Posture Detection Based on Smart Cushion for Wheelchair Users



Abstract
:1. Introduction
- An optimization method of pressure sensor deployment is proposed to more accurately detect sitting postures.
- An in-depth comparison of several classification techniques has been carried out to identify the best posture classifier based on pressure sensors’ smart cushion.
- In contrast with previous studies, the Body Mass Index (BMI) is among the considered parameters to evaluate the generality and robustness of the proposed deployment method across different body shapes.
2. Related Work
2.1. Cushion with Pressure Sensor Array
2.2. Smart Cushions Based on Fewer Individual Pressure Sensors
3. System Design
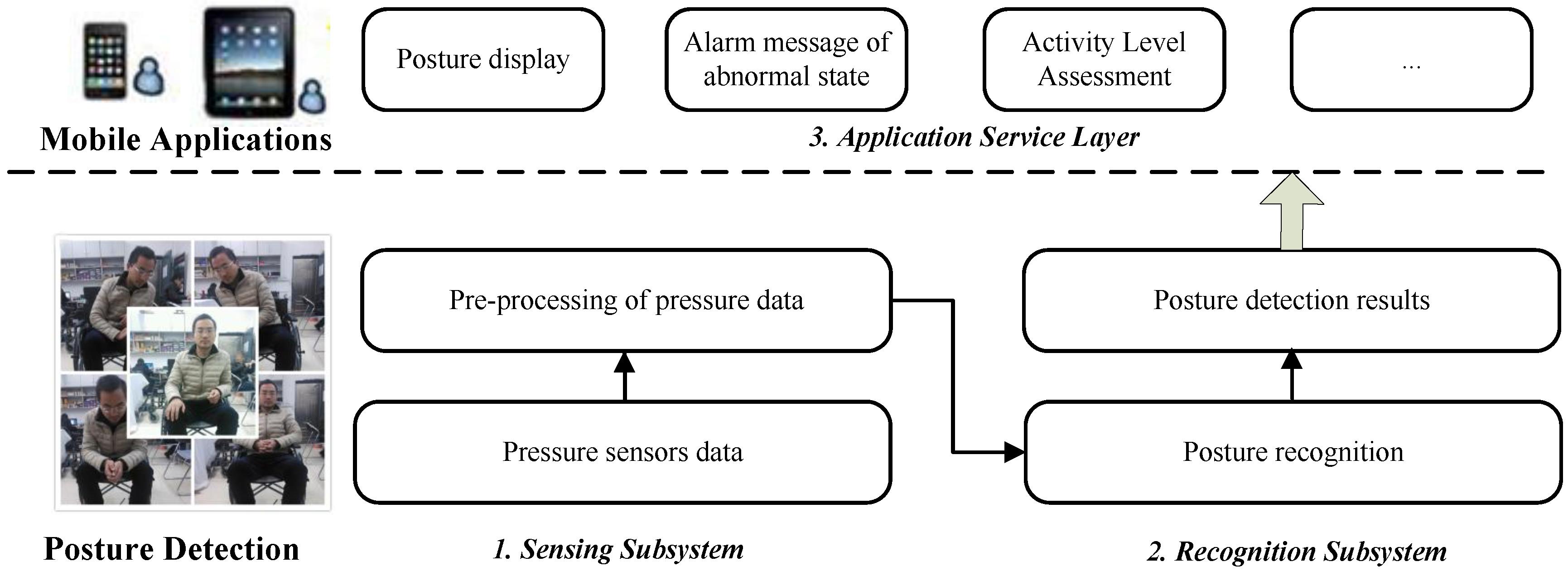
3.1. System Architecture
- Posture Detection Layer: it includes two subsystems, (i) the Sensing subsystem, which uses pressure sensors deployed on the wheelchair to collect data generated by the weight of the body and (ii) the Recognition subsystem that, based on the Arduino platform (see Section 3.2), runs the posture recognition algorithm on the collected pressure sensor data. Posture detection results can therefore be fed to the application service layer.
- Application Service Layer: several (mobile and cloud-based) applications can be developed on top of the posture recognition subsystem and exploit the geo-location from dedicated mobile device services (such as GPS, WiFi, or cellular tower signal strength) to locate the user. Applications can display the sensing results, perform activity level assessment, alert the user of dangerous postures and, if necessary, send his/her geo-location and make emergency automatic voice calls to caregivers.
