
Comparison of Adaptive Spectral Estimation for Vehicle Speed Measurement with Radar Sensors

Abstract
:1. Introduction
2. SoG Fundamentals
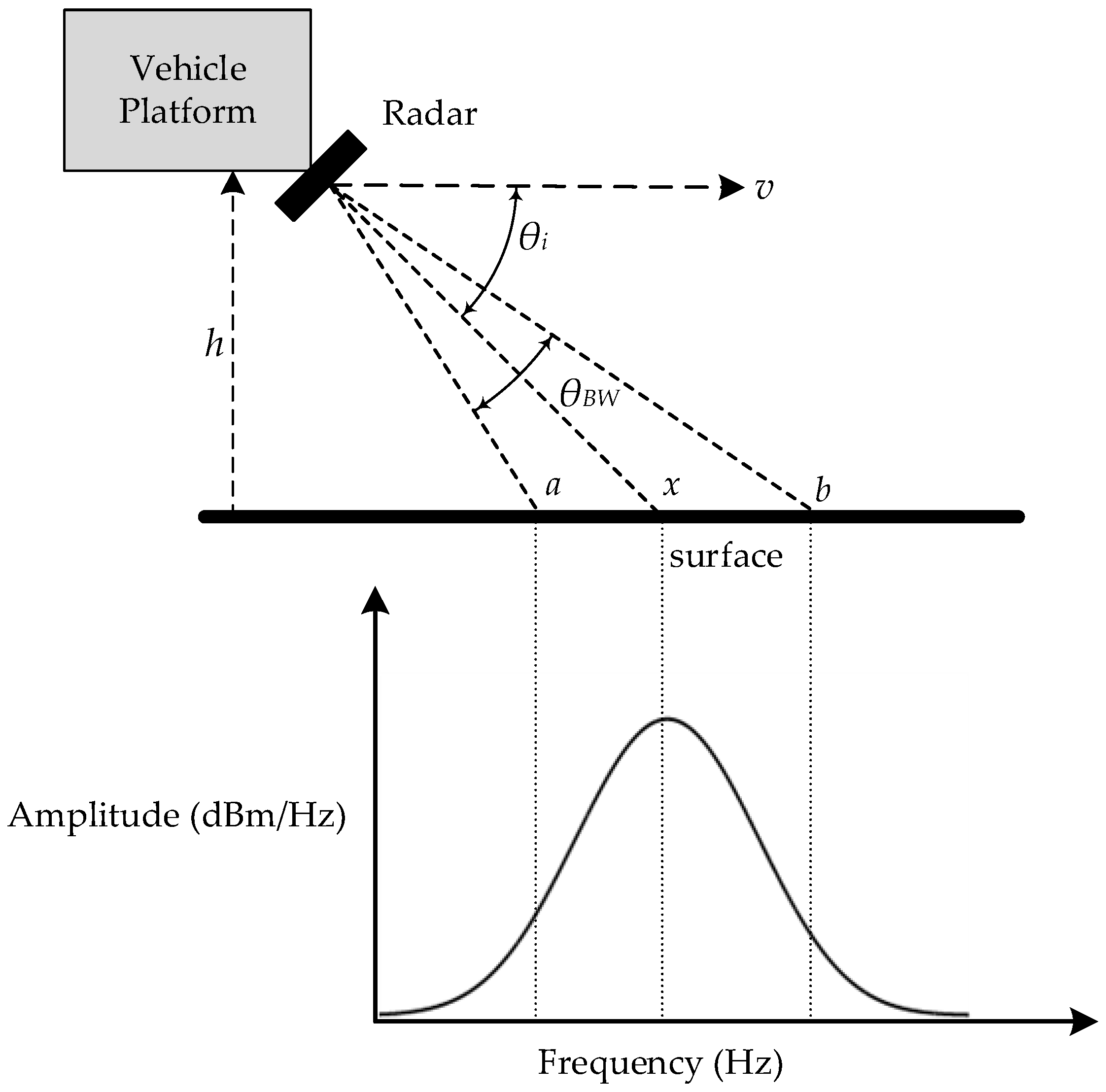
2.1. Speed Measurement Principle
