Coverage Probability and Area Spectral Efficiency of Clustered Linear Unmanned Vehicle Sensor Networks



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Motivation and Related Work
1.2. Originalities and Contributions
1.3. Organization
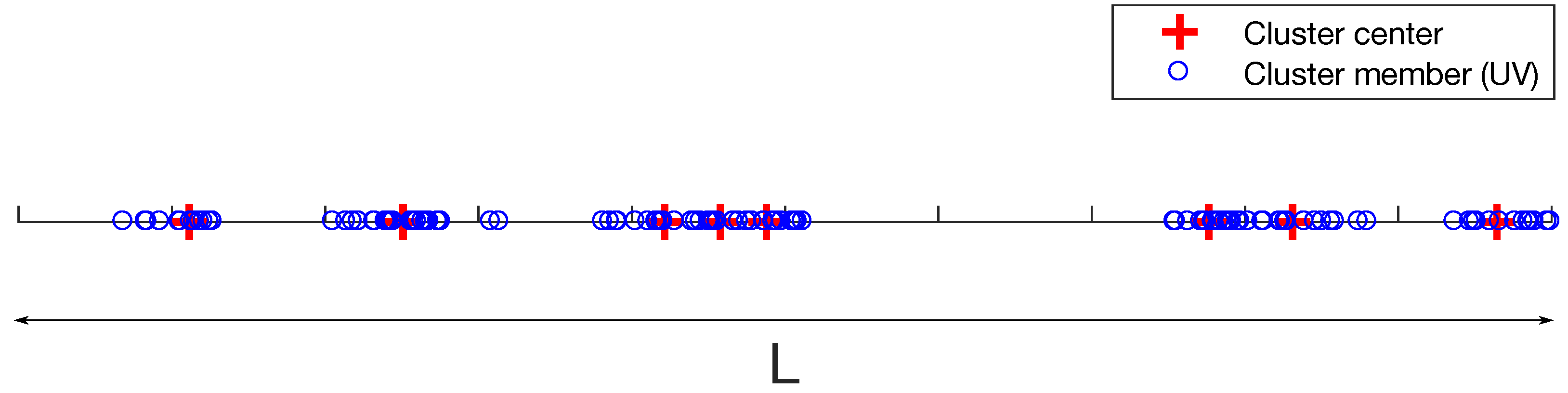
2. System Model
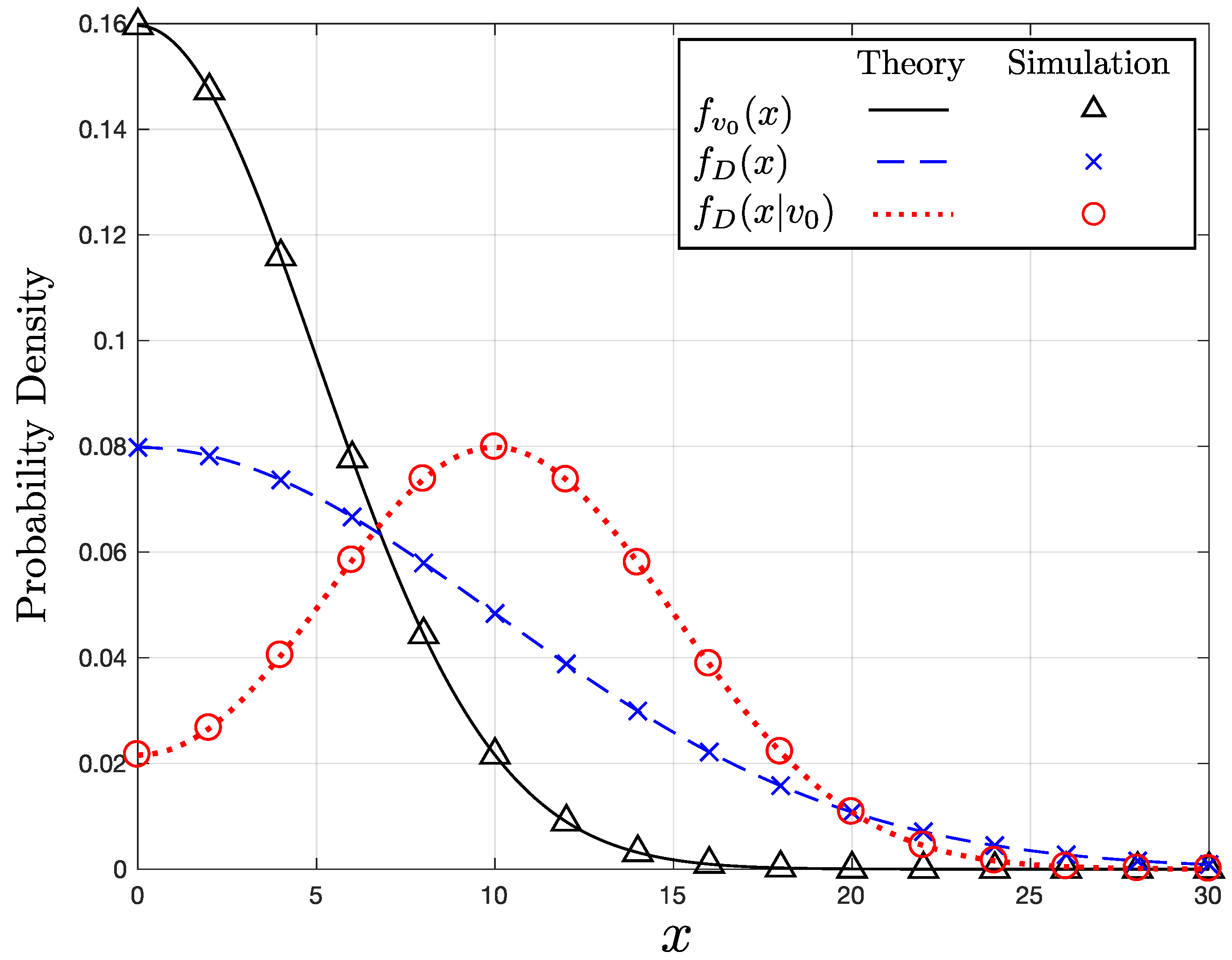
3. Communication Distance Distributions
3.1. Distance between Typical UV and Intra-Cluster UV-Tx
3.2. Conditional Distance Distribution given
3.3. Distances to Serving UV-Tx and Interferers: r, w, and u
3.4. Validation through Simulation
4. Performance Analysis
4.1. Laplace Transform of Intra-Cluster Interference
4.2. Laplace Transform of Inter-Cluster Interference
4.3. Coverage Probability and Area Spectral Efficiency
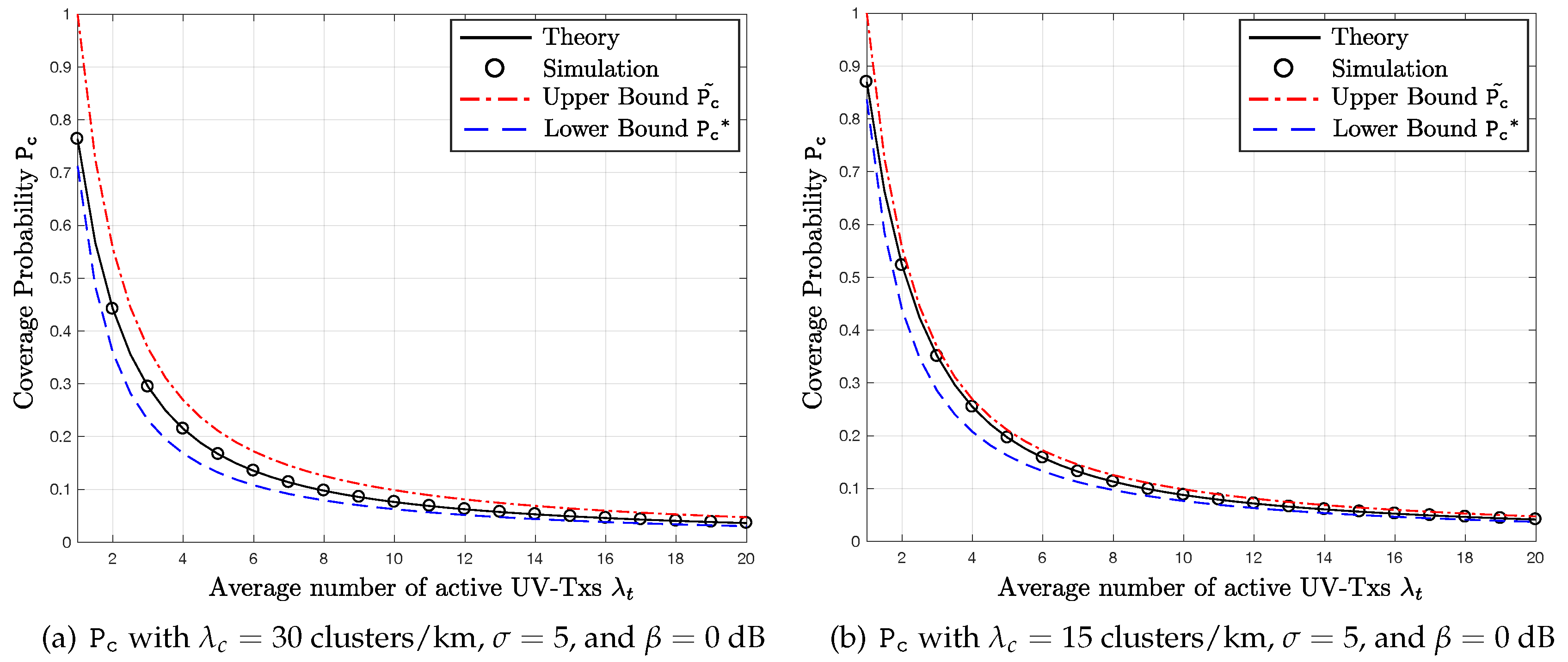
5. Approximate Upper and Lower Bounds of Pc
5.1. Upper Bound of Pc
5.2. Lower Bound of Pc
6. Numerical and Simulation Results
6.1. Upper and Lower Bounds
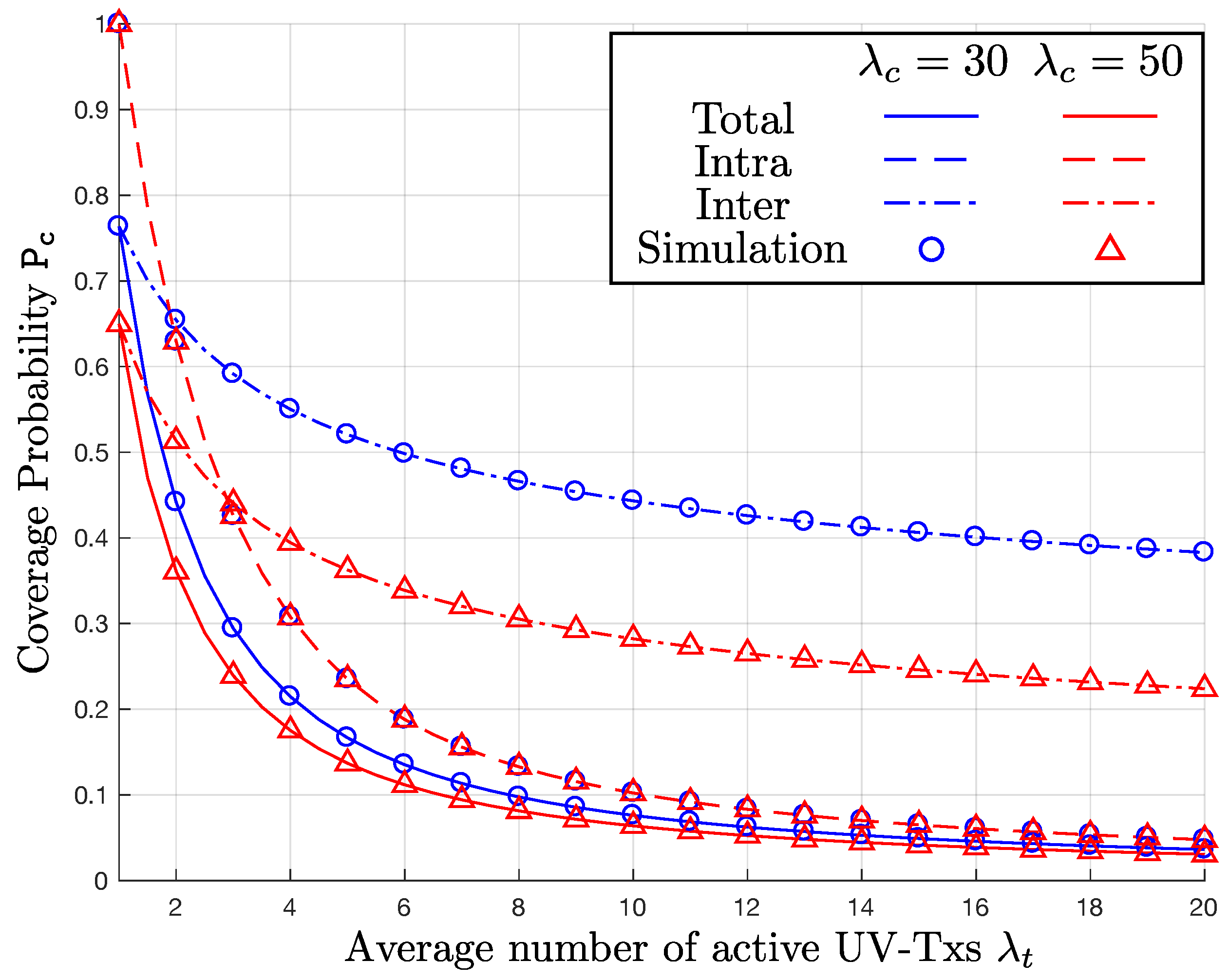
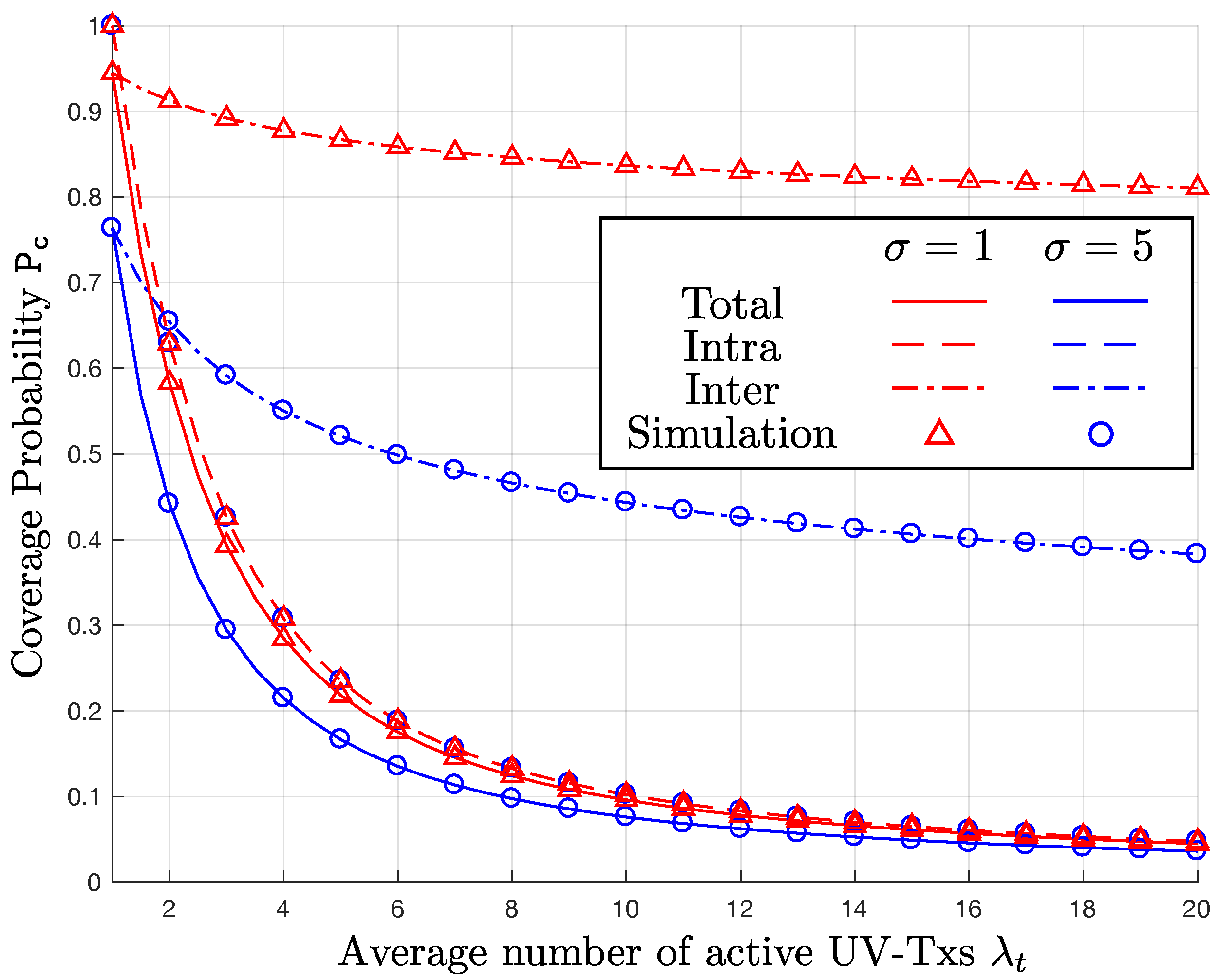
6.2. Impact of and on
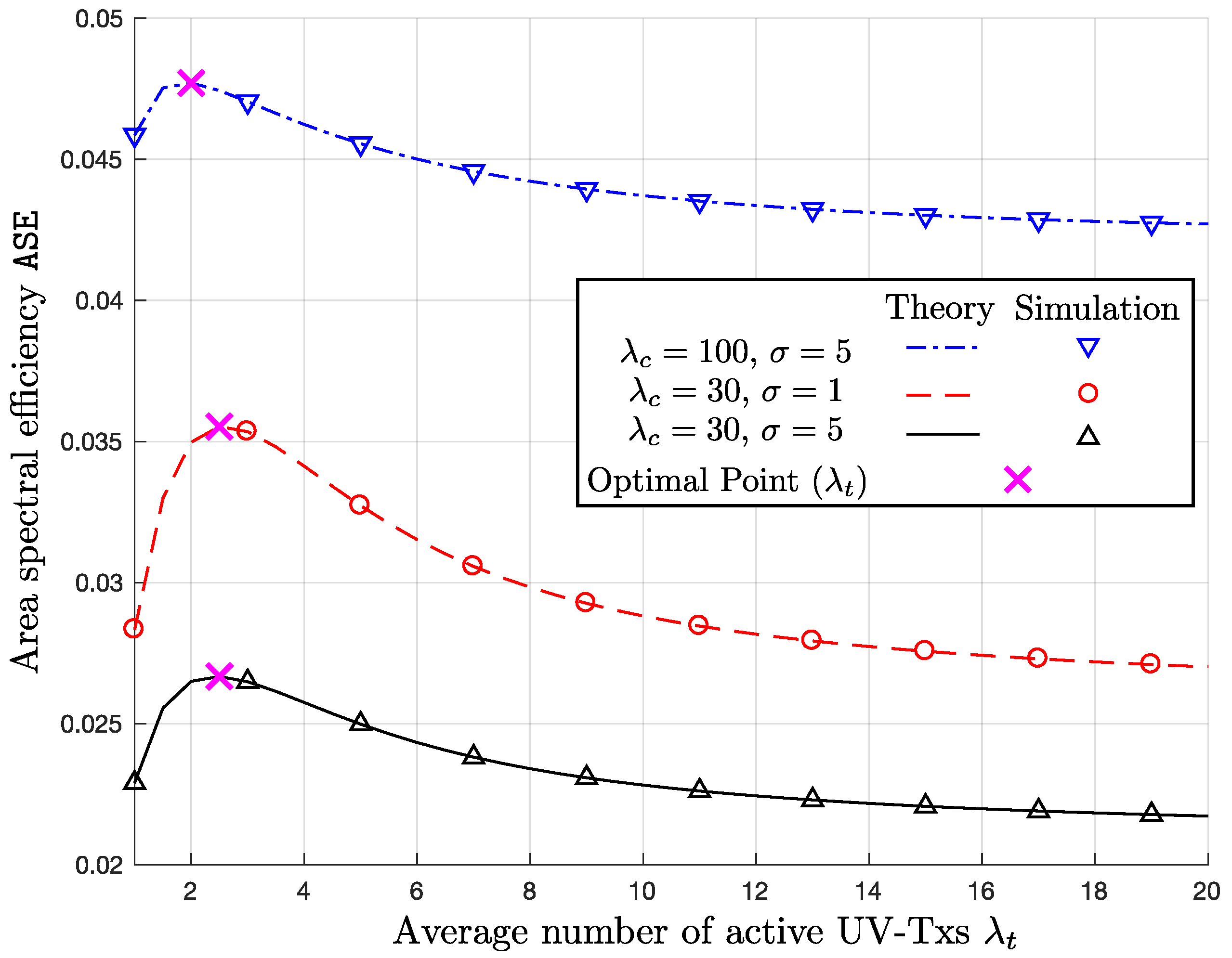
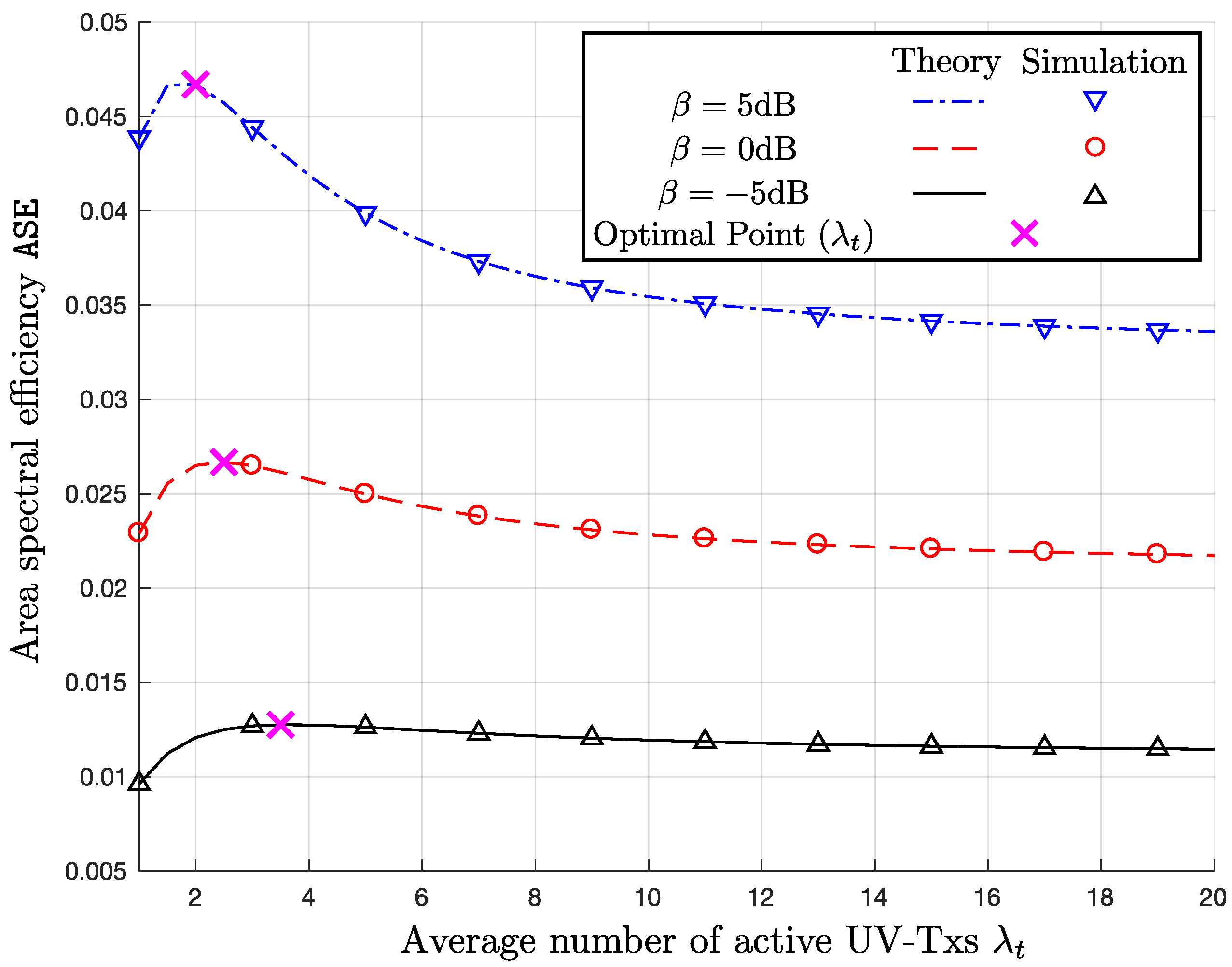
6.3. Area Spectral Efficiency
7. Conclusions and Future Work
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| UV | Unmanned vehicle |
| TCP | Thomas cluster process |
| PPP | Poisson point process |
| 1D | One-dimensional |
| 2D | Two-dimensional |
| 3D | Three-dimensional |
| VANETs | Vehicular ad hoc networks |
| SIR | Signal-to-interference-ratio |
