
Analysis of Optimal Sensor Positions for Activity Classification and Application on a Different Data Collection Scenario

Abstract
:1. Introduction
- To investigate three different factors that affect ADL classification, i.e. sensor positions, features, and classification models.
- To explore the possibility of applying a model trained from data collected in a different experimental setting (e.g., a subject group, a sampling rate, and hardware).
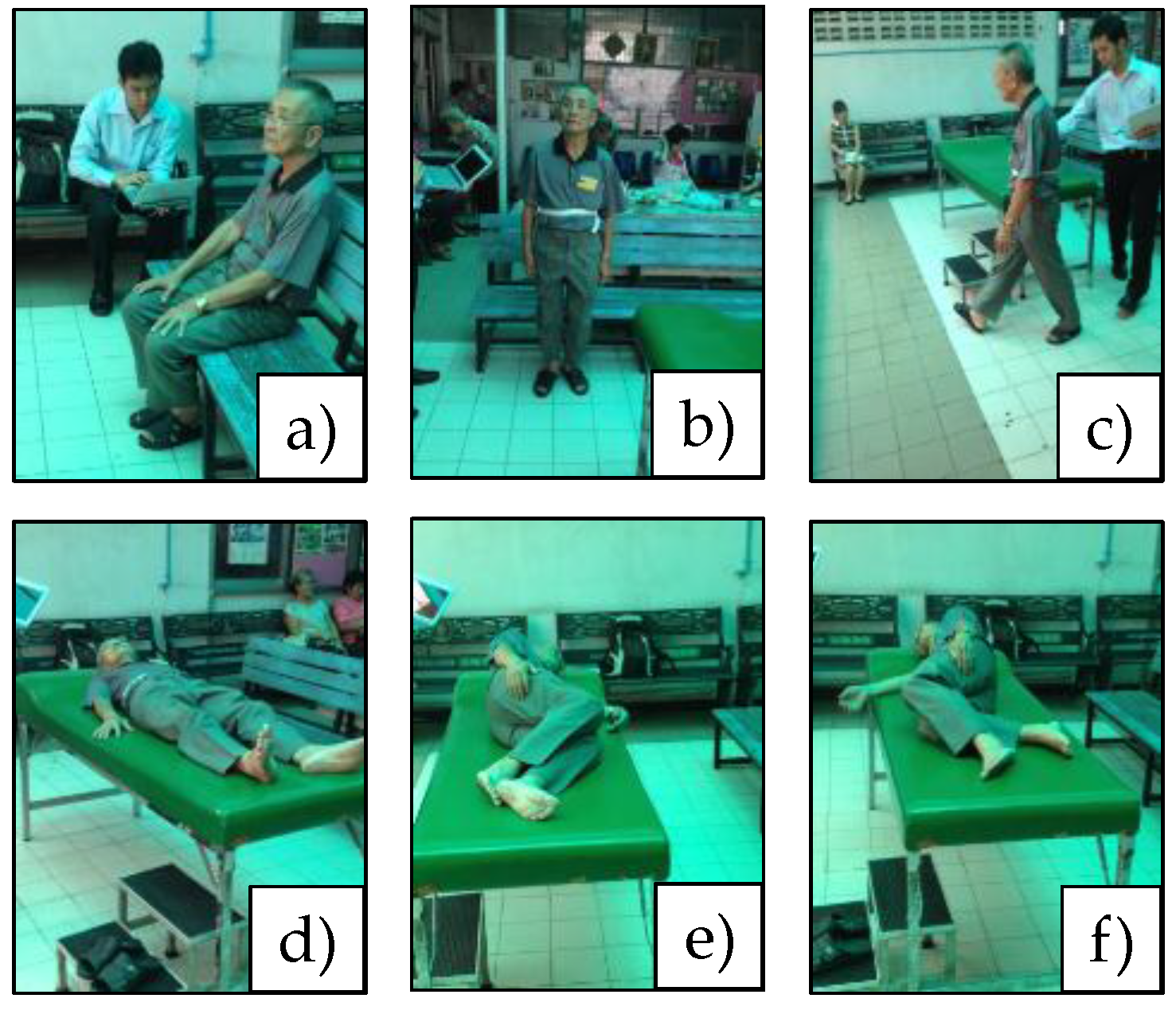
2. Data Descriptions
3. Data Analysis
3.1. Feature Extraction
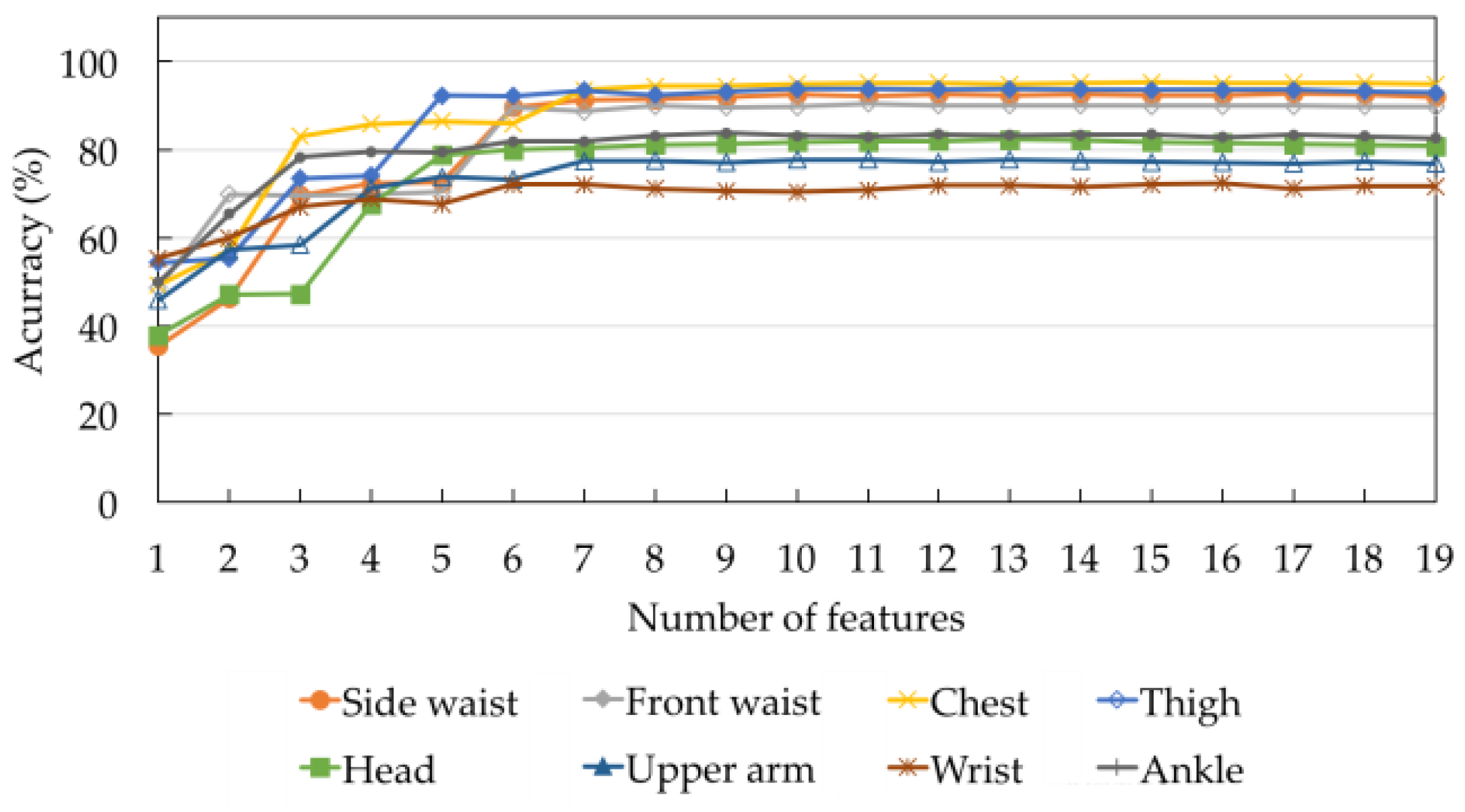
3.2. Feature Selection
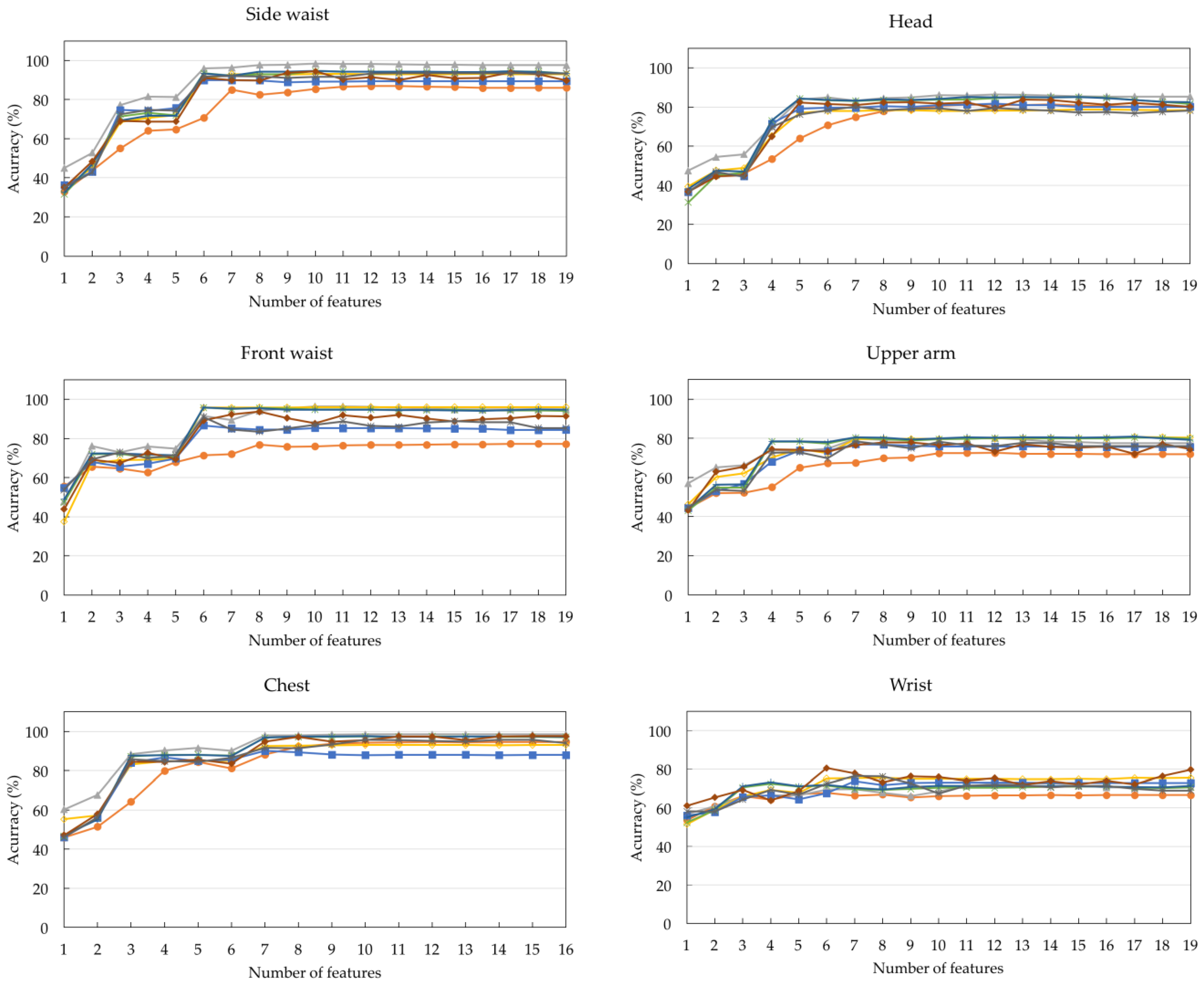
