
Replacement Condition Detection of Railway Point Machines Using an Electric Current Sensor

 ,
, 
Abstract
:1. Introduction
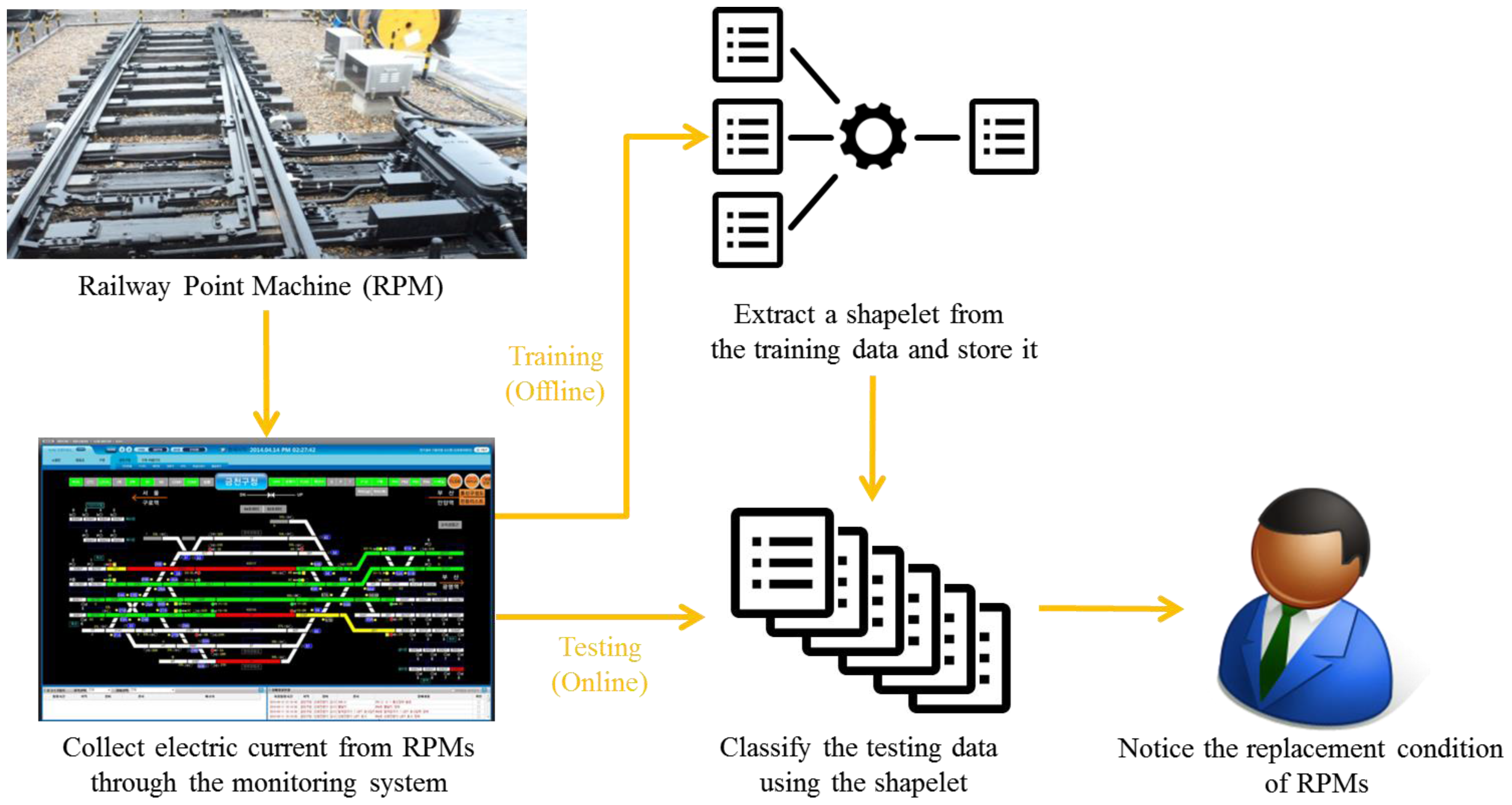
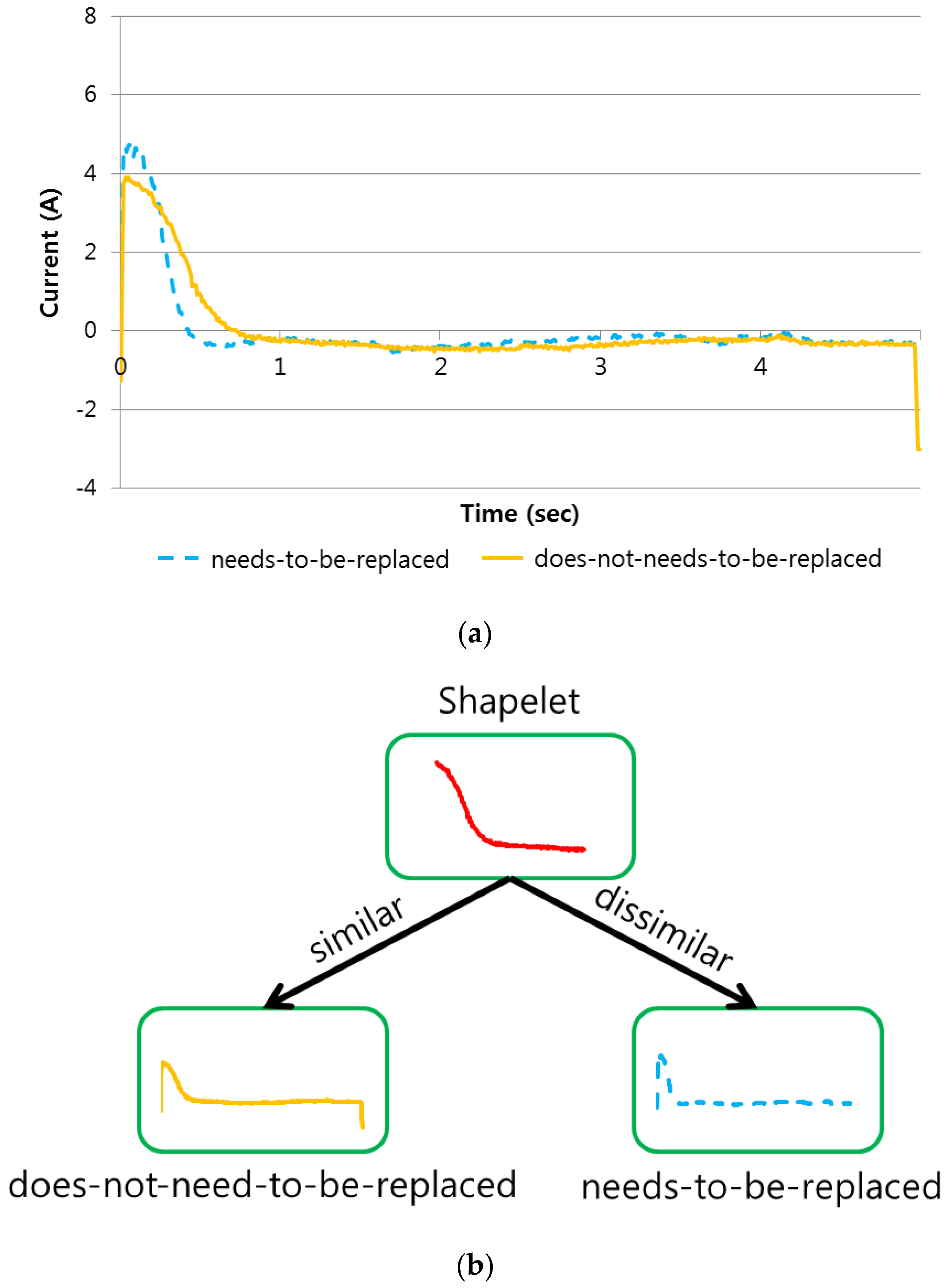
2. Method for Detecting Replacement Condition
3. Experimental Results
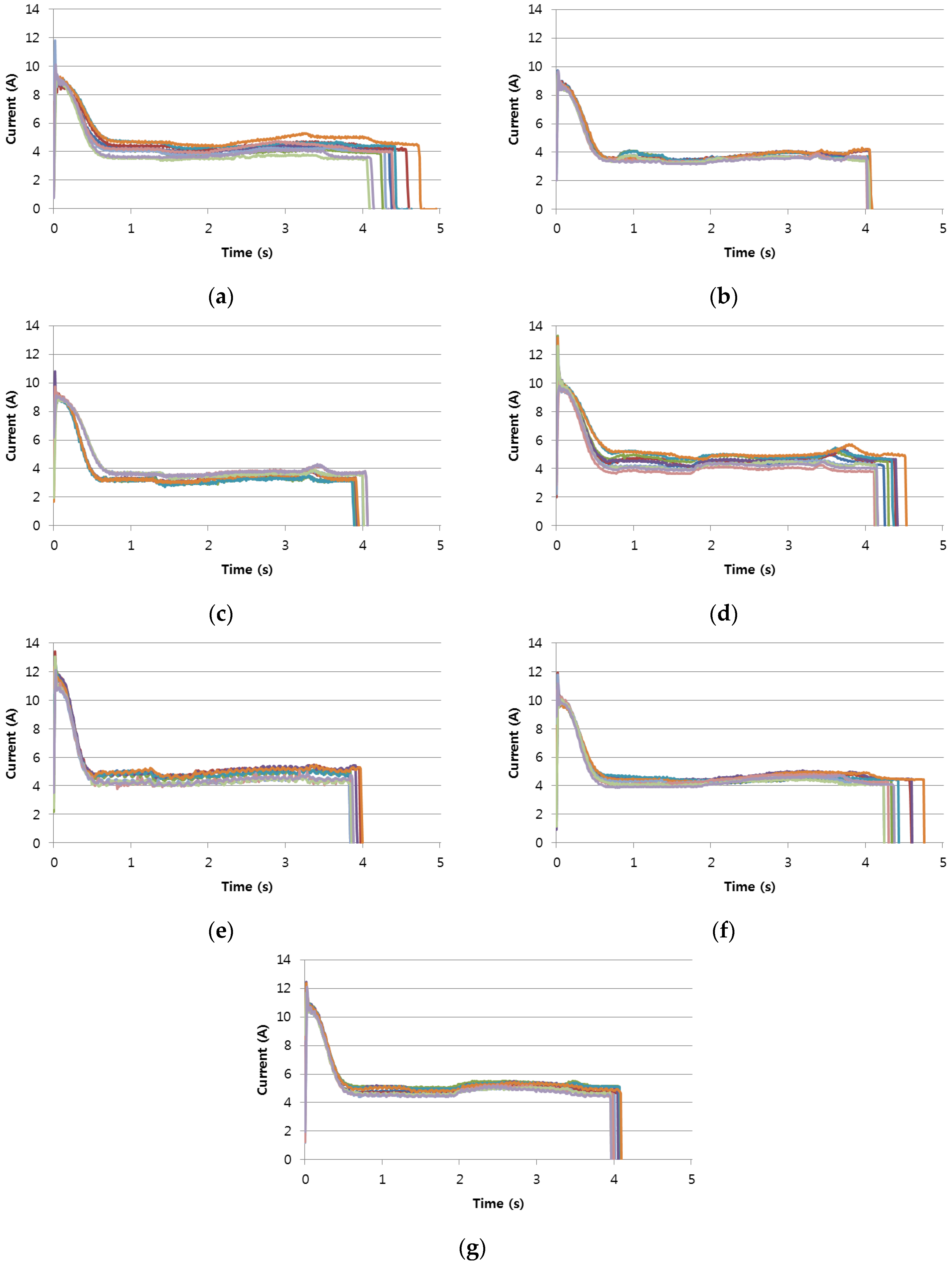
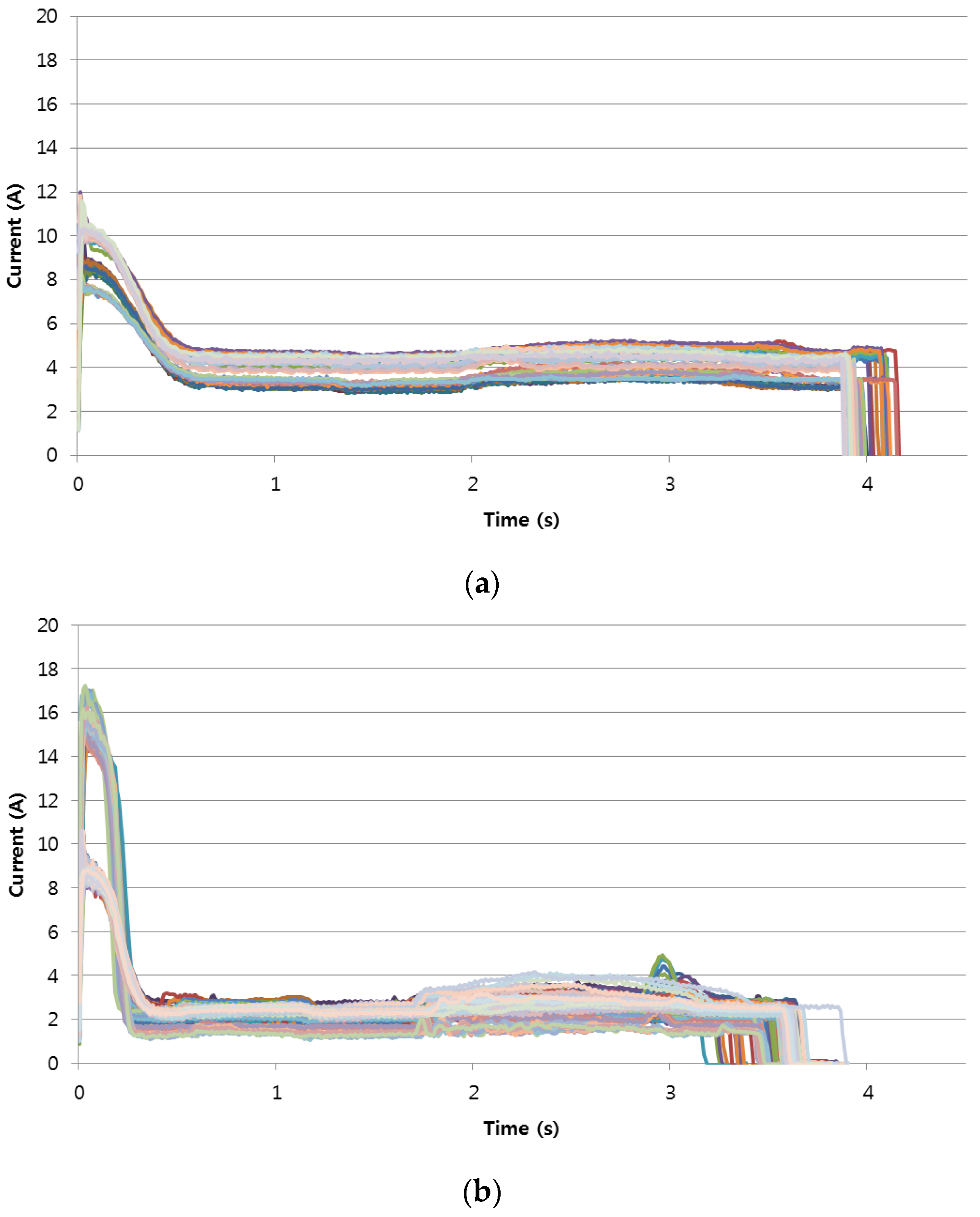
3.1. Experimental Data
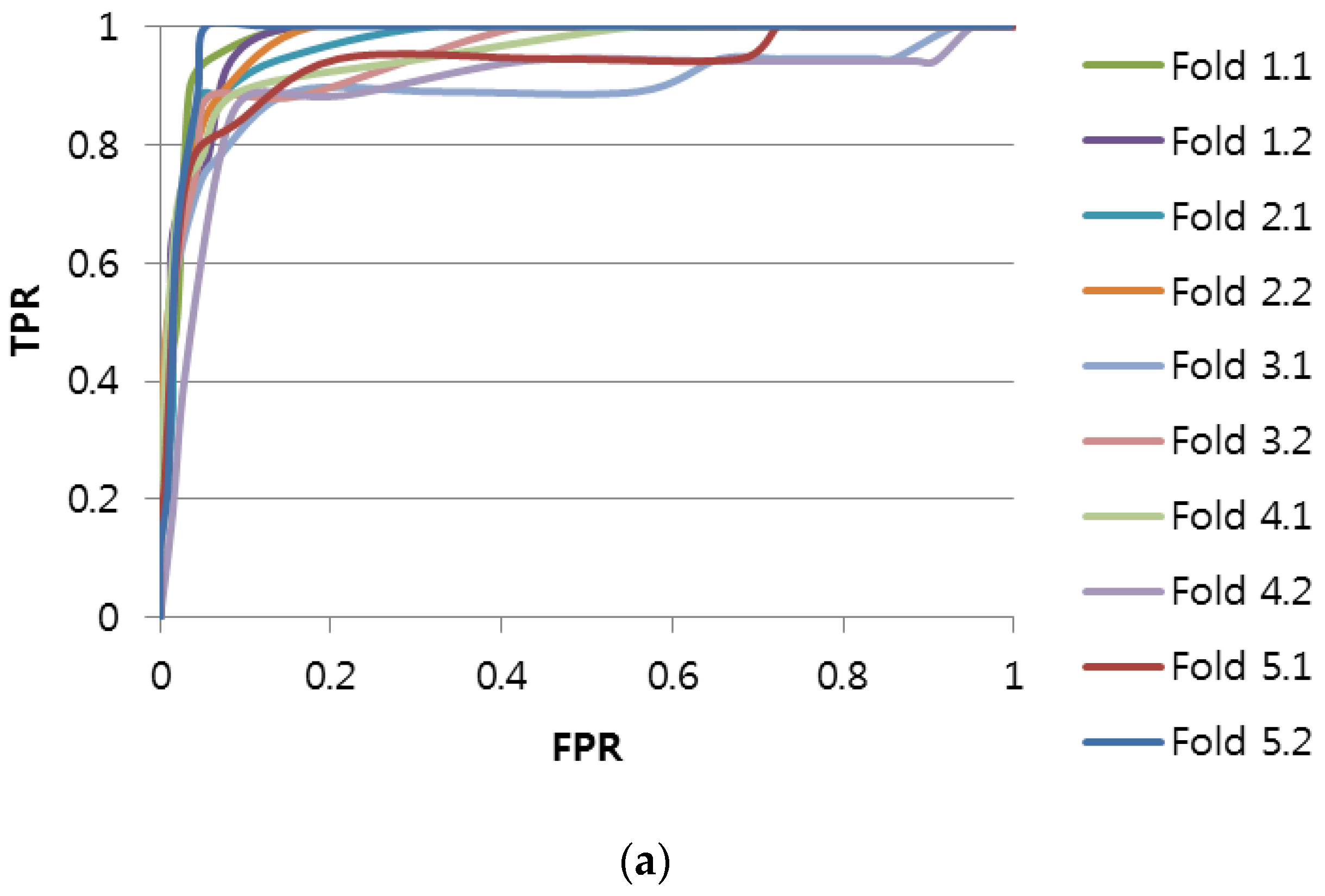
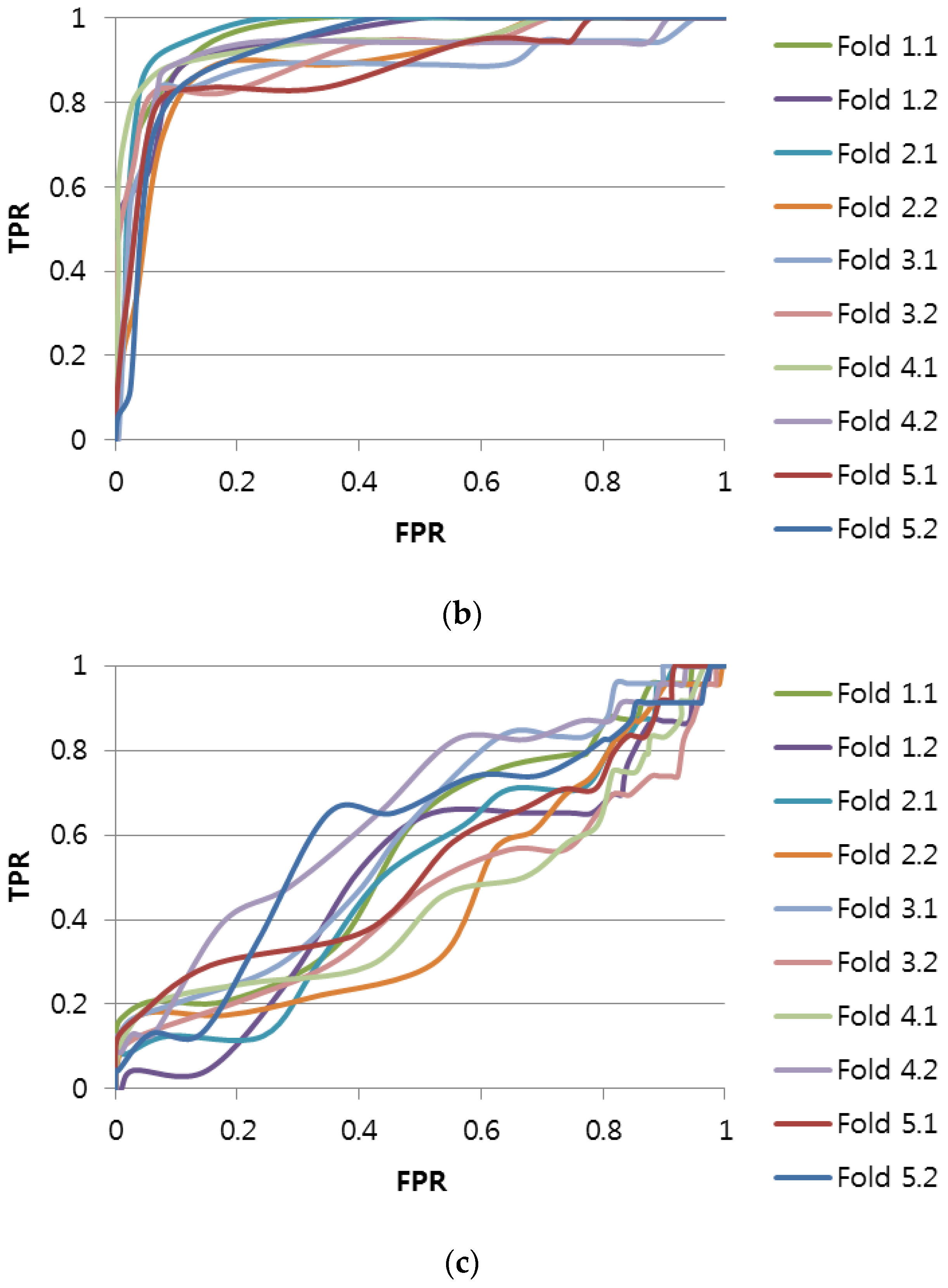
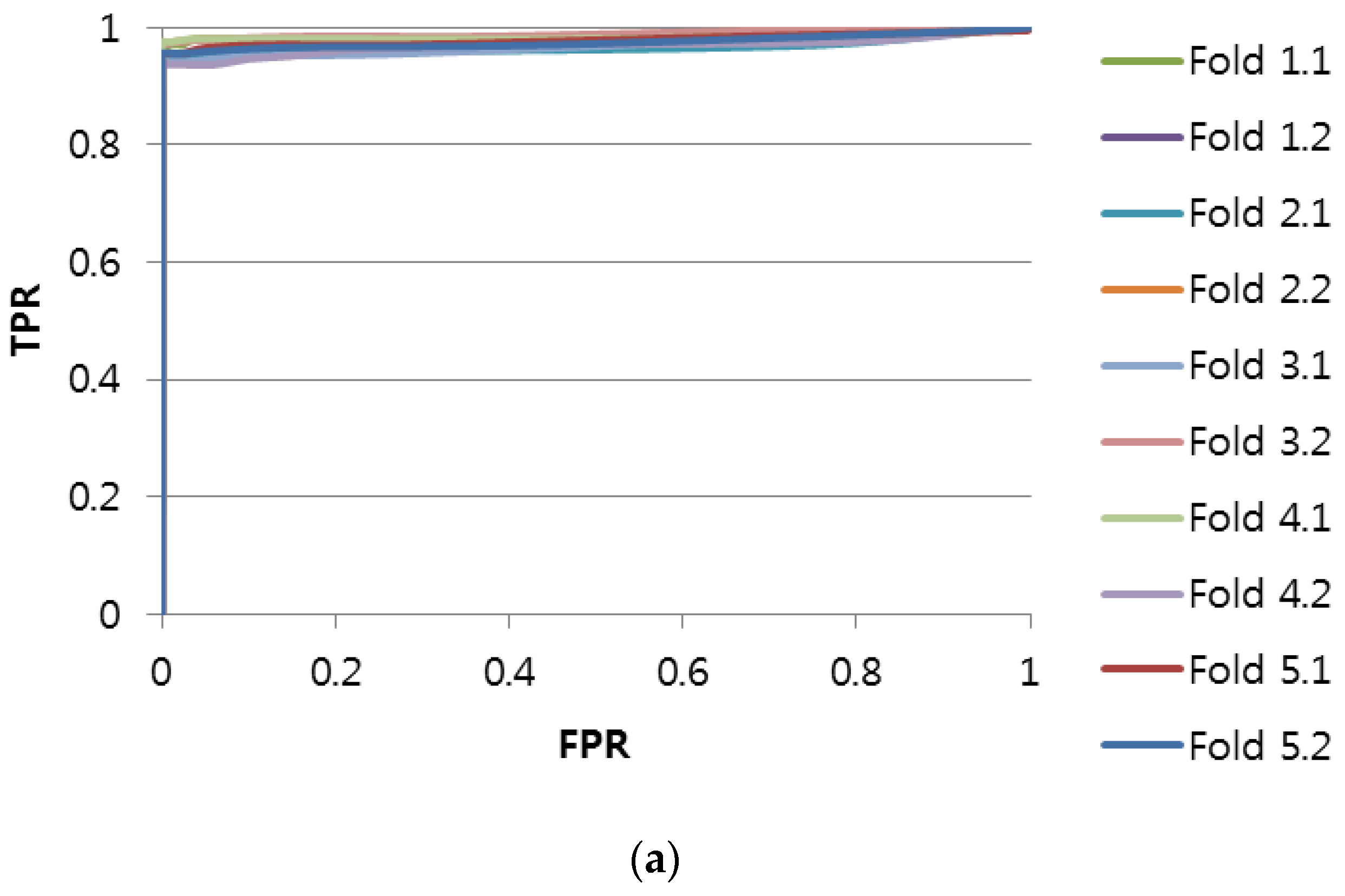
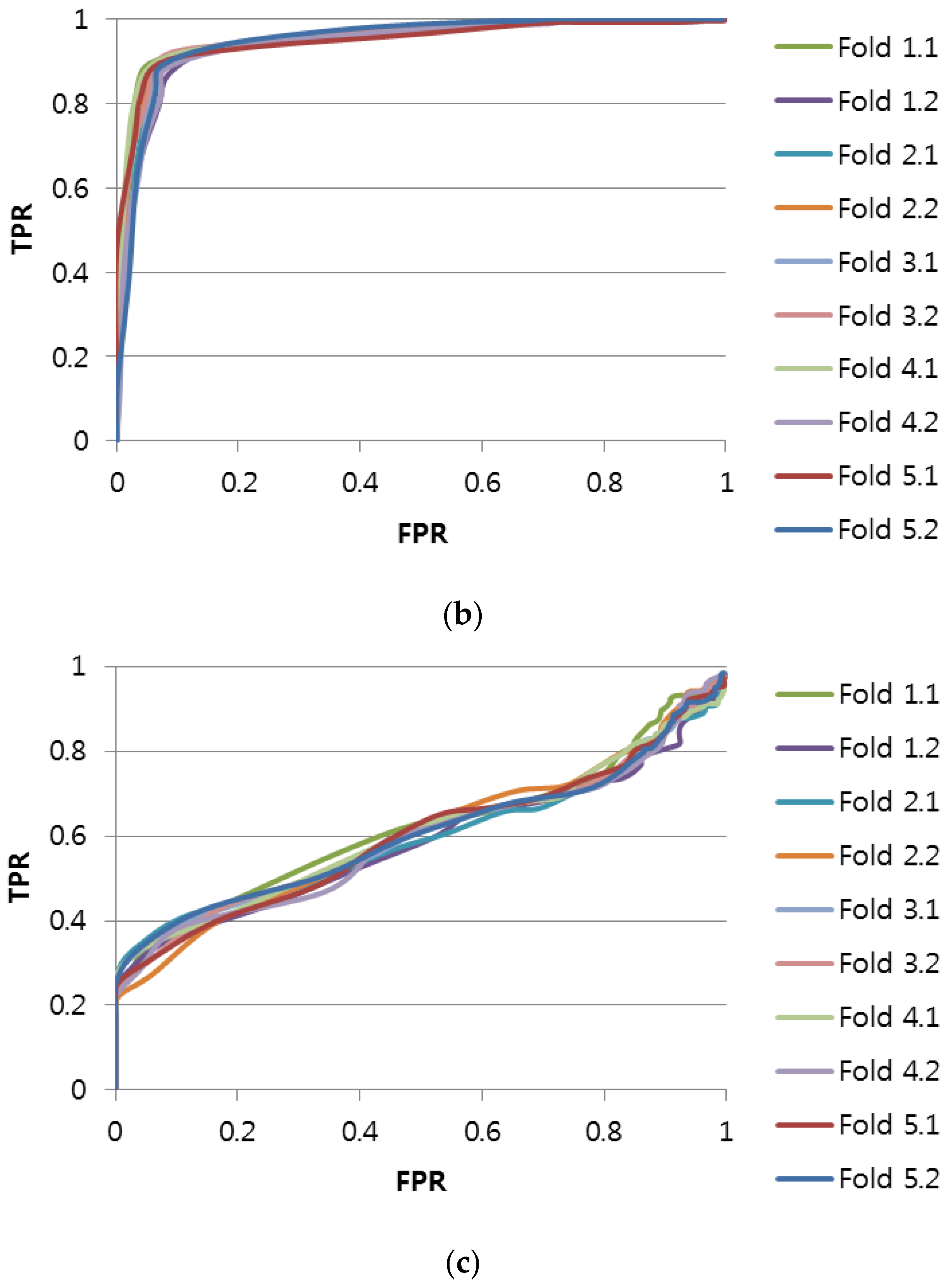
3.2. Classification Results
3.3. Discussion
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Yin, S.; Ding, S.X.; Zhou, D. Diagnosis and Prognosis for Complicated Industrial Systems—Part 1. IEEE Trans. Ind. Electron. 2016, 63, 2501–2505. [Google Scholar] [CrossRef]