| Probability density function | |
| PC | Probability of coverage |
| ASE | Area spectral efficiency |
| PGF | Probability generating functional |
Appendix A. Proof of Corollary 1
Appendix B. Proof of Corollary 2
References
- Siciliano, B.; Khatib, O. Springer Handbook of Robotics; Springer: New York, NY, USA, 2016. [Google Scholar]
- Kehoe, B.; Patil, S.; Abbeel, P.; Goldberg, K. A survey of research on cloud robotics and automation. IEEE Trans. Autom. Sci. Eng. 2015, 12, 398–409. [Google Scholar] [CrossRef]
- Hu, G.; Tay, W.P.; Wen, Y. Cloud robotics: Architecture, challenges and applications. IEEE Netw. 2012, 26, 21–28. [Google Scholar] [CrossRef]
- Sun, Z.; Akyildiz, I.F.; Hancke, G.P. Dynamic connectivity in wireless underground sensor networks. IEEE Trans. Wirel. Commun. 2011, 10, 4334–4344. [Google Scholar] [CrossRef]
- Raty, T.D. Survey on contemporary remote surveillance systems for public safety. IEEE Trans. Syst. Man Cybern. 2010, 40, 493–515. [Google Scholar] [CrossRef]
- Wan, J.; Tang, S.; Yan, H.; Li, D.; Wang, S.; Vasilakos, A.V. Cloud robotics: Current status and open issues. IEEE Access 2016, 4, 2797–2807. [Google Scholar] [CrossRef]
- Min, B.-C.; Kim, Y.; Lee, S.; Jung, J.W.; Matson, E.T. Finding the optimal location and allocation of relay robots for building a rapid end-to-end wireless communication. Ad Hoc Netw. 2016, 39, 23–44. [Google Scholar] [CrossRef]
- Gerla, M.; Yi, Y. Team communications among autonomous sensor swarms. ACM SIGMOD Rec. 2004, 33, 20–25. [Google Scholar] [CrossRef]
