
Camber Angle Inspection for Vehicle Wheel Alignments

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. The Coordinate Transformation between Vehicle and Camber Inspection System
3. Camber Angle Inspection and Error Analysis
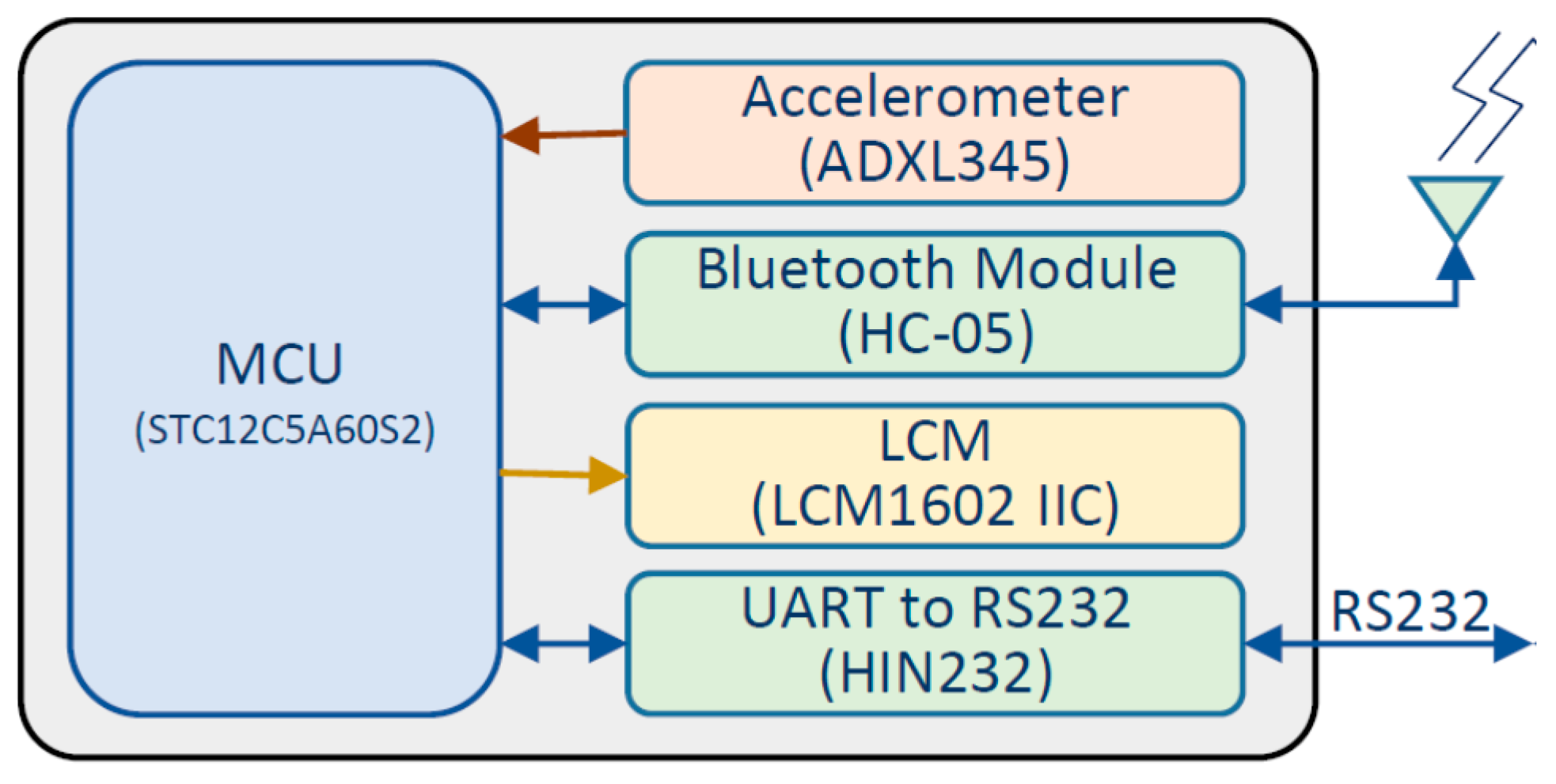
3.1. Camber Angle Inspection
3.2. Calibrations for the Misaligned Axes between the Camber Inspection System and the Accelerometer
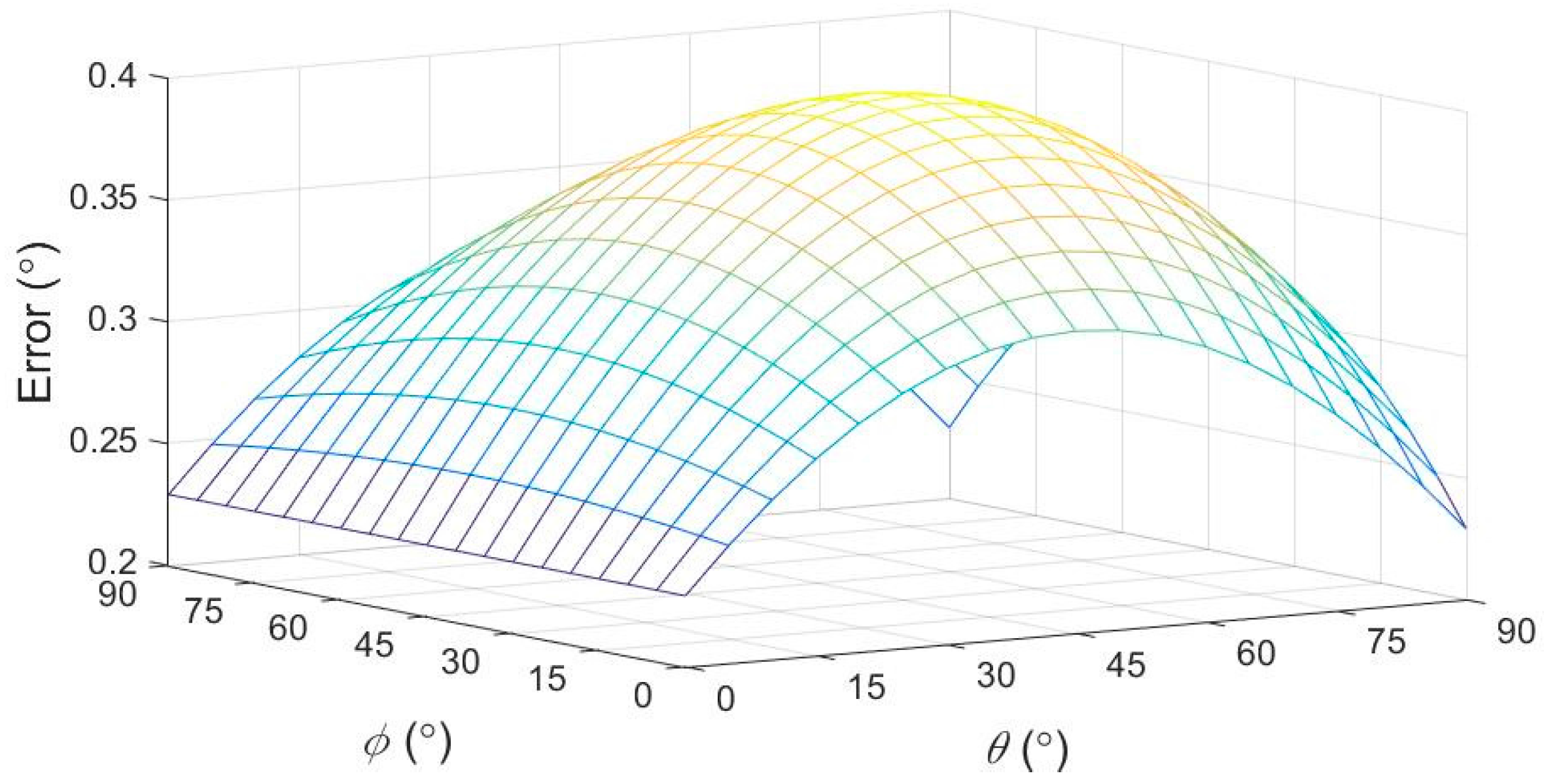
3.3. Measuring Error Analysis
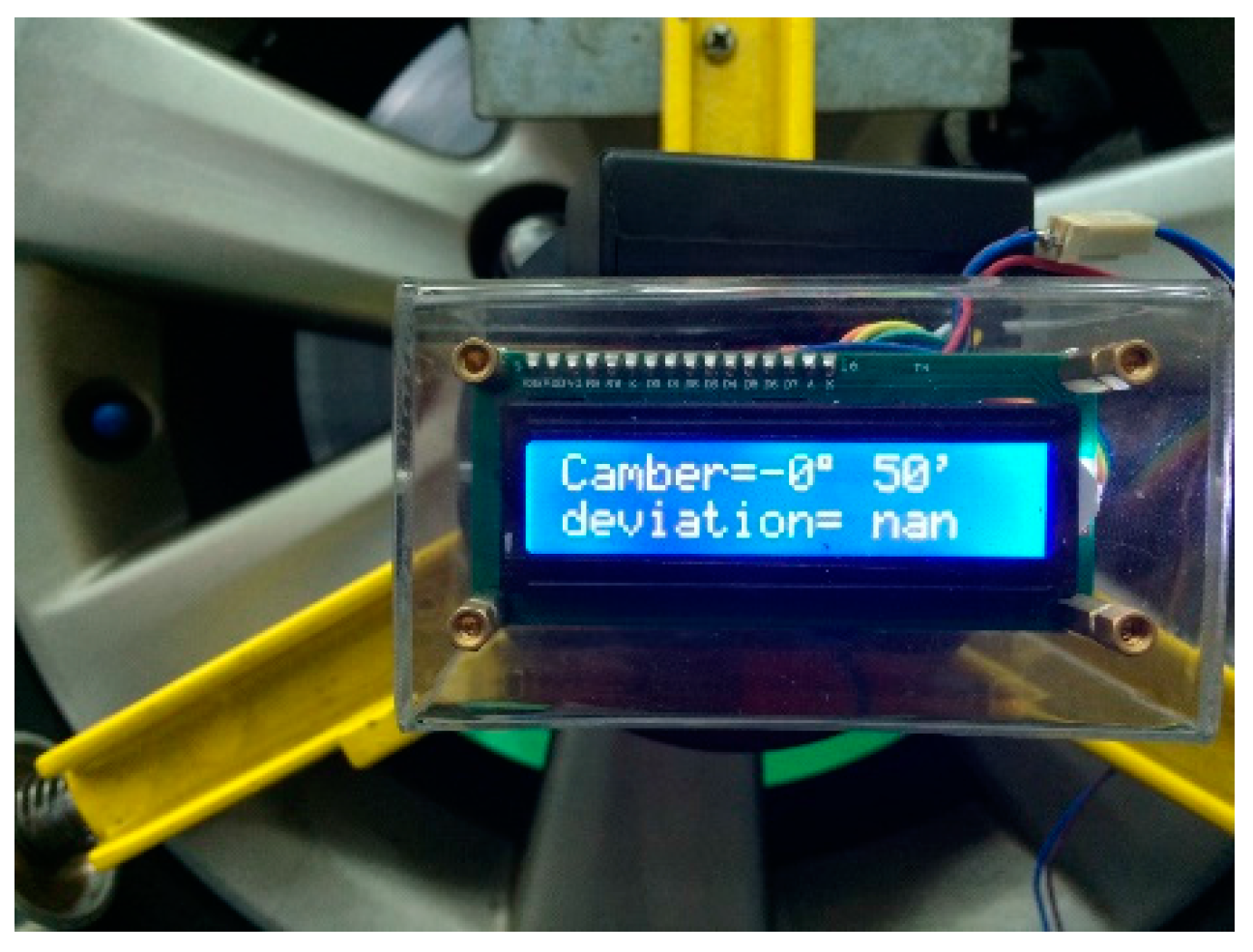
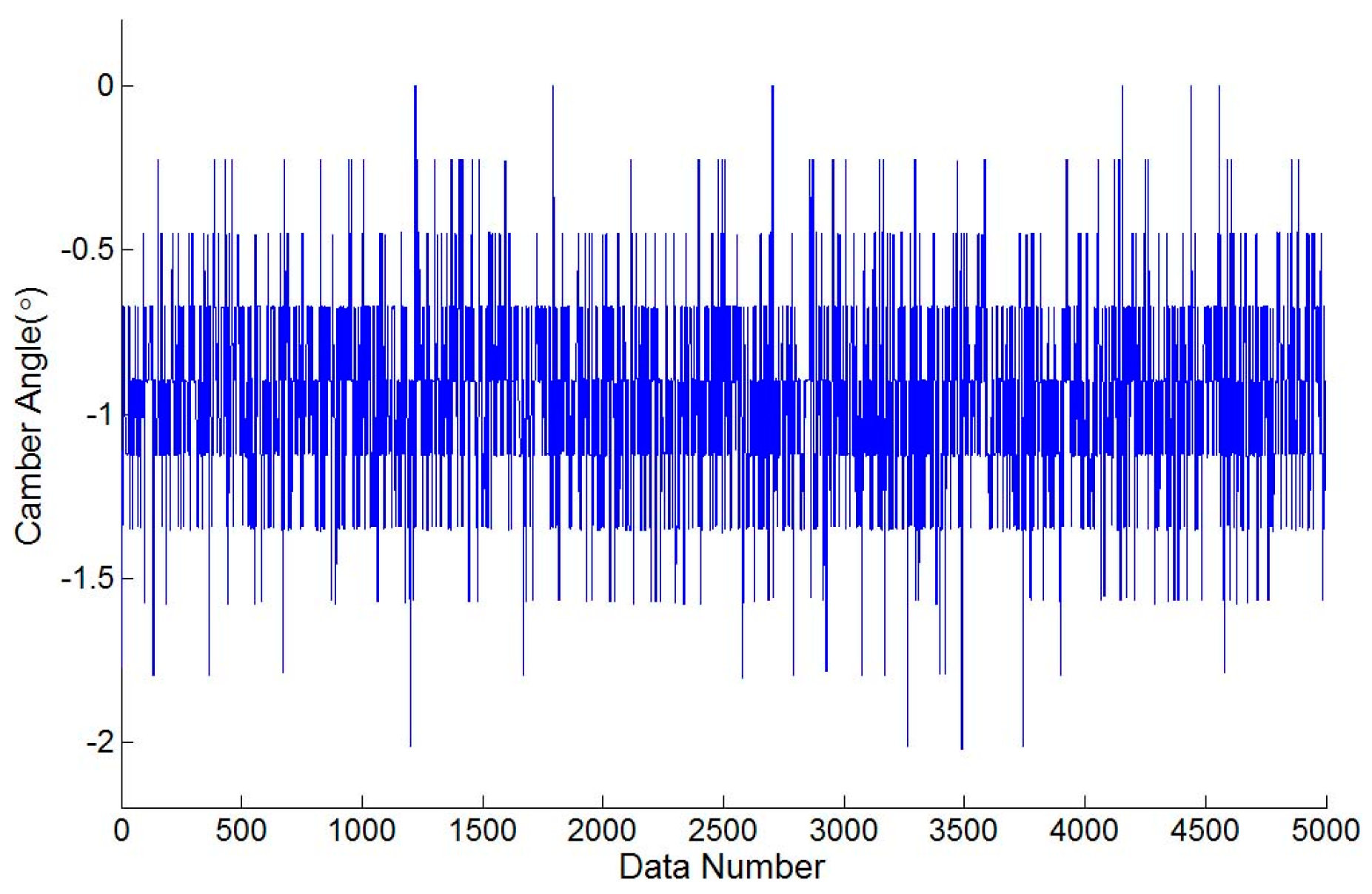
4. Authentic Camber Angle Inspections with Precision Improvement
5. Conclusions