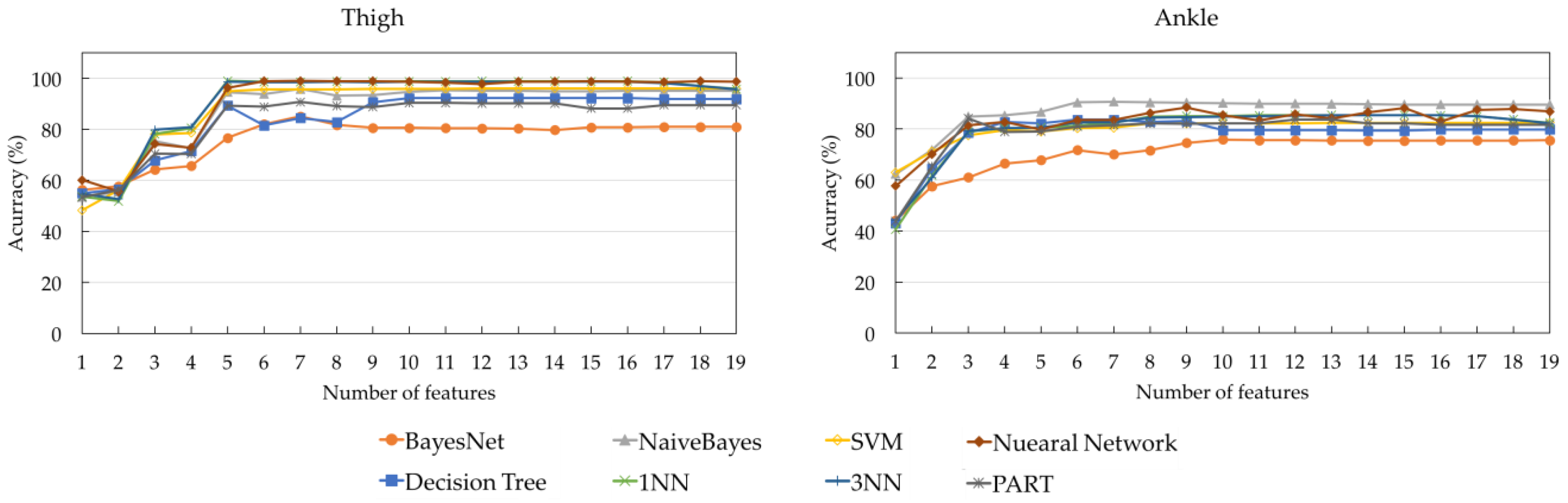
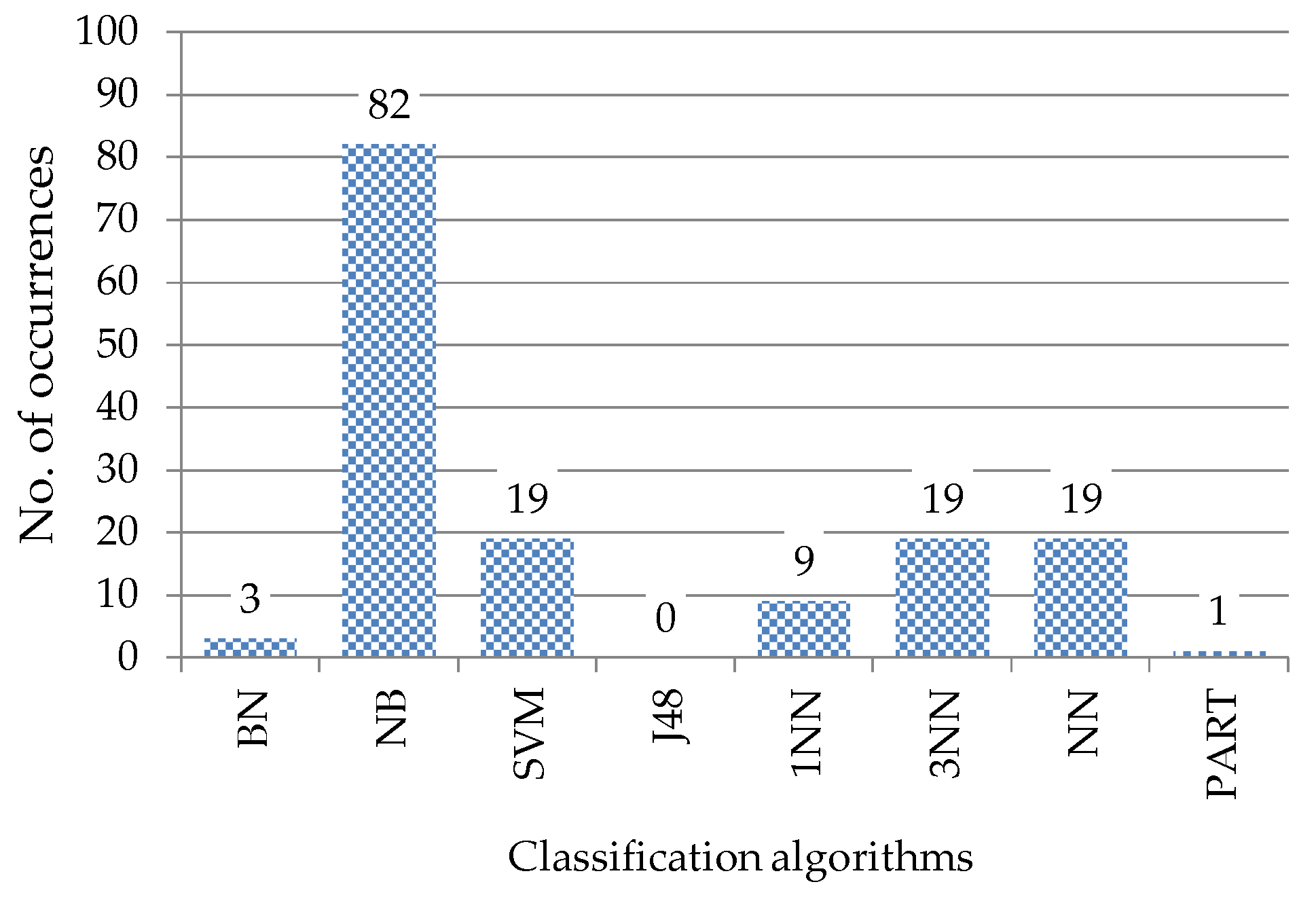
3.3. Classification Algorithms
- Bayesian network (BN) [52]: BN is a directed acyclic graphical model describing relationships between features and classes. Each node in a graph corresponds to a feature, and a directed edge between two nodes represents a causal relationship between them. By observing feature values and the class of each element in the set of data samples, one can construct such a network and use it to compute the probability of each class given an unseen sample. The class with the highest probability will be assigned to the sample. In