- Ryan, A.; Tisdale, J.; Godwin, M.; Coatta, D.; Nguyen, D.; Spry, S.; Sengupta, R.; Hedrick, J.K. Decentralized control of unmanned aerial vehicle collaborative sensing missions. In Proceedings of the 2007 American Control Conference, New York, NY, USA, 9–13 July 2007; pp. 4672–4677. [Google Scholar]
- Hassan, S.A.; Ingram, M.A. A quasi-stationary Markov chain model of a cooperative multi-hop linear network. IEEE Trans. Wirel. Commun. 2011, 10, 2306–2315. [Google Scholar] [CrossRef]
- Bacha, M.; Hassan, S.A. Performance analysis of linear cooperative multi-hop networks subject to composite shadowing-fading. IEEE Trans. Wirel. Commun. 2013, 12, 5850–5858. [Google Scholar] [CrossRef]
- Jung, H.; Weitnauer, M.A. Multi-packet opportunistic large array transmission on strip-shaped cooperative routes or networks. IEEE Trans. Wirel. Commun. 2014, 13, 144–158. [Google Scholar] [CrossRef]
- Jung, H.; Weitnauer, M.A. Analysis of intra-flow interference in opportunistic large array transmission for strip networks. In Proceedings of the 2012 IEEE International Conference on Communications (ICC), Ottawa, ON, Canada, 10–15 June 2012; pp. 104–108. [Google Scholar]
- ElSawy, H.; Hossain, E.; Haenggi, M. Stochastic geometry for modeling, analysis, and design of multi-tier and cognitive cellular wireless networks: A survey. IEEE Commun. Surv. Tutor. 2013, 15, 996–1019. [Google Scholar] [CrossRef]