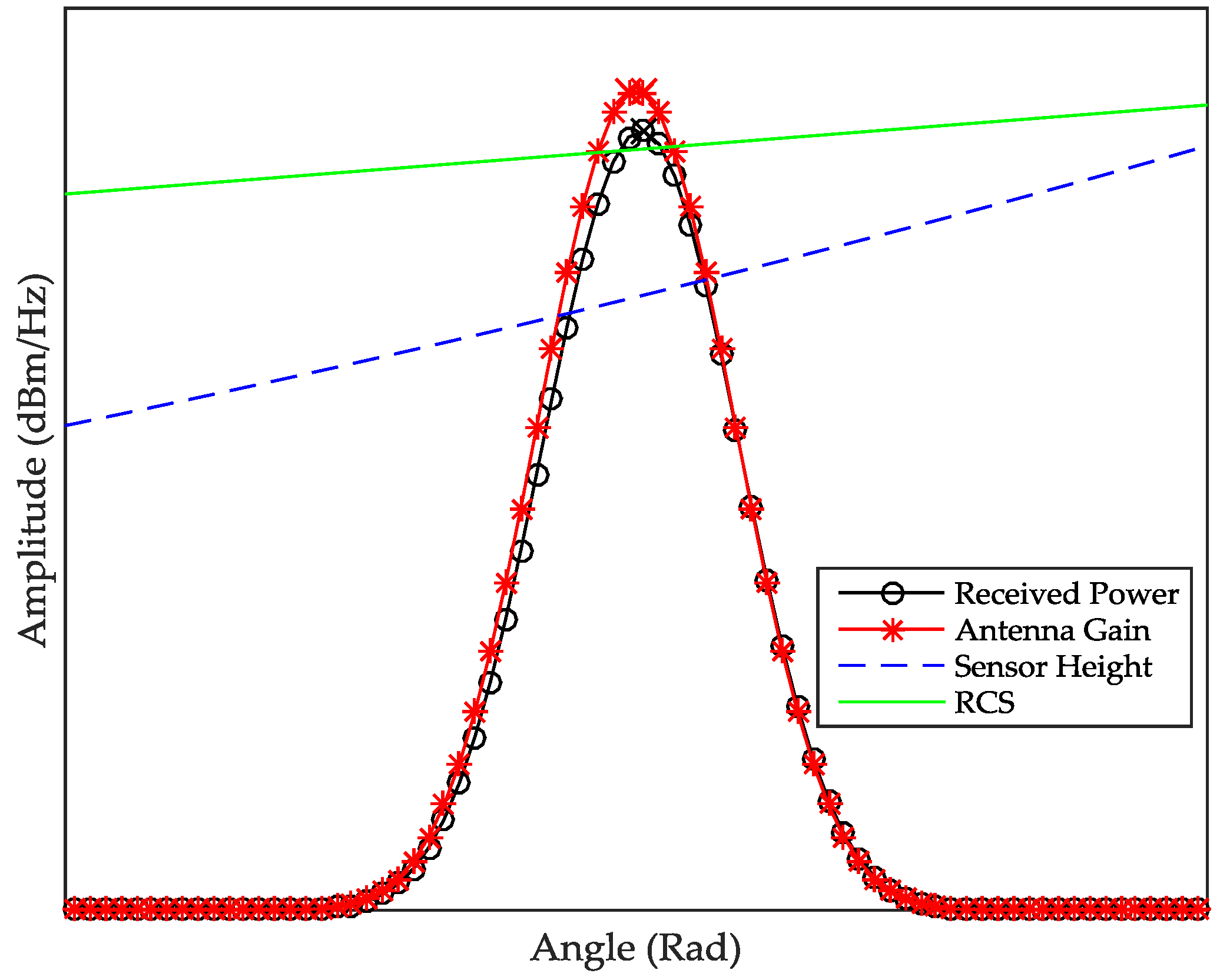
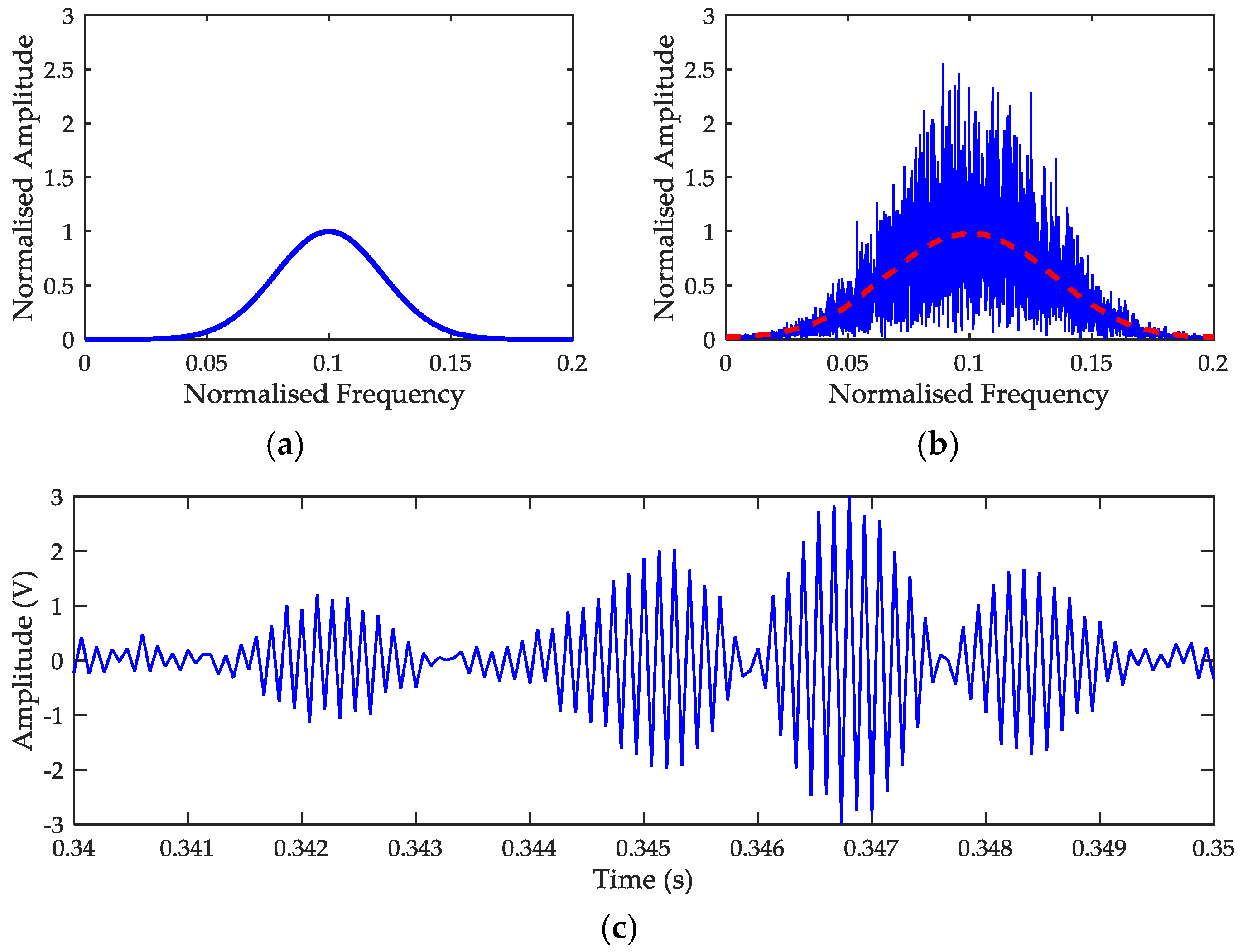
2.2. The Doppler Spectrum
3. Proposed Adaptive Mean Frequency Estimation Methods
3.1. Pre-Processing
3.2. Center-of-Mass Algorithm (CMA)
- Step 1.