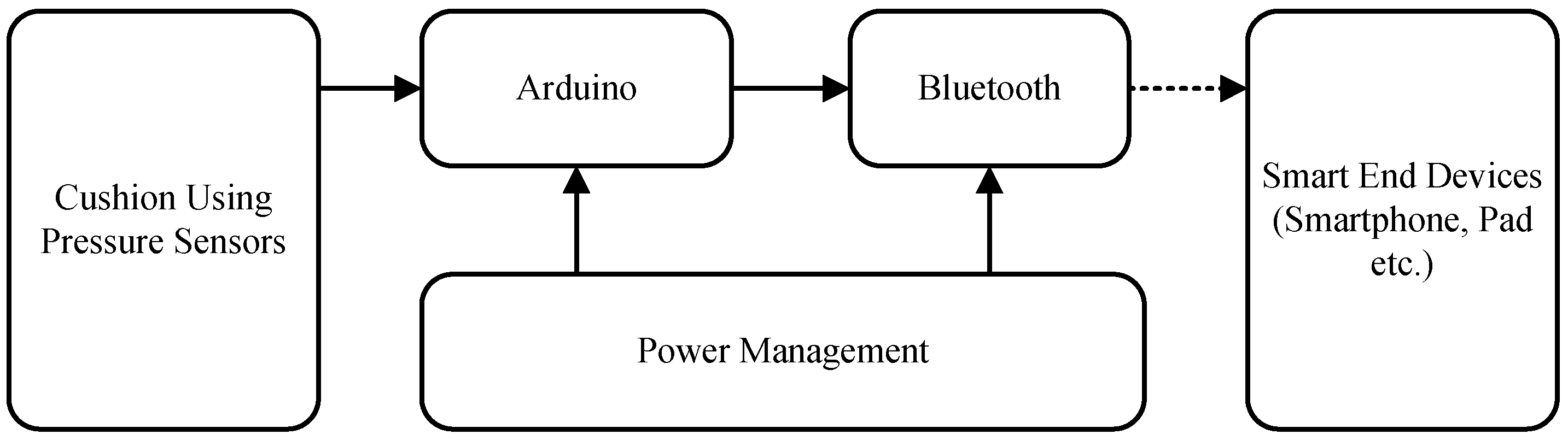
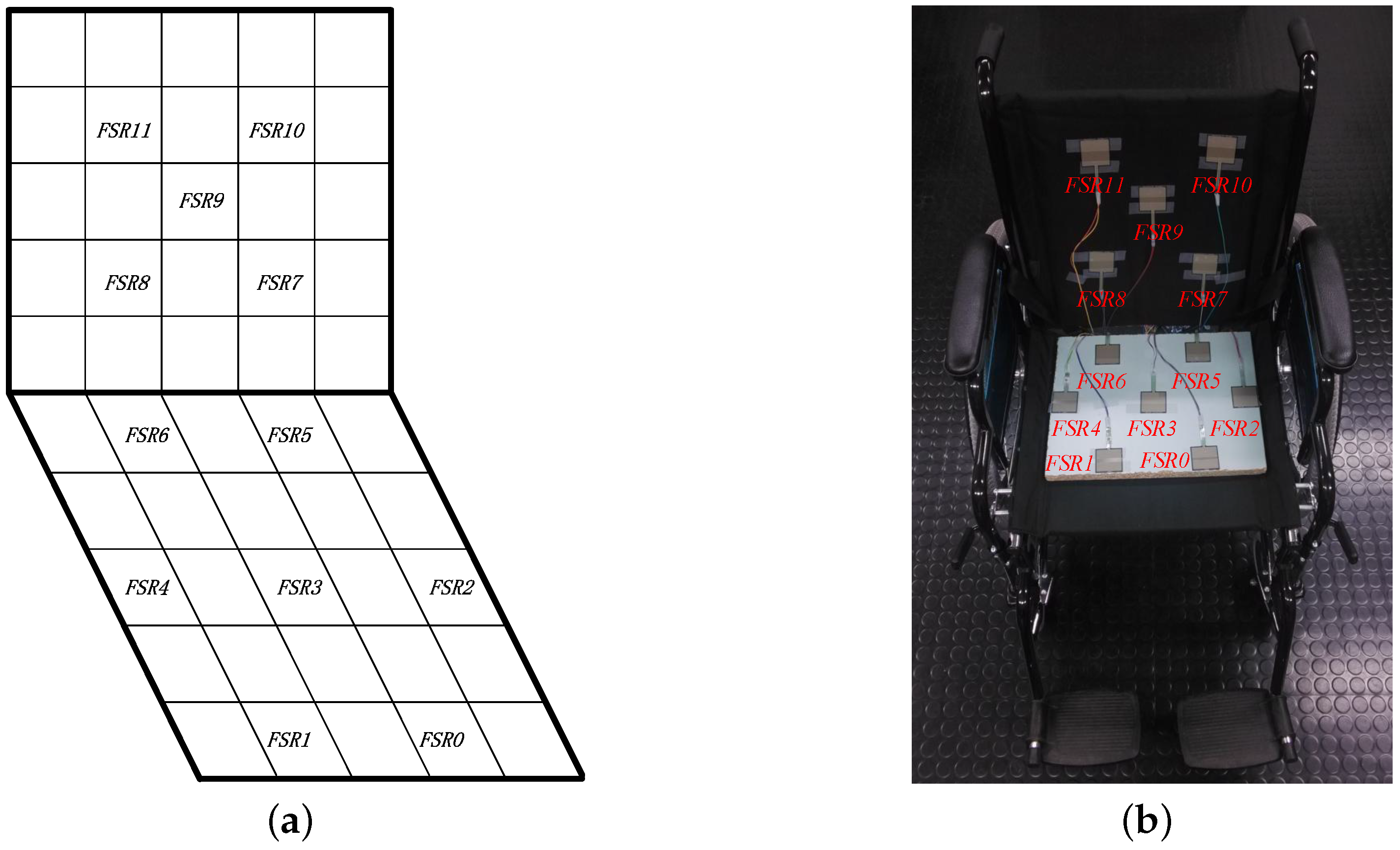
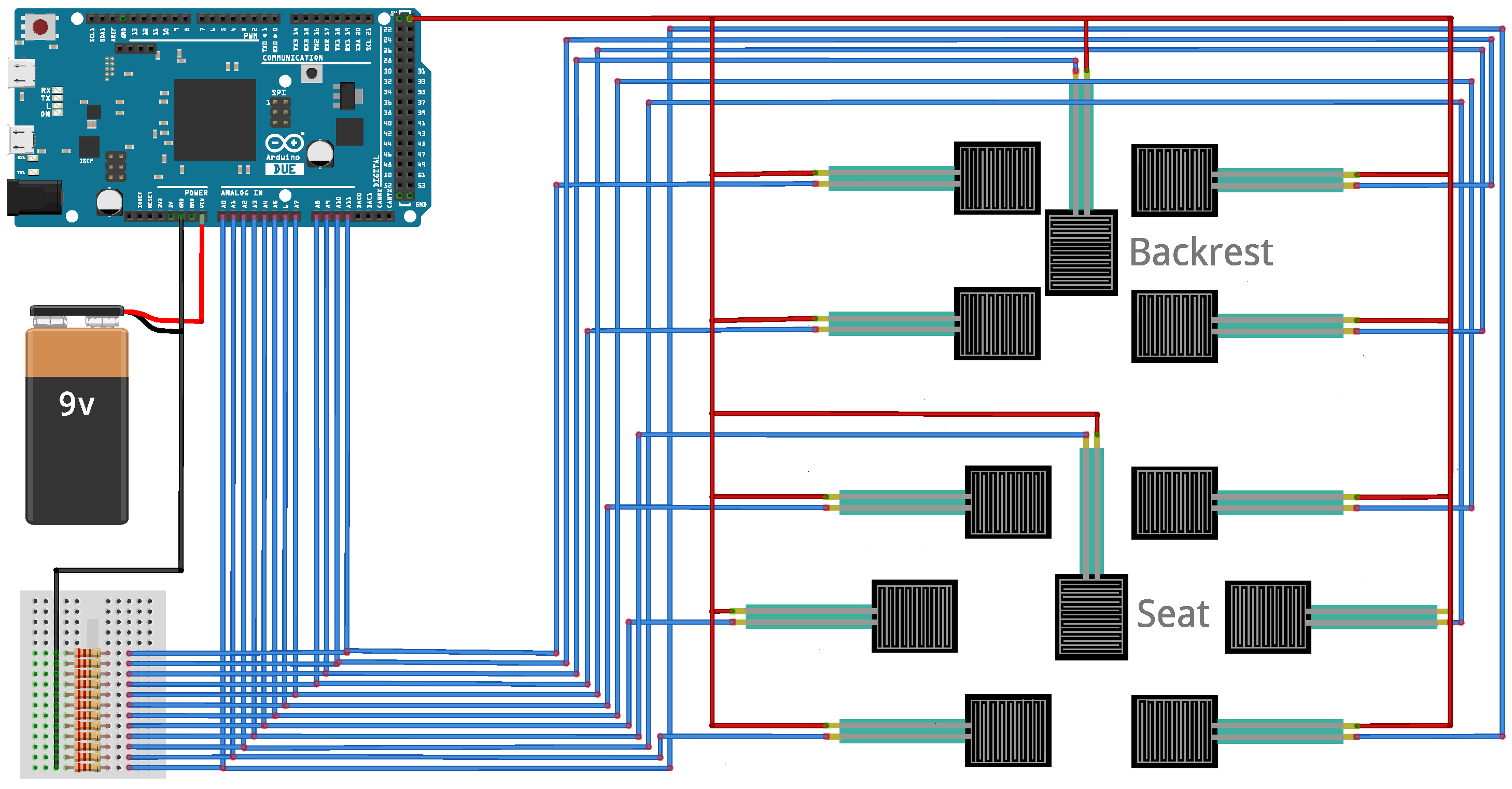
3.2. Hardware Design of the Smart Cushion
- data sensing (cushion equipped with pressure sensors);
- data processing (Arduino-based unit);
- data transmission (Bluetooth shield for Arduino).