- Haenggi, M.; Andrews, J.G.; Baccelli, F.; Dousse, O.; Franceschetti, M. Stochastic geometry and random graphs for the analysis and design of wireless networks. IEEE J. Sel. Areas Commun. 2009, 27, 1029–1046. [Google Scholar] [CrossRef]
- ElSawy, H.; Sultan-Salem, A.; Alouini, M.S.; Win, M.Z. Modeling and analysis of cellular networks using stochastic geometry: A tutorial. IEEE Commun. Surv. Tutor. 2017, 19, 167–203. [Google Scholar] [CrossRef]
- Cardieri, P. Modeling interference in wireless ad hoc networks. IEEE Commun. Surv. Tutor. 2010, 12, 551–572. [Google Scholar] [CrossRef]
- Sousa, E.S. Optimum transmission range in a direct-sequence spread spectrum multihop packet radio network. IEEE J. Sel. Areas Commun. 1990, 8, 762–771. [Google Scholar] [CrossRef]
- Hunter, A.M.; Andrews, J.G.; Weber, S.P. Transmission capacity of ad hoc networks with spatial diversity. IEEE Trans. Wirel. Commun. 2008, 7, 5058–5071. [Google Scholar] [CrossRef]
- Inaltekin, H.; Wicker, S.B.; Chiang, M.; Poor, H.V. On unbounded path-loss models: Effects of singularity on wireless network performance. IEEE J. Sel. Areas Commun. 2009, 27, 1078–1092. [Google Scholar] [CrossRef]
- Zhang, X.; Haenggi, M. Random power control in Poisson networks. IEEE Trans. Commun. 2012, 60, 2602–2611. [Google Scholar] [CrossRef]
- Salbaroli, E.; Zanella, A. Interference analysis in a Poisson field of nodes of finite area. IEEE Trans. Veh. Technol. 2009, 58, 1776–1783. [Google Scholar] [CrossRef]
- Andrews, J.G.; Baccelli, F.; Ganti, R.K. A tractable approach to coverage and rate in cellular networks. IEEE Trans. Commun. 2011, 59, 3122–3134. [Google Scholar] [CrossRef]