- Firstly, measure the RMS spectrum via the FFT algorithm.
- Step 2.
- The algorithm searches for the returned Doppler signal in the frequency domain. To do this, the algorithm uses an amplitude threshold that turns all signals above it to one and all signals below it to zero.where TH1 is the system threshold. Naturally, the Doppler signal is corrupted by noise, so a suitable TH1 must be chosen relative to the noise floor. This of course implies that the SNR is sufficiently high, but given the relatively short distance between the ground and the sensor this assumption can be made. In our work, TH1 is given bywhere μnf and σnf are the mean and standard deviation of the spectrum noise floor. We assumed our noise floor is normally distributed.
- Step 3.
- Finding fmin’: The algorithm searches fmin’ from f = 1 toward the end of the spectrum by finding trailing of ones larger than a pre-determined width, w. Here, it is important to set a proper value of w so that the algorithm can distinguish between a true a tail of Doppler signal or a tail of random spurious peak. A noise burst can be ignored by the algorithm if value of w is larger than the width of a typical random spurious peak. However, a large value of w may not work well with narrow Doppler signals near the DC signal. Therefore, in this work we have set two different values of w for two different ranges of Doppler shift frequency.where fd is the Doppler shift frequency and it is obtained by measuring the strongest frequency component from the smoothed version of the Doppler spectrum, f(n). A rough estimate of fd is used to select a value of w and it does not introduce deficiency in the final estimate of Doppler shift frequency.
- Step 4.
- Finding fmax’: The process of determining fmax’ is similar in steps 3 except, the search starts from the end to the first sequence of the spectrum bins.
- Step 5.
- The mean Doppler frequency is calculated by integrating the mass between fmin’ and fmax’ and the frequency location, where the mass balanced on both sides is taken as the Doppler shift frequency.