4. System Evaluation
4.1. Posture Definition and Data Collection
4.2. Classification
4.3. Sensor Deployment Optimization Using the Backward Selection Method
5. Performance Evaluation
5.1. Performance Evaluation of Each Classifier
5.2. Sensor Selection Using the Backward Selection Method
5.3. Comparison of Recognition Results with Different BMI Values
5.4. Comparison of the Proposed Method with Previous Studies
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Perez, A.J.; Labrador, M.A.; Barbeau, S.J. G-sense: A scalable architecture for global sensing and monitoring. IEEE Netw. 2010, 24, 57–64. [Google Scholar] [CrossRef]
- Bellifemine, F.; Fortino, G.; Giannantonio, R.; Gravina, R.; Guerrieri, A.; Sgroi, M. SPINE: A domain-specific framework for rapid prototyping of WBSN applications. Softw. Pract. Exp. 2011, 41, 237–265. [Google Scholar] [CrossRef]
- Banos, O.; Villalonga, C.; Damas, M.; Gloesekoetter, P.; Pomares, H.; Rojas, I. PhysioDroid: Combining Wearable Health Sensors and Mobile Devices for a Ubiquitous, Continuous, and Personal Monitoring. Sci. World J. 2014, 2014, 490824. [Google Scholar] [CrossRef] [PubMed]
- Bourouis, A.; Feham, M.; Bouchachia, A. A new architecture of a ubiquitous health monitoring system: A prototype of cloud mobile health monitoring system. Int. J. Comput. Sci. 2012, 9, 434–438. [Google Scholar]
- Alshurafa, N.; Xu, W.; Liu, J.J. Designing a robust activity recognition framework for health and exergaming using wearable sensors. IEEE J. Biomed. Health Inform. 2014, 18, 1636–1646. [Google Scholar] [CrossRef] [PubMed]
- Ma, C.; Gravina, R.; Li, W.; Zhang, Y.; Li, Q.; Fortino, G. Activity Level Assessment of Wheelchair Users Using Smart Cushion. In Proceedings of the 11th International Conference on Body Area Networks (BodyNets 2016), Turin, Italy, 15–16 December 2016. [Google Scholar]
- Yang, L.; Li, W.; Ge, Y.; Fu, X.; Gravina, R.; Fortino, G. People-Centric Service for mHealth of Wheelchair Users in Smart Cities. In Internet of Things based on Smart Objects: Technology, Middleware and Applications; Springer International Publishing: Cham, Switzerland, 2014; pp. 163–179. [Google Scholar]
- Tong, Y.; Sun, J.; Chow, S.M.; Li, P. Cloud-Assisted Mobile-Access of Health Data with Privacy and Auditability. IEEE J. Biomed. Health Inform. 2014, 18, 419–429. [Google Scholar] [CrossRef] [PubMed]
- Fortino, G.; Giannantonio, R.; Gravina, R.; Kuryloski, P.; Jafari, R. Enabling Effective Programming and Flexible Management of Efficient Body Sensor Network Applications. IEEE Trans. Hum.-Mach. Syst. 2013, 43, 115–133. [Google Scholar] [CrossRef]
- Fortino, G.; Fatta, G.; Pathan, M.; Vasilakos, A. Cloud-assisted Body Area Networks: State-of-the-art and Future Challenges. Wirel. Netw. 2014, 20, 1925–1938. [Google Scholar] [CrossRef]
- Gravina, R.; Ma, C.; Pace, P.; Aloi, G.; Russo, W.; Li, W.; Fortino, G. Cloud-based Activity-aaService cyberphysical framework for human activity monitoring in mobility. Futur. Gener. Comput. Syst. 2016. [Google Scholar] [CrossRef]
- Fortino, G.; Guerrieri, A.; Bellifemine, F.; Giannantonio, R. Platform-independent development of collaborative wireless body sensor network applications: SPINE2. In Proceedings of the IEEE International Conference on Systems, Man and Cybernetics, 2009 (SMC 2009), San Antonio, TX, USA, 11–14 October 2009; pp. 3144–3150. [Google Scholar]
- Chou, H.; Wang, Y.; Chang, H. Design intelligent wheelchair with ECG measurement and wireless transmission function. Technol. Health Care 2015, 24, 345–355. [Google Scholar] [CrossRef] [PubMed]
- Srivastava, P.; Chatterjee, S.; Thakur, R. Design and Development of Dual Control System Applied to Smart Wheelchair using Voice and Gesture Control. Int. J. Res. Electr. Electron. Eng. 2014, 2, 1–9. [Google Scholar]
- Dryvendra, D.; Ramalingam, M.; Chinnavan, E.; Puviarasi, P. A Better Engineering Design: Low Cost Assistance Kit for Manual Wheelchair Users with Enhanced Obstacle Detection. J. Eng. Technol. Sci. 2015, 47, 389–405. [Google Scholar] [CrossRef]