- Guo, A.; Haenggi, M. Spatial stochastic models and metrics for the structure of base stations in cellular networks. IEEE Trans. Wirel. Commun. 2013, 12, 5800–5812. [Google Scholar] [CrossRef]
- Dhillon, H.S.; Andrews, J.G. Downlink rate distribution in heterogeneous cellular networks under generalized cell selection. IEEE Wirel. Commun. Lett. 2014, 3, 42–45. [Google Scholar] [CrossRef]
- Singh, S.; Baccelli, F.; Andrews, J.G. On association cells in random heterogeneous networks. IEEE Wirel. Commun. Lett. 2014, 3, 70–73. [Google Scholar] [CrossRef]
- Bai, T.; Vaze, R.; Heath, R.W. Analysis of blockage effects on urban cellular networks. IEEE Trans. Wirel. Commun. 2014, 13, 5070–5083. [Google Scholar] [CrossRef]
- Jung, H.; Lee, I.-H. Outage analysis of millimeter-wave wireless backhaul in the presence of blockage. IEEE Commun. Lett. 2016, 20, 2268–2271. [Google Scholar] [CrossRef]
- Jung, H.; Lee, I.-H. Outage analysis of multihop wireless backhaul Using millimeter wave under blockage effects. Int. J. Antennas Propag. 2017, 2017, 4519365. [Google Scholar] [CrossRef]
- Jung, H.; Lee, I.-H. Connectivity analysis of millimeter-wave device-to-device networks with blockage. Int. J. Antennas Propag. 2016, 2016, 7939671. [Google Scholar] [CrossRef]
- ElSawy, H.; Hossain, E.; Kim, D.I. HetNets with cognitive small cells: User offloading and distributed channel access techniques. IEEE Commun. Mag. 2013, 51, 28–36. [Google Scholar] [CrossRef]