- Step 6.
- Finally, vehicle speed is calculated using Equation (1).
3.3. Cross-Correlation Algorithm (XCA)
- Step 1.
- The spectral data is calculated via FFT algorithm.
- Step 2.
- Next, the spectrum is smoothed using a moving averaged filter. This helps to reduce the effects of random peaks in the spectrum.
- Step 3.
- At this stage, one frequency with the largest amplitude assumed to be the mean Doppler frequency. This allows us to grossly estimate the parameter v and consequently the σ of the Gaussian curve.where fa is the frequency component with the largest amplitude. This step does not introduce accuracy deficiency in the final speed estimation.
- Step 4.
- The generated curve is correlated with the Doppler spectrum and the position with the highest correlation is assumed as the mean Doppler frequency. A correlation window can be used to limit the correlation length between the two signals to reduce the algorithm computation time.
- Step 5.
- Finally, vehicle speed is calculated using Equation (1).
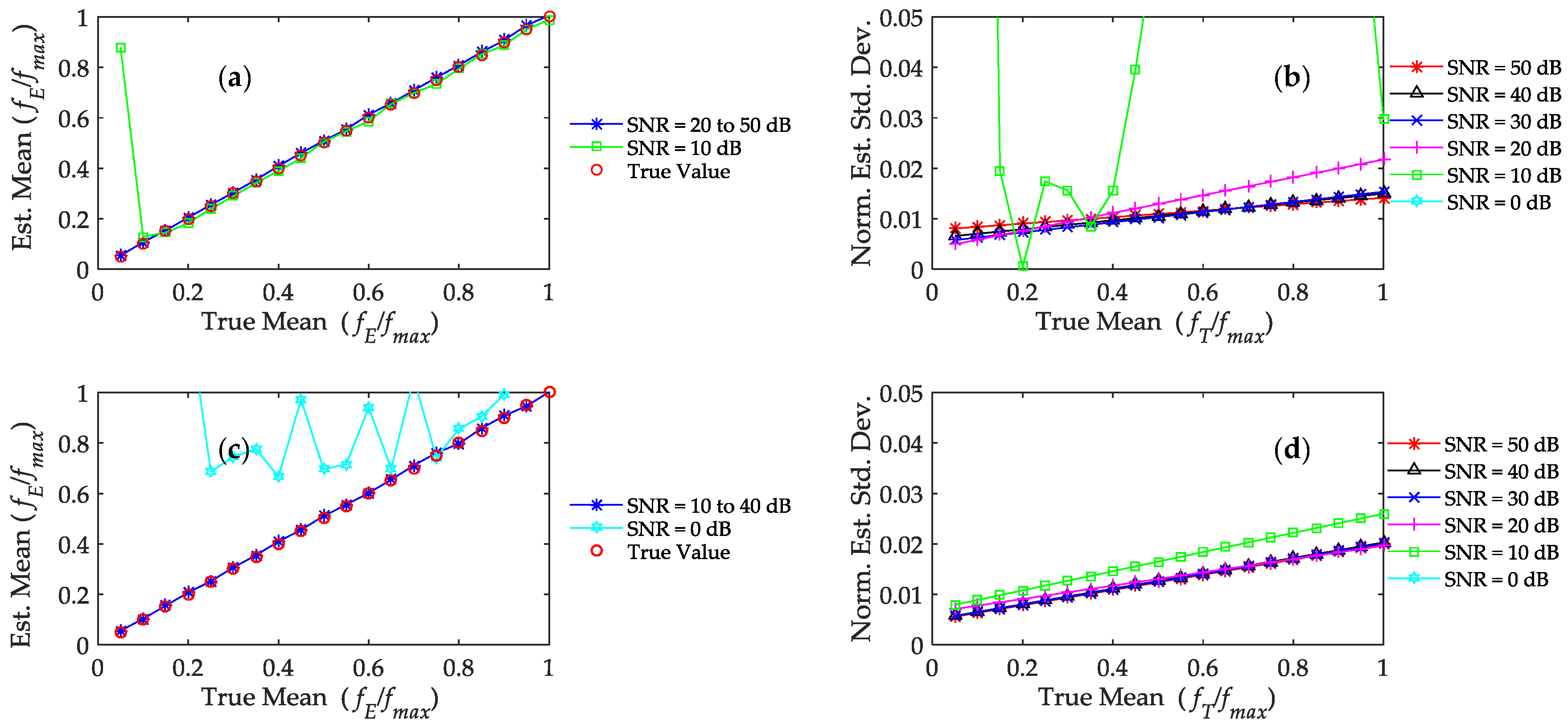
3.4. Evaluation of Bias and Standard Deviation Using Simulated Signal
3.5. Computational Complexity
4. Experimental Data Collection
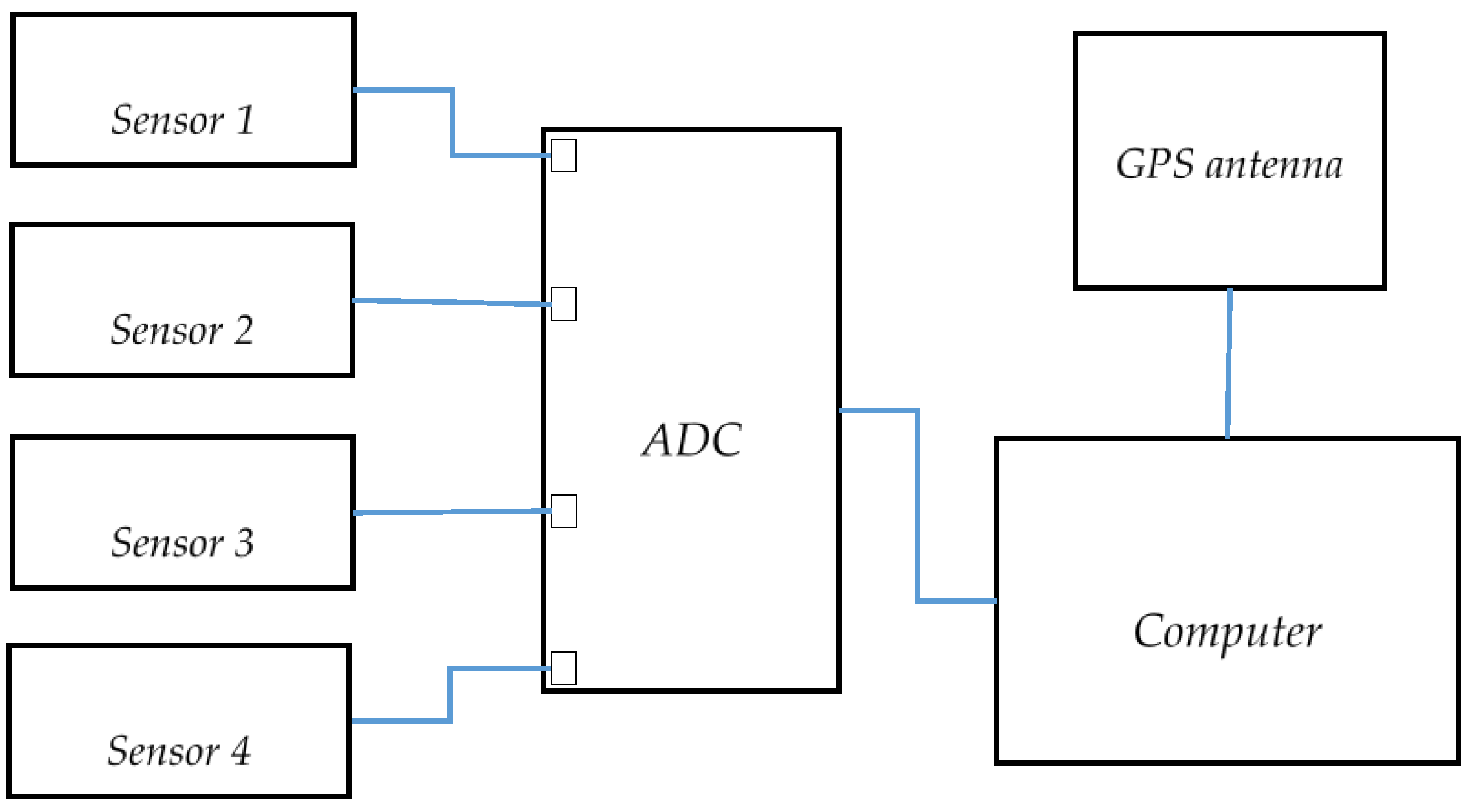
4.1. Data Acquisition System
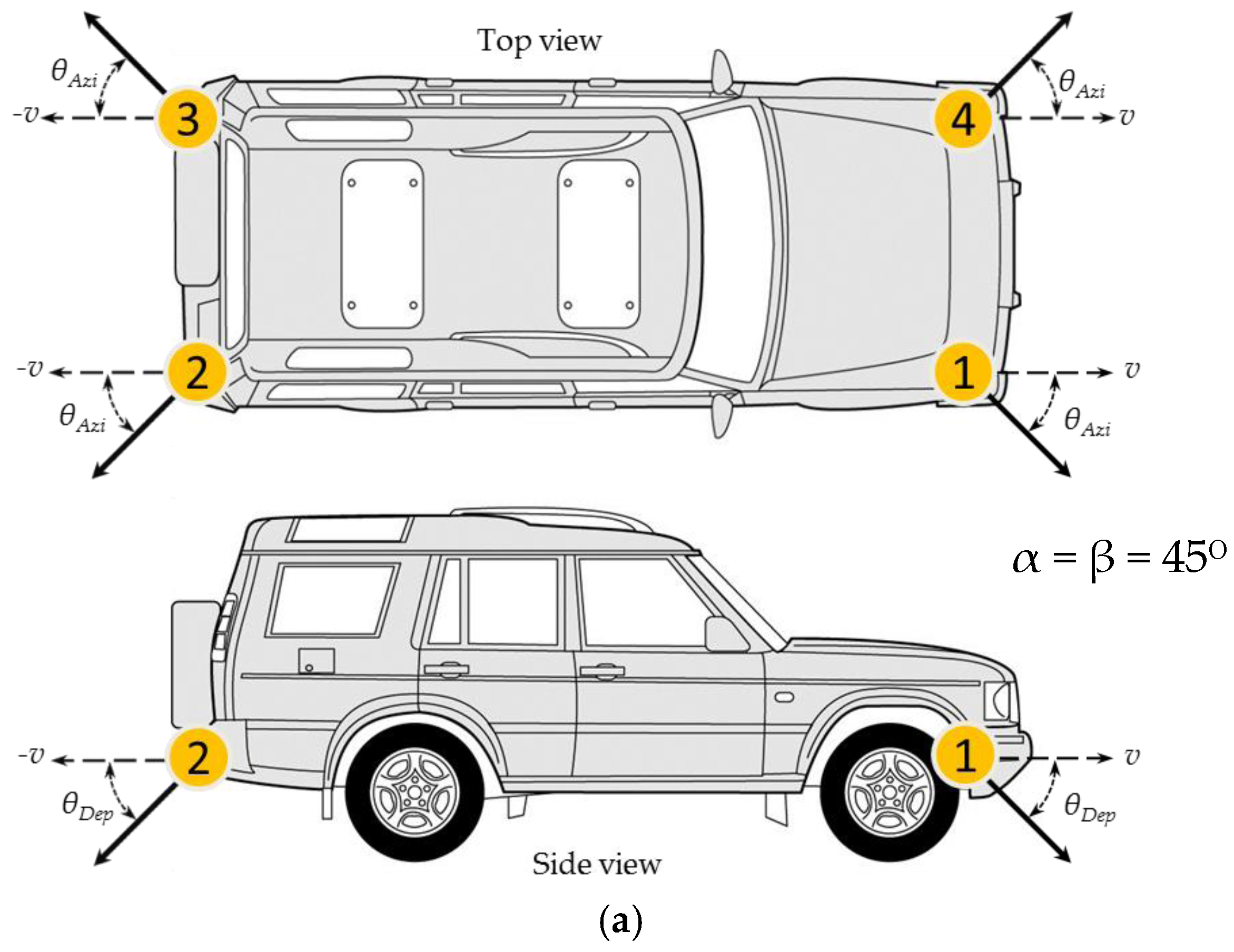
4.2. Janus Configuration and Test Vehicle
4.3. Experimental Site
5. Experimental Results and Discussion
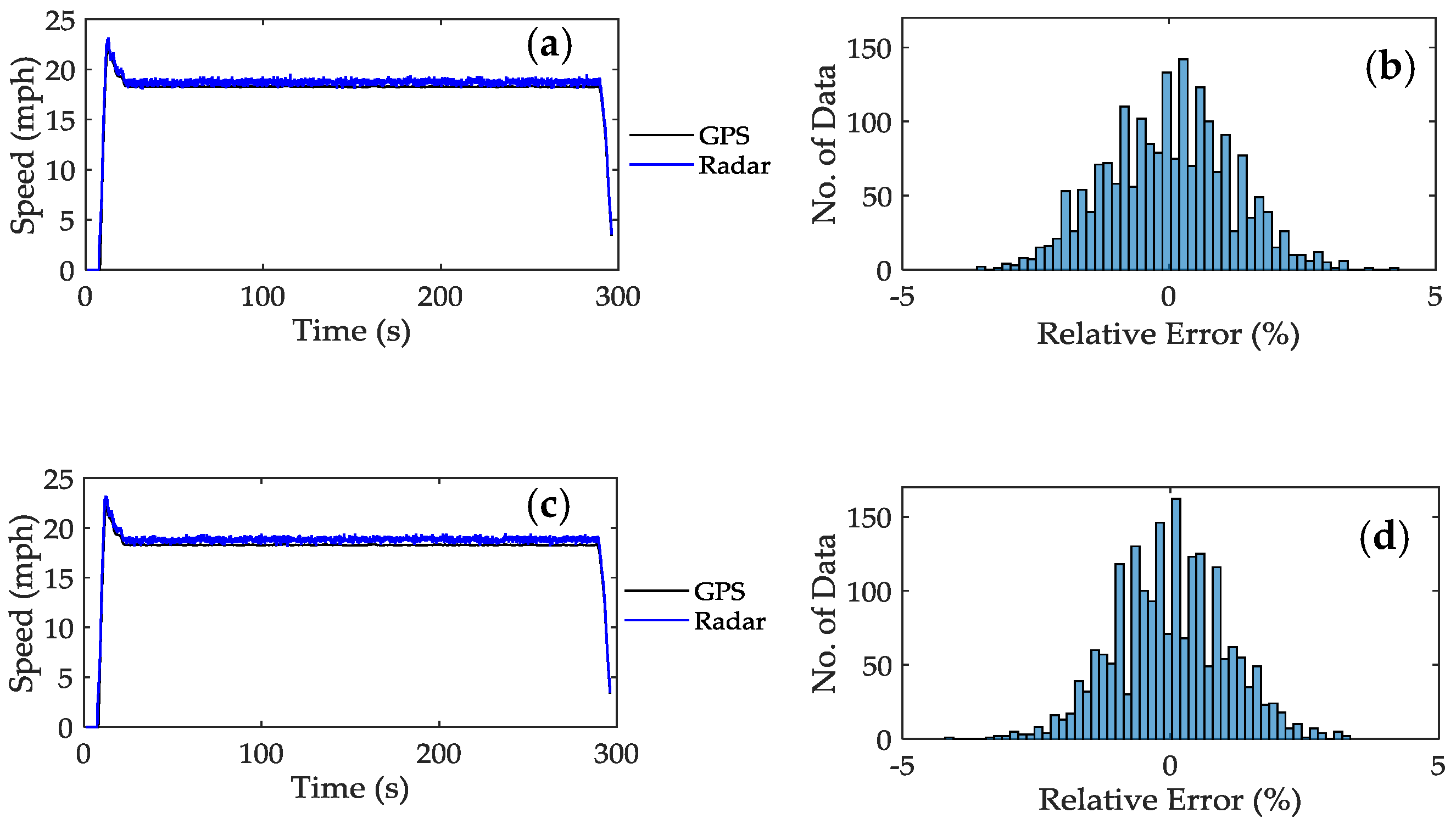
5.1. Test 1: Accuracy of Algorithms at Different Speeds
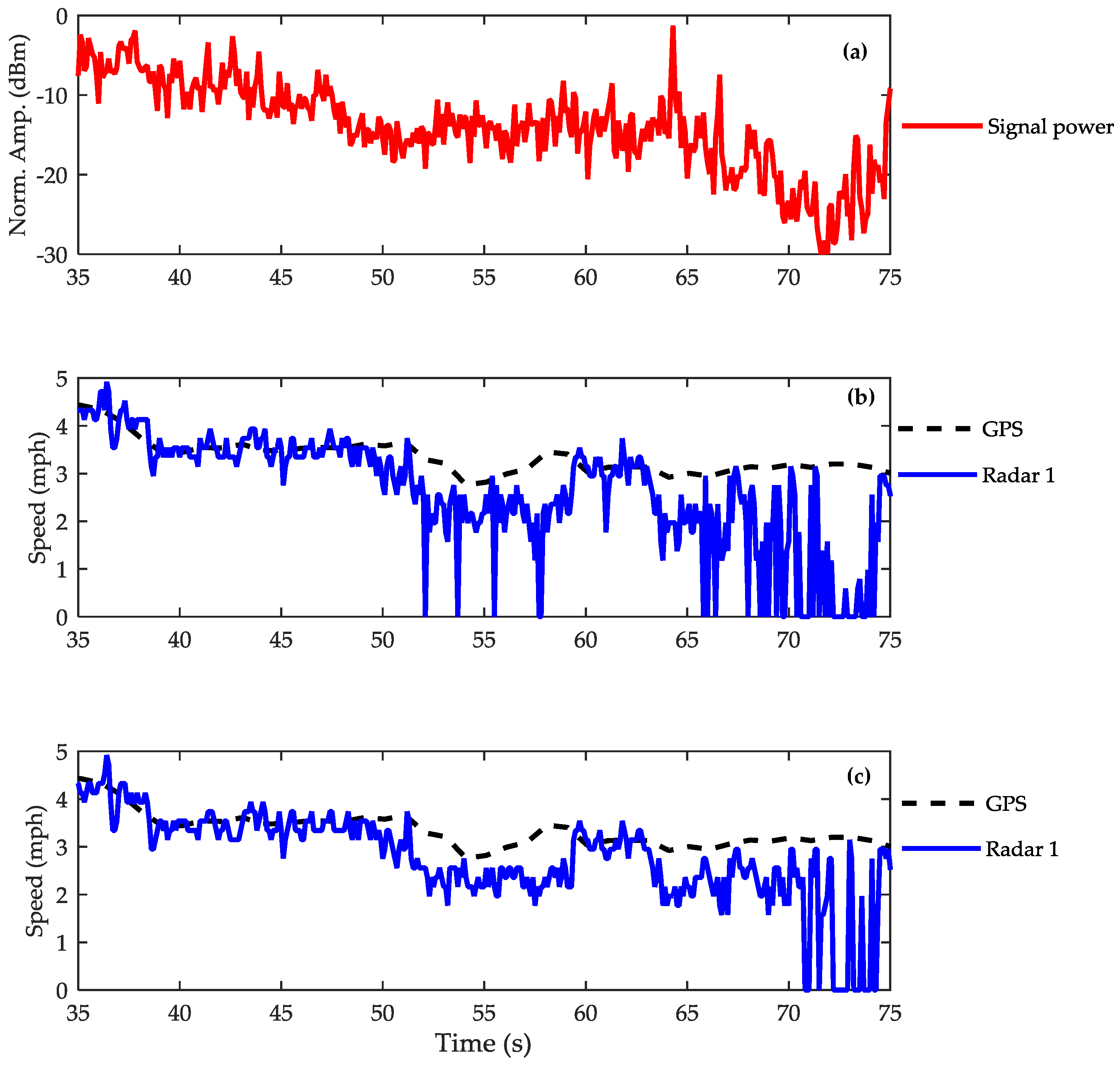
5.2. Test 2: Accuracy of Algorithms on Different Terrain
5.3. Discussion
6. Conclusions
Author Contributions
Conflicts of Interest
References
- Tanelli, M.; Savaresi, S.M.; Cantoni, C. Longitudinal vehicle speed estimation for traction and braking control systems. In Proceedings of the 2006 IEEE Conference on Computer Aided Control System Design, 2006 IEEE International Conference on Control Applications, 2006 IEEE International Symposium on Intelligent Control, Munich, Germany, 4–6 October 2006; pp. 2790–2795. [Google Scholar]