Author Contributions
Conflicts of Interest
Abbreviations
| MCU | micro-control unit |
| RS232 | EIA-RS-232 (Electronic Industry Association Recommended Standard #232) |
| Wi-Fi | wireless fidelity |
References
- Díaz, V.; Ramírez, M.; Muñoz, B. The wheel model for the study of the wheel angle measurement in the periodic motor vehicle inspection. Int. J. Veh. Des. 2004, 34, 297–308. [Google Scholar] [CrossRef]
- Knowles, D. Today’s Technician—Shop Manual for Automotive Suspension & Steering Systems, 4th ed.; Thomson Delmar Learning: Clifton Park, NY, USA, 2007. [Google Scholar]
- Furukawa, Y.; Yuhara, N.; Sano, S.; Takeda, H.; Matsushita, Y. A review of four-wheel steering studies from the viewpoint of vehicle dynamics and control. Veh. Syst. Dyn. Int. J. Veh. Mech. Mobil. 1989, 18, 151–186. [Google Scholar] [CrossRef]
- Furferi, R.; Governi, L.; Volpe, Y.; Carfagni, M. Design and assessment of a machine vision system for automatic vehicle wheel alignment. Int. J. Adv. Rob. Syst. 2013, 10, 242. [Google Scholar] [CrossRef]
- Padegaonkar, A.; Brahme, M.; Bangale, M.; Raj, A.N.J. Implementation of machine vision system for finding defects in wheel alignment. Int. J. Comput. Technol. 2014, 1, 339–344. [Google Scholar]