- Soh, Y.S.; Quek, T.Q.S.; Kountouris, M.; Caire, G. Cognitive hybrid division duplex for two-tier femtocell networks. IEEE Trans. Wirel. Commun. 2013, 12, 4852–4865. [Google Scholar] [CrossRef]
- Nigam, G.; Minero, P.; Haenggi, M. Coordinated multipoint joint transmission in heterogeneous networks. IEEE Trans. Commun. 2014, 62, 4134–4146. [Google Scholar] [CrossRef]
- Sakr, A.H.; Hossain, E. Location-aware cross-tier coordinated multipoint transmission in two-tier cellular networks. IEEE Trans. Wirel. Commun. 2014, 13, 6311–6325. [Google Scholar] [CrossRef]
- Flint, I.; Lu, X.; Privault, N.; Niyato, D.; Wang, P. Performance analysis of ambient RF energy harvesting with repulsive point process modeling. IEEE Trans. Wirel. Commun. 2015, 14, 5402–5416. [Google Scholar] [CrossRef]
- Deng, N.; Zhou, W.; Haenggi, M. The Ginibre point process as a model for wireless networks with repulsion. IEEE Trans. Wirel. Commun. 2015, 14, 107–121. [Google Scholar] [CrossRef]
- Afshang, M.; Dhillon, H.S.; Chong, P.H.J. Modeling and performance analysis of clustered device-to-device networks. IEEE Trans. Wirel. Commun. 2016, 15, 4957–4972. [Google Scholar] [CrossRef]
- Jung, H.; Lee, I.-H. Performance analysis of three-dimensional clustered device-to-device networks for Internet of things. Wirel. Commun. Mob. Comput. 2017, in press. [Google Scholar]
- Krause, A.; Singh, A.; Guestrin, C. Near-optimal sensor placements in Gaussian processes: Theory, efficient algorithms and empirical studies. J. Mach. Learn. Res. 2008, 9, 235–284. [Google Scholar]