- Shanshan, M. A vehicle laser Doppler velocimeter configured with three transmitting beams. In Proceedings of the 2013 International Conference on Optoelectronics and Microelectronics (ICOM), Harbin, China, 7–9 September 2013; pp. 170–173. [Google Scholar]
- Xu, C.; Daniel, L.; Hoare, E.; Sizov, V.; Cherniakov, M. Comparison of speed over ground estimation using acoustic and radar Doppler sensors. In Proceedings of the 11th European Radar Conference (EuRAD), Rome, Italy, 8–10 October 2014; pp. 189–192. [Google Scholar]
- Imou, K.; Ishida, M.; Okamoto, T.; Kaizu, Y.; Sawamura, A.; Sumida, N. Ultrasonic Doppler Sensor for Measuring Vehicle Speed in Forward and Reverse Motions Including Low Speed Motions. Agric. Eng. Int. CIGR J. 2001, 3, 7–13. [Google Scholar]
- O’Kane, T.; Ringwood, J.V. Vehicle speed estimation using GPS/RISS (Reduced Inertial Sensor System). In Proceedings of the 24th IET Irish Signals and Systems Conference (ISSC 2013), Letterkenny, Ireland, 20–21 June 2013; pp. 1–6. [Google Scholar]
- Rasshofer, R.H.; Gresser, K. Automotive Radar and Lidar Systems for Next Generation Driver Assistance Functions. Adv. Radio Sci. 2005, 3, 205–209. [Google Scholar] [CrossRef]
- Borenstein, J.; Koren, Y. Noise rejection for ultrasonic sensors in mobile robot applications. In Proceedings of the 1992 IEEE International Conference on Robotics and Automation, Nice, France, 12–14 May 1992; pp. 1727–1732. [Google Scholar]
- Fleming, W.J. New Automotive Sensors—A Review. IEEE Sens. J. 2008, 8, 1900–1921. [Google Scholar] [CrossRef]
- Fleming, W.J. Overview of automotive sensors. IEEE Sens. J. 2001, 1, 296–308. [Google Scholar] [CrossRef]
- Dixit, R. Microwave and millimeter-wave applications in automotive electronics. In Proceedings of the IEEE MTT-S International Microwave Symposium Digest, San Franscisco, CA, USA, 17–21 June 1996; pp. 31–33. [Google Scholar]
- Meinel, H.H. Commercial applications of millimeterwaves: History, present status, and future trends. IEEE Trans. Microw. Theory Tech. 1995, 43, 1639–1653. [Google Scholar] [CrossRef]
