First Spaceborne SAR-GMTI Experimental Results for the Chinese Gaofen-3 Dual-Channel SAR Sensor


Abstract
:1. Introduction
2. Geometry and Signal Model
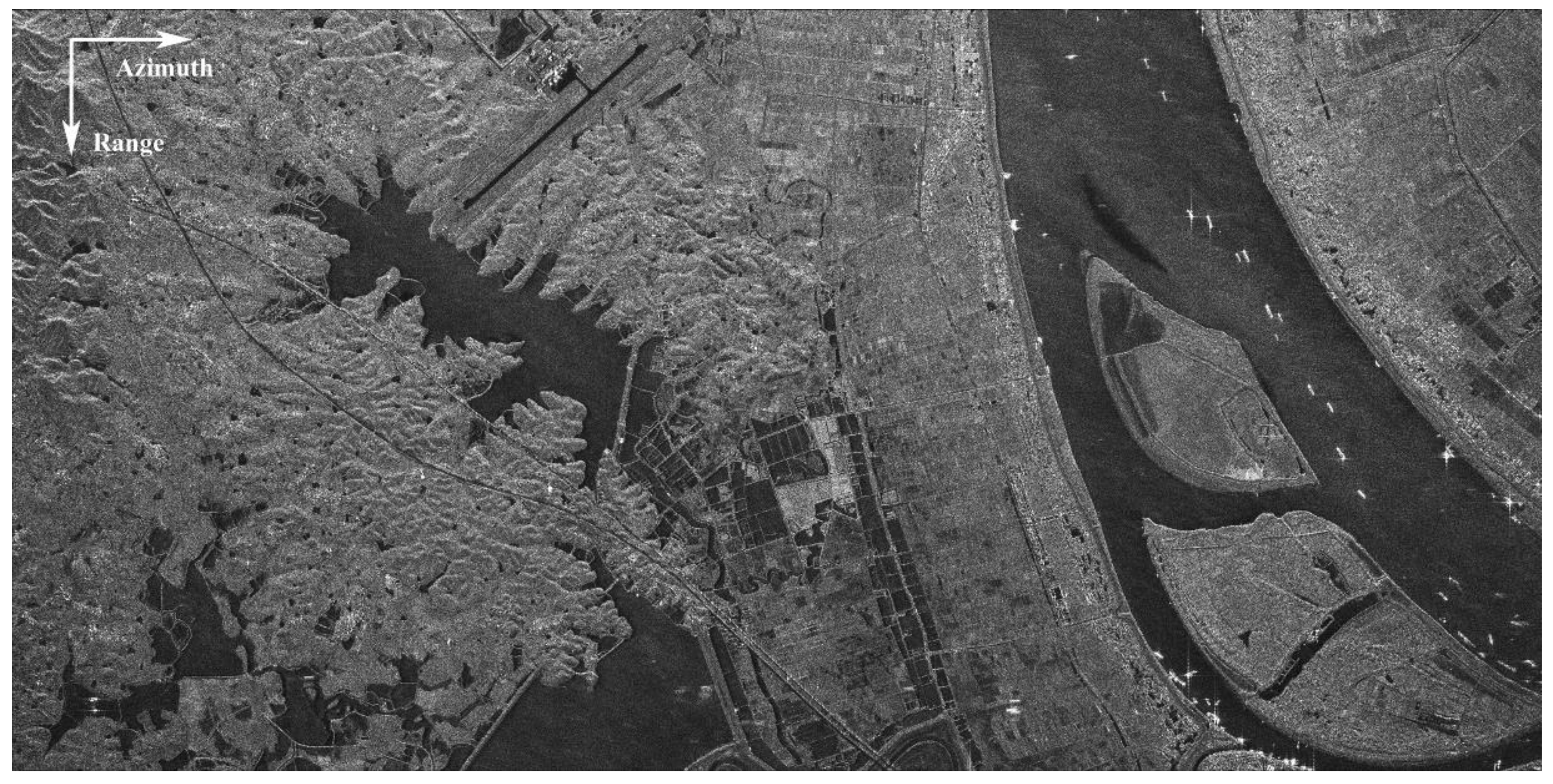
2.1. Gaofen-3 SAR Sensor and Data Acquisition
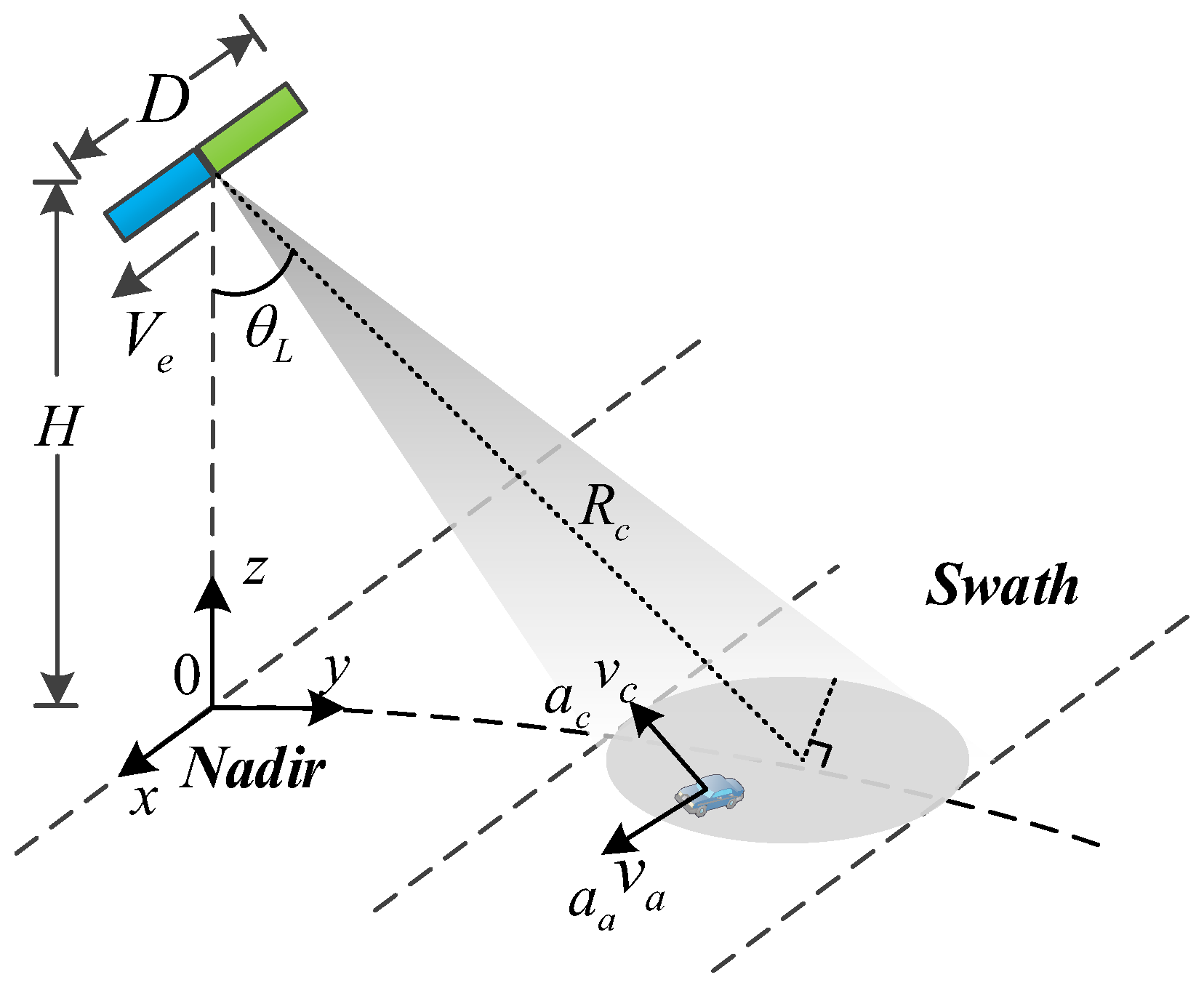
2.2. DRC GMTI Experimental Mode Geometry
2.3. Signal Model
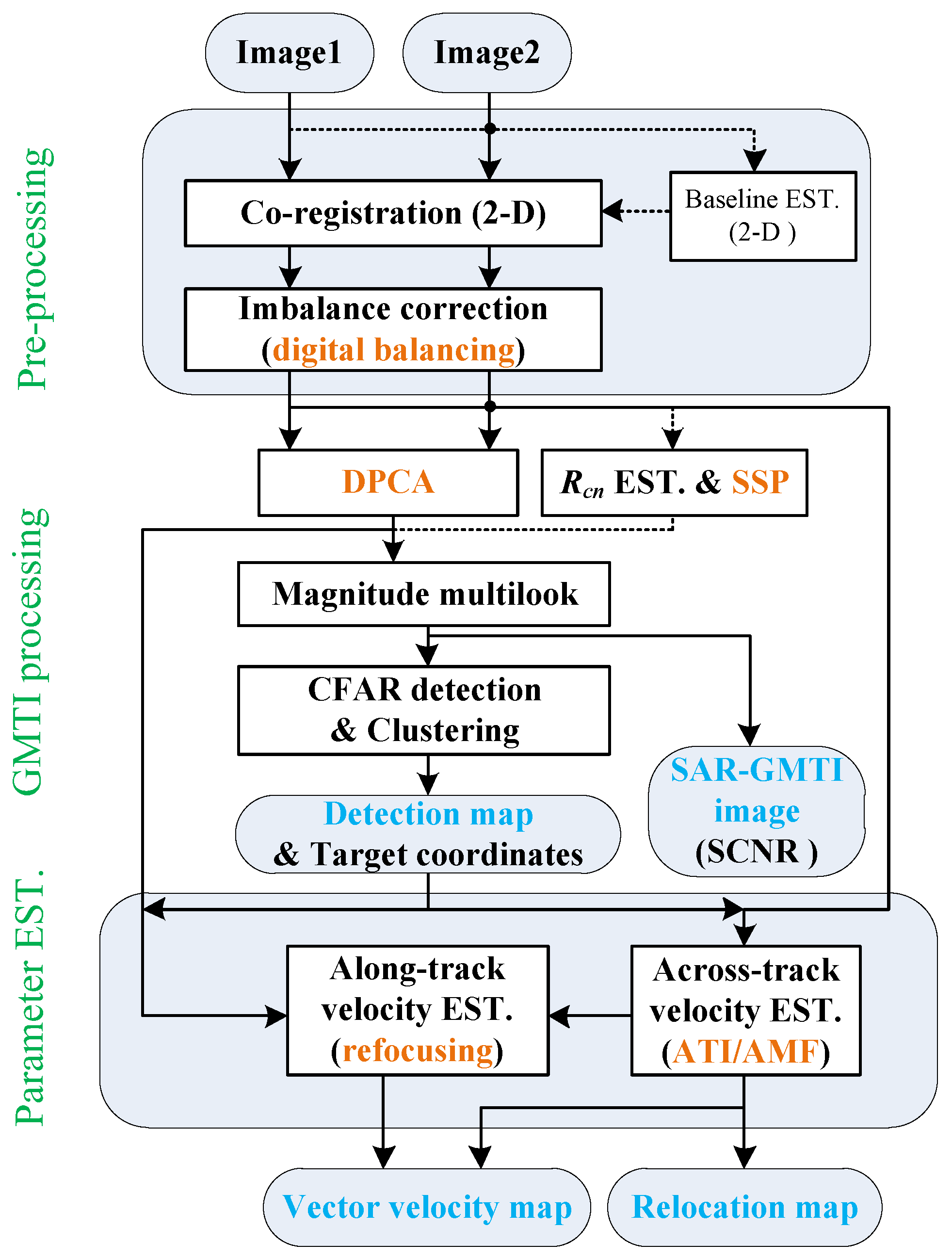
3. Image Domain SAR-GMTI Method
3.1. Baseline Estimation and Images Co-Registration
- Transform a pair of images and into 2-D frequency domain as and .