- Baek, D.; Cho, S.; Bang, H. Wheel alignment inspection by 3d point cloud monitoring. J. Mech. Sci. Technol. 2014, 28, 1465–1471. [Google Scholar] [CrossRef]
- Li, W.; Gao, Y.; Zhang, R. Research on the machine vision system for vehicle four-wheel alignment parameters. In Proceedings of the 30th Chinese Control Conference, Yantai, China, 22–24 July 2011; pp. 3192–3195.
- Wang, D.; Tu, Y. An approach to measuring vehicle four-wheel alignment parameters based on computer vision. In Proceedings of the 8th International Conference on Electronic Measurement and Instruments, Xi’an, China, 16–18 August 2007; pp. 16–18.












© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Young, J.-S.; Hsu, H.-Y.; Chuang, C.-Y. Camber Angle Inspection for Vehicle Wheel Alignments. Sensors 2017, 17, 285. https://doi.org/10.3390/s17020285
Young J-S, Hsu H-Y, Chuang C-Y. Camber Angle Inspection for Vehicle Wheel Alignments. Sensors. 2017; 17(2):285. https://doi.org/10.3390/s17020285
Chicago/Turabian StyleYoung, Jieh-Shian, Hong-Yi Hsu, and Chih-Yuan Chuang. 2017. "Camber Angle Inspection for Vehicle Wheel Alignments" Sensors 17, no. 2: 285. https://doi.org/10.3390/s17020285
APA StyleYoung, J. -S., Hsu, H. -Y., & Chuang, C. -Y. (2017). Camber Angle Inspection for Vehicle Wheel Alignments. Sensors, 17(2), 285. https://doi.org/10.3390/s17020285