
Optimum Design Rules for CMOS Hall Sensors

 ,
,  ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
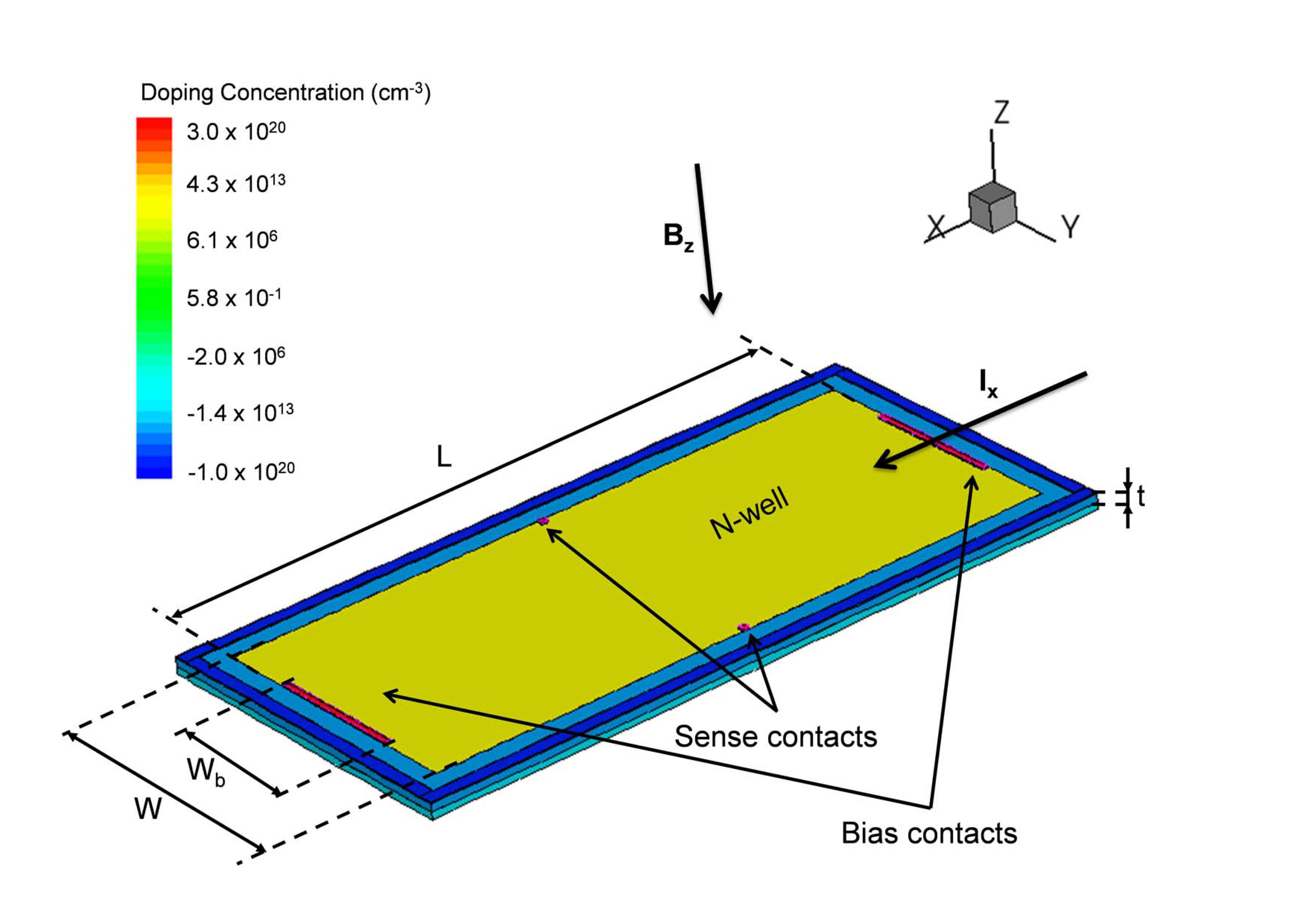
2.1. Devices
2.2. Theory
2.3. Numerical Model
3. Experimental Section