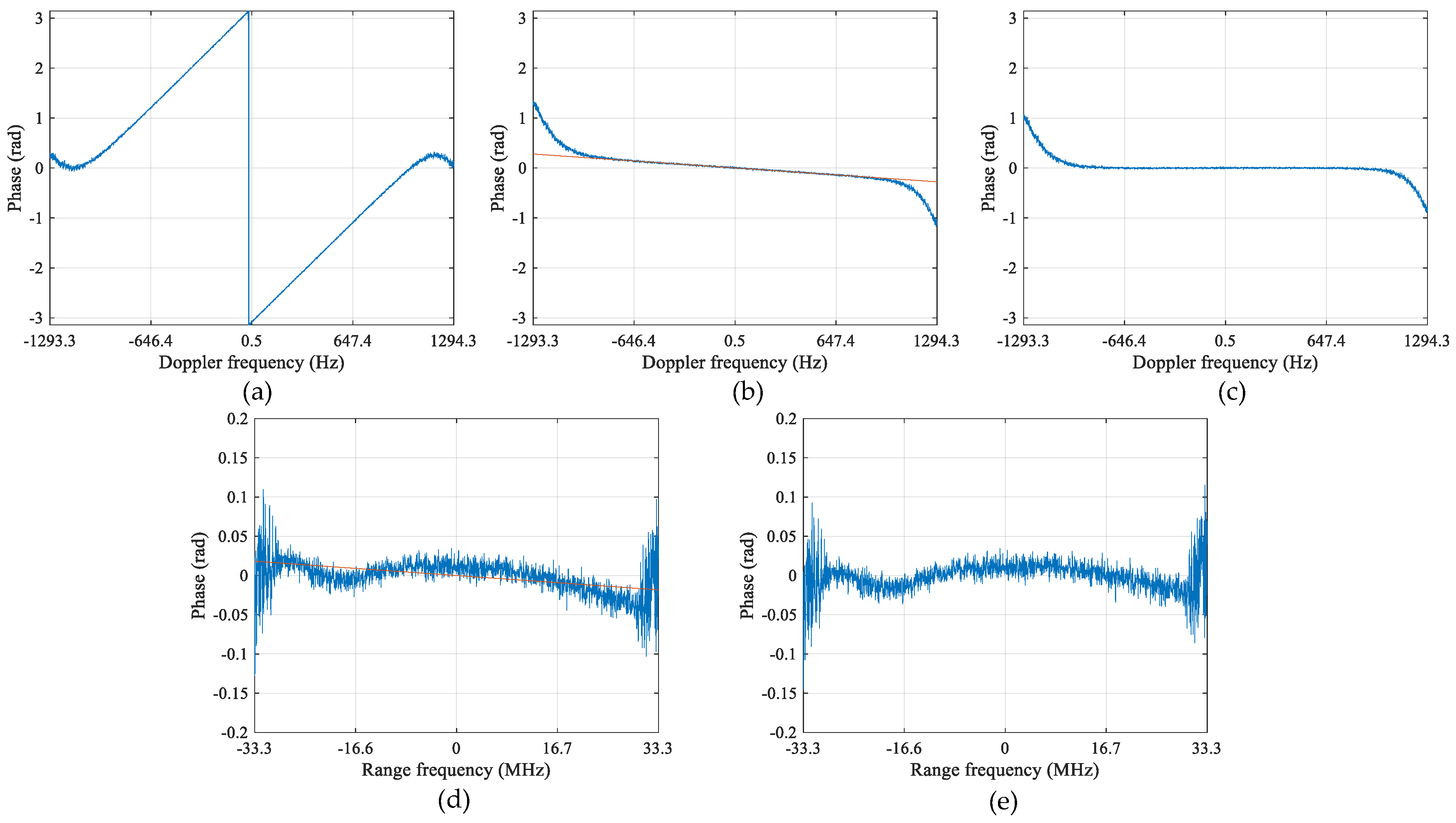
- Remove the nominal baseline induced phase ramp as
- Estimate the interferometric phase between and over Doppler domain by averaging along range frequency to bring down noise levelwhere represents the conjugate operator.
- Fit the residual phase of with polynomials as (first order is enough for spaceborne SAR sensors with stable orbit movement)where denotes taking the argument, and is the Doppler bandwidth used for fitting.Calculate the effective baseline by modifying the nominal baseline with the residual baseline obtained from the first-order coefficient.Compensate the residual phase ramp of Image 2 with the estimated phase ramp as
- Average the interferometry along Doppler asEstimate the phase ramp induced by across-track baseline using linear regression asCompensate the phase ramp for as
- The 2-D co-registered Image 2 is obtained by 2-D IFFT of .
