
A Probability-Based Algorithm Using Image Sensors to Track the LED in a Vehicle Visible Light Communication System



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Fundamental Background
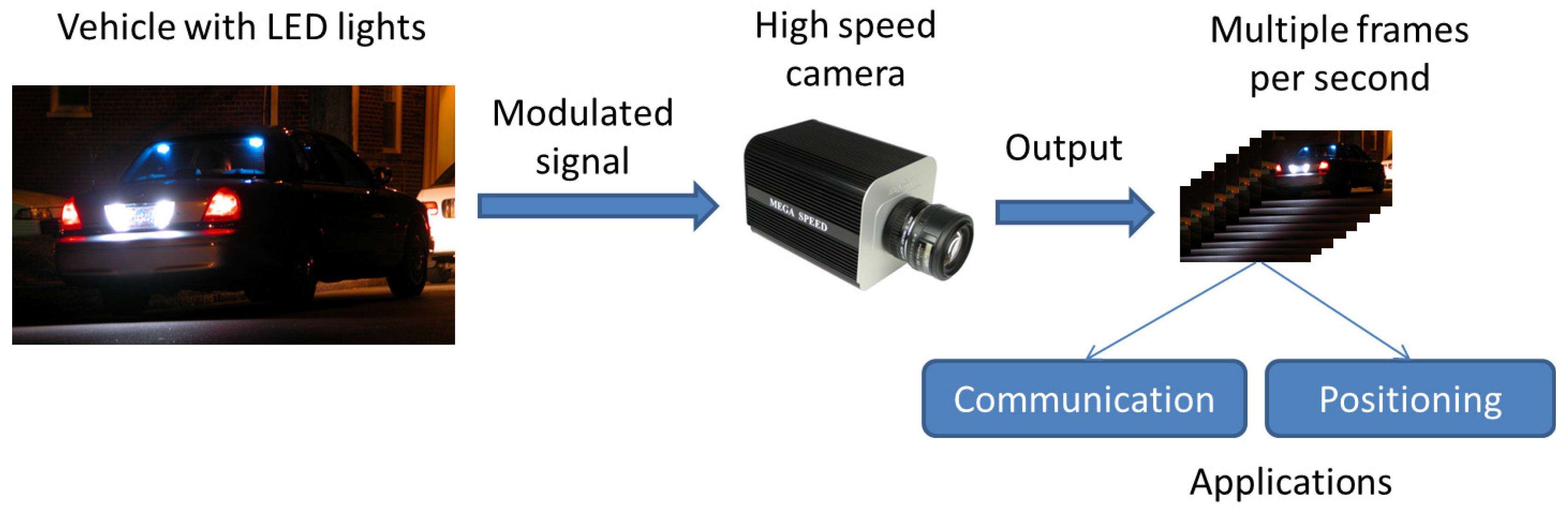
2.1. System Architecture
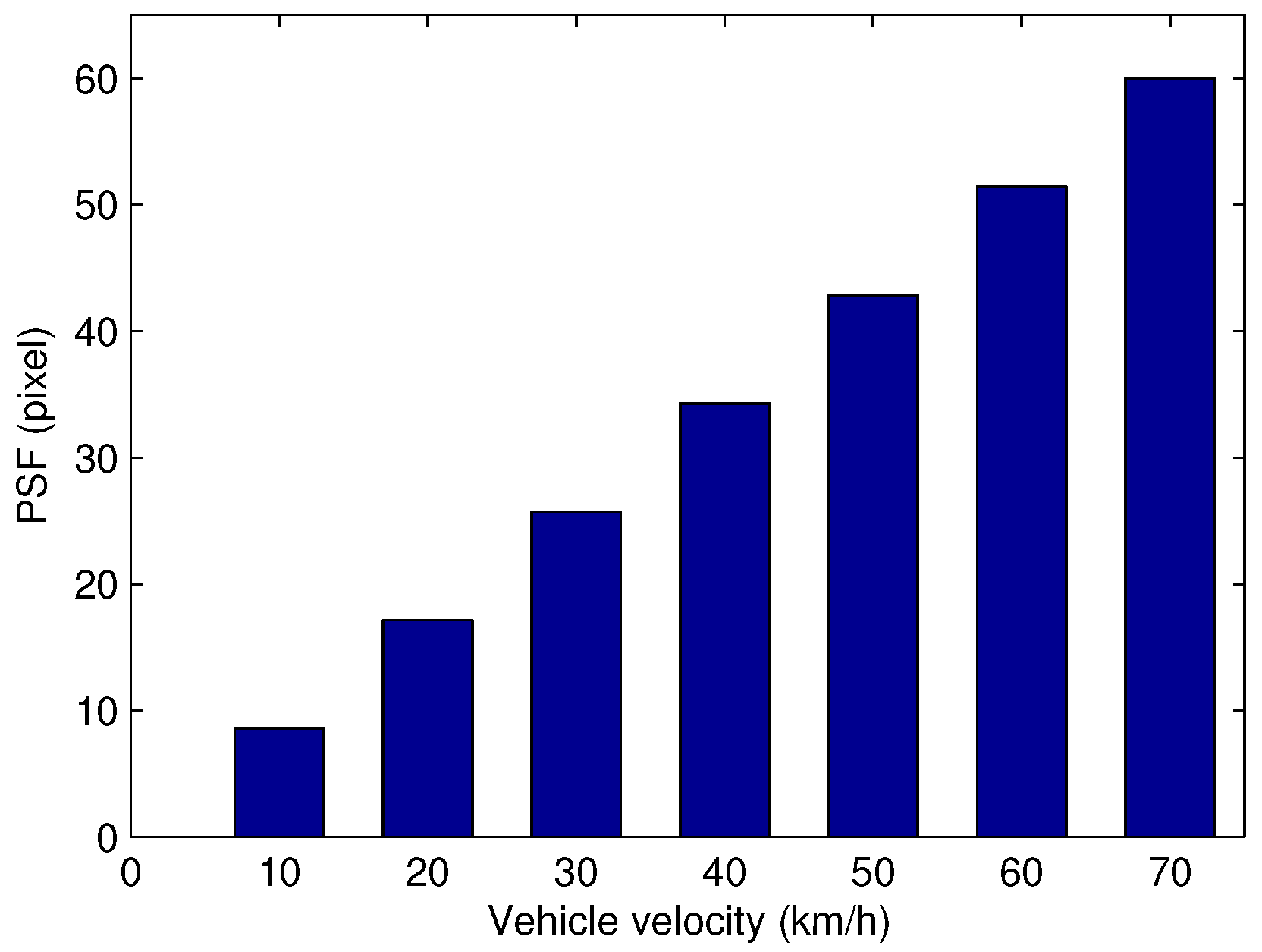
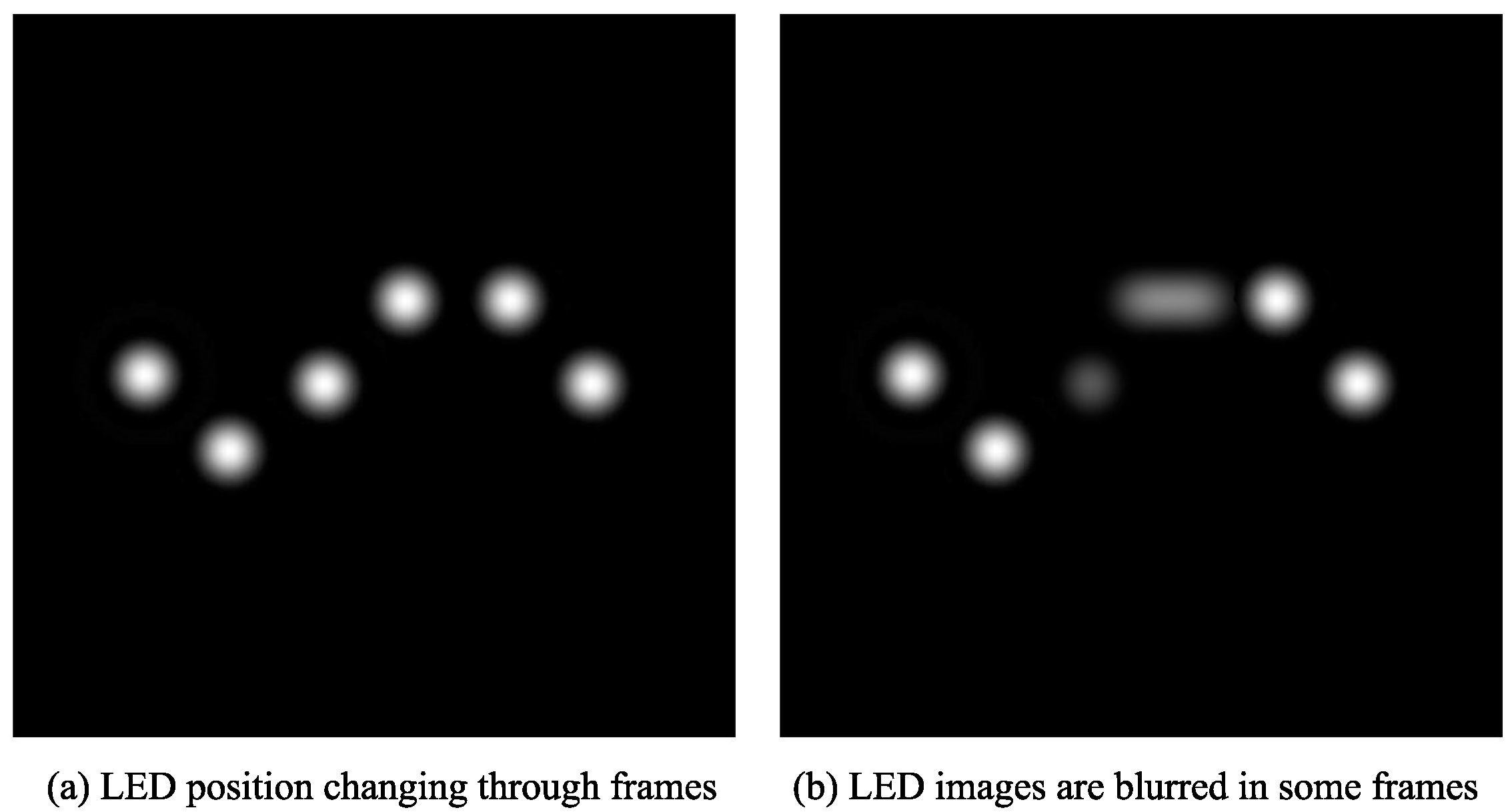
2.2. Difficulty in Tracking the LED Light of a Moving Vehicle