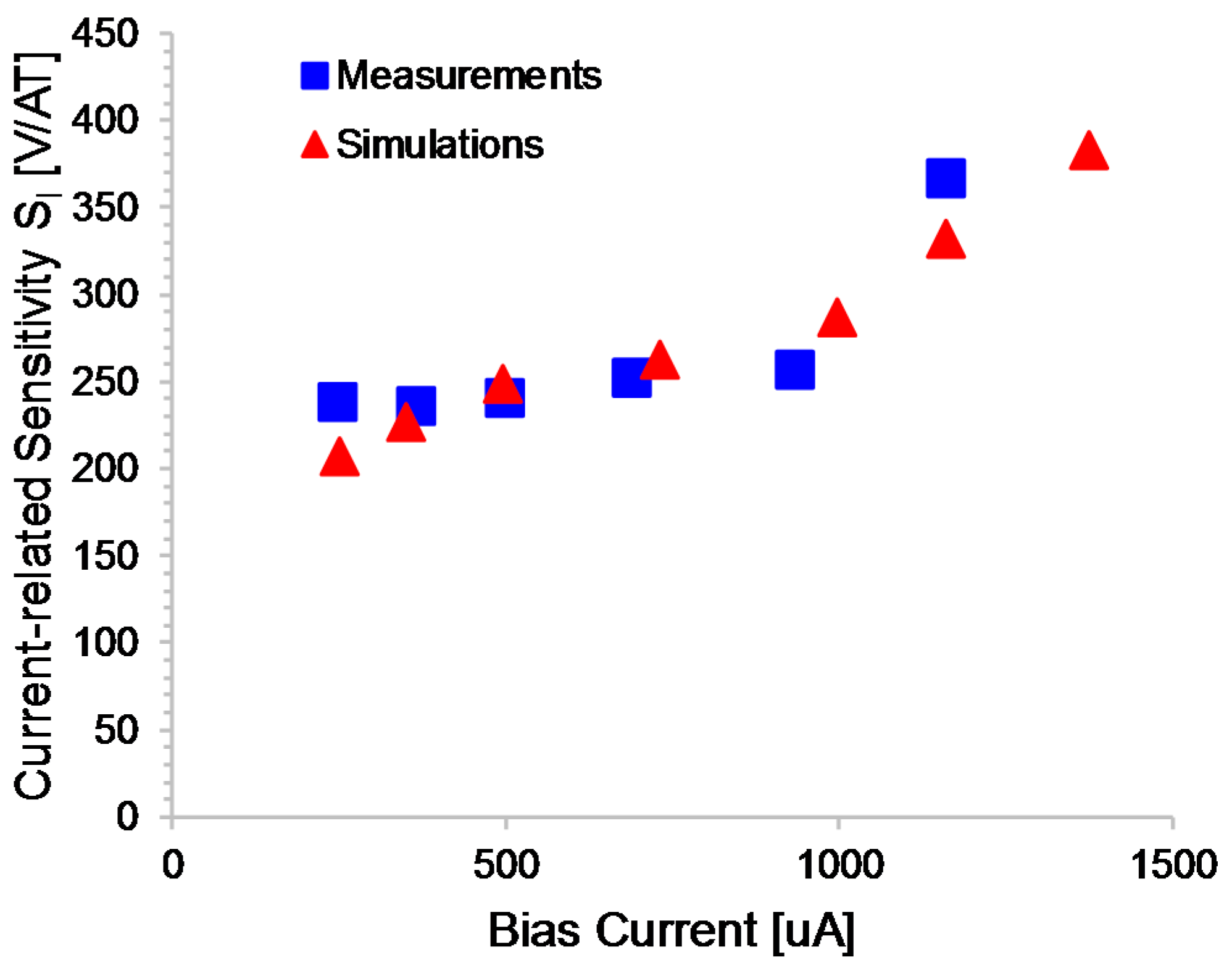
3.1. Current-Related Sensitivity
3.2. Power Consumption
3.3. Optimum Square Dimension
3.4. Dimension of Contacts
3.5. Bias Current
3.6. Measurement Comparison
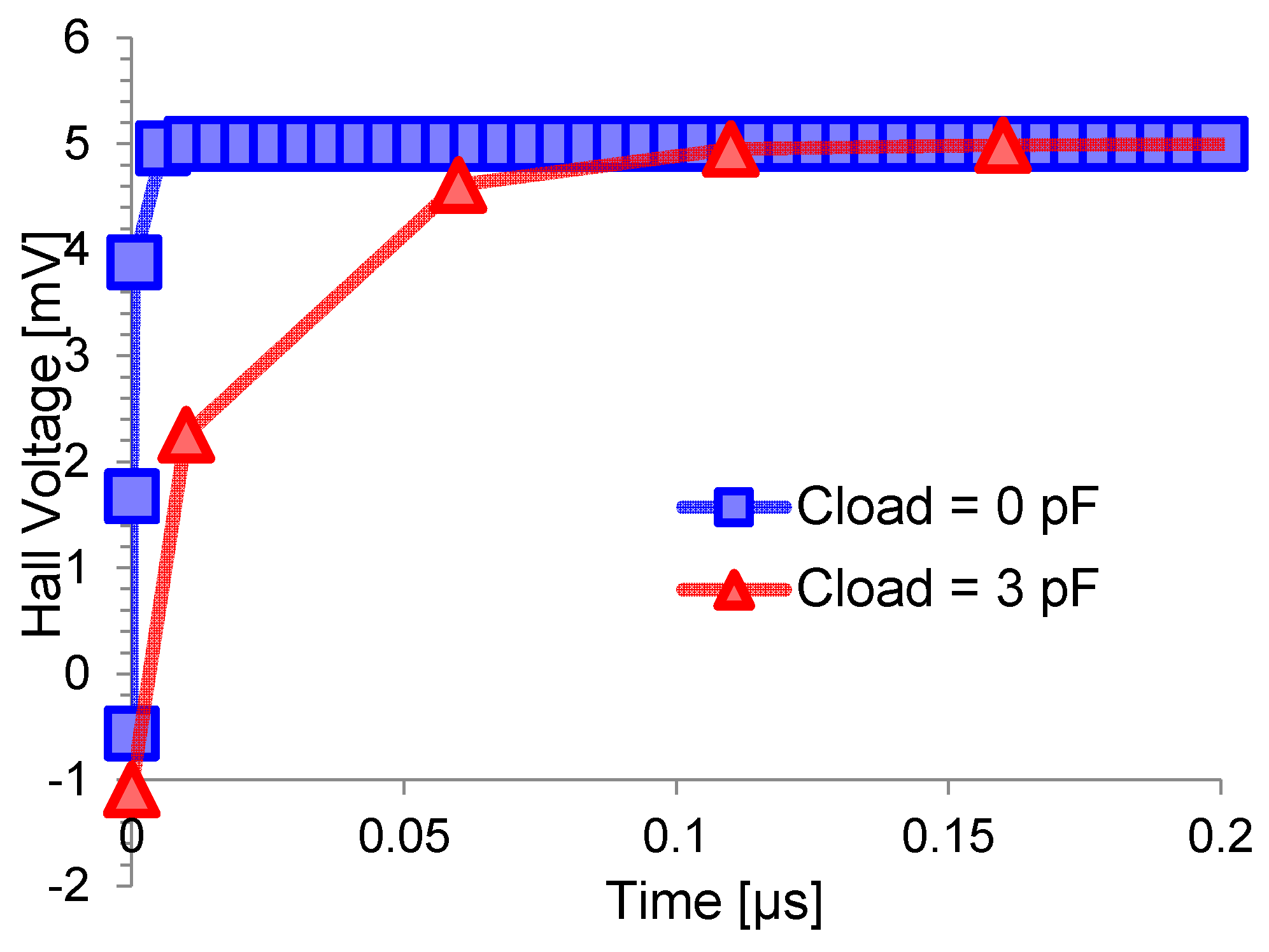