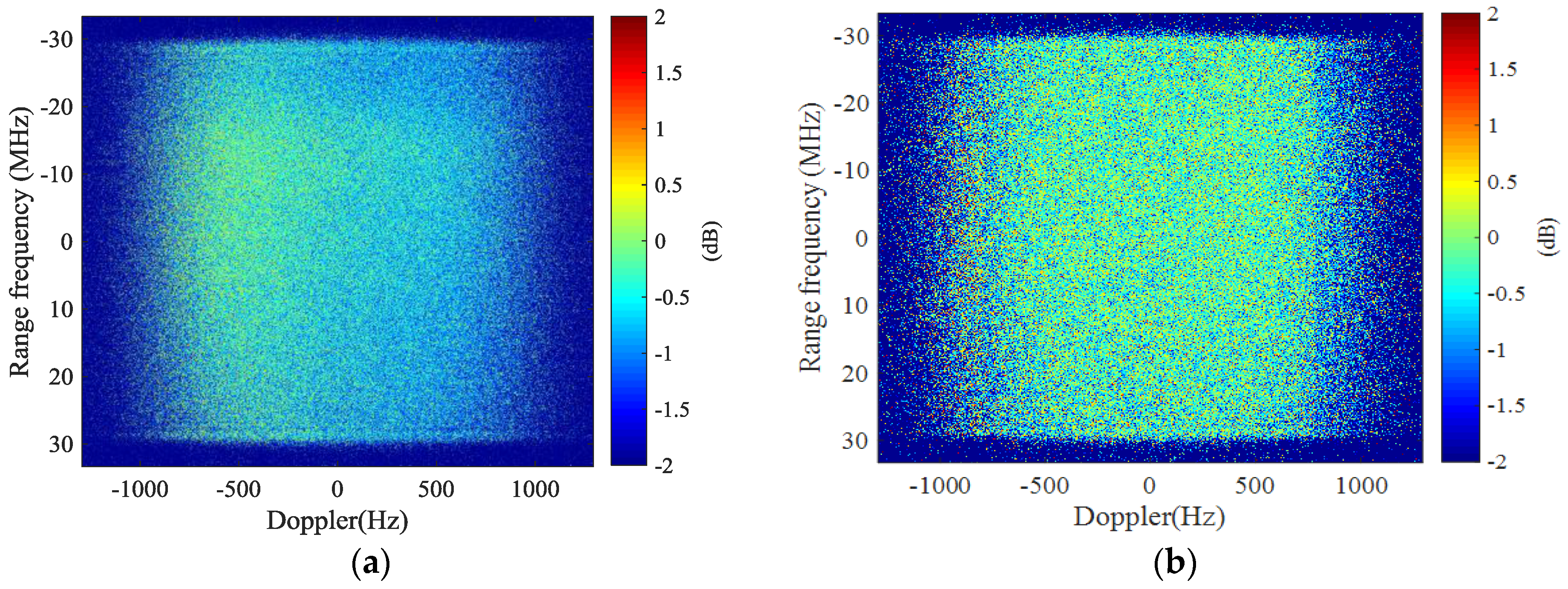
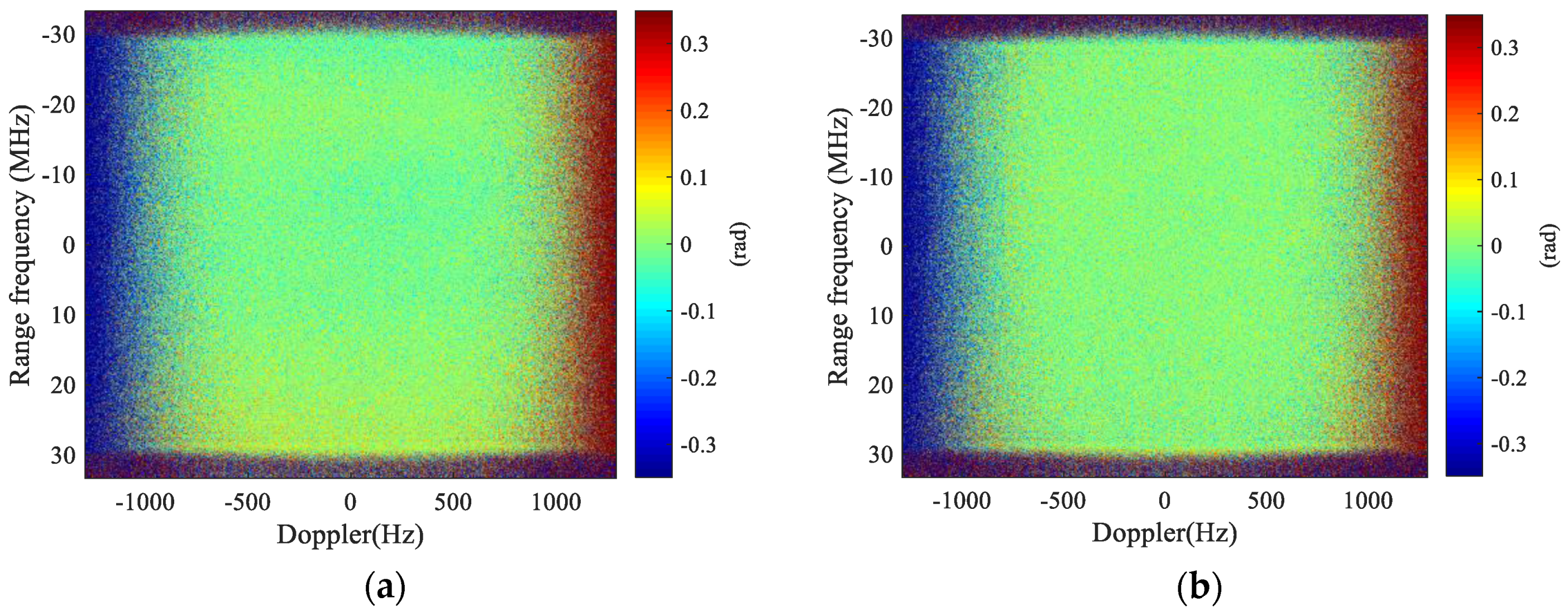
3.2. Imbalance Correction
3.3. Clutter Suppression
3.4. Moving Target Detection
3.5. Parameter Estimation
4. Results and Discussions
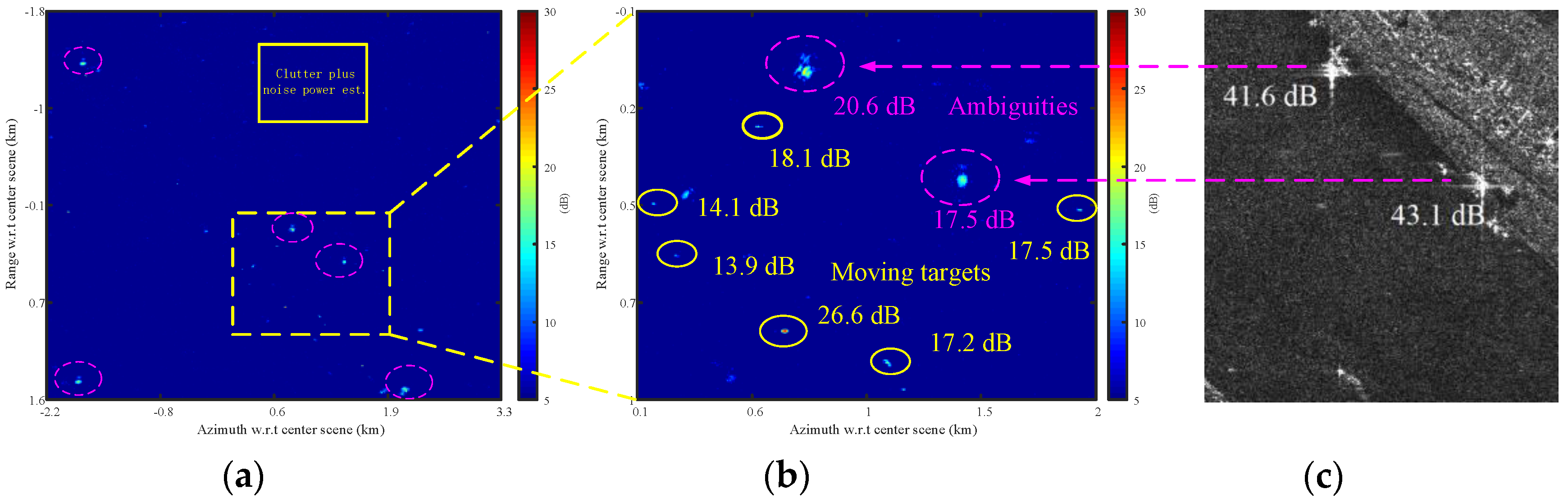
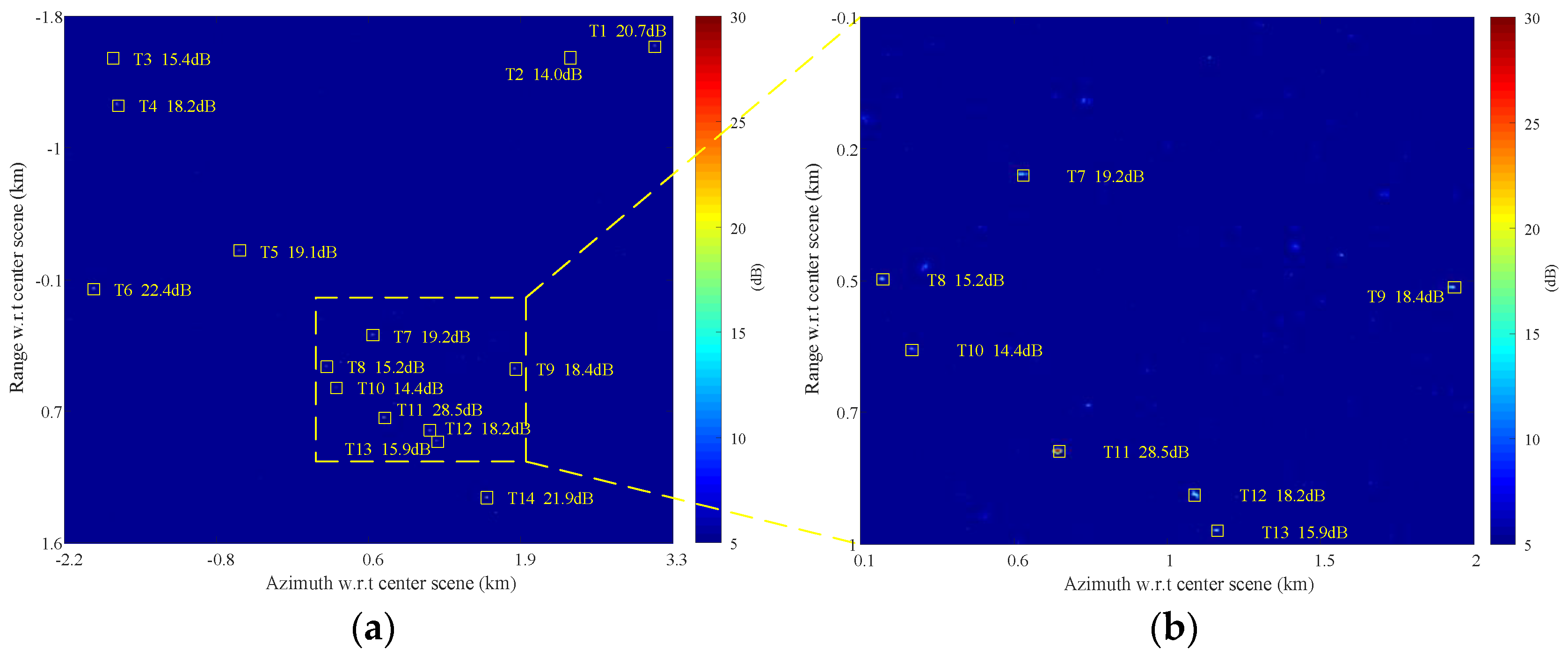
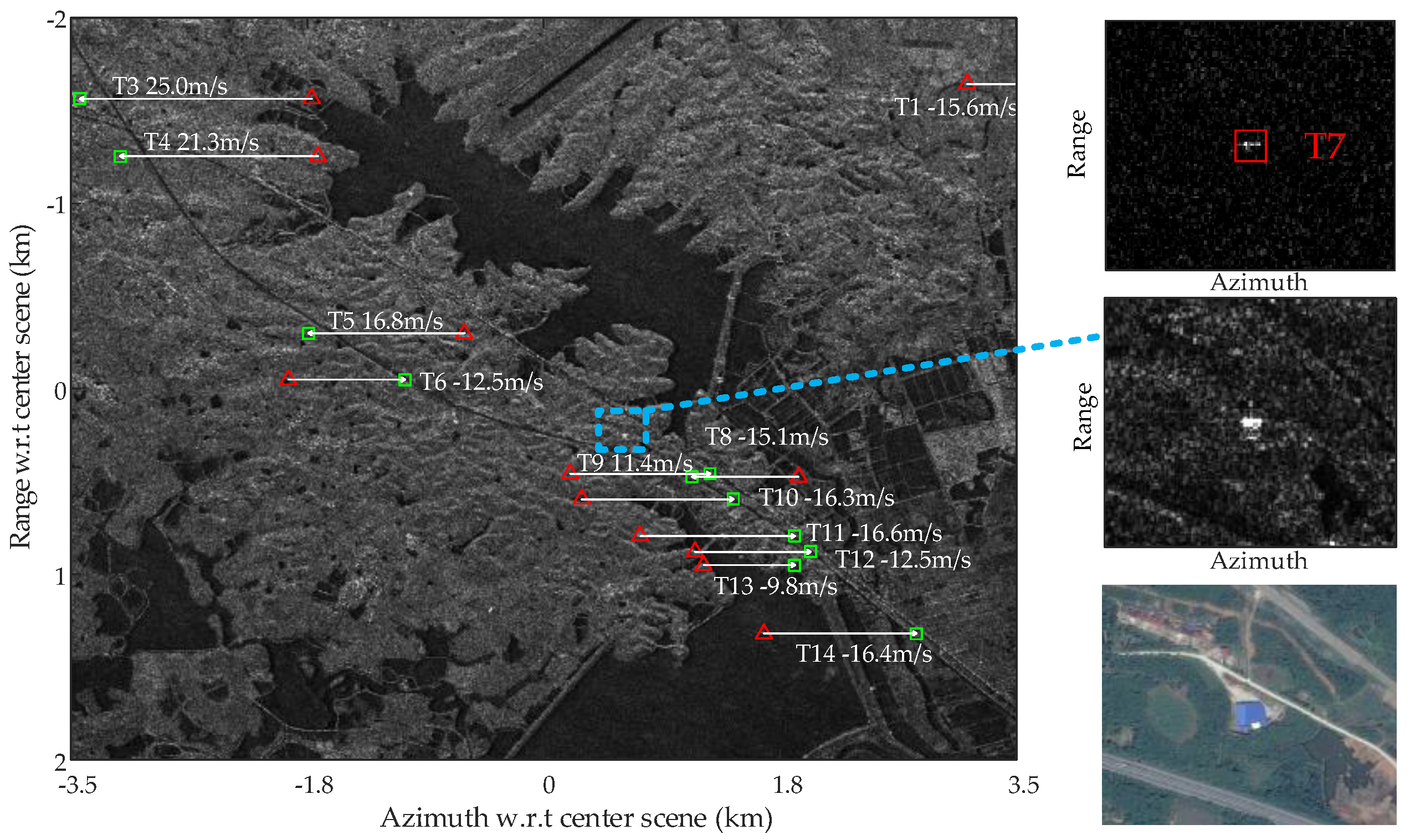
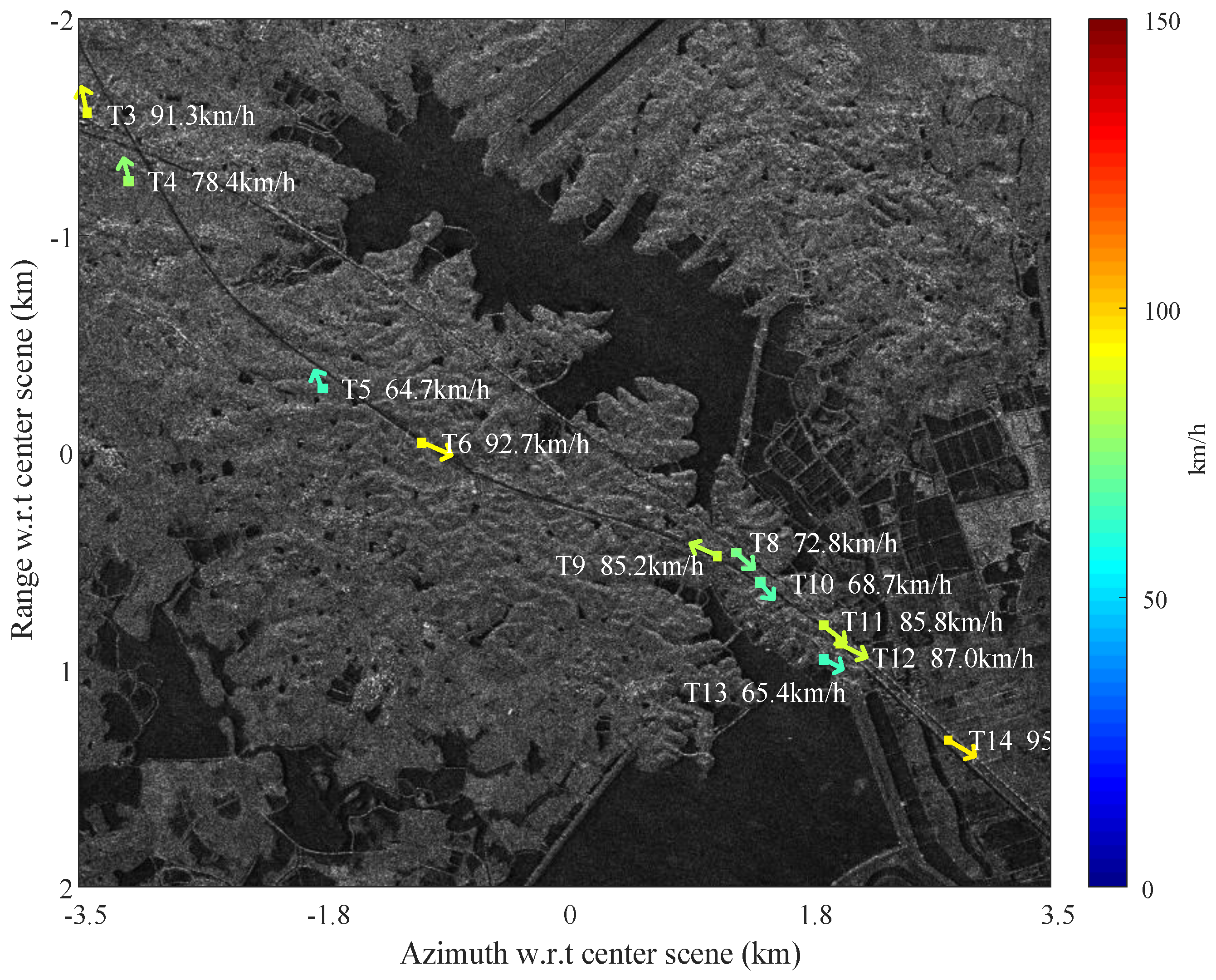
4.1. Overall SAR-GMTI Results for Gaofen-3
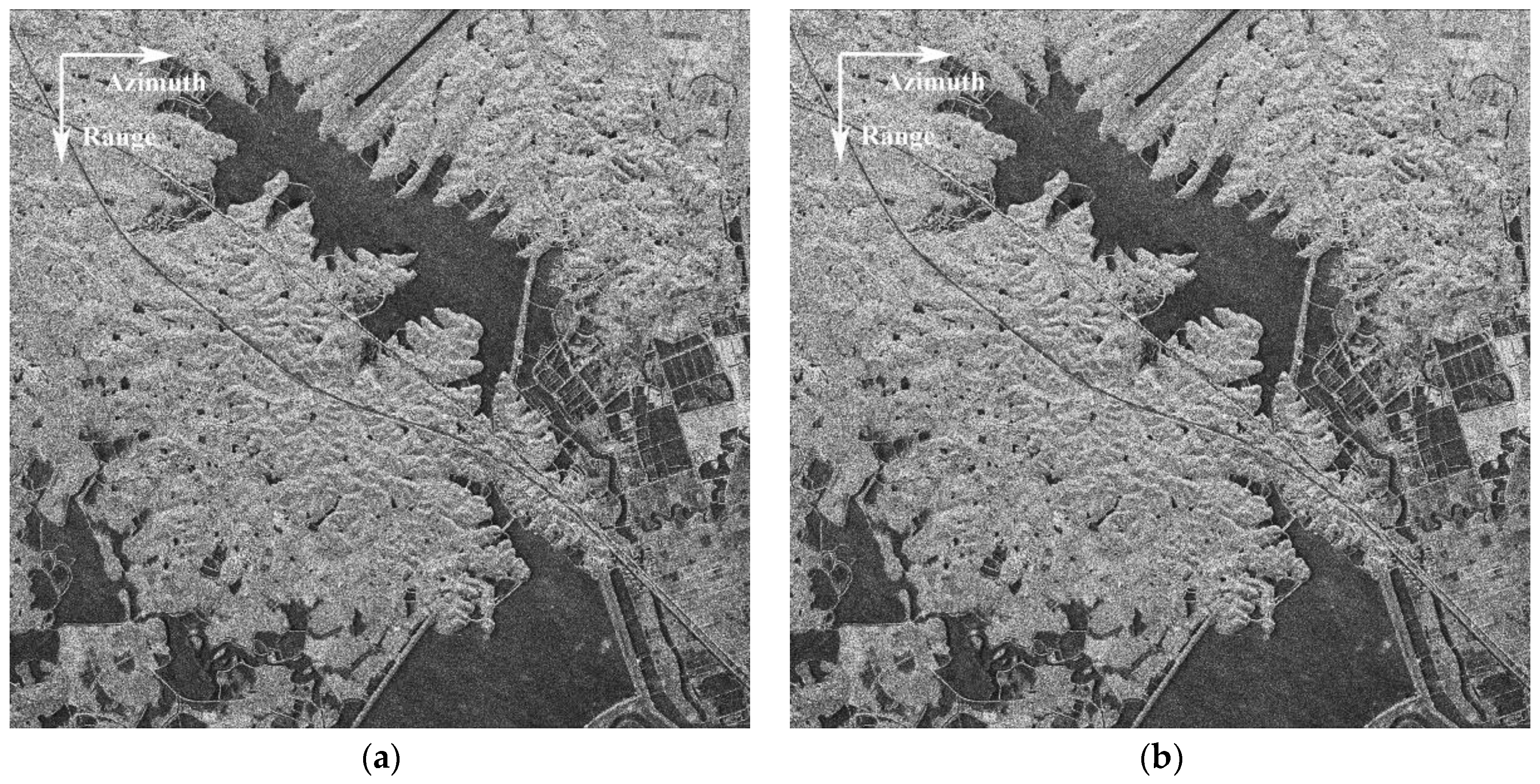
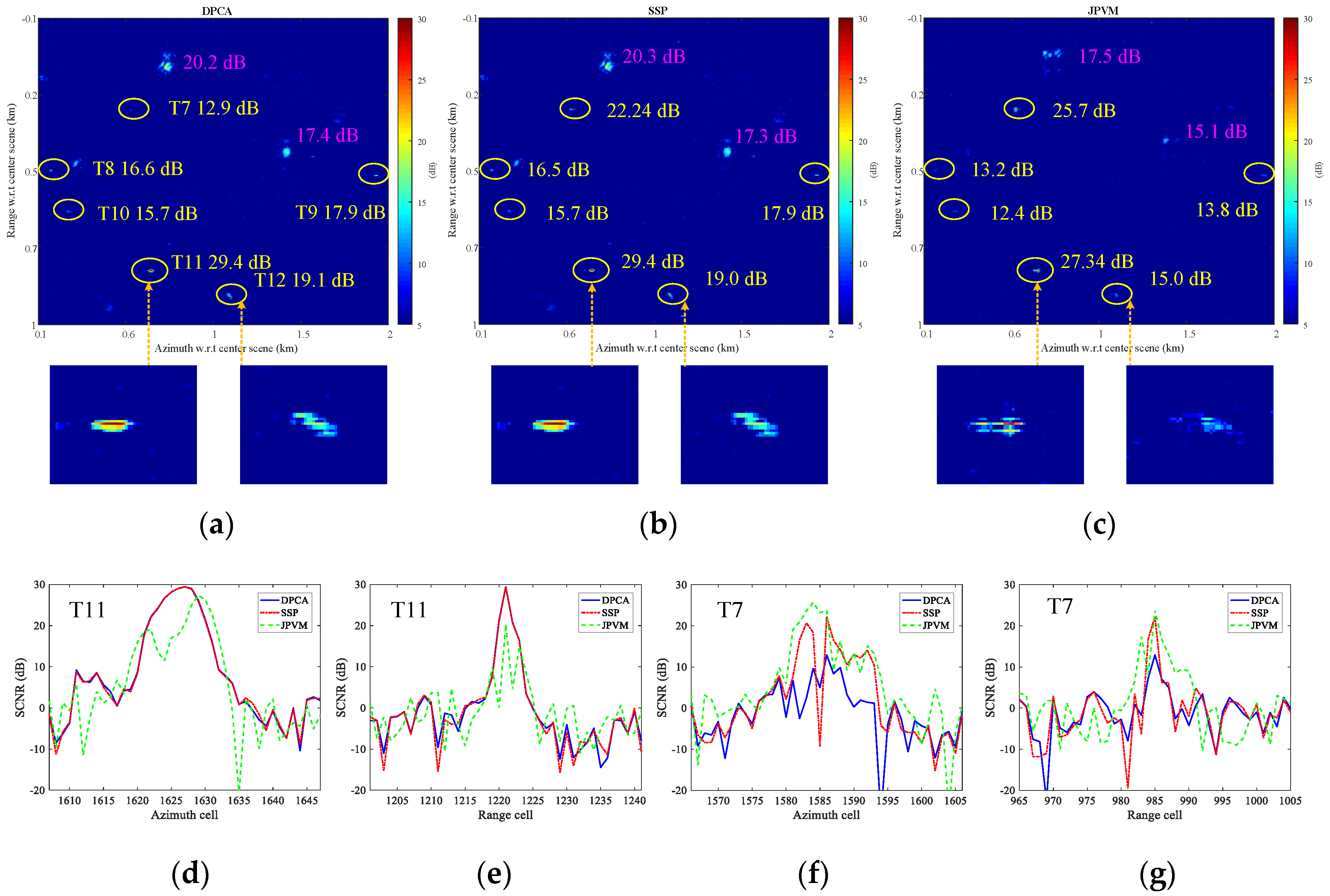
4.2. Discussion on Clutter Suppression
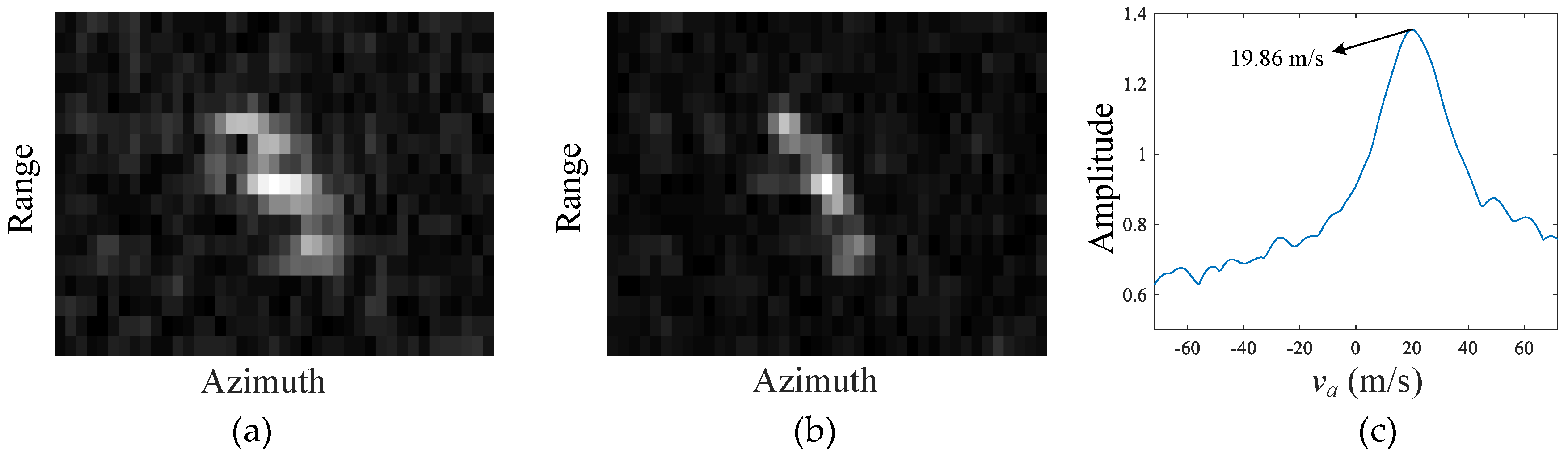
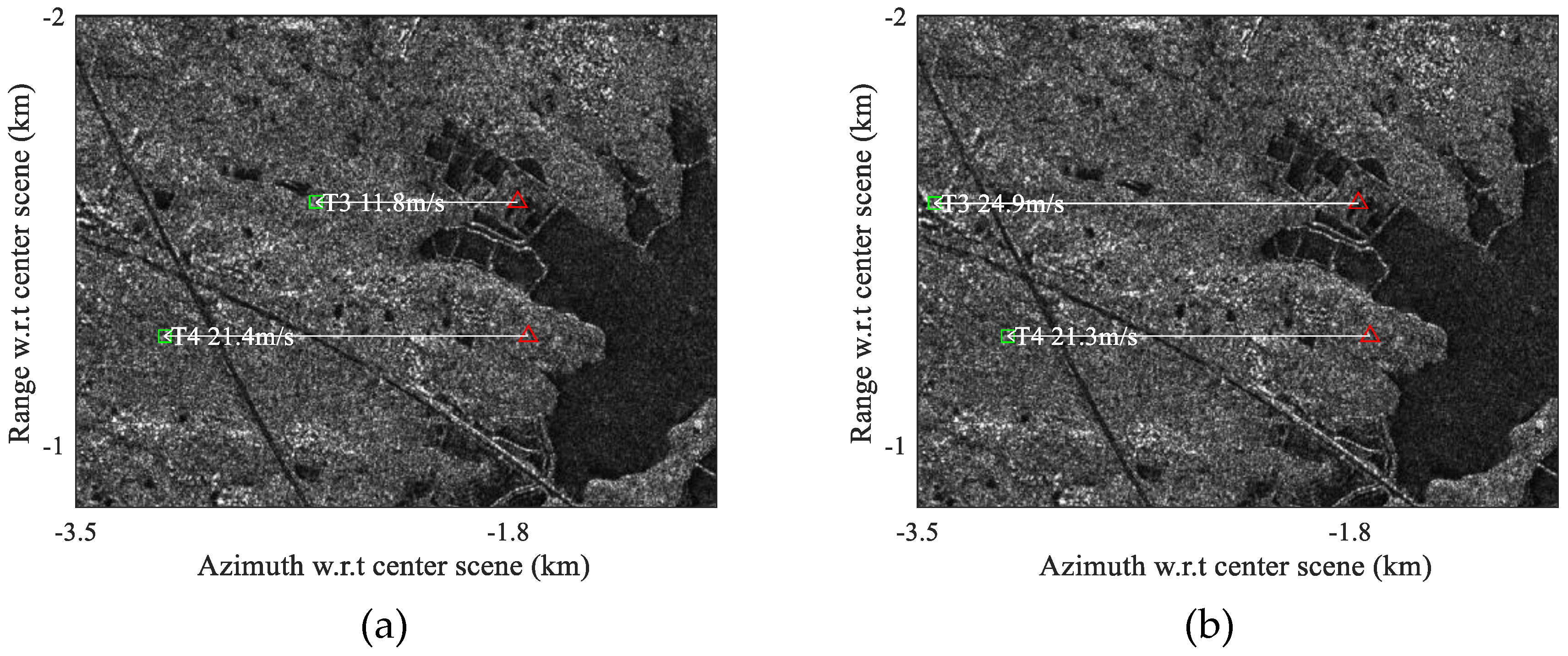
4.3. Discussion on Across-Track Velocity Estimation
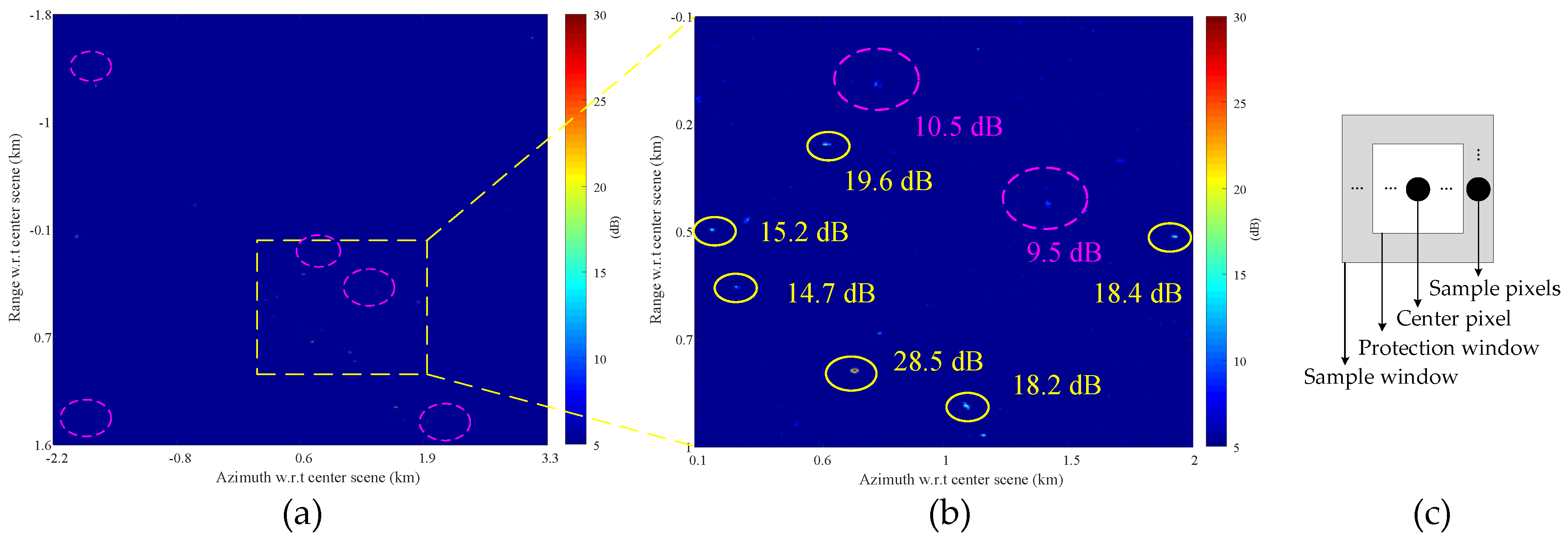
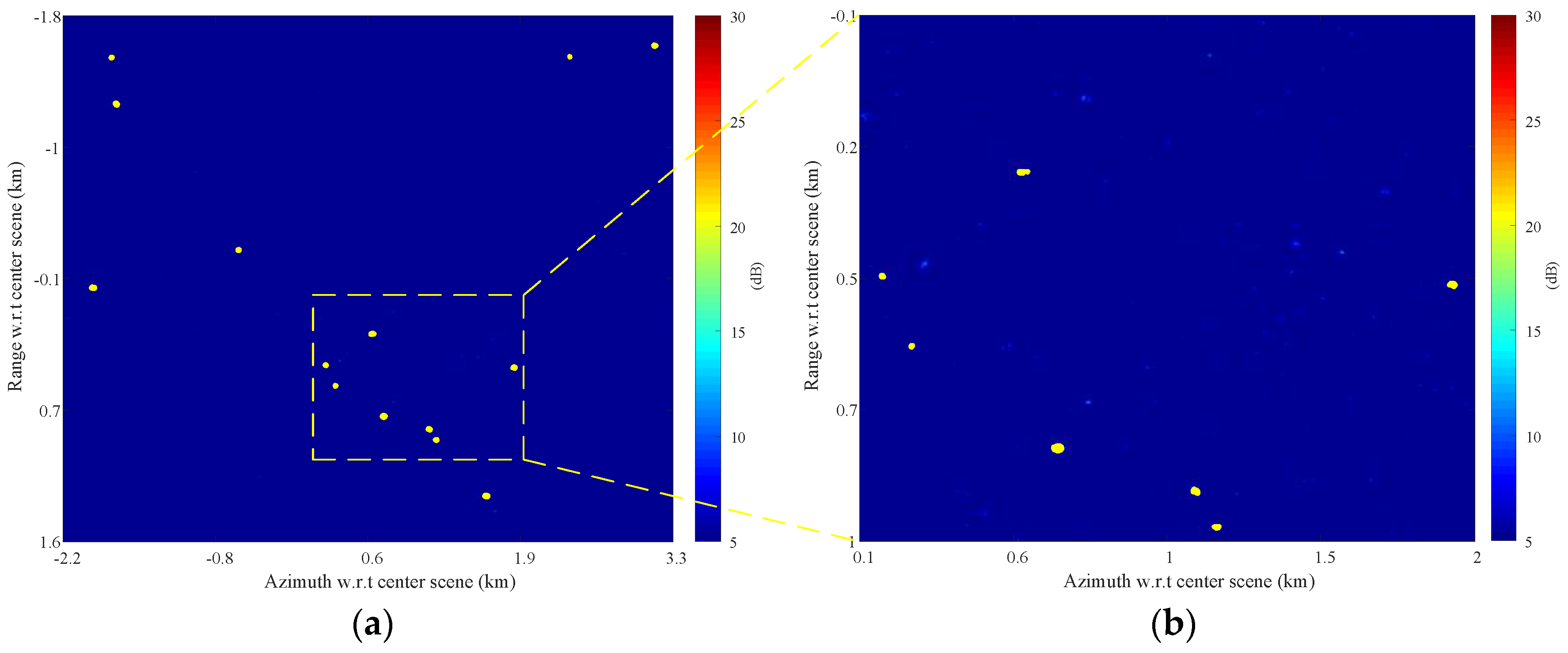
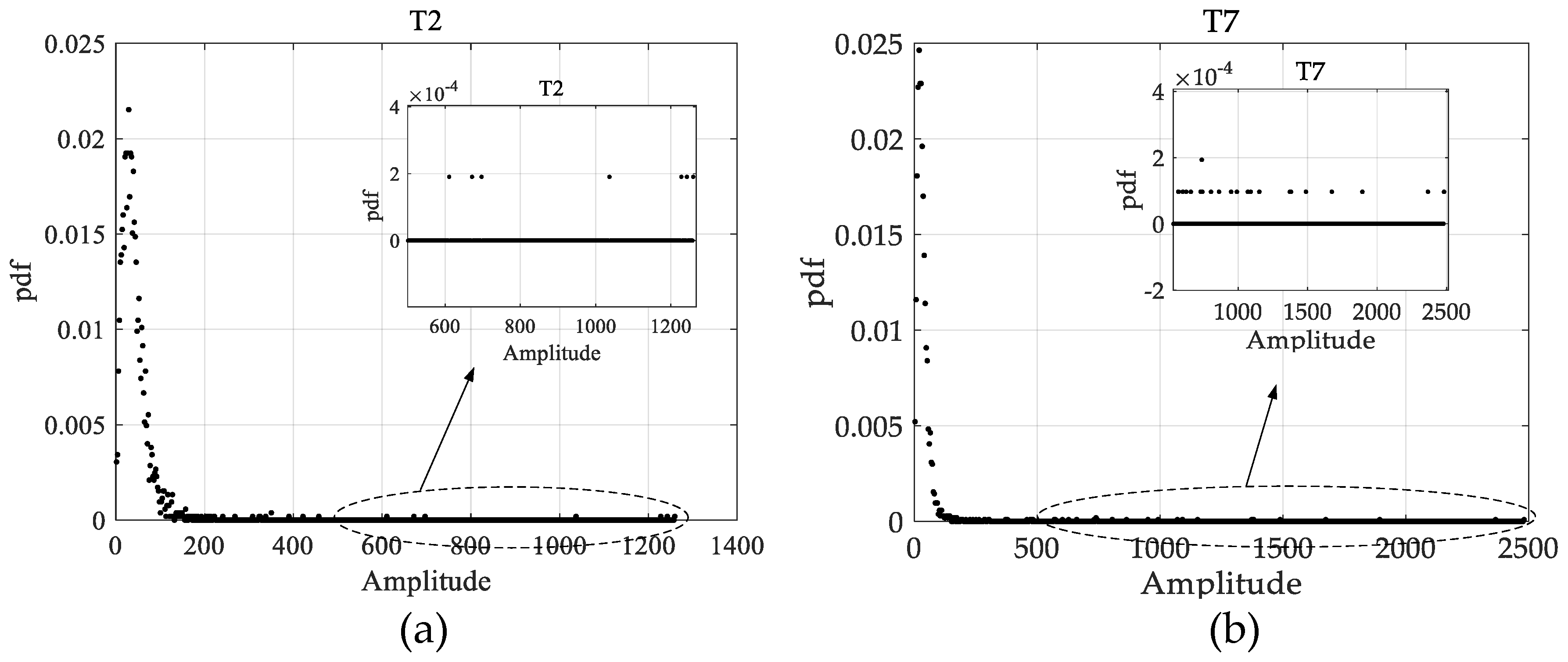
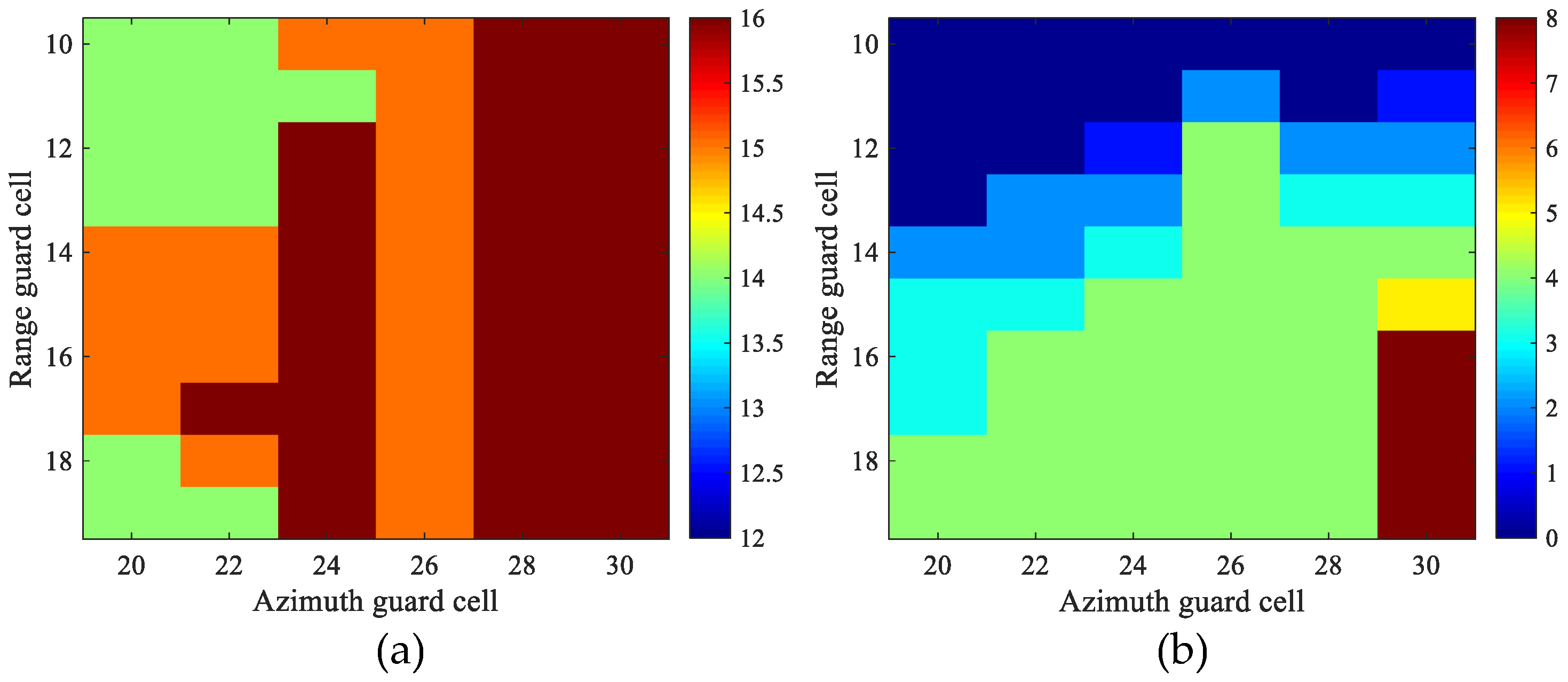
4.4. Discussion on CFAR Detection
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Suchandt, S.; Runge, H.; Breit, H.; Steinbrecher, U.; Kotenkov, A.; Balss, U. Automatic extraction of traffic flows using TerraSAR-X along-track interferometry. IEEE Trans. Geosci. Remote Sens. 2010, 48, 807–819. [Google Scholar] [CrossRef]
