the detected measurements with the tracks in the surveillance area. However, this kind of method faces complex integral operations, which are often difficult to find an exact solution. Although approximation methods have been a good choice for this problem, the computational cost is too great, and improper approximation will lead to degradation of the tracking accuracy, thus making it a long way from being extensively utilized in practical applications [
4]. The latter method has been widely applied in various tracking systems, and is still the most common method for centralized tracking [
5,
6,
7,
8,
9,
10,
11,
12,
13,
14].
In the second category, the sequential multi-sensor joint probabilistic data association algorithm (MSJPDA) is a classical and effective method for multi-sensor tracking, which achieves better tracking performance compared with its parallel counterparts [
10,
11]. Unfortunately, current MSJPDA algorithms are often proposed to solve association problems under linear circumstances, and the nonlinear environment is seldom involved in the literature. As is known, the nonlinear equation can be linearized according to Taylor expansion, then a MSJPDA algorithm based on the extended Kalman filter (EKF), the so called MSJPDA-EKF is derived [
12,
13,
14]. However, it is essential for MSJPDA-EKF to calculate the Jacobian matrix in the linearization step in each iteration, and the ignorance of higher orders may introduce large linearization errors, which may result in degraded performance, and even divergence [
1,
2,
14]. In addition, the estimated state will affect the calculation of association probability in the next iteration, thus causing changes in the computation of weights of joint events, which may eventually makes false correlations, and even lead to divergence [
15]. To conquer the shortcomings of MSJPDA-EKF, the MSJPDA algorithm based on the unscented Kalman filter (MSJPDA-UKF) is proposed. MSJPDA-UKF can acquire higher estimation accuracy than MSJPDA-EKF, and is relatively more stable [
16]. However, reasonable adjustments are needed in MSJPDA-UKF to achieve the ideal performance, and a numerical instability phenomenon is easy to occur in the situation of high dimensional estimation [
16,
17,
18].
To address the high dimensional nonlinear estimation problem, the cubature Kalman filter (CKF) based on the third-degree spherical-radial cubature rule has been recently proposed [
19,
20,
21,
22,
23,
24,
25]. In the procedure of CKF, a certain number of typical cubature points are selected to approximate the posterior probability, then the mean and covariance are captured through a nonlinear transfer function to achieve accurate estimation of the target state [
19]. CKF and UKF are both moment-matching filters which deterministically select a set of weighted sample points to approximate the posterior probability density. Compared with EKF, CKF and UKF do not have to calculate the Jacobian matrix in each iteration, thereby reducing the computational cost. At the same time, they both avoid the negative influence of the truncation error in the process of nonlinear state estimation, which is particularly effective in the case of state estimation with strong nonlinearity [
19,
21,
22,
23]. In UKF, to achieve a better estimation performance, the adjustment of the scaling parameter is an essential step, as different scaling parameters may yield completely distinct estimation results. The selection of the scaling parameter is of great significance to the performance of UKF in some sense [
16,
19,
21,
25]. However, there is no parameter to be adjusted for CKF, and the selected sampling points and weights are only related to the dimension of the target state, which can be calculated in advance to reduce the computational complexity. Furthermore, CKF is more accurate with respect to high dimensional estimation, and easy for design and implementation [
19,
21,
22,
23,
24]. Especially in the case of high dimension, EKF and UKF suffer from the curse of dimensionality or divergence, or both, but CKF still performs well [
19,
21,
25]. Unfortunately, in practice, arithmetic operations performed on finite word-length digital computers may introduce large errors; then the symmetry and positive definiteness of the covariance are often not satisfied. Moreover, perhaps the loss of positive definiteness is more perilous as it terminates the running of the CKF. Then, the square root version of CKF, the so called SRCKF is proposed to address this problem [
19,
21,
23,
24]. In SRCKF, only the square root factors are propagated during the iterations. Therefore, the square rooting operations of the matrix are avoided, thus reducing the computation cost. The symmetry and positive definiteness of the covariance are preserved, and the numerical accuracy is also improved [
19,
21,
25].
In this paper, to deal with the target tracking problem in a nonlinear system under a cluttered environment, a novel centralized multi-sensor square root cubature joint probabilistic data association algorithm (CMSCJPDA) is proposed. In CMSCJPDA, measurements of each single sensor are sequentially processed to compute the association probabilities based on the similar rules in JPDA, then SRCKF and the validated measurements are chosen to estimate the state of targets according to weighed state fusion. Eventually, the accurate estimation of multiple targets’ states with multiple sensors is accomplished.
The rest of this paper is organized as follows:
Section 2 describes the problem of tracking multiple targets with multiple sensors. Then, in
Section 3, a simple overview of the numerical integral approximation method based on spherical-radial principle is introduced. The main idea of CMSCJPDA is detailed in
Section 4, and an algorithm flow is given. The numerical experiments are designed in
Section 5, and the comparison and analysis of CMSCJPDA against several existing methods is also presented in this section. Concluding remarks of this paper and future work are given in
Section 6.