- Sonenblum, S.E.; Sprigle, S.; Caspall, J.; Lopez, R. Validation of an accelerometer-based method to measure the use of manual wheelchairs. Med. Eng. Phys. 2012, 34, 781–786. [Google Scholar] [CrossRef] [PubMed]
- Postolache, O.; Viegas, V.; Pereira, J.M.D. Toward developing a smart wheelchair for user physiological stress and physical activity monitoring. In Proceedings of the International Conference on Medical Measurements and Applications (MeMeA), Lisbon, Portugal, 11–12 June 2014; pp. 1–6. [Google Scholar]
- Hiremath, S.V.; Intille, S.; Kelleher, A. Detection of physical activities using a physical activity monitor system for wheelchair users. Med. Eng. Phys. 2015, 37, 68–76. [Google Scholar] [CrossRef] [PubMed]
- Wu, Y.H.; Wang, C.C.; Chen, T.S. An Intelligent System for Wheelchair Users Using Data Mining and Sensor Networking Technologies. In Proceedings of the 2011 IEEE Asia-Pacific Services Computing Conference (APSCC), Jeju Island, Korea, 12–15 December 2011; pp. 337–344. [Google Scholar]
- Nakane, H.; Toyama, J.; Kudo, M. Fatigue detection using a pressure sensor chair. In Proceedings of the International Conference on Granular Computing (GrC2011), Kaohsiung, Taiwan, 8–10 November 2011; pp. 490–495. [Google Scholar]
- Ding, D.; Cooper, R.A.; Cooper, R.; Kelleher, A. Monitoring Seat Feature Usage among Wheelchair Users. In Proceedings of the 29th International Conference on Engineering in Medicine and Biology Society (EMBS 2007), Lyon, France, 22–26 August 2007; pp. 4364–4367. [Google Scholar]
- Fortino, G.; Gravina, R.; Li, W.; Ma, C. Using Cloud-assisted Body Area Networks to Track People Physical Activity in Mobility. In Proceedings of the 10th International Conference on Body Area Networks (BodyNets 2015), Sydney, Australia, 28–30 September 2015; pp. 85–91. [Google Scholar]
- Fortino, G.; Parisi, D.; Pirrone, V.; Fatta, G.D. BodyCloud: A SaaS approach for community Body Sensor Networks. Future Gener. Comput. Syst. 2014, 35, 62–79. [Google Scholar] [CrossRef]
- Ma, C.; Li, W.; Cao, J.; Gravina, R.; Fortino, G. Cloud-based Wheelchair Assist System for Mobility Impaired Individuals. In Proceedings of the 9th International Conference on Internet and Distributed Computing Systems (IDCS 2016), Wuhan, China, 28–30 September 2016; pp. 107–118. [Google Scholar]
- Ma, C.; Li, W.; Cao, J.; Wang, S.; Wu, L. A Fatigue Detect System Based on Activity Recognition. In Proceedings of the International Conference on Internet and Distributed Computing Systems, Calabria, Italy, 22–24 September 2014; pp. 303–311. [Google Scholar]
- Xu, W.; Huang, M.; Amini, N.; He, L.; Sarrafzadeh, M. eCushion: A Textile Pressure Sensor Array Design and Calibration for Sitting Posture Analysis. IEEE Sens. J. 2013, 13, 3926–3934. [Google Scholar] [CrossRef]
- Tekscan Website. Available online: http://www.tekscan.com/ (accessed on 20 March 2017).
- Tan, H.Z.; Slivovsky, L.A.; Pentland, A. A sensing chair using pressure distribution sensors. IEEE/ASME Trans. Mechatron. 2001, 6, 261–268. [Google Scholar] [CrossRef]
- Mota, S.; Picard, R.W. Automated Posture Analysis for Detecting Learner’s Interest Level. In Proceedings of the Conference on Computer Vision and Pattern Recognition Workshop, 2003 (CVPRW ’03), Madison, WI, USA, 16–22 June 2003; Volume 5, p. 49. [Google Scholar]
- Meyer, J.; Arnrich, B.; Schumm, J.; Troster, G. Design and modeling of a textile pressure sensor for sitting posture classification. IEEE Sens. J. 2010, 10, 1391–1398. [Google Scholar] [CrossRef]
- Mutlu, B.; Krause, A.; Forlizzi, J.; Guestrin, C.; Hodgins, J. Robust, low-cost, non-intrusive sensing and recognition of seated postures. In Proceedings of the 20th Annual ACM Symposium on User Interface Software and Technology, Newport, RI, USA, 7–10 October 2007; pp. 149–158. [Google Scholar]
- Kamiya, K.; Kudo, M.; Nonaka, H.; Toyama, J. Sitting posture analysis by pressure sensors. In Proceedings of the 19th International Conference on Pattern Recognition (ICPR2008), Tampa, FL, USA, 8–11 December 2008; pp. 1–4. [Google Scholar]
- Xu, L.; Chen, G.; Wang, J.; Shen, R.; Zhao, S. A sensing cushion using simple pressure distribution sensors. In Proceedings of the 2012 IEEE Conference on. Multisensor Fusion and Integration for Intelligent Systems (MFI), Hamburg, Germany, 13–15 September 2012; pp. 451–456. [Google Scholar]