- Besson, O.; Gini, F.; Griffiths, H.D.; Lombardini, F. Estimating ocean surface velocity and coherence time using multichannel ATI-SAR systems. IEE Proc.-Radar Sonar Navig. 2000, 147, 299–308. [Google Scholar] [CrossRef]
- Makhoul, E.; Baumgartner, S.V.; Jager, M.; Broquetas, A. Multichannel SAR-GMTI in Maritime Scenarios With F-SAR and TerraSAR-X Sensors. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 5052–5067. [Google Scholar] [CrossRef]
- Makhoul, E.; Broquetas, A.; Ruiz-Rodon, J.; Zhan, Y.; Ceba, F. A performance evaluation of SAR-GMTI missions for maritime applications. IEEE Trans. Geosci. Remote Sens. 2015, 53, 2496–2509. [Google Scholar] [CrossRef]
- Adamiuk, G.; Heer, C.; Ludwig, M. DBF Technology Development for Next Generation of ESA C-Band SAR mission. In Proceedings of the 11th European Conference on Synthetic Aperture Radar (EUSAR), Hamburg, Germany, 6–9 June 2016; pp. 1–4. [Google Scholar]
- Baumgartner, S.V.; Krieger, G. Fast GMTI algorithm for traffic monitoring based on a priori knowledge. IEEE Trans. Geosci. Remote Sens. 2010, 50, 4626–4641. [Google Scholar] [CrossRef] [Green Version]
- Krieger, G.; Gebert, N.; Younis, M.; Moreira, A. Advanced synthetic aperture radar based on digital beamforming and waveform diversity. In Proceedings of the Radar Conference, RADAR′08, Rome, Italy, 26–30 May 2008; pp. 1–6. [Google Scholar]