- Yin, S.; Ding, S.X.; Zhou, D. Diagnosis and Prognosis for Complicated Industrial Systems—Part 2. IEEE Trans. Ind. Electron. 2016, 63, 3201–3204. [Google Scholar] [CrossRef]
- Wang, H.; Ke, Y.; Song, L.; Tang, G.; Chen, P. A Sparsity-Promoted Decomposition for Compressed Fault Diagnosis of Roller Bearings. Sensors 2016, 16, 1524. [Google Scholar] [CrossRef] [PubMed]
- Cerrada, M.; Sánchez, R.V.; Cabrera, D.; Zurita, G.; Li, C. Multi-Stage Feature Selection by Using Genetic Algorithms for Fault Diagnosis in Gearboxes Based on Vibration Signal. Sensors 2015, 15, 23903–23926. [Google Scholar] [CrossRef] [PubMed]
- Santos, P.; Villa, L.F.; Reñones, A.; Bustillo, A.; Maudes, J. An SVM-based Solution for Fault Detection in Wind Turbines. Sensors 2015, 15, 5627–5648. [Google Scholar] [CrossRef] [PubMed]
- Zhou, J.H.; Pang, C.K.; Lewis, F.L.; Zhong, Z.W. Intelligent Diagnosis and Prognosis of Tool Wear Using Dominant Feature Identification. IEEE Trans. Ind. Inform. 2009, 5, 454–464. [Google Scholar] [CrossRef]
- Jardine, A.K.; Lin, D.; Banjevic, D. A Review on Machinery Diagnostics and Prognostics: Implementing Condition-based Maintenance. Mech. Syst. Signal Process. 2006, 20, 1483–1510. [Google Scholar] [CrossRef]
- Oyebande, B.O.; Renfrew, A.C. Condition Monitoring of Railway Electric Point Machine. IEE Proc. Electr. Power Appl. 2002, 196, 465–473. [Google Scholar] [CrossRef]