2. Problem Formulation
Consider sensors are applied to track
targets in a cluttered environment. For arbitrary target
t ,
denotes the state of target
t at discrete time instant
k. For brevity, without the control input term, the discrete-time state equation of a nonlinear system is:
where
k is the discrete time instant,
is a known nonlinear function, and
is independent zero-mean Gaussian process noise with covariance:
where
is the Kronecker delta function.
The measurement equation of sensor
i for target
t is:
where
represents the label of sensors.
is the measurement vector of sensor
i for target
t at time instant
k.
represents a known nonlinear function.
is the zero-mean, independent of process noise in Equation (3) and independent from sensor to sensor, with covariance:
4. Centralized Multi-Sensor Square Root Cubature Joint Probabilistic Data Association
In CMSCJPDA, measurements of each sensor are processed in sequence, then the multi-sensor multi-target tracking problem can be reduced to several single-sensor multi-target tracking problems, which are easier to solve.
Assume there are
validated measurements for target
t obtained by sensor
i at time instant
k.
is the label of validated measurements from sensor
,
represents the
jth measurements in the validated region. Especially,
indicates that there is no measurement in the validated region.
represents the
th validated measurement,
represents the predicted measurement, which will be discussed in detail later.
represents the association probability that the measurement
originated from target
t,
is the filtering gain. The state estimate and the corresponding error covariance after processing the measurements of the
ith sensor are denoted by
and
, respectively.
and
represent the initial estimation, and
and
represent the final estimation at time instant
k, respectively. Then, the state update is as follows:
where:
Then, the update of the error covariance is:
Note that the key point for nonlinear single sensor multi-target tracking problem is to compute the association probability
and nonlinear state estimation
. JPDA is thought to be an effective method for multiple targets tracking with single sensor, so we choose JPDA to compute
here. The remaining problem is to obtain
. Although CKF is a good method to deal with the nonlinear state estimation problem, it is easily influenced by limited computer word-length and numerical errors, which may lead to loss of positive definiteness and symmetry of the error covariance matrix [
19,
21,
22,
23,
24]. The effective way to preserve both properties and improve the numerical stability is to design a square root version of the CKF. Despite the fact that the square root cubature Kalman filter (SRCKF) is reformulated to propagate the square roots of the covariance matrices, both CKF and SRCKF are algebraically equivalent to each other, the interested reader is referred to [
19]. In the proposed method, we choose SRCKF to update the state of the targets after the correlation step.
4.1. Computation of Association Probabilities
The probability
that measurement
li originated from target
t can be calculated by summing over all feasible events for which it is true [
1]:
where
is the number of joint events,
denotes the event
m, and
is the following binary element.
represents the posterior probability of event
m, which can be computed by Equation (24):
where
C is a constant,
is the total number of false measurements in event
m.
V is the volume of the entire surveillance region, and
is the detection probability of target
t. The target detection indicator
is defined as:
which indicates whether any measurement is correlated with target
t in event
m. In the same way, it is also easy to define measurement association indicator:
which indicates whether measurement
is correlated with a target in event
m.
is a conditional probability density function under Gaussian assumption, i.e.:
4.2. State Update
During the update of state, the data processing in first sensor is a little different from that in other sensors. Firstly, the specific procedures for the state update in sensors with label are as follows:
Step 1: Calculate the cubature points (
j = 1, 2, …, 2
nx):
where
nx is the dimension of the state.
is the square root factor of
, i.e.:
Equations (28) and (29) indicate that the estimated state and error covariance of the previous sensor are regarded as the predicted state and error covariance of the next sensor, which is the greatest difference of the sensors with label compared with the first sensor with label in the process of state estimation. That is to say, the time update is not needed in sensors with label , and the estimation of the previous sensor is used as the prediction of the next sensor.
Step 2: Evaluate the prediction of cubature points:
Step 3: Estimate the prediction of the corresponding measurement:
Step 4: Estimate the square-root of the innovation covariance:
where
is a lower triangular matrix.
denotes a square root factor of
that
, and the weighed, centred matrix:
Note that denotes the QR decomposition, where is a lower triangular matrix. The relationship of matrices and is as follows: Let be an upper triangular matrix obtained from the QR decomposition on . Then, the lower triangular matrix is obtained as .
Step 5: Estimate the cross-covariance matrix:
where:
Step 6: Estimate the filter gain:
Step 7: Update the nonlinear state:
Equations (28)–(38) give a solution to the estimation of the target state and error covariance at time instant k with sensor label .
Now the estimation problem in the first sensor with label
is considered, the process of the measurement update is the same as that in sensors with label
, but the time update is quite different. In the sensor with label
, the estimation of prediction of the state and error covariance is essential. The current cubature points are:
The propagated cubature points are:
Then the predicted state is:
and the predicted error covariance is:
Equations (39)–(42) describe the time update in the first sensor with label . With the measurement update process composed of Equations (28)–(38) applied, the estimated state and error covariance can be achieved respectively after the data of the first sensor is processed.
To state the proposed method more clearly, the algorithm flow of CMSCJPDA is illustrated in
Table 1.