- Russell, M.E.; Drubin, C.A.; Marinilli, A.S.; Woodington, W.G.; Checcolo, M.J.D. Integrated automotive sensors. IEEE Trans. Microw. Theory Tech. 2002, 50, 674–677. [Google Scholar] [CrossRef]
- Skolnik, M.I. Radar Handbook, 3rd ed.; McGraw-Hill Education: New York, NY, USA, 2008. [Google Scholar]
- Gresham, I.; Jenkins, A.; Egri, R.; Eswarappa, C.; Kinayman, N.; Jain, N.; Bennett, J. Ultra-wideband radar sensors for short-range vehicular applications. IEEE Trans. Microw. Theory Tech. 2004, 52, 2105–2122. [Google Scholar] [CrossRef]
- Woods, G.S.; Maskell, D.L.; Mahoney, M.V. A high accuracy microwave ranging system for industrial applications. IEEE Trans. Instrum. Meas. 1993, 42, 812–816. [Google Scholar] [CrossRef]
- Zhang, H.; Li, L.; Wu, K. Software-Defined Six-Port Radar Technique for Precision Range Measurements. IEEE Sens. J. 2008, 8, 1745–1751. [Google Scholar] [CrossRef]
- Kehrbeck, J.; Heidrich, E.; Wiesbeck, W. Microwave Front End for True Ground Speed Measurements. J. Navig. 1995, 48, 88–96. [Google Scholar] [CrossRef]
- Zeng, Y.; Xu, J.; Peng, D. Radar velocity-measuring system design and computation algorithm based on ARM processor. In Proceedings of the 2010 8th World Congress on Intelligent Control and Automation (WCICA), Jinan, China, 7–9 July 2010; pp. 5352–5357. [Google Scholar]
- Kleinhempel, W. Automobile Doppler speedometer. In Proceedings of the IEEE-IEE Vehicle Navigation and Information Systems Conference, Ottawa, ON, Canada, 12–15 October 1993; pp. 509–512. [Google Scholar]
- Hyltin, T.M.; Fuchser, T.D.; Tyson, H.B.; Regueiro, W.R. Vehicular Radar Speedometer; SAE Technical Paper: Warrendale, PA, USA, 1973. [Google Scholar]
- Berger, F.B. The Nature of Doppler Velocity Measurement. IRE Trans. Aeronaut. Navig. Electron. 1957, 4, 103–112. [Google Scholar] [CrossRef]
- Egawa, A. A Microwave Doppler Radar Velocity Meter for Construction Machinery; SAE Technical Paper: Warrendale, PA, USA, 1982. [Google Scholar]