our experiment, conditional probability tables are estimated by using a simple estimator, and network structures are learned from the data distribution by using the K2 search algorithm along with Bayesian scores.
- Naïve Bayes (NB) [53]: NB is a simple Bayes’ theorem-based probabilistic classifier with independent assumptions among features.
- Pruned decision tree (J48) [54]: J48 is a Java implementation of the C4.5 decision tree algorithm. C4.5 determines ‘information gain’ of each feature by comparing entropies of the data before and after considering the feature. C4.5 tries to construct a decision tree in which each node tests a feature value. Although the algorithm is proved to be very useful, features with many possible values could lead to overfitting. This problem could often be resolved by pruning some branches of the tree.
- Partial-tree rule learning (PART) [55]: PART uses the C4.5 decision algorithm to create a set of classification rules. However, unlike the ordinary C4.5, PART does not expand (or grow) a tree from the root to leaf nodes. It uses only a partially created tree that contains nodes with the lowest entropy to generate a set of rules. The instances covered by the created rules are then removed from the dataset. The process is repeated until all instances are covered.
- Instance-based learning [56]: Instead of building a classification model, an instance-based learning algorithm uses a set of given data as part of the classifier. The idea is built around an algorithm called k nearest neighbor (kNN). kNN treats each sample as a point in an M-dimensional space, where each dimension corresponds to one feature. It is assumed that elements of the same class should be close to each other (since they have similar properties, i.e. similar feature values). To classify an unseen sample, kNN finds k nearest data samples (or ‘neighbors’) and assigns the majority class of those samples to it.