- Suwa, K.; Yamamoto, K.; Tsuchida, M.; Nakamura, S.; Wakayama, T.; Hara, T. Image-Based Target Detection and Radial Velocity Estimation Methods for Multichannel SAR-GMTI. IEEE Trans. Geosci. Remote Sens. 2017, 55, 1325–1338. [Google Scholar] [CrossRef]
- Melvin, W.L. A stap overview. IEEE Aerosp. Electron. Syst. Mag. 2004, 19, 19–35. [Google Scholar] [CrossRef]
- Ender, J.H. Space-time processing for multichannel synthetic aperture radar. Electron. Commun. Eng. J. 1999, 11, 29–38. [Google Scholar] [CrossRef]
- Klemm, R. Principles of Space-Time Adaptive Processing; IEE Publishers: London, UK, 2002. [Google Scholar]
- Cerutti-Maori, D.; Sikaneta, I. Optimum GMTI processing for space-based SAR/GMTI systems-theoretical derivation. In Proceedings of the EUSAR 2010: 8th European Conference on Synthetic Aperture Radar, Aachen, Germany, 7–10 June 2010; pp. 1–4. [Google Scholar]
- Cerutti-Maori, D.; Sikaneta, I.; Gierull, C.H. Optimum SAR/GMTI processing and its application to the radar satellite RADARSAT-2 for traffic monitoring. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3868–3881. [Google Scholar] [CrossRef]