3. Proposed Tracking Algorithm
3.1. Information of a Pixel
3.1.1. Optical Flow
3.1.2. Pixel Intensity
3.2. Probability-Based Tracking Algorithm
4. Simulation
4.1. Simulation Procedure
4.1.1. Random Walk Model
4.1.2. Motion Blur Model
4.1.3. Final Simulated Image
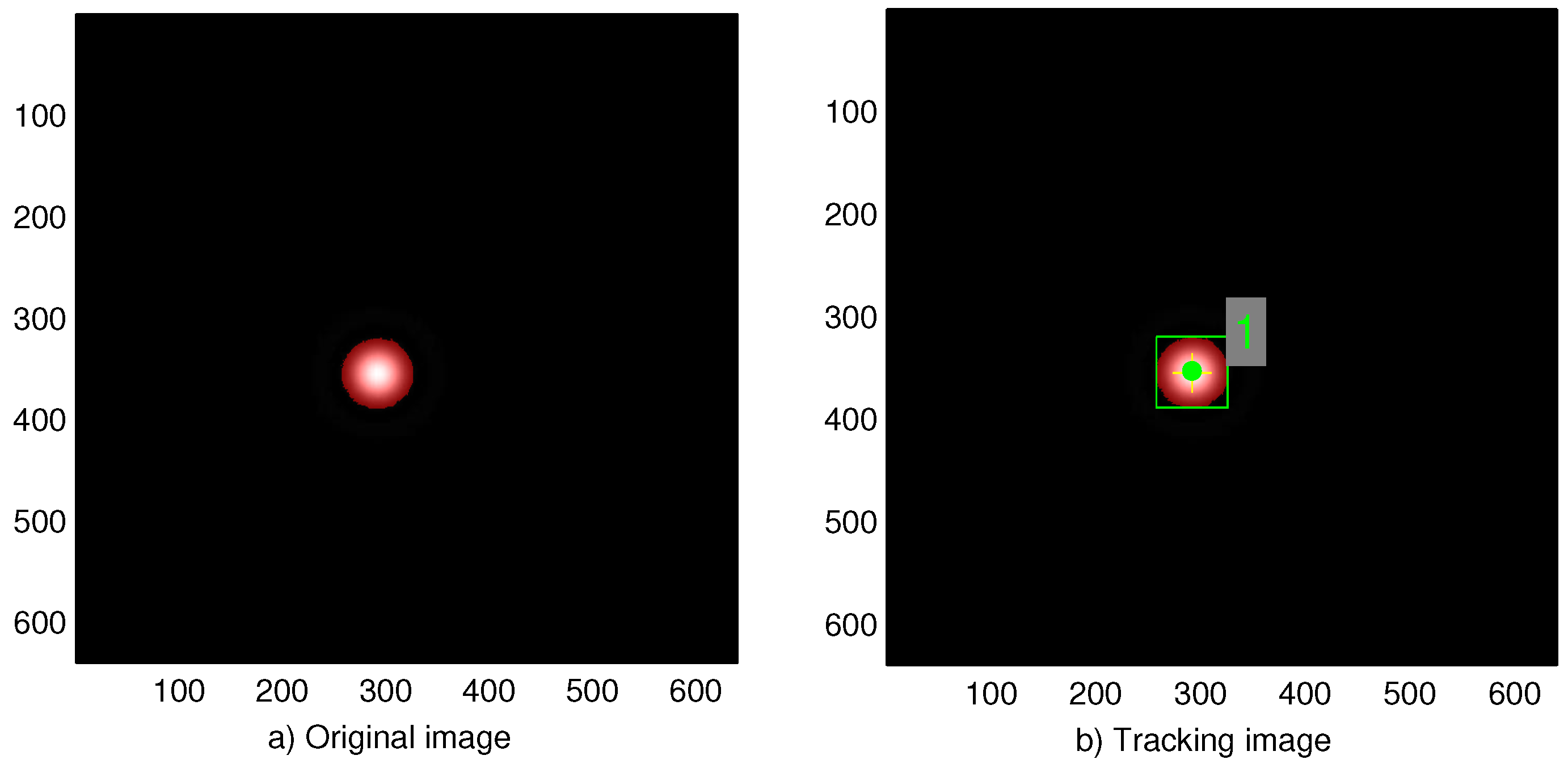
4.1.4. LED Detection and Result Evaluation