- Multi-layered perceptron [57]: Sometimes referred to as neural network (NN), the algorithm classifies data samples using a layered structure (network) of small processing units, i.e., perceptrons. A perceptron takes in multiple inputs and produces a single output using a simple calculation function. Each input is associated with a computational weight. To classify a data sample, perceptrons in the first layer consider feature values of the samples and forward the output results to those in the next layer. Each perceptron in a subsequent layer produces an output by considering the results obtained from all perceptrons in its previous layer along with their corresponding weights. The process is repeated until the last layer is reached. A class is assigned to an unseen data sample based on the results of the last layer. The network can be trained to adapt itself to solve specific problems by continually adjusting the weight of each input to each perceptron.
- Support vector machine (SVM) [58]: SVM is a supervised machine learning algorithm, which can be used for both classification or regression analysis. Its basic principle is to define decision boundaries between a set of objects having different class memberships by constructing hyper planes in a multidimensional space. In our experiment, SVM is trained by applying a sequential minimal optimization algorithm with a polynomial kernel being used as a support vector.
4. Results
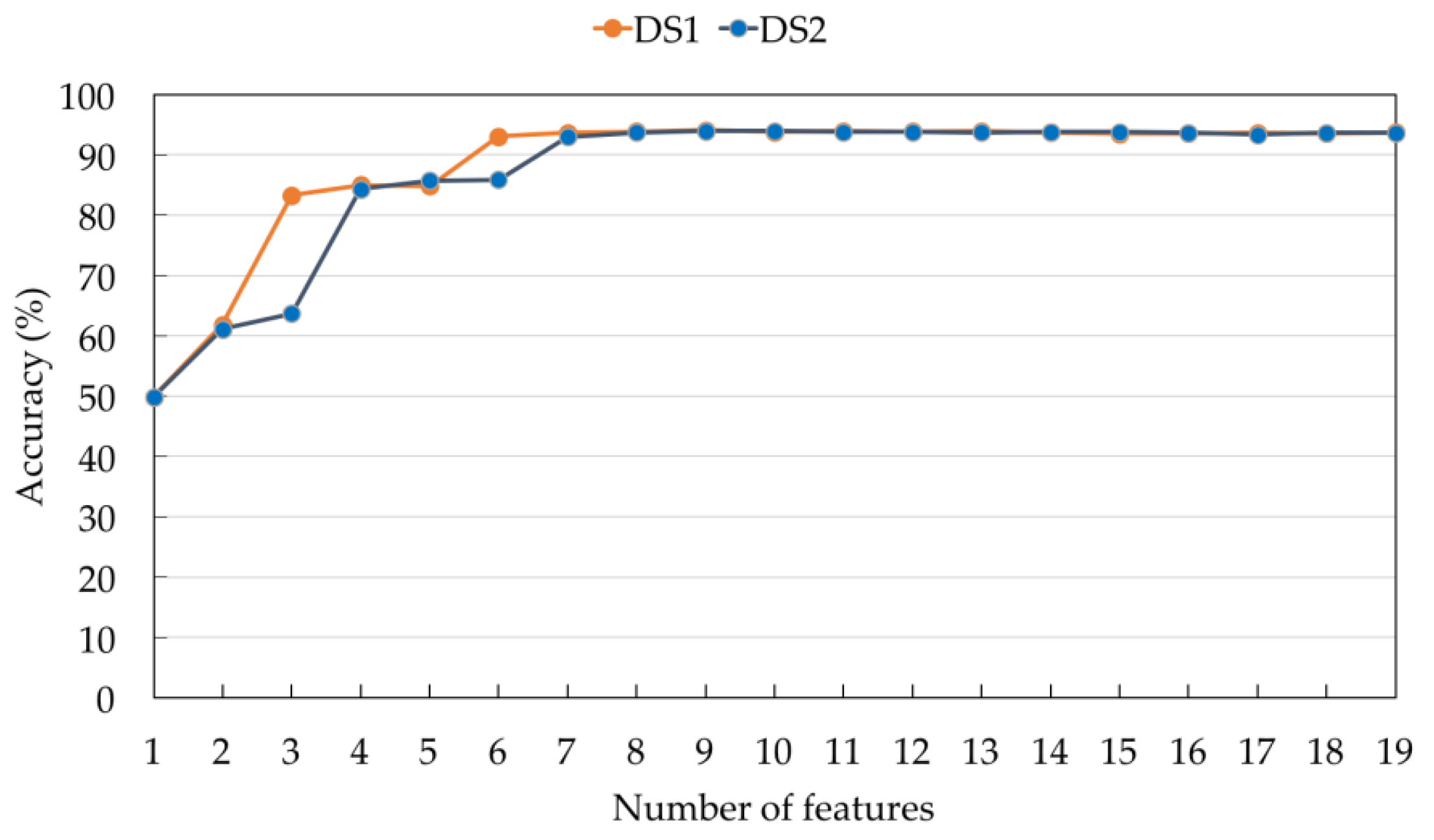
4.1. Validation Using DS1 (Young Subjects)
4.2. Validation Using DS2 (Elderly Subjects)
4.3. Comparison with a Transfer Learning Method
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| BSN | Body sensor network |
| ADL | Activity of daily living |
| BN | Bayesian network |
| NB | Naïve Bayes |
| PART | Partial-tree rule learning |
| kNN | k nearest neighbors |
| NN | Neural network |
| SVM | Support vector machine |
References
- Yang, G.-Z. Body Sensor Networks; Springer: London, UK, 2006. [Google Scholar]
- Bouten, C.; Sauren, A.; Verduin, M.; Janssen, J. Effects of placement and orientation of body-fixed accelerometers on the assessment of energy expenditure during walking. Med. Biol. Eng. Comput. 1997, 35, 50–56. [Google Scholar] [CrossRef] [PubMed]
- Swartz, A.; Strath, S.; Bassett, D.J.; O’Brien, W.; King, G.; Ainsworth, B. Estimation of energy expenditure using csa accelerometers at hip and wrist sites. Med. Sci. Sports Exerc. 2000, 32, S450–S456. [Google Scholar] [CrossRef] [PubMed]
- Crouter, S.E.; Clowers, K.G.; Bassett, D.R. A novel method for using accelerometer data to predict energy expenditure. J. Appl. Physiol. 2006, 100, 1324–1331. [Google Scholar] [CrossRef] [PubMed]