- Hines, M.E.; Zelubowski, S.A. Conditions affecting the accuracy of speed measurements by low power MM-wave CW Doppler radar. In Proceedings of the IEEE 42nd Vehicular Technology Conference, Denver, CO, USA, 10–13 May 1992; pp. 1046–1050. [Google Scholar]
- Cote, G.L.; Fox, M.D. Comparison of zero crossing counter to FFT spectrum of ultrasound Doppler. IEEE Trans. Biomed. Eng. 1988, 35, 498–502. [Google Scholar] [CrossRef] [PubMed]
- Shmaliy, Y. Continuous-Time Signals; Springer: Dordrecht, The Netherlands, 2006. [Google Scholar]
- Dybedal, J. Doppler Radar Speed Measurement Based on a 24 GHz Radar Sensor; Institutt for Elektronikk og Telekommunikasjon: Trondheim, Sweden, 2013. [Google Scholar]
- Beasley, P.D.L. Doppler Radar Speed Sensor. U.S. Patent US5,204,682 A, 20 April 1993. [Google Scholar]
- Häkli, J.; Säily, J.; Koivisto, P.; Huhtinen, I.; Dufva, T.; Rautiainen, A.; Nummila, K. Road surface condition detection using 24 GHz automotive radar technology. In Proceedings of the 2013 14th International Radar Symposium (IRS), Dresden, Germany, 19–21 June 2013; pp. 702–707. [Google Scholar]
- Reed, J. Doppler Navigator Land-Water Corrector. U.S. Patent US3,077,594 A, 12 February 1963. [Google Scholar]
- Nagasaku, T.; Kogo, K.; Shinoda, H.; Kondoh, H.; Muto, Y.; Yamamoto, A.; Yoshikawa, T. 77GHz low-cost single-chip radar sensor for automotive ground speed detection. In Proceedings of the 2008 IEEE Compound Semiconductor Integrated Circuits Symposium, Monterey, CA, USA, 12–15 October 2008; pp. 1–4. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No | FFT Length | Duration of Samples (ms) | CMA (ms) | XCA (ms) |
|---|---|---|---|---|
| 1 | 3125 | 100 | 0.01 | 0.6 |
| 2 | 6250 | 250 | 0.01 | 0.8 |
| 3 | 12,500 | 500 | 0.03 | 1 |
| 4 | 25,000 | 1000 | 0.04 | 2 |
| Speed | 10 mph | 20 mph | 30 mph | 40 mph | 70 mph |
| XCA | 1.2% | 1.0% | 0.7% | 0.6% | 0.5% |
| CMA | 1.4% | 1.0% | 0.9% | 0.8% | 0.8% |
| (a) | |||||
| Speed | 10 mph | 20 mph | 30 mph | 40 mph | 70 mph |
| XCA | 5.5% | 4.1% | 3.0% | 2.3% | 1.9% |
| CMA | 6.7% | 4.8% | 4.7% | 6.2% | 3.1% |
| (b) | |||||
| Speed | 10 mph | 20 mph | 30 mph | 40 mph | 70 mph |