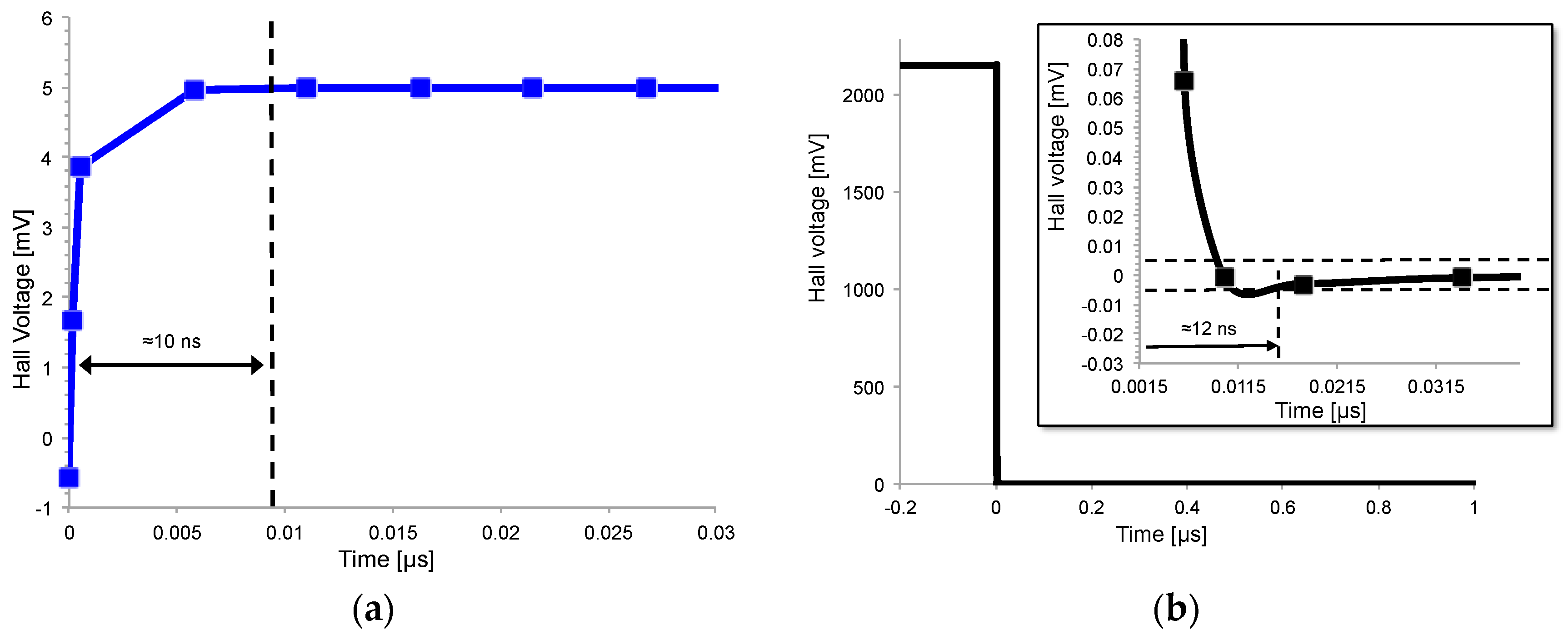
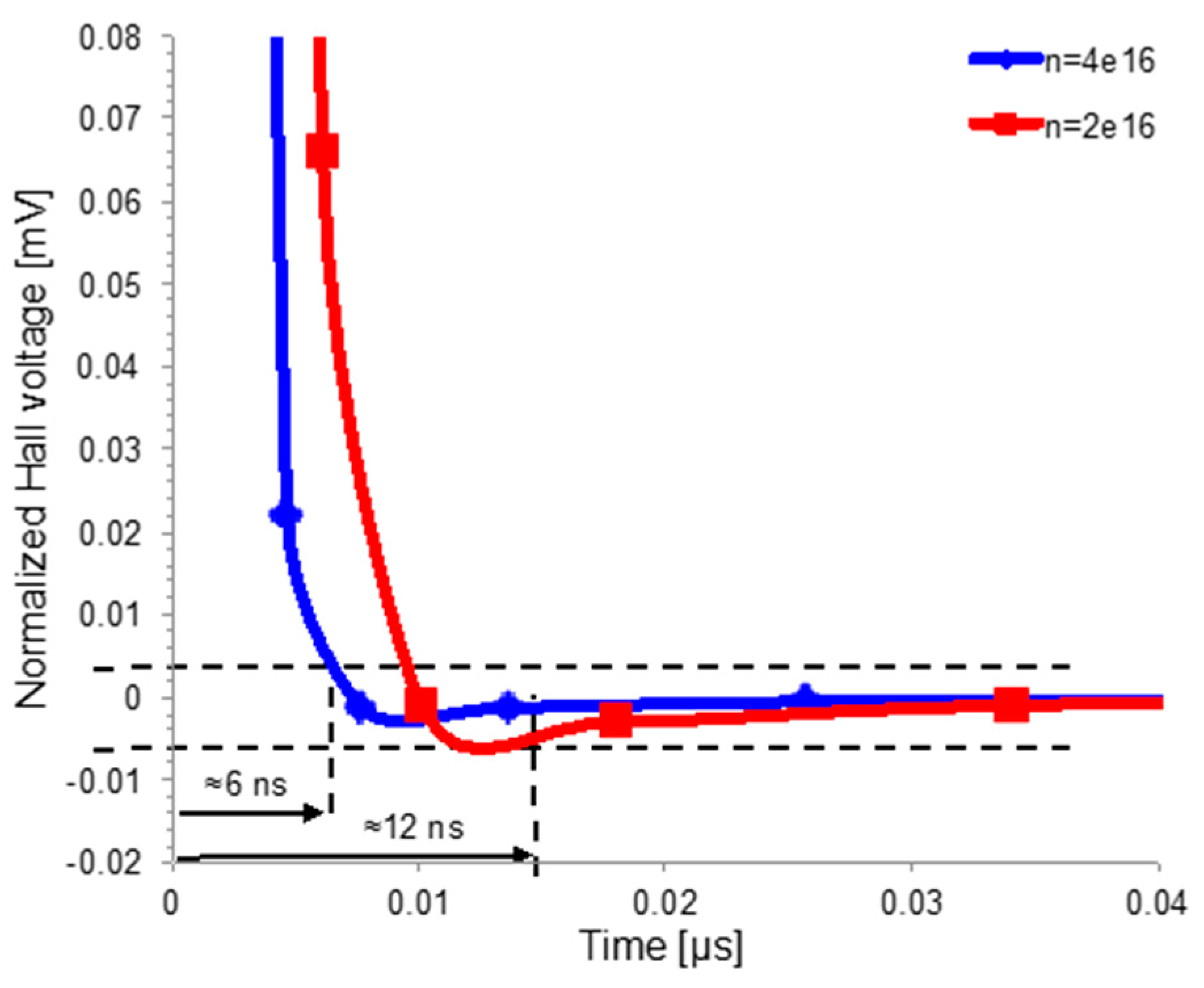
3.7. Bandwidth
4. Discussion
5. Conclusions
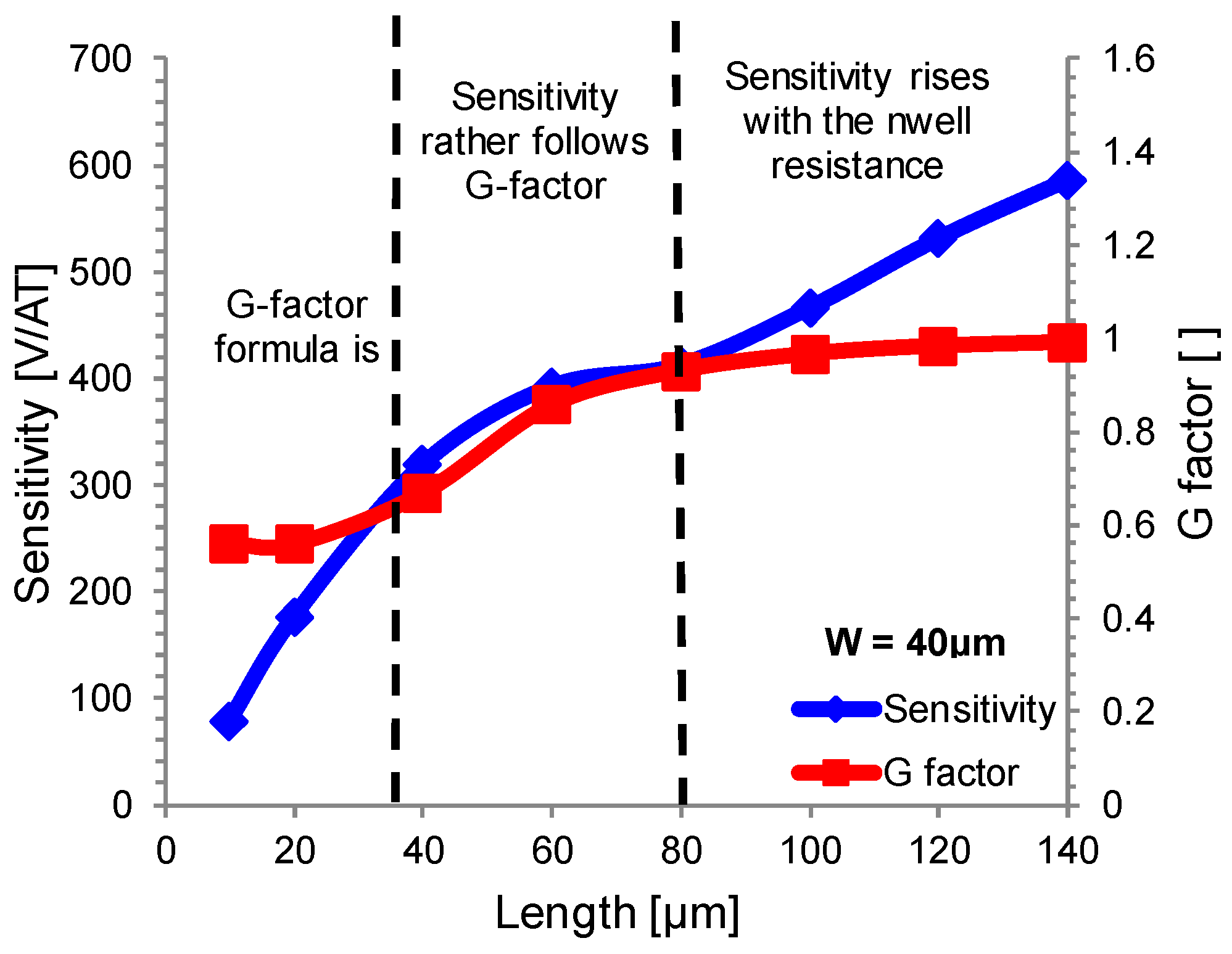
- Geometric characteristics of the probe affect the current-related sensitivity