- Zarembski, A.M.; Palese, J.W. Managing Risk on the Railway Infrastructure. In Proceedings of the 7th World Congress on Railway Research, Montreal, QC, Canada, 4–8 June 2006.
- Quiroga, L.M.; Wegele, S.; Schnieder, E. Benefit of Railway Infrastructure Diagnosis Systems on its Availability. IFAC Proc. Vol. 2009, 42, 146–150. [Google Scholar] [CrossRef]
- Márquez, F.P.G.; Schmid, F.; Collado, J.C. A Reliability Centered Approach to Remote Condition Monitoring: A Railway Points Case Study. Reliab. Eng. Syst. Saf. 2003, 80, 33–40. [Google Scholar] [CrossRef]
- Silmon, J. Operational Industrial Fault Detection and Diagnosis: Railway Actuator Case Studies. Ph.D. Thesis, University of Birmingham, Birmingham, UK, 2009. [Google Scholar]
- Asada, T.; Roberts, C. Improving the Dependability of DC Point Machines with a Novel Condition Monitoring System. Proc. Inst. Mech. Eng. F J. Rail Rapid Transit 2013, 227, 322–332. [Google Scholar] [CrossRef]
- Eker, O.; Camci, F.; Kumar, U. SVM-Based Diagnostics on Railway Turnouts. Int. J. Perform. Eng. 2012, 8, 289–298. [Google Scholar]
- Bolbolamiri, N.; Sanai, M.; Mirabadi, A. Time-Domain Stator Current Condition Monitoring: Analyzing Point Failures Detection by Kolmogorov-Smirnov (K-S) Test. Int. J. Electr. Comput. Energ. Electron. Commun. Eng. 2012, 6, 587–592. [Google Scholar]