5. Numerical Experiments
In this section, the numerical results and the effectiveness of the proposed CMSCJPDA algorithm are discussed in two simulation scenarios: crossing target tracking and maneuvering target tracking. The performance of CMSCJPDA is compared with MSJPDA-EKF and MSJPDA-UKF in two scenarios.
For a fair comparison, we make 50 independent Monte Carlo runs. In each run, the measurement noises are generated independently, and the corresponding noisy position measurements are used to initialize the estimate, which guarantees consistency of the initialization of the filter and makes the final estimate unbiased. Except for the initialization, the process of each Monte Carlo run is the same, and the mean value of 50 runs is considered as the final result. The total number of steps per run is 100. is the sampling interval. The nonparametric model is used for the probability mass function (PMF) of the number of false measurements. The expected number of false measurements in the validation gate is . The detection probabilities of all targets are assumed to be . The probability mass is assumed to be . Due to the large initial error, we display the numerical results after the tenth step for clarity.
Targets in the surveillance area are observed by three two-dimensional sensors. The measurement equation of sensor
is:
where
is the sensor label.
is the true state of the targets,
is the position of sensor
i. Other parameters of the sensors are set as shown in
Table 2.
Performance metrics: To compare the tracking performance of different algorithms, the root mean square error (RMSE) is chosen as the metric. The root mean square position error of target
t at time instant
k is defined as:
where
is the total number of Monte Carlo simulations.
and
are true and estimated positions of target
t in the
x direction in the
n-th Monte Carlo run. Similarly, we may also define formulas of the root mean square velocity error.
5.1.Crossing Targets Tracking
5.1.1. Simulation Scenario
Consider a two-crossing target tracking case. The state model is:
where the component of process noise
. The state transition matrix
is defined as:
and the process noise distribution matrix is:
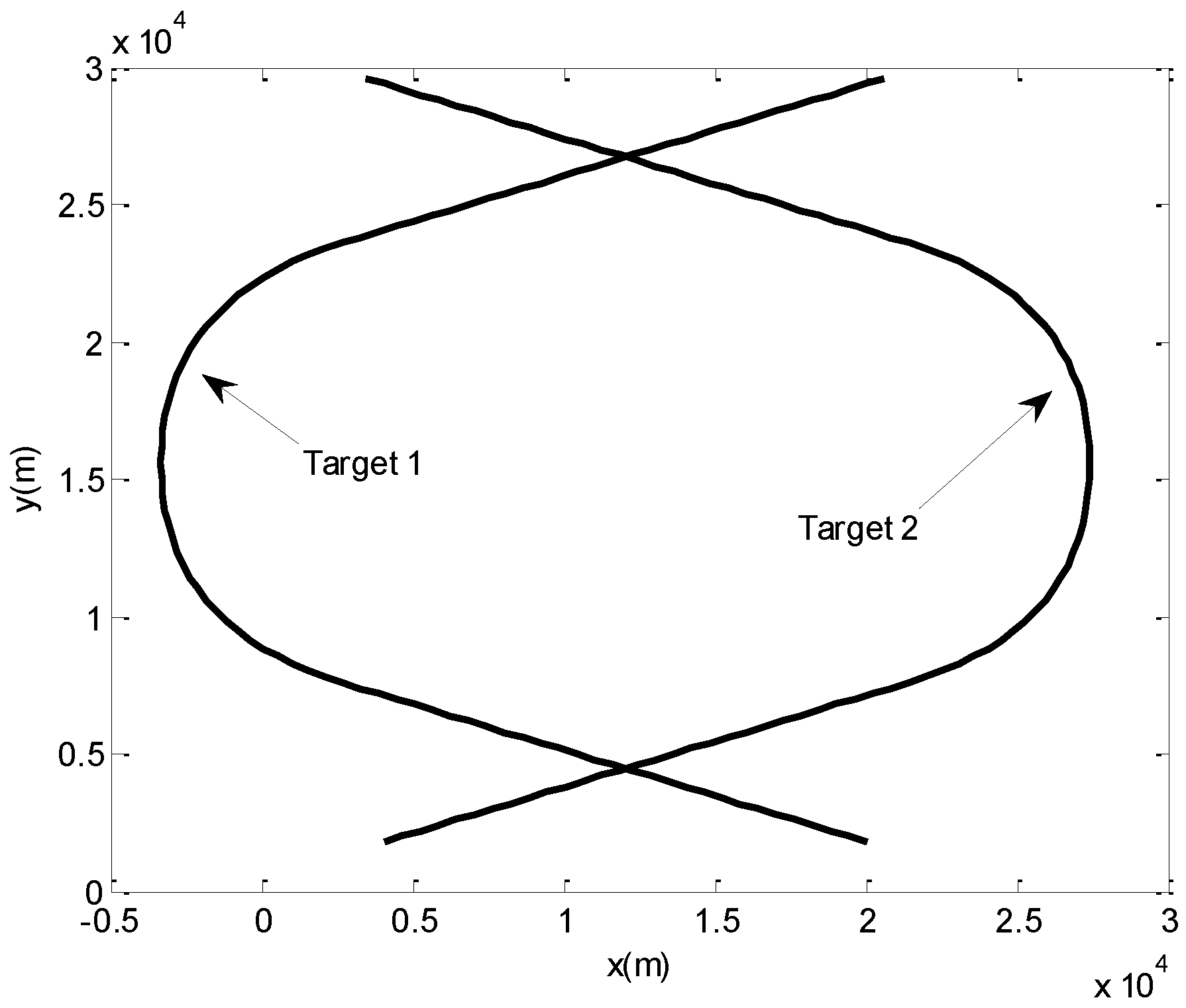
The initial states of two targets are X1(0) = [−29,500 m, 400 m/s, 34,500 m, 2,212,400 m/s]T, X2(0) = [−26,500 m, 296 m/s, 34,500 m, −400 m/s]T. After about 31 s, the two targets cross at the point (−17,000 m, 22,000 m).