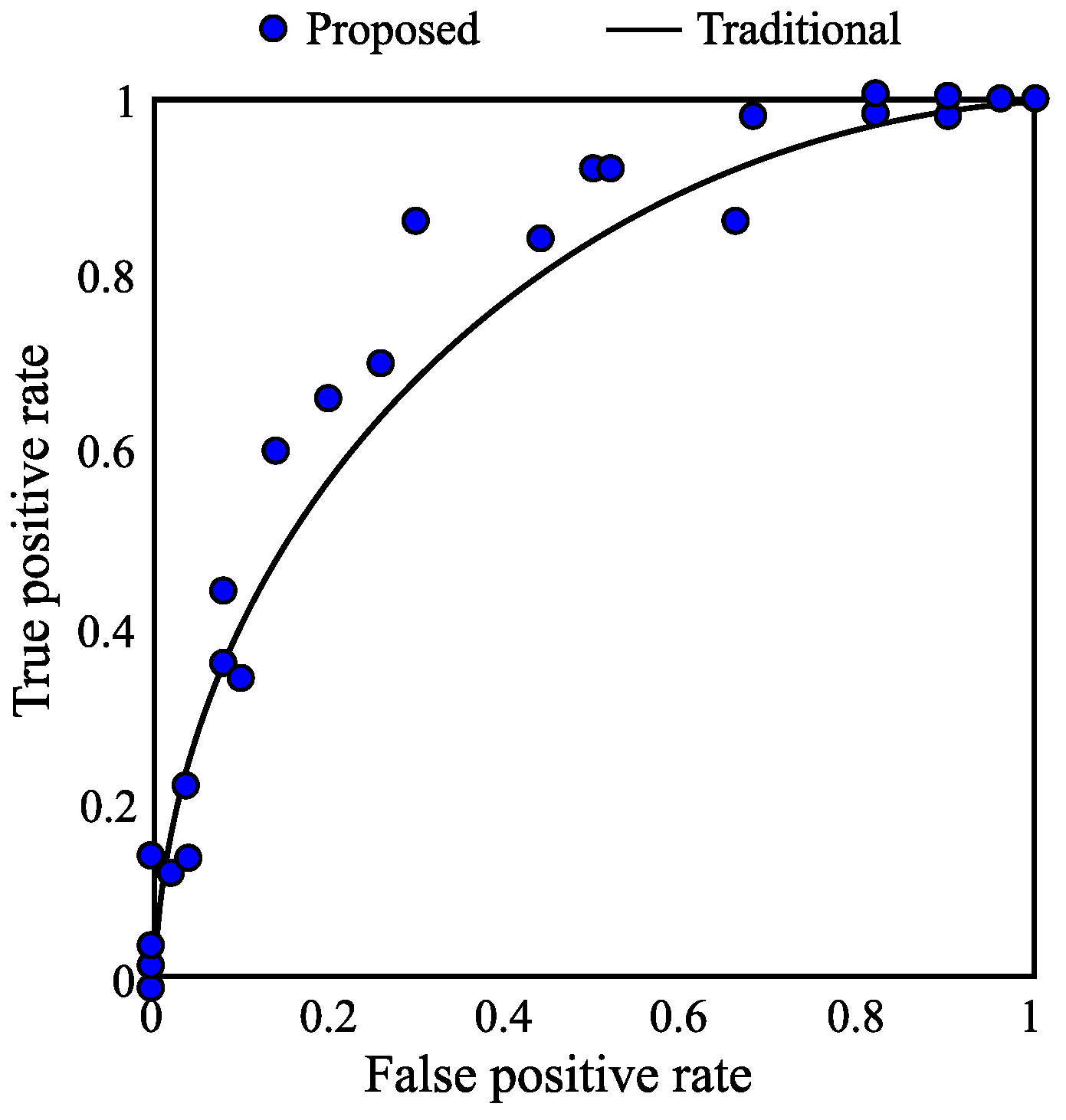
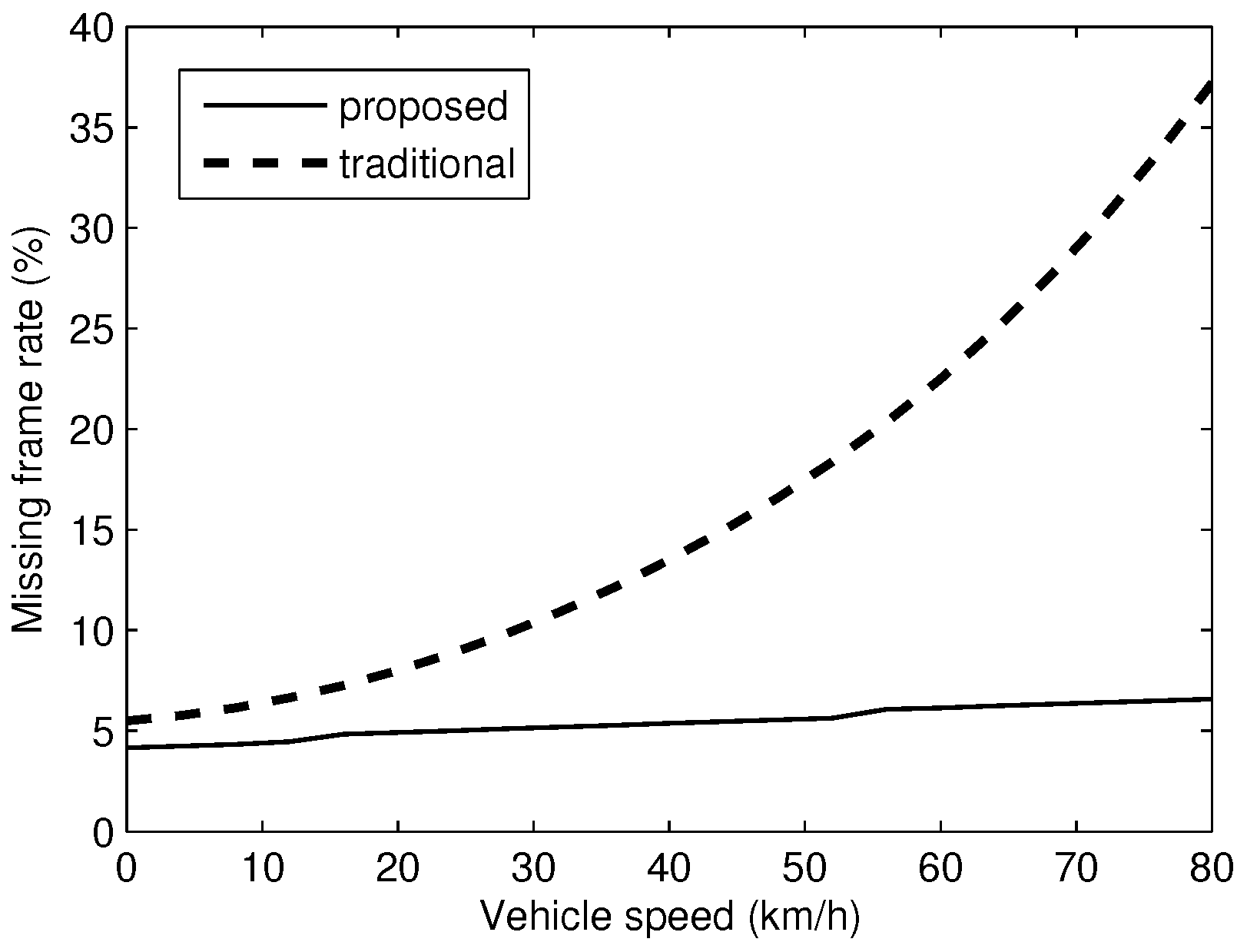
4.2. Simulation Results
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Hara, T.; Iwasaki, S.; Yendo, T.; Fujii, T.; Tanimoto, M. A new receiving system of visible light communication for ITS. In Proceedings of the 2007 IEEE on Intelligent Vehicles Symposium, Istanbul, Turkey, 13–15 June 2007; pp. 474–479.