- Ameer, A.; Abbasi, A.; Younis, M. A survey on clustering algorithms for wireless sensor networks. Comput. Commun. 2007, 30, 2826–2841. [Google Scholar]
- Cunha, F.D.; Vianna, A.C.; Mini, R.A.F.; Loureiro, A.A.F. How effective is to look at a vehicular network under a social perception? In Proceedings of the 2013 IEEE 9th International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob), Lyon, France, 7–9 October 2013; pp. 2160–4886. [Google Scholar]
- Liu, X.; Li, Z.; Li, W.; Lu, S.; Wang, X.; Chen, D. Exploring social properties in vehicular ad hoc networks. In Proceedings of the Fourth Asia-Pacific Symposium on Internetware, Qingdao, China, 30–31 October 2012; pp. 241–247. [Google Scholar]
- Monteiro, R.; Sargento, S.; Viriyasitavat, W.; Tonguz, O.K. Improving VANET protocols via network science. In Proceedings of the 2012 IEEE Vehicular Networking Conference (VNC), Seoul, Korea, 14–16 November 2012; pp. 17–24. [Google Scholar]
- Ghahramani, S.A.A.G.; Hemmatyar, A.M.A.; Kavousi, K. A network model for vehicular ad hoc networks: An introduction to obligatory attachment rule. IEEE Trans. Netw. Sci. Eng. 2016, 3, 82–94. [Google Scholar] [CrossRef]
- Zhang, C.; Zhang, W. Spectrum sharing for drone networks. IEEE J. Sel. Areas Commun. 2017, 35, 136–144. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R.; Lim, T.J. Wireless communications with unmanned aerial vehicles: Opportunities and challenges. IEEE Commun. Mag. 2016, 54, 36–42. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Unmanned aerial vehicle with underlaid device-to-device communications: Performance and tradeoffs. IEEE Trans. Wirel. Commun. 2016, 15, 3949–3963. [Google Scholar] [CrossRef]
- Matolak, D.W. Channel modeling for vehicle-to-vehicle communications. IEEE Commun. Mag. 2008, 46, 76–83. [Google Scholar] [CrossRef]
- Crofton, M. Probability, in Encyclopedia Britannica, 9th ed.; Britannica Inc.: Chicago, IL, USA, 1885. [Google Scholar]
- Haenggi, M. Stochastic Geometry for Wireless Networks; Cambridge University Press: Cambridge, UK, 2012. [Google Scholar]







© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jung, H.; Lee, I.-H. Coverage Probability and Area Spectral Efficiency of Clustered Linear Unmanned Vehicle Sensor Networks. Sensors 2017, 17, 2550. https://doi.org/10.3390/s17112550
Jung H, Lee I-H. Coverage Probability and Area Spectral Efficiency of Clustered Linear Unmanned Vehicle Sensor Networks. Sensors. 2017; 17(11):2550. https://doi.org/10.3390/s17112550
Chicago/Turabian StyleJung, Haejoon, and In-Ho Lee. 2017. "Coverage Probability and Area Spectral Efficiency of Clustered Linear Unmanned Vehicle Sensor Networks" Sensors 17, no. 11: 2550. https://doi.org/10.3390/s17112550
APA StyleJung, H., & Lee, I. -H. (2017). Coverage Probability and Area Spectral Efficiency of Clustered Linear Unmanned Vehicle Sensor Networks. Sensors, 17(11), 2550. https://doi.org/10.3390/s17112550