SI by means of both direct and indirect effects; which are associated with the geometrical correction factor G and the bias-induced change of the well resistivity, respectively.
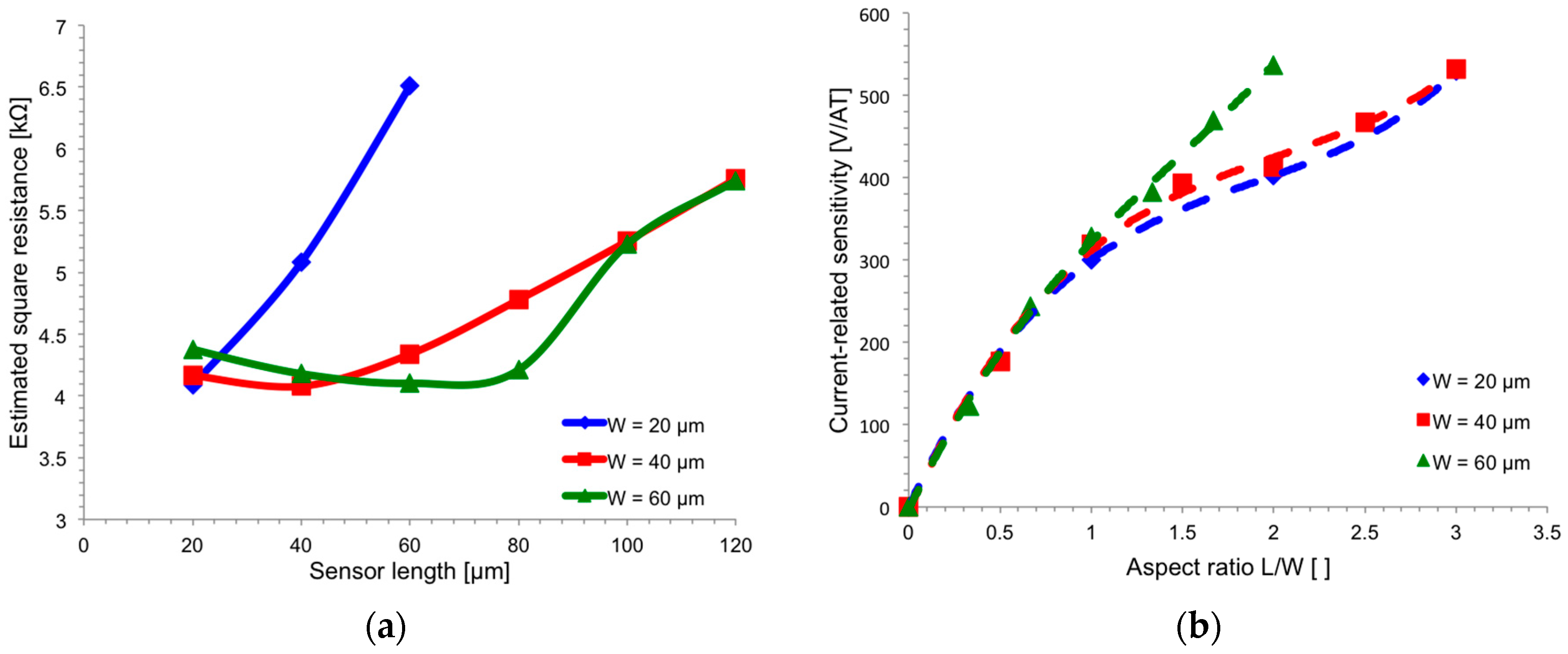
- Square sensors, or at least symmetrical geometries, show the optimum sensitivity/power trade-off, i.e., the best energy efficiency. This is a good result since symmetrical sensors easily allow offset cancellation through spinning current technique.