- Liu, C.B.; Sadeghi, B.; Knightly, E.W. Enabling vehicular visible light communication (V2LC) networks. In Proceedings of the Eighth ACM International Workshop on Vehicular Inter-Networking, Las Vegas, NV, USA, 23 September 2011; ACM: New York, NY, USA; pp. 41–50.
- Kim, D.R.; Yang, S.H.; Kim, H.S.; Son, Y.H.; Han, S.K. Outdoor visible light communication for inter-vehicle communication using controller area network. In Proceedings of the 2012 Fourth International Conference on Communications and Electronics (ICCE), Hue, Vietnam, 1–3 August 2012; pp. 31–34.
- Do, T.H.; Yoo, M. An in-Depth Survey of Visible Light Communication Based Positioning Systems. Sensors 2016, 16, 678. [Google Scholar] [CrossRef] [PubMed]
- Sun, Z.; Bebis, G.; Miller, R. On-road vehicle detection: A review. In IEEE Transactions on Pattern Analysis and Machine Intelligence; IEEE: Piscataway, NJ, USA, 2006; Volume 28, pp. 694–711. [Google Scholar]
- Iwasaki, S.; Premachandra, C.; Endo, T.; Fujii, T.; Tanimoto, M.; Kimura, Y. Visible light road-to-vehicle communication using high-speed camera. In Proceedings of the 2008 IEEE on Intelligent Vehicles Symposium, Eindhoven, The Netherlands, 4–6 June 2008; pp. 13–18.
- Wook, H.B.C.; Haruyama, S.; Nakagawa, M. Visible light communication with LED traffic lights using 2-dimensional image sensor. In IEICE Transactions on Fundamentals of Electronics, Communications and Computer Sciences; Oxford University Press: Oxford, UK, 2006; Volume 89, pp. 654–659. [Google Scholar]
- Nagura, T.; Yamazato, T.; Katayama, M.; Yendo, T.; Fujii, T.; Okada, H. Tracking an LED array transmitter for visible light communications in the driving situation. In Proceedings of the 2010 7th International Symposium on Wireless Communication Systems (ISWCS), York, UK, 19–22 September 2010; pp. 765–769.
- Premachandra, H.C.N.; Yendo, T.; Tehrani, M.P.; Yamazato, T.; Okada, H.; Fujii, T.; Tanimoto, M. High-speed-camera image processing based LED traffic light detection for road-to-vehicle visible light communication. In Proceedings of the 2010 IEEE on Intelligent Vehicles Symposium (IV), Dearborn, MI, USA, 21–24 June 2010; pp. 793–798.
- Bell, G.P.; Engel, G.D.; Searle, M.J.; Evanicky, D. Method to Control Point Spread Function of an Image. U.S. Patent 7,742,239, 22 June 2010. [Google Scholar]












© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huynh, P.; Do, T.-H.; Yoo, M. A Probability-Based Algorithm Using Image Sensors to Track the LED in a Vehicle Visible Light Communication System. Sensors 2017, 17, 347. https://doi.org/10.3390/s17020347
Huynh P, Do T-H, Yoo M. A Probability-Based Algorithm Using Image Sensors to Track the LED in a Vehicle Visible Light Communication System. Sensors. 2017; 17(2):347. https://doi.org/10.3390/s17020347
Chicago/Turabian StyleHuynh, Phat, Trong-Hop Do, and Myungsik Yoo. 2017. "A Probability-Based Algorithm Using Image Sensors to Track the LED in a Vehicle Visible Light Communication System" Sensors 17, no. 2: 347. https://doi.org/10.3390/s17020347
APA StyleHuynh, P., Do, T. -H., & Yoo, M. (2017). A Probability-Based Algorithm Using Image Sensors to Track the LED in a Vehicle Visible Light Communication System. Sensors, 17(2), 347. https://doi.org/10.3390/s17020347