- Asada, T.; Roberts, C.; Koseki, T. An Algorithm for Improved Performance of Railway Condition Monitoring Equipment: Alternating-Current Point Machine Case Study. Transp. Res. Part C Emerg. Technol. 2013, 30, 81–92. [Google Scholar] [CrossRef]
- Vileiniskis, M.; Remenyte-Prescott, M.; Rama, D. A Fault Detection Method for Railway Point Systems. J. Rail Rapid Transit 2016, 230, 852–865. [Google Scholar] [CrossRef]
- Kim, H.; Sa, J.; Chung, Y.; Park, D.; Yoon, S. Fault Diagnosis of Railway Point Machines Using Dynamic Time Warping. Electron. Lett. 2016, 52, 818–819. [Google Scholar] [CrossRef]
- Lee, J.; Choi, H.; Park, D.; Chung, Y.; Kim, H.-Y.; Yoon, S. Fault Detection and Diagnosis of Railway Point Machines by Sound Analysis. Sensors 2016, 16, 549. [Google Scholar] [CrossRef] [PubMed]
- Oh, H.; Han, B.; Mc Cluskey, P.; Han, C.; Youn, B.D. Physics-of-Failure, Condition Monitoring, and Prognostics of Insulated Gate Bipolar Transistor Modules: A Review. IEEE Trans. Power Electron. 2015, 30, 2413–2426. [Google Scholar] [CrossRef]
- Shang, H. Maintenance Modelling, Simulation, and Performance Assessment for Railway Asset Management. Ph.D. Thesis, Université de Technologie, Troyes, France, 2015. [Google Scholar]
- Márquez, F.P.G.; Pedregal, D.J. An Algorithm for Detecting Faults in Railway Point Mechanisms. IFAC Proc. Vol. 2006, 39, 1360–1365. [Google Scholar] [CrossRef]
- Ye, L.; Keogh, E. Time Series Shapelets: A New Primitive for Data Mining. In Proceedings of the ACM SIGKDD, Paris, France, 28 June–1 July 2009; pp. 947–956.