- Optimum width of bias contacts is half the sensor width.
- Sense contacts should be as small as possible to have a punctual measure, hence maximize the sensitivity. They must be placed in the middle of the sensor along the bias axis (x-axis) and as far as possible from the center of the sensor along the orthogonal axis (y-axis).
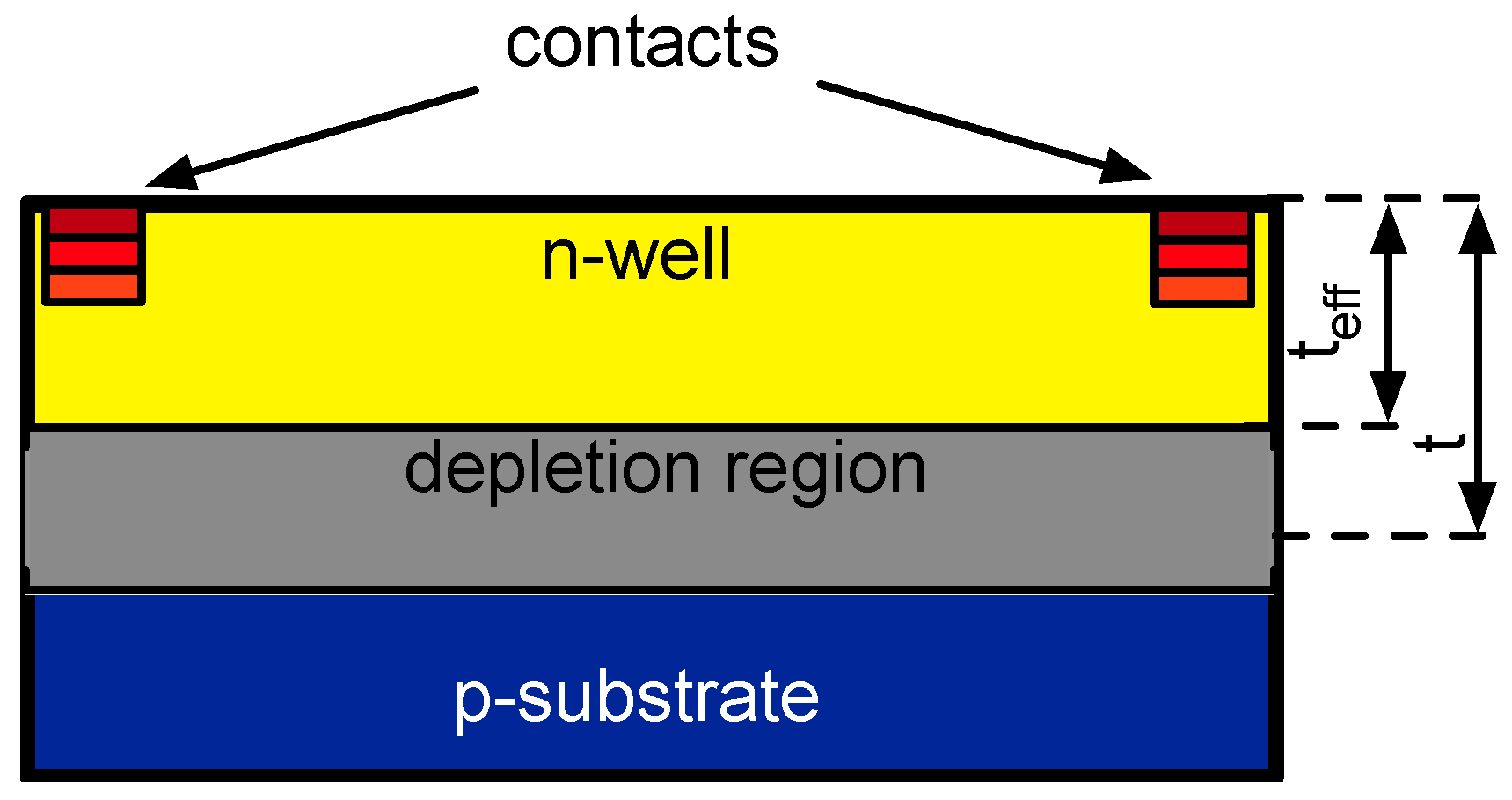
- The intrinsic settling time of Hall sensor can be modeled as an RC time, where R is the resistivity of the n-well and C is the total capacitive effect acting on sense contacts. This is an important result since it reveals that the relatively slow responses of Hall sensor implementations are due to the readout architecture and not to physical constraints of the device. It also outlines an important sensitivity/bandwidth trade-off which is set by the resistivity of the n-well.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Popovic, R.S.; Banjevic, M. High resolution Hall magnetic transducers. Presented at the International Autumn School on High Sensitivity Magnetometers, Blainville sur Mer, Normandy, France, 24–28 September 2007. [Google Scholar]
- Steiner, R.; Haberli, A.; Steiner, F.-P.; Baltes, H. Offset reduction in Hall devices by continuous spinning current method. In Proceedings of the IEEE International Solid State Sensors and Actuators Conference (Transducers ‘97), Chicago, IL, USA, 16–19 June 1997; Volume 1, pp. 381–384. [Google Scholar]
- Blanchard, H.; de Raad Iseli, C.; Popovic, R.S. Compensation of the temperature-dependent offset drift of a Hall sensor. Sens. Actuators A Phys. 1997, 60, 10–13. [Google Scholar] [CrossRef]
- Müller-Schwanneke, C.; Jost, F.; Marx, K.; Lindenkreuz, S.; von Klitzing, K. Offset reduction in silicon Hall sensors. Sens. Actuators A Phys. 2000, 81, 18–22. [Google Scholar] [CrossRef]
- Allegretto, W.; Nathan, A.; Baltes, H. Numerical Analysis of Magnetic-Field-Sensitive Bipolar Devices. IEEE Trans. Comput. Des. 1991, 10, 501–511. [Google Scholar] [CrossRef]
- Riccobene, C.; Gärtner, K.; Wachutka, G.; Baltes, H.; Fichtner, W. First Three-Dimensional Numerical Analysis of Magnetic Vector Probe. In Proceedings of the IEDM, San Francisco, CA, USA, 11–14 December 1994; pp. 727–730. [Google Scholar]
- Synopsys. Sentaurus Device User Guide; Synopsys: Mountain View, CA, USA, 2010. [Google Scholar]
- Palumbo, V.; Marchesi, M.; Chiesi, V.; Paci, D.; Iuliano, P.; Toia, F.; Casoli, F.; Ranzieri, P.; Albertini, F.; Morelli, M. Hall current sensor IC with integrated Co-based alloy thin film magnetic concentrator. EPJ Web Conf. 2013, 40, 16002. [Google Scholar] [CrossRef]
- Sander, C.; Leube, C.; Paul, O. Sensors and Actuators A: Physical Compact two-dimensional CMOS Hall sensor based on switchable configurations of four three-contact elements. Sens. Actuators A Phys. 2016, 248, 281–289. [Google Scholar] [CrossRef]