| XCA | 50.6% | 57.9% | 77.0% | 85.1% | 89.0% |
| CMA | 42.2% | 55.0% | 63.4% | 70.8% | 71.4% |
| (c) | |||||
| Surface | Visual Description |
|---|---|
| Grass | Grass-covered surface with grass height approximately between 1 and 7 cm. The road surface is approximately even |
| Bumpy | Aged asphalt road with many potholes and an uneven surface. The depth of the potholes is approximately between 5 and 7 cm |
| Wet Dirt | Dirt road consisting largely of dirt and small gravel. The surface is uneven and has potholes with depth approximately between 3 and 5 cm and filled with rain water |
| Water | A 5-m width dirt road completely covered with murky water of depth approximately 10 cm |
| Grass | Bumpy | Wet Dirt | Water | |
| XCA | 5.0% | 6.4% | 6.7% | 8.0% |
| CMA | 5.0% | 6.2% | 8.2% | 29.2% |
| (a) | ||||
| Grass | Bumpy | Wet Dirt | Water | |
| XCA | 18.7% | 23.1% | 34.0% | 35.1% |
| CMA | 18.4% | 21.5% | 40.3% | 122.0% |
| (b) | ||||
| Grass | Bumpy | Wet Dirt | Water | |
| XCA | 57.1% | 47.0% | 46.0% | 34.0% |
| CMA | 59.6% | 49.4% | 41.4% | 19.0% |
| (c) | ||||
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shariff, K.K.M.; Hoare, E.; Daniel, L.; Antoniou, M.; Cherniakov, M. Comparison of Adaptive Spectral Estimation for Vehicle Speed Measurement with Radar Sensors. Sensors 2017, 17, 751. https://doi.org/10.3390/s17040751
Shariff KKM, Hoare E, Daniel L, Antoniou M, Cherniakov M. Comparison of Adaptive Spectral Estimation for Vehicle Speed Measurement with Radar Sensors. Sensors. 2017; 17(4):751. https://doi.org/10.3390/s17040751
Chicago/Turabian StyleShariff, Khairul Khaizi Mohd, Edward Hoare, Liam Daniel, Michail Antoniou, and Mikhail Cherniakov. 2017. "Comparison of Adaptive Spectral Estimation for Vehicle Speed Measurement with Radar Sensors" Sensors 17, no. 4: 751. https://doi.org/10.3390/s17040751
APA StyleShariff, K. K. M., Hoare, E., Daniel, L., Antoniou, M., & Cherniakov, M. (2017). Comparison of Adaptive Spectral Estimation for Vehicle Speed Measurement with Radar Sensors. Sensors, 17(4), 751. https://doi.org/10.3390/s17040751