5.1.2. Results and Analysis
The true and filtered tracks of two crossing targets are illustrated in
Figure 1, which shows the tracking performance of three algorithms in a single run.
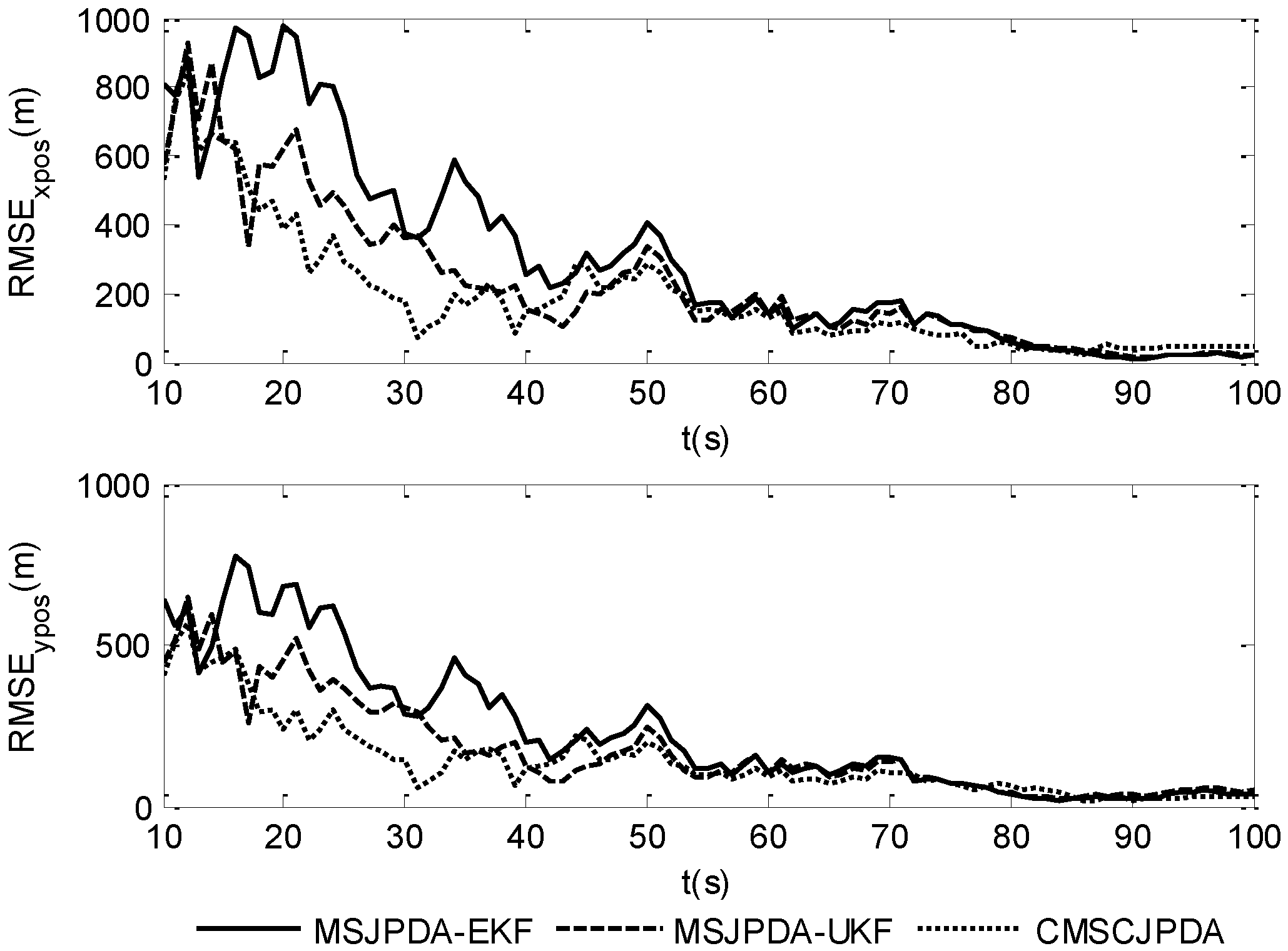
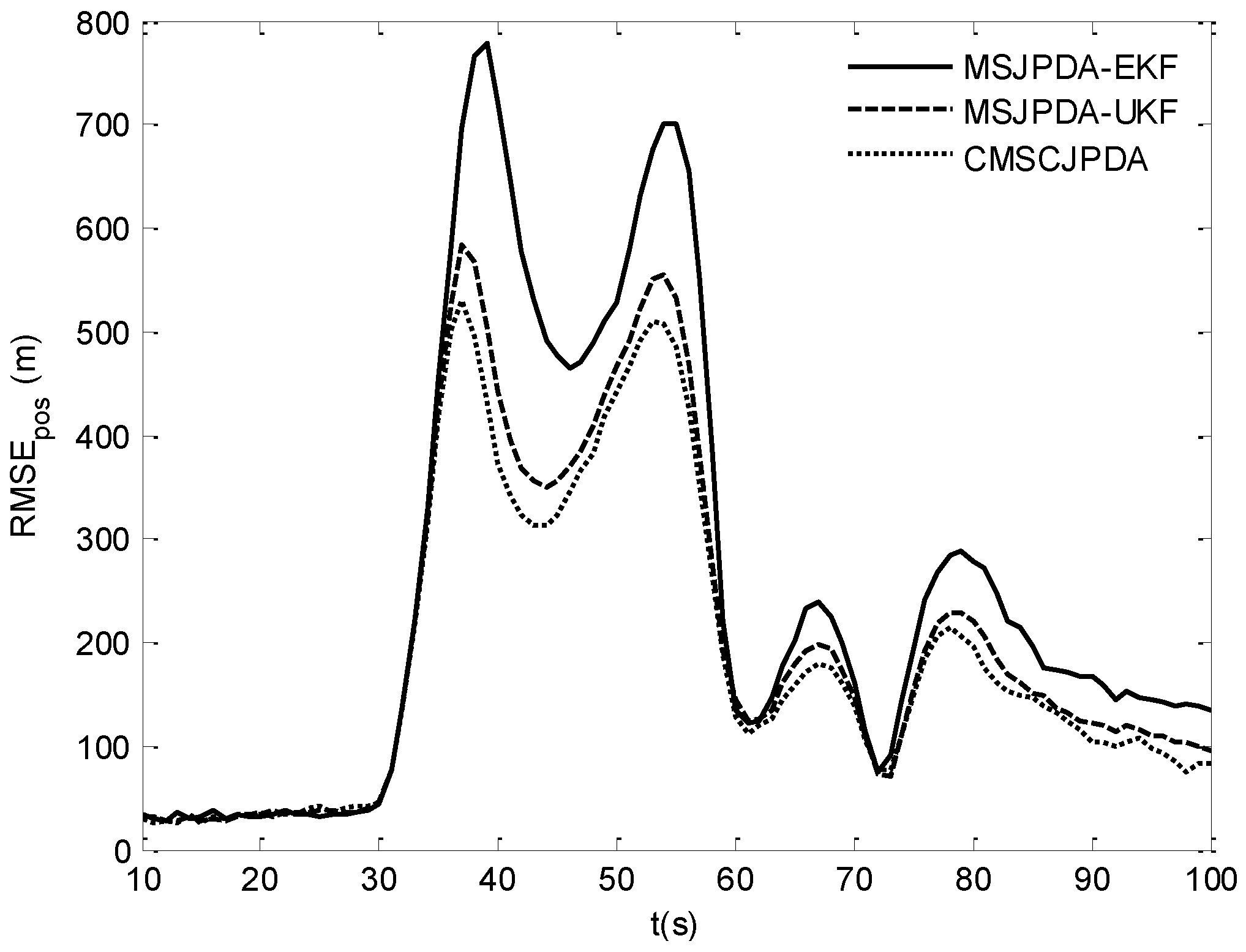
To give a more explicit picture of the estimated results, the root mean square position error of three data association algorithms in the
x and
y directions is shown in
Figure 2 and
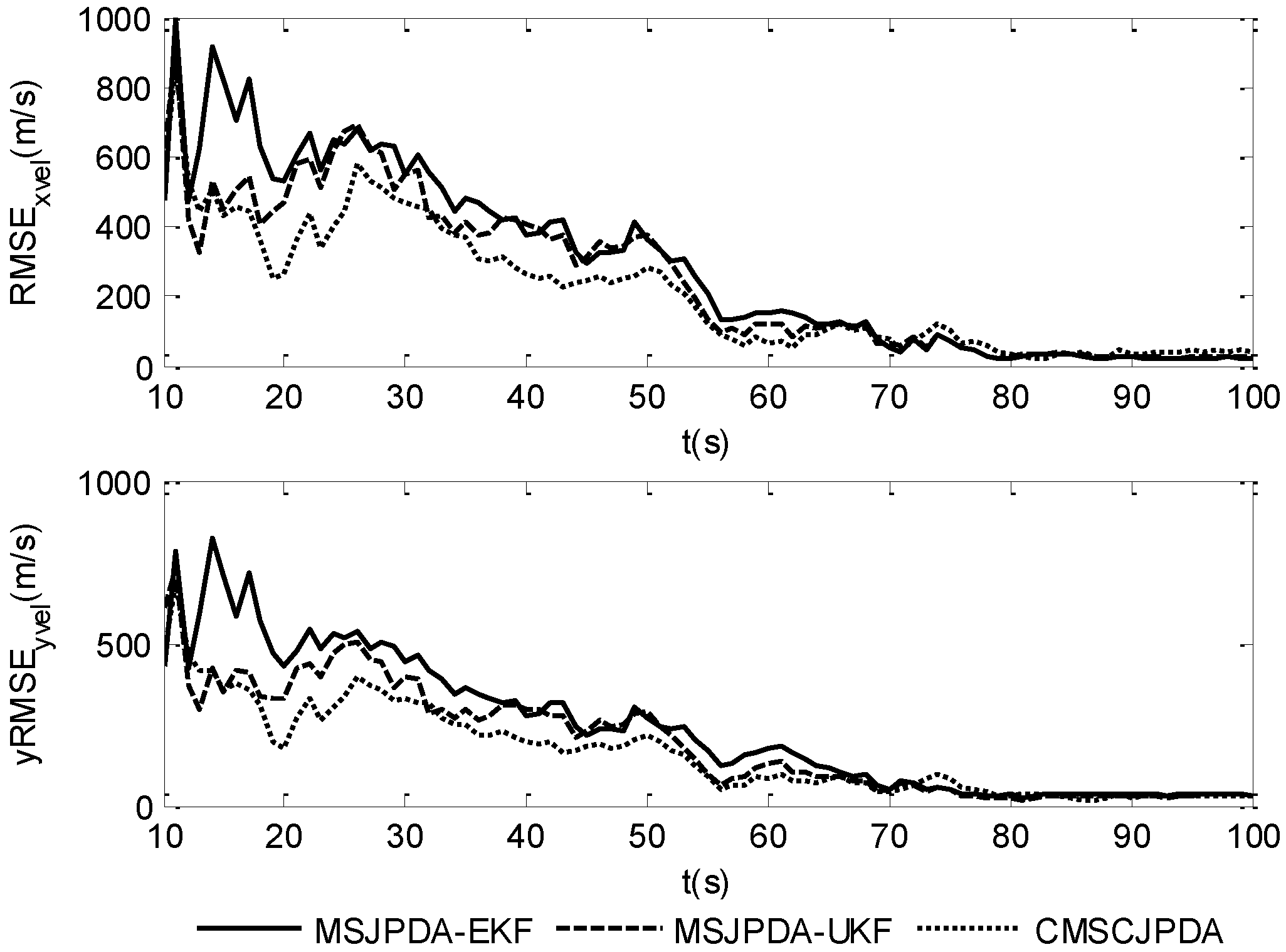
Figure 3, while the root mean square velocity error in the
x and
y directions is shown in
Figure 4 and
Figure 5. As is shown, the three algorithms can effectively estimate the state of both targets. However, CMSCJPDA and MSJPDA-UKF, which are based on deterministic sampling, are of higher tracking accuracy than MSJPDA-EKF, and CMSCJPDA is slightly more accurate than MSJPDA-UKF, which just validates the argument in [