- Lyu, F.; Liu, X.; Ding, Y.; Toh, E.-H.; Zhang, Z.; Pan, Y.; Wang, Z.; Li, C.; Li, L.; Sha, J.; et al. Influences of an Aluminum Covering Layer on the Performance of Cross-Like Hall Devices. Sensors 2016, 16, 106. [Google Scholar] [CrossRef] [PubMed]
- Jiang, J.; Makinwa, K. 11.3 A hybrid multipath CMOS magnetic sensor with 210 µTrms resolution and 3 MHz bandwidth for contactless current sensing. In Proceedings of the IEEE International Solid-State Circuits Conference, San Francisco, CA, USA, 31 January–4 February 2016; Digest of Technical Paper. IEEE: Piscataway, NJ, USA, 2016; pp. 204–205. [Google Scholar]
- Crescentini, M.; Biondi, M.; Bennati, M.; Alberti, P.; Luciani, G.; Tamburini, C.; Pizzotti, M.; Romani, A.; Tartagni, M.; Bellasi, D.; et al. A 2 MS/s 10A Hall current sensor SoC with digital compressive sensing encoder in 0.16 µm BCD. In Proceedings of the IEEE European Solid-State Circuits Conference, Lausanne, Switzerland, 12–15 September 2016; pp. 393–396. [Google Scholar]
- Heidari, H.; Bonizzoni, E.; Gatti, U.; Maloberti, F. A CMOS Current-Mode Magnetic Hall Sensor with Integrated Front-End. IEEE Trans. Circuits Syst. I Regul. Pap. 2015, 62, 1270–1278. [Google Scholar] [CrossRef]
- Huang, H.; Wang, D.; Xu, Y. A Monolithic CMOS Magnetic Hall Sensor with High Sensitivity and Linearity Characteristics. Sensors 2015, 15, 27359–27373. [Google Scholar] [CrossRef] [PubMed]
- Heidari, H.; Bonizzoni, E.; Gatti, U.; Maloberti, F. A 0.18-um CMOS current-mode Hall magnetic sensor with very low bias current and high sensitive front-end. In Proceedings of the 2014 IEEE Sensors, Valencia, Spain, 2–5 November 2014; pp. 1467–1470. [Google Scholar]
- Randjelovic, Z.B.; Kayal, M.; Popovic, R.; Blanchard, H. Highly sensitive Hall magnetic sensor microsystem in CMOS technology. IEEE J. Solid-State Circuits 2002, 37, 151–159. [Google Scholar] [CrossRef]
- Paun, M.; Sallese, J.; Kayal, M. Offset and drift analysis of the Hall effect sensors. Dig. J. Nanomater. Biostruct. 2012, 7, 883–891. [Google Scholar]
- Jankovic, N.; Aleksic, S.; Pantic, D. Simulation and Modeling of Integrated Hall Sensor Devices. In Proceedings of the Small Systems Simulation Symposium 2012, Nis, Serbia, 12–14 February 2012. [Google Scholar]
- Paun, M.-A.; Sallese, J.-M.; Kayal, M. Geometry influence on the Hall effect devices performance. UPB Sci. Bull. Ser. A Appl. Math. Phys. 2010, 72, 257–271. [Google Scholar]
- Paun, M.-A.; Sallese, J.-M.; Kayal, M. Comparative study on the performance of five different Hall effect devices. Sensors 2013, 13, 2093–2112. [Google Scholar] [CrossRef] [PubMed]
- Paun, M.-A.; Sallese, J.-M.; Kayal, M. Evaluation of characteristic parameters for high performance hall cells. Microelectron. J. 2014, 45, 1194–1201. [Google Scholar] [CrossRef]