- Rakthanmanon, T.; Keogh, E. Fast Shapelets: A Scalable Algorithm for Discovering Time Series Shapelets. In Proceedings of the SIAM International Conference on Data Mining, Austin, TX, USA, 2–4 May 2013; pp. 668–676.
- Ali, A.; Shamsuddin, S.M.; Ralescu, A.L. Classification with Class Imbalance Problem: A Review. Int. J. Adv. Soft Comput. Its Appl. 2015, 7, 176–204. [Google Scholar]
- Witten, I.; Frank, E. Data Mining: Practical Machine Learning Tools and Techniques, 3rd ed.; Morgan Kaufmann: San Francisco, CA, USA, 2005. [Google Scholar]
- Theodoridis, S.; Koutroumbas, K. Pattern Recognition, 4th ed.; Academic Press: Oxford, UK, 2009. [Google Scholar]
- Pan, D.; Liu, J.; Cao, J. Remaining Useful Life Estimation using an Inverse Gaussian Degradation Model. Neurocomputing 2016, 185, 64–72. [Google Scholar] [CrossRef]
- Gilchrist, A. Introducing Industry 4.0; Apress: New York, NY, USA, 2016; pp. 195–215. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Station Type | # of RPMs Replaced | # of RPMs Measured | Operation Period before Replacement (Years) | # of Accumulated Movements before Replacement | # of Movements Measured for Analysis |
|---|---|---|---|---|---|
| A | 15 | 14 | 12 | 1284–33,272 | 406 |
| B | 13 | 3 | 12–14 | 653–19,391 | 47 |
| C | 17 | 7 | 12–14 | 12,875–107,927 | 141 |
| D | 2 | 1 | 10–13 | 11,442–137,370 | 24 |
| E | 7 | 5 | 12–16 | 5778–391,141 | 113 |
| F | 5 | 4 | 13–14 | 5209–82,795 | 64 |
| G | 8 | 5 | 14–17 | 436–108,600 | 118 |
| Method | Normalization | Comparison | Distance |
|---|---|---|---|
| Shapelet-Subsequence | Length and Z | Subsequence | Euclidean |
| Shapelet-Fullsequence | Length and Z | Full-sequence | Euclidean |
| DTW [18] | Z | Full-sequence | DTW |
| Method | Imbalanced Scenario | Balanced Scenario |
|---|---|---|
| Shapelet-Subsequence | 0.95 | 0.97 |
| Shapelet-Fullsequence | 0.92 | 0.94 |
| DTW [18] | 0.53 | 0.60 |
| Method | Training (Unit: Second) | Testing (per RPM Movement) (Unit: Millisecond) |
|---|---|---|
| Shapelet-Subsequence | 35.54 | 0.921 |
| Shapelet-Fullsequence | 0.21 | 0.994 |
| DTW [18] | 0.12 | 8.308 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sa, J.; Choi, Y.; Chung, Y.; Kim, H.-Y.; Park, D.; Yoon, S. Replacement Condition Detection of Railway Point Machines Using an Electric Current Sensor. Sensors 2017, 17, 263. https://doi.org/10.3390/s17020263
Sa J, Choi Y, Chung Y, Kim H-Y, Park D, Yoon S. Replacement Condition Detection of Railway Point Machines Using an Electric Current Sensor. Sensors. 2017; 17(2):263. https://doi.org/10.3390/s17020263
Chicago/Turabian StyleSa, Jaewon, Younchang Choi, Yongwha Chung, Hee-Young Kim, Daihee Park, and Sukhan Yoon. 2017. "Replacement Condition Detection of Railway Point Machines Using an Electric Current Sensor" Sensors 17, no. 2: 263. https://doi.org/10.3390/s17020263
APA StyleSa, J., Choi, Y., Chung, Y., Kim, H. -Y., Park, D., & Yoon, S. (2017). Replacement Condition Detection of Railway Point Machines Using an Electric Current Sensor. Sensors, 17(2), 263. https://doi.org/10.3390/s17020263