- DiPietro, R.C. Extended factored space-time processing for airborne radar systems. In Proceedings of the 1992 Conference Record of the Twenty-Sixth Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 26–28 October 1992; pp. 425–430. [Google Scholar]
- Gierull, C.H. Statistical analysis of multilook SAR interferograms for CFAR detection of ground moving targets. IEEE Trans. Geosci. Remote Sens. 2004, 42, 691–701. [Google Scholar] [CrossRef]
- Gierull, C.H.; Sikaneta, I.; Cerutti-Maori, D. Two-step detector for RADARSAT-2’s experimental GMTI mode. IEEE Trans. Geosci. Remote Sens. 2013, 51, 436–454. [Google Scholar] [CrossRef]
- Lightstone, L.; Faubert, D.; Rempel, G. Multiple phase centre DPCA for airborne radar. In Proceedings of the 1991 IEEE National Radar Conference, New York, NY, USA, 12–13 March 1991; pp. 36–40. [Google Scholar]
- Cerutti-Maori, D.; Sikaneta, I. A Generalization of DPCA Processing for Multichannel SAR/GMTI Radars. IEEE Trans. Geosci. Remote Sens. 2013, 51, 560–572. [Google Scholar] [CrossRef]
- Dragosevic, M.V.; Burwash, W.; Chiu, S. Detection and estimation with RADARSAT-2 moving-object detection experiment modes. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3527–3543. [Google Scholar] [CrossRef]