- Fard, F.; Moghimi, S.; Lotfi, R. Evaluating Pressure Ulcer Development in Wheelchair-Bound Population Using Sitting Posture Identification. Engineering 2013, 5, 132–136. [Google Scholar] [CrossRef]
- Yu, H.; Stoelting, A.; Wang, Y.; Yi, Z.; Sarrafzadeh, M. Providing a cushion for wireless healthcare application development. IEEE Potentials 2010, 29, 19–23. [Google Scholar] [CrossRef]
- Benocci, M.; Farella, E.; Benini, L. A context-aware smart seat. In Proceedings of the 2011 4th IEEE International Workshop on Advances in Sensors and Interfaces (IWASI), Brindisi, Italy, 28–29 June 2011; pp. 104–109. [Google Scholar]
- Bao, J.; Li, W.; Li, J.; Ge, Y.; Bao, C. Sitting Posture Recognition based on data fusion on pressure cushion. TELKOMNIKA Indones. J. Electr. Eng. 2013, 11, 1769–1775. [Google Scholar] [CrossRef]
- Arias, D.E.; Pino, E.J.; Aqueveque, P.; Curtis, D.W. Unobtrusive support system for prevention of dangerous health conditions in wheelchair users. Mobile Inform. Syst. 2016, 2016, 1–14. [Google Scholar] [CrossRef]
- Min, S.D. System for Monitoring Sitting Posture in Real-Time Using Pressure Sensors. U.S. Patent 20,160,113,583, 28 April 2016. [Google Scholar]
- Zemp, R.; Tanadini, M.; Plüss, S.; Schnüriger, K.; Singh, N.B.; Taylor, W.R.; Lorenzetti, S. Application of Machine Learning Approaches for Classifying Sitting Posture Based on Force and Acceleration Sensors. Biomed Res. Int. 2016, 2016, 1–9. [Google Scholar] [CrossRef] [PubMed]
- Barba, R.; Madrid, Á.P.; Boticario, J.G. Development of an inexpensive sensor network for recognition of sitting posture. Int. J. Distrib. Sens. Netw. 2015, 2015, 969237. [Google Scholar] [CrossRef]
- Fu, T.; Macleod, A. IntelliChair: An Approach for Activity Detection and Prediction via Posture Analysis. In Proceedings of the International Conference on Intelligent Environments, Washington, DC, USA, 30 June–4 July 2014; pp. 211–213. [Google Scholar]
- Kumar, R.; Bayliff, A.; De, D.; Evans, A.; Das, S.K.; Makos, M. Care-Chair: Sedentary Activities and Behavior Assessment with Smart Sensing on Chair Backrest. In Proceedings of the 2016 IEEE International Conference on Smart Computing, St Louis, MO, USA, 18–20 May 2016; pp. 1–8. [Google Scholar]
- Ma, C.; Li, W.; Gravina, R.; Fortino, G. Activity Recognition and Monitoring for Smart Wheelchair Users. In Proceedings of the 2016 IEEE Computer Supported Cooperative Work in Design (CSCWD), Nanchang, China, 4–6 May 2016; pp. 664–669. [Google Scholar]
- Darma Website. Available online: http://darma.co/ (accessed on 20 March 2017).
- Sensimat Website. Available online: http://www.sensimatsystems.com/ (accessed on 20 March 2017).
- Fsr406 Website. Available online: http://www.interlinkelectronics.com (accessed on 20 March 2017).
- Arduino DUE Website. Available online: https://www.arduino.cc (accessed on 20 March 2017).
- HC06 Bluetooth Website. Available online: https://www.olimex.com (accessed on 20 March 2017).
- Patil, T.; Sherekar, S. Performance analysis of Naive Bayes and J48 classification algorithm for data classification. Int. J. Comput. Sci. Appl. 2013, 6, 256–261. [Google Scholar]
- Chang, C.; Lin, C. LIBSVM: A library for support vector machines. ACM Trans. Intell. Syst. Technol. 2011, 2, 1–27. [Google Scholar] [CrossRef]
- Pirttikangas, S.; Fujinami, K.; Nakajima, T. Feature Selection and Activity Recognition from Wearable Sensors. Ubiquitous Comput. Syst. 2006, 4239, 516–527. [Google Scholar]
- Hall, M.A.; Frank, E. Combining Naive Bayes and Decision Tables. FLAIRS Conf. 2008, 2118, 318–319. [Google Scholar]
- Zhang, M.; Zhou, Z. ML-KNN: A lazy learning approach to multi-label learning. Pattern Recognit. 2007, 40, 2038–2048. [Google Scholar] [CrossRef]
- Sazonov, E.S.; Fulk, G.; Hill, J.; Schütz, Y.; Browning, R. Monitoring of posture allocations and activities by a shoe-based wearable sensor. IEEE Trans. Bio-Med. Eng. 2011, 58, 983–990. [Google Scholar] [CrossRef] [PubMed]
- Mark, H.; Eibe, F.; Geoffrey, H.; Bernhard, P.; Peter, R.; H, W.I. The WEKA data mining software: An update. ACM SIGKDD Explor. Newsl. 2009, 11, 10–18. [Google Scholar]