- Paun, M.; Sallese, J.; Kayal, M. Hall Effect Sensors Performance Investigation Using Three-Dimensional Simulations. In Proceedings of the 18th International Conference—Mixed Design of Integrated Circuits and Systems, MIXDES 2011, Gillwice, Poland, 16–18 June 2011; pp. 1–6. [Google Scholar]
- Pastre, M.; Kayal, M.; Blanchard, H. A Hall Sensor Analog Front End for Current Measurement with Continuous Gain Calibration. IEEE Sens. J. 2007, 7, 860–867. [Google Scholar] [CrossRef]
- Ruther, P.; Schiller, U.; Janke, R.; Paul, O. Thermomagnetic residual offset in integrated hall plates. IEEE Sens. J. 2003, 3, 693–699. [Google Scholar] [CrossRef]
- Popovic, R.S. Hall Effect Devices, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2004. [Google Scholar]
- Demierre, M. Improvements of CMOS Hall Microsystems and Application for Absolute Angular Position Measurements. Doctoral Dissertation, Ecole Polytechnique Federale de Lausanne (EPFL), Lausanne, Switzerland, 2003. [Google Scholar]
- Bilotti, A.; Monreal, G.; Vig, R. Monolithic magnetic Hall sensor using dynamic quadrature offset cancellation. IEEE J. Solid-State Circuits 1997, 32, 829–836. [Google Scholar] [CrossRef]
- Crescentini, M.; Romani, A.; Sangiorgi, E. Physical simulations of response time in Hall sensor devices. In Proceedings of the 2014 IEEE 15th International Conference on Ultimate Integration on Silicon (ULIS), Stockhol, Sweden, 7–9 April 2014; pp. 89–92. [Google Scholar]
- Crescentini, M.; Traverso, P.A.; Alberti, P.; Romani, A.; Marchesi, M.; Cristaudo, D.; Canegallo, R.; Tartagni, M. Experimental characterization of bandwidth limits in hall sensors. In Proceedings of the 21st IMEKO TC-4 International Symposium on Understanding the World through Electrical and Electronic Measurement, and 19th International Workshop on ADC Modelling and Testing, Budapest, Hungary, 7–9 September 2016. [Google Scholar]












© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Crescentini, M.; Biondi, M.; Romani, A.; Tartagni, M.; Sangiorgi, E. Optimum Design Rules for CMOS Hall Sensors. Sensors 2017, 17, 765. https://doi.org/10.3390/s17040765
Crescentini M, Biondi M, Romani A, Tartagni M, Sangiorgi E. Optimum Design Rules for CMOS Hall Sensors. Sensors. 2017; 17(4):765. https://doi.org/10.3390/s17040765
Chicago/Turabian StyleCrescentini, Marco, Michele Biondi, Aldo Romani, Marco Tartagni, and Enrico Sangiorgi. 2017. "Optimum Design Rules for CMOS Hall Sensors" Sensors 17, no. 4: 765. https://doi.org/10.3390/s17040765
APA StyleCrescentini, M., Biondi, M., Romani, A., Tartagni, M., & Sangiorgi, E. (2017). Optimum Design Rules for CMOS Hall Sensors. Sensors, 17(4), 765. https://doi.org/10.3390/s17040765