- Soumekh, M. Signal subspace fusion of uncalibrated sensors with application in SAR and diagnostic medicine. IEEE Trans. Image Process. 1999, 8, 127–137. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Bao, Z.; Li, H.; Liao, G. Image auto-coregistration and InSAR interferogram estimation using joint subspace projection. IEEE Trans. Geosci. Remote Sens. 2006, 44, 288–297. [Google Scholar]
- Suo, Z.; Li, Z.; Bao, Z. Multi-channel SAR-GMTI method robust to coregistration error of SAR images. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 2035–2043. [Google Scholar] [CrossRef]
- Liu, X.; Meng, J.; Lin, H.; Li, X.; Zhao, H. A comparison to joint pixel vector methods for clutter suppression in SAR-GMTI system. In Proceedings of the 12th International Conference on Signal Processing (ICSP), Hangzhou, China, 19–23 October 2014; pp. 2039–2043. [Google Scholar]
- Melvin, W.L. Space-time adaptive radar performance in heterogeneous clutter. IEEE Trans. Aerosp. Electron. Syst. 2000, 36, 621–633. [Google Scholar] [CrossRef]
- Gierull, C.H. Digital Channel Balancing of Along-Track Interferometric SAR Data; Technical Report TM-2003-024; Defence R&D Canada-Ottawa: Ottawa, ON, Canada, 2003.