- Gravina, R.; Alinia, P.; Ghasemzadeh, H.; Fortino, G. Multi-Sensor Fusion in Body Sensor Networks: State-of-the-art and research challenges. Inf. Fusion 2017, 35, 68–80. [Google Scholar] [CrossRef]
- Fortino, G.; Gravina, R.; Guerrieri, A.; Fatta, G.D. Engineering Large-Scale Body Area Networks Applications. In Proceedings of the 8th International Conference on Body Area Networks (BodyNets 2013), Boston, MA, USA, 30 September–2 October 2013; pp. 363–369. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Author | Sensor Array Type | Placement of the Sensors | Detected Postures | Classification Technique/Method | Accuracy |
|---|---|---|---|---|---|
| Xu et al. [26] | E-textile | cushion on the seat | Sit up, forward, backward, lean left/right, right foot over left, left over right | Gray scale image | 85.9% |
| Tekscan [27] | E-textile | cushion on the seat and backrest | N/A | Pressure mapping | N/A |
| Tan et al. [28] | E-textile | cushion on the seat and backrest | N/A | PCA, Grayscale image | 96% |
| Mota et al. [29] | E-textile | cushion on the seat and backrest | Lean forward/back, lean forward right/left, sit upright/on the edge, etc. | Neural Network | 87.6% |
| Meyer et al. [30] | textile pressure sensor | cushion on the seat | Seat upright, lean right, left, forward, back, left leg crossed over right etc. | Naive Bayes | 82% |
| Multu et al. [31] | pressure sensor on the seat and backrest | 19 pressure sensors | Left leg crossed, right leg crossed lean left, lean back, lean forward etc. | Logistic Regression | 87% |
| Kamiya et al. [32] | sensor array | cushion on the seat | Normal, lean forward, lean backward, lean right, right leg crossed, lean right with right leg crossed etc. | SVM | 98.9% |
| Xu et al. [33] | Seat , backrest | Cushion on the seat and backrest | Lean left front, lean front, lean right front, lean left, seat upright, lean right etc. | Binary pressure distribution, Naive Bayes | 82.3% |
| Fard et al. [34] | sensor array | cushion on the seat | Sitting straight with bent keens, crossed legs left to right and right to left, stretched legs | pressure mapping technology | N/A |
| Author | Number of Sensors | Placement of the Sensors | Postures Recognized | Classification Techniques | Accuracy |
|---|---|---|---|---|---|
| Hu et al. [35] | 6 | 2 on the seat and 4 on the backrest | Sit straight, lean left, lean right, lean back | SVM | N/A |
| Benocci et al. [36] | 5 | 4 on the seat and 1 on the backrest | Normal posture, right side, left side, right/left/both legs extend forward | kNN | 92.7% |
| Bao et al. [37] | 5 | 5 on the seat | Normal sitting, forward, backward, lean left, lean right, swing, shake | Density-based cluster | 94.2% |
| Diego et al. [38] | 4 | 4 on the seat | N/A | Threshold-based | N/A |
| Min et al. [39] | 6 | 4 on the seat and 2 on the backrest | Crossing left leg, crossing right leg, forward buttocks, bending down the upper body, correct posture | Decision Tree | N/A |
| Zemp et al. [40] | 16 | 10 on the seat, 2 on the armrests and 4 on the backrest | Upright, reclined, forward inclined, laterally right/left, crossed legs, left over right/ right over left | SVM, Multinomial Regression, Boosting, Neural Networks and Random Forest | 90.9% |
| Barba et al. [41] | 16 | 8 on the seat and 8 on the backrest | Standard, lying, forward, normal position, sitting on the edge, legs crossed, sitting on one/two foot etc. | N/A | N/A |
| Fu et al. [42] | 8 | 4 on the seat and 4 on the backrest | N/A | Decision Tree | N/A |
| Kumar et al. [43] | 4 | 4 on the backrest | N/A | Extremely Randomized Trees | 86% |
| Ma et al. [44] | 3 | 2 on the seat and 1 on the backrest | Upright sitting, lean left, right, forward, backward | Decision Tree | 99.5% |
| Darma [45] | 6 | 6 on the seat | N/A | N/A | N/A |
| Sensimat [46] | 6 | 6 on the seat | N/A | N/A | N/A |
| Part Name | Description | Price (USD) |
|---|---|---|
| Arduino DUE board | Data Processing Unit | 30 |
| FSR 406 pressure sensor | 12 pressure sensors applied to the seat and backrest | 180 |