- Mayagoitia, R.E.; Lötters, J.C.; Veltink, P.H.; Hermens, H. Standing balance evaluation using a triaxial accelerometer. Gait Posture 2002, 16, 55–59. [Google Scholar] [CrossRef]
- Moe-Nilssen, R.; Helbostad, J.L. Trunk accelerometry as a measure of balance control during quiet standing. Gait Posture 2002, 16, 60–68. [Google Scholar] [CrossRef]
- Pannurat, N.; Theekakul, P.; Thiemjarus, S.; Nantajeewarawat, E. Toward real-time accurate fall/fall recovery detection system by incorporating activity information. In Proceedings of the IEEE-EMBS International Conference on Biomedical and Health Informatics, Hong Kong, Shenzhen, China, 5–7 January 2012; pp. 196–199. [Google Scholar]
- King, R.C.; Atallah, L.; Wong, C.; Miskelly, F.; Yang, G.Z. Elderly risk assessment of falls with bsn. In Proceedings of the International Conference on Body Sensor Networks, Singapore, 7–9 June 2010; pp. 30–35. [Google Scholar]
- Ravi, N.; Dandekar, N.; Mysore, P.; Littman, M.L. Activity recognition from accelerometer data. In Innovative Applications of Artificial Intelligence; AAAI Press: Pittsburgh, PA, USA, 2005; Volume 3, pp. 1541–1546. [Google Scholar]
- Bao, L.; Intille, S.S. Activity recognition from user-annotated acceleration data. In Proceedings of the Second International Conference on Pervasive Computing, Vienna, Austria, 21–23 April 2004; pp. 1–17. [Google Scholar]
- Fortino, G.; Gravina, R. Rehab-aaservice: A cloud-based motor rehabilitation digital assistant. In Proceedings of the Eighth International Conference on Pervasive Computing Technologies for Healthcare, Oldenburg, Germany, 20–23 May 2014; pp. 305–308. [Google Scholar]
- Covello, R.; Fortino, G.; Gravina, R.; Aguilar, A.; Breslin, J.G. Novel method and real-time system for detecting the cardiac defense response based on the ecg. In Proceedings of the IEEE International Symposium on Medical Measurements and Applications, Gatineau, QC, Canada, 4–5 May 2013; pp. 53–57. [Google Scholar]
- Nuksawn, L.; Nantajeewarawat, E.; Thiemjarus, S. Real-time sensor- and camera-based logging of sleep postures. In Proceedings of the International Computer Science and Engineering Conference, Chiang Mai, Thailand, 23–26 November 2015; pp. 1–6. [Google Scholar]
- Shoaib, M.; Bosch, S.; Incel, O.D.; Scholten, H.; Havinga, P.J.M. Fusion of smartphone motion sensors for physical activity recognition. Sensors 2014, 14, 10146–10176. [Google Scholar] [CrossRef] [PubMed]
- Shoaib, M.; Bosch, S.; Incel, O.D.; Scholten, H.; Havinga, P.J.M. Complex human activity recognition using smartphone and wrist-worn motion sensors. Sensors 2016, 16, 426. [Google Scholar] [CrossRef] [PubMed]