- Yan, H.; Wang, R.Y.; Gao, C.; Liu, Y.B.; Zheng, M.; Deng, Y. Channel balancing algorithm in multichannel wide-area surveillance systems. IET Radar Sonar Navig. 2014, 8, 27–36. [Google Scholar] [CrossRef]
- Bertetich, A. Investigation of Multi-Channel SAR Calibration Methods for Real-Time Traffic Monitoring. Master’s Thesis, University of Trento, Trento, Italy, 2010. [Google Scholar]
- Cerutti-Maori, D.; Sikaneta, I.; Gierull, C.H. Comparison of the GMTI Capability of RADARSAT-2 MODEX-1 and MODEX-2 Modes—Optimum Signal Processing and Theoretical Investigation of the GMTI Performance; Techical Report TR-2010-270; DRDC: Ottawa, ON, Canada, 2017.
- Zhang, Q.J. System design and key technologies of the GF-3 satellite. Acta Geod. Cartogr. Sin. 2017, 46, 269–277. [Google Scholar]
- Sun, J.; Yu, W.; Deng, Y. The SAR payload design and performance for the GF-3 mission. Sensors 2017, 17, 2419. [Google Scholar] [CrossRef] [PubMed]
- Wang, T.; Zhang, G.; Yu, L.; Zhao, R.; Deng, M.; Xu, K. Multi-mode GF-3 satellite image geometric accuracy verification using the RPC model. Sensors 2017, 17, 2005. [Google Scholar] [CrossRef] [PubMed]
- Zhao, R.; Zhang, G.; Deng, M.; Xu, K.; Guo, F. Geometric calibration and accuracy verification of the GF-3 satellite. Sensors 2017, 19, 1977. [Google Scholar] [CrossRef] [PubMed]
- Jin, T.; Qiu, X.; Hu, D.; Ding, C. Unambiguous Imaging of Static Scenes and Moving Targets with the First Chinese Dual-Channel Spaceborne SAR Sensor. Sensors 2017, 17, 1709. [Google Scholar] [CrossRef] [PubMed]
- Sharma, J.J.; Gierull, C.H.; Collins, M.J. The influence of target acceleration on velocity estimation in dual-channel SAR-GMTI. IEEE Trans. Geosci. Remote Sens. 2006, 44, 134–147. [Google Scholar] [CrossRef]
- Robey, F.C.; Fuhrmann, D.R.; Kelly, E.J.; Nitzberg, R. A CFAR adaptive matched filter detector. IEEE Trans. Aerosp. Electron. Syst. 1992, 28, 208–216. [Google Scholar] [CrossRef]
- Gabele, M.; Brautigam, B.; Schulze, D.; Steinbrecher, U.; Tous-Ramon, N.; Younis, M. Fore and AFT channel reconstruction in the TerraSAR-X dual receive antenna mode. IEEE Trans. Geosci. Remote Sens. 2010, 48, 795–806. [Google Scholar] [CrossRef] [Green Version]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Parameter | Value |
|---|---|---|
| λ | Wavelength | 0.056 m |
| Vs | Satellite Velocity | 7569.5 m/s |
| θL | Look Angle | 30.77° |
| Bw | Bandwidth | 60 MHz |
| fs | Sampling Rate | 66.66 MHz |
| Bx | Along-track Baseline | 3.75 m |
| fprf | PRF | 2588.57 Hz |
| Bd | Doppler Bandwidth | 1482.3 Hz |
| Targets | Est. Across-Track Ground Velocity (m/s) | Est. Ground-Truth (m/s) | Err (m/s) | SCNRin (dB) | SCNRout (dB) | IF (dB) |
|---|---|---|---|---|---|---|
| T1 | −15.59 | −16.14 | 0.54 | 12.02 | 20.74 | 8.72 |
| T2* | −0.13 | - | - | 26.50 | 13.96 | −12.54 |
| T3 | 24.95 | 22.15 | 2.8 | 3.45 | 15.36 | 11.91 |
| T4 | 21.30 | 18.77 | 2.53 | 10.94 | 18.25 | 7.31 |
| T5 | 16.81 | 14.37 | 2.44 | 7.84 | 19.06 | 11.22 |
| T6 | −12.51 | −12.54 | 0.02 | 19.85 | 22.45 | 2.6 |
| T7* | 0.18 | - | - | 31.78 | 19.21 | −12.57 |
| T8 | −15.05 | −11.77 | −3.28 | 6.67 | 15.24 | 8.57 |
| T9 | 11.43 | 11.93 | −0.50 | 10.21 | 18.16 | 7.85 |
| T10 | −16.32 | −15.88 | 0.44 | 7.77 | 14.36 | 6.59 |
| T11 | −16.58 | −16.10 | −0.49 | 18.76 | 28.49 | 9.73 |
| T12 | −12.45 | −12.56 | −0.11 | 11.76 | 18.23 | 6.478 |
| T13 | −9.78 | −13.24 | 3.45 | 10.05 | 15.87 | 5.82 |
| T14 | −16.40 | −15.72 | −0.68 | 18.06 | 21.85 | 3.79 |
| Ambiguities/Targets | Azimuth Guard Cells | ||||||
|---|---|---|---|---|---|---|---|
| 20 | 22 | 24 | 26 | 28 | 30 | ||
| Range Guard Cells | 10 | 0/14 | 0/14 | 0/15 | 0/15 | 0/16 | 0/16 |
| 11 | 0/14 | 0/14 | 0/14 | 2/15 | 0/16 | 1/16 | |
| 12 | 0/14 | 0/14 | 1/16 | 4/15 | 2/16 | 2/16 | |
| 13 | 0/14 | 2/14 | 2/16 | 4/15 | 3/16 | 3/16 | |
| 14 | 2/15 | 2/15 | 3/16 | 4/15 | 4/16 | 4/16 | |
| 15 | 3/15 | 3/15 | 4/16 | 4/15 | 4/16 | 5/16 | |
| 16 | 3/15 | 4/15 | 4/16 | 4/15 | 4/16 | 8/16 | |
| 17 | 3/15 | 4/16 | 4/16 | 4/15 | 4/16 | 8/16 | |
| 18 | 4/14 | 4/15 | 4/16 | 4/15 | 4/16 | 8/16 | |
| 19 | 4/14 | 4/14 | 4/16 | 4/15 | 4/16 | 8/16 | |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, C.; Liao, G.; Zhang, Q. First Spaceborne SAR-GMTI Experimental Results for the Chinese Gaofen-3 Dual-Channel SAR Sensor. Sensors 2017, 17, 2683. https://doi.org/10.3390/s17112683
Wang C, Liao G, Zhang Q. First Spaceborne SAR-GMTI Experimental Results for the Chinese Gaofen-3 Dual-Channel SAR Sensor. Sensors. 2017; 17(11):2683. https://doi.org/10.3390/s17112683
Chicago/Turabian StyleWang, Chenghao, Guisheng Liao, and Qingjun Zhang. 2017. "First Spaceborne SAR-GMTI Experimental Results for the Chinese Gaofen-3 Dual-Channel SAR Sensor" Sensors 17, no. 11: 2683. https://doi.org/10.3390/s17112683
APA StyleWang, C., Liao, G., & Zhang, Q. (2017). First Spaceborne SAR-GMTI Experimental Results for the Chinese Gaofen-3 Dual-Channel SAR Sensor. Sensors, 17(11), 2683. https://doi.org/10.3390/s17112683