19]. With the square root version of CKF applied in the proposed method, the square rooting operations of covariance matrix is avoided and the tracking performance is effectively enhanced.
To further validate the effectiveness of the proposed algorithm, numerical stability and computational complexity of the three algorithms are compared in
Table 3, which gives the average divergence times (ADT) and average time consumption (ATC) in 50 Monte Carlo runs. As is shown, the ADT of MSJPDA-EKF is twice more than that of MSJPDA-UKF, and nearly four times more than that of CMSCJPDA, to some extent CMSCJPDA is relatively more stable in terms of convergence. As for the computational cost, the ATC of CMSCJPDA is almost half that of MSJPDA-EKF, and less than that of MSJPDA-UKF. In a word, compared with MSJPDA-EKF and MSJPDA-UKF, CMSCJPDA can achieve relatively higher tracking accuracy, and is more stable and less computationally complex under a nonlinear cluttered environment.
5.2. Maneuvering Targets Tracking
5.2.1. Simulation Scenario
Assume there are two maneuvering targets in the surveillance area. The initial states of two targets are
X1(0) = [20,000 m, −600 m/s, 1800 m, 500 m/s]
T,
X2(0) = [4000 m, 600 m/s,1800 m, 200 m/s]
T. The two targets move at a constant speed in a straight line for 30 s. Then, from 30 s to 50 s, they both move with constant accelerations of
a1x = −30 m/s
2,
a1y = 20 m/s
2,
a2x = 30 m/s
2,
a2y = 20 m/s
2 in the
x and
y directions, respectively. From 50 s to 70 s, they still move with constant accelerations, and the accelerations for both targets in the
x and
y directions are
ax1 = −30 m/s
2,
ay1 = −20 m/s
2,
ax2 = 30 m/s
2,
ay2 = −20 m/s
2, respectively. After 70 s, they both move at a constant speed again until 100 s. The true trajectories of both targets are illustrated in
Figure 6.