| Bluetooth shield (HC-06) | Bluetooth module to connect the cushion to mobile devices | 8 |
| Seat Cover | A seat cushion | 10 |
| Total | 228 |
| Description | Underweight | Normal | Overweight and Obese |
|---|---|---|---|
| BMI | <18.5 | [18.5, 25) | ⩾25 |
| Number of subjects | 4 | 4 | 4 |
| Posture | Description | Samples of Posture |
|---|---|---|
| Proper Sitting (PS) | User seated correctly on the wheelchair | 7200 |
| Lean Left (LL) | User seated leaning to the left | 7200 |
| Lean Right (LR) | User seated leaning to the right | 7200 |
| Lean Forward (LF) | User seated leaning forward | 7200 |
| Lean Backward (LB) | User seated leaning backward | 7200 |
| No. | Classifier | Parameters |
|---|---|---|
| 1 | J48 | C = 0.25, M = 2 |
| 2 | SVM | SVM Type: C-SVC, Kernel Type: RBF, C = 1, Degree = 3 |
| 3 | MLP | 9 hidden layer neurons |
| 4 | Naive Bayes | default |
| 5 | Naive Bayes | BayesNet |
| 6 | kNN | k = 1 |
| 7 | kNN | k = 5 |
| No. | Classifier | Accuracy | Precision | Recall | F-Measure | Model Build Time (s) |
|---|---|---|---|---|---|---|
| 1 | J48 | 99.48% | 0.995 | 0.995 | 0.995 | 1.98 |
| 2 | SVM | 79.08% | 0.880 | 0.736 | 0.760 | 320.34 |
| 3 | MLP | 95.5% | 0.926 | 0.926 | 0.926 | 265.46 |
| 4 | Naive Bayes | 49.09% | 0.585 | 0.491 | 0.427 | 0.24 |
| 5 | BayesNet | 94.06% | 0.945 | 0.941 | 0.941 | 0.93 |
| 6 | kNN (k = 1) | 98.53% | 0.995 | 0.995 | 0.995 | 0.04 |
| 7 | kNN (k = 5) | 98.52% | 0.995 | 0.995 | 0.995 | 0.08 |
| Number of Active Sensors | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | ||
| Sensor ID | 0 | 99.48% | 99.49% | 99.50% | 99.49% | 99.50% | 99.49% | 99.47% | ||||
| 1 | 97.06% | 97.05% | 97.11% | 97.11% | 97.11% | 97.13% | 96.51% | 92.32% | 90.54% | 81.23% | 63.98% | |
| 2 | 99.49% | 99.49% | 99.49% | 99.50% | 99.51% | |||||||
| 3 | 99.46% | 99.50% | 99.50% | 99.50% | 99.50% | 99.42% | 99.41% | 98.99% | ||||
| 4 | 99.46% | 99.49% | 99.50% | 99.50% | 99.50% | 99.46% | 99.44% | 98.84% | 94.36% | 87.93% | 48.72% | |
| 5 | 99.48% | 99.49% | 99.49% | 99.49% | 99.49% | 99.50% | ||||||
| 6 | 99.49% | 99.51% | ||||||||||
| 7 | 99.48% | 99.49% | 99.49% | 99.49% | 99.49% | 99.44% | 99.42% | 95.80% | 92.28% | 89.51% | ||
| 8 | 99.48% | 99.50% | 99.51% | |||||||||
| 9 | 99.49% | 99.50% | 99.51% | 99.51% | ||||||||
| 10 | 99.50% | |||||||||||
| 11 | 99.48% | 99.30% | 99.32% | 99.33% | 99.27% | 98.98% | 98.98% | 98.90% | 98.01% | |||
| LSS | ||||||||||||
| Accuracy | Precision | Recall | F-Measure | |
|---|---|---|---|---|
| Underweight | 99.92% | 0.999 | 0.999 | 0.999 |
| Normal | 98.67% | 0.987 | 0.987 | 0.987 |
| Overweight and Obese | 99.82% | 0.998 | 0.998 | 0.998 |
| All | 99.47% | 0.995 | 0.995 | 0.995 |
| Accuracy | Precision | Recall | F-Measure | |
|---|---|---|---|---|
| Underweight | 99.93% | 0.999 | 0.999 | 0.999 |
| Normal | 98.67% | 0.987 | 0.987 | 0.987 |
| Overweight and Obese | 99.83% | 0.998 | 0.998 | 0.998 |
| All | 99.50% | 0.995 | 0.995 | 0.995 |
| Author | Sensor Deployment | Accuracy |
|---|---|---|
| Hu et al. [35] | 6 (0,1,7,8,10,11) | 98.70% |
| Benocci et al. [36] | 5 (0,1,5,6,9) | 97.58% |
| Bao et al. [37] | 5 (0,1,2,3,4) | 99.16% |
| Diego et al. [38] | 4 (0,1,5,6) | 97.11% |
| Min et al. [39] | 4 (0,1,5,6,10,11) | 98.5% |
| Ma et al. [44] | 3 (2,4,9) | 87.25% |
| Darma [45], Sensimat [46] | 6 (0,1,2,4,5,6) | 99.14% |
| Novel proposed method | 5 (1,3,4,7,11) | 99.47% |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, C.; Li, W.; Gravina, R.; Fortino, G. Posture Detection Based on Smart Cushion for Wheelchair Users. Sensors 2017, 17, 719. https://doi.org/10.3390/s17040719
Ma C, Li W, Gravina R, Fortino G. Posture Detection Based on Smart Cushion for Wheelchair Users. Sensors. 2017; 17(4):719. https://doi.org/10.3390/s17040719
Chicago/Turabian StyleMa, Congcong, Wenfeng Li, Raffaele Gravina, and Giancarlo Fortino. 2017. "Posture Detection Based on Smart Cushion for Wheelchair Users" Sensors 17, no. 4: 719. https://doi.org/10.3390/s17040719
APA StyleMa, C., Li, W., Gravina, R., & Fortino, G. (2017). Posture Detection Based on Smart Cushion for Wheelchair Users. Sensors, 17(4), 719. https://doi.org/10.3390/s17040719