5.2.2. Results and Analysis
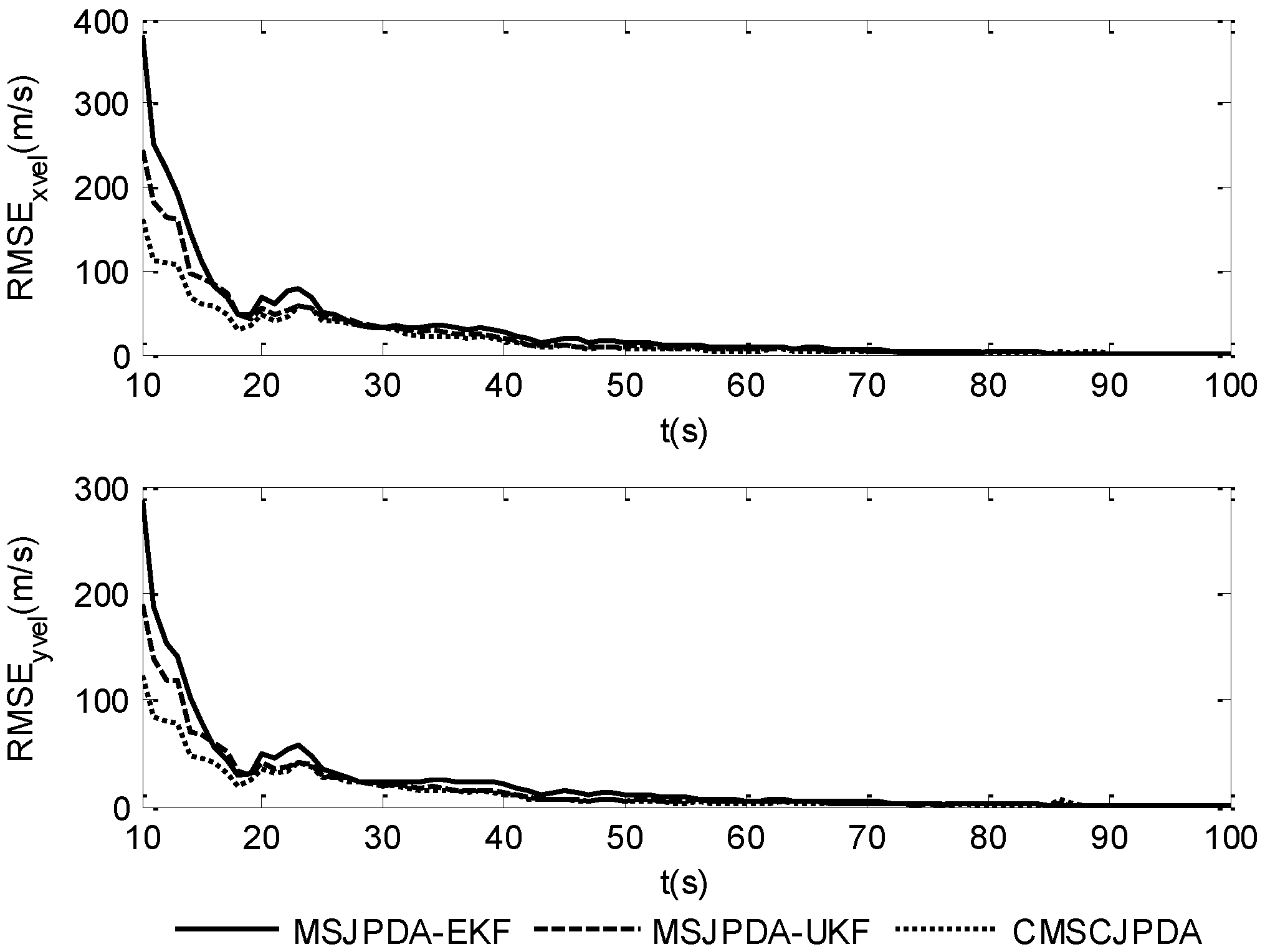
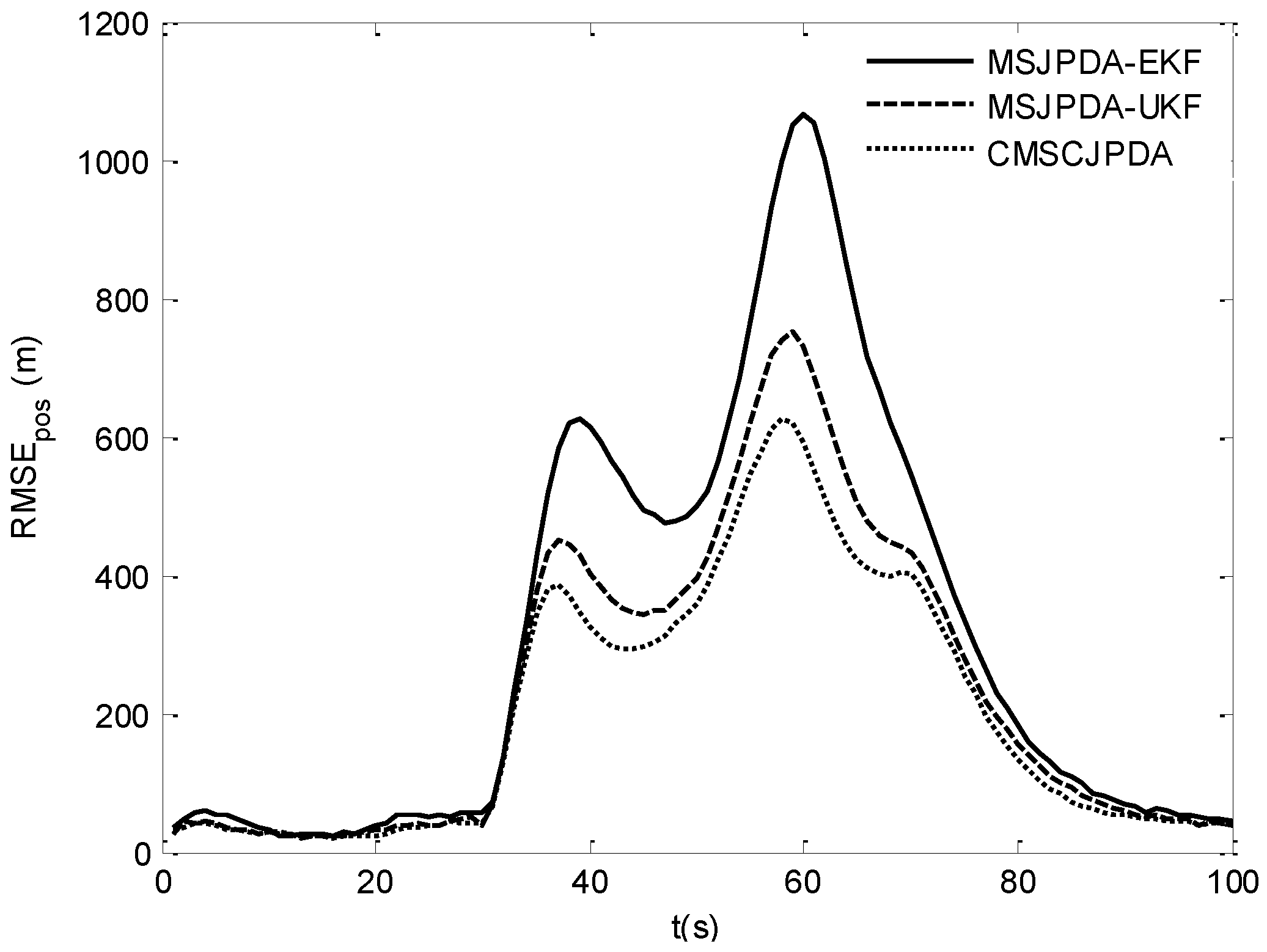
The root mean square (RMS) position error of two targets is compared in
Figure 7 and
Figure 8. The results show that the estimation error of CMSCJPDA and MSJPDA-UKF is much smaller than that of MSJPDA-EKF in the whole simulation. When
t is about 40 s, the estimation error of MSJPDA-EKF is about 200 m larger compared with CMSCJPDA and MSJPDA-UKF. Moreover, with the new association strategy for maneuvering target tracking, CMSCJPDA has relatively higher accuracy than MSJPDA-UKF. At some time instants, the RMS position error of CMSCJPDA is about 50 m smaller than that of MSJPDA-UKF, and it converges relatively faster.
Table 4 evaluates the tracking performance of the three algorithms in the aspects of mean RMS position error (MRMSE) and correct association rate (CAR). The results indicate that both CMSCJPDA and MSJPDA-UKF are more accurate than MSJPDA-UKF, and CMSCJPDA is slightly more accurate than MSJPDA-UKF. Meanwhile, the CAR of CMSCJPDA is the highest among the three algorithms, which is 11.1% higher than MSJPDA-UKF and 28.7% higher than MSJPDA-EKF, and CMSCJPDA is more time-saving.
6. Conclusions
In this paper, we propose a centralized multi-sensor square root cubature joint probabilistic data association algorithm, which is based on the spherical-radial principle and the sequential update scheme. Compared with the state-of-the-art method in two tracking scenarios, the proposed method is much more accurate than MSJPDA-EKF, and a slightly better than MSJPDA-UKF by using the square root version of cubature Kalman filter to estimate the target state. Furthermore, the experimental results also show that the proposed method is less prone to divergence than MSJPDA-EKF and MSJPDA-UKF, and is more stable with respect to its numerical characteristics. Although the proposed method is less time consuming among the compared methods, due to complicated calculation of the association probability, the joint probabilistic data association-based methods are of significant computational cost, which is still less practical in real applications. Currently, the sensors in our experiment are assumed to be synchronized sampling, and there is no time difference in measurements from different sensors. However, the actual applications can rarely meet this condition, and in the future we will pay more attention to reducing the computational cost and improving the real-time performance. At the same time, the tracking problem with asynchronous sampling and changing the number of targets also deserves consideration.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}