- Godfrey, A.; Bourke, A.K.; Ólaighin, G.M.; van de Ven, P.; Nelson, J. Activity classification using a single chest mounted tri-axial accelerometer. Med. Eng. Phys. 2011, 33, 1127–1135. [Google Scholar] [CrossRef] [PubMed]
- Casson, A.J.; Vazquez Galvez, A.; Jarchi, D. Gyroscope vs. Accelerometer measurements of motion from wrist ppg during physical exercise. ICT Express 2016, 2, 175–179. [Google Scholar] [CrossRef]
- Fortino, G.; Giannantonio, R.; Gravina, R.; Kuryloski, P.; Jafari, R. Enabling effective programming and flexible management of efficient body sensor network applications. IEEE Trans. Hum. Mach. Syst. 2013, 43, 115–133. [Google Scholar] [CrossRef]
- Gjoreski, H.; Lustrek, M.; Gams, M. Accelerometer placement for posture recognition and fall detection. In Proceedings of the Seventh International Conference on Intelligent Environments, Nottingham, UK, 25–28 July 2011; pp. 47–54. [Google Scholar]
- Cleland, I.; Kikhia, B.; Nugent, C.; Boytsov, A.; Hallberg, J.; Synnes, K.; McClean, S.; Finlay, D. Optimal placement of accelerometers for the detection of everyday activities. Sensors 2013, 13, 9183–9200. [Google Scholar] [CrossRef] [PubMed]
- Atallah, L.; Lo, B.; King, R.; Yang, G. Sensor positioning for activity recognition using wearable accelerometers. IEEE Trans. Biomed. Circuits Syst. 2011, 5, 320–329. [Google Scholar] [CrossRef] [PubMed]
- Gravina, R.; Alinia, P.; Ghasemzadeh, H.; Fortino, G. Multi-sensor fusion in body sensor networks: State-of-the-art and research challenges. Inf. Fusion 2017, 35, 68–80. [Google Scholar] [CrossRef]
- Ghasemzadeh, H.; Panuccio, P.; Trovato, S.; Fortino, G.; Jafari, R. Power-aware activity monitoring using distributed wearable sensors. IEEE Trans. Hum. Mach. Syst. 2014, 44, 537–544. [Google Scholar] [CrossRef]
- Thiemjarus, S.; Pansiot, J.; Mcllwraith, D.G.; Lo, B.P.L.; Yang, G.-Z. An integrated inferencing framework for context sensing. In Proceedings of the Fifth International Conference on Information Technology and Applications in Biomedicine, Shenzhen, China, 30–31 May 2008; pp. 270–274. [Google Scholar]
- Thiemjarus, S.; James, A.; Yang, G.-Z. An eye hand data fusion framework for pervasive sensing of surgical activities. Pattern Recognit. 2012, 45, 2855–2867. [Google Scholar] [CrossRef]
- Yeoh, W.S.; Pek, I.; Yong, Y.H.; Chen, X.; Waluyo, A.B. Ambulatory monitoring of human posture and walking speed using wearable accelerometer sensors. In Proceedings of the Thirtieth Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Vancouver, BC, Canada, 20–25 August 2008; pp. 5184–5187. [Google Scholar]
- Mathie, M.J.; Coster, A.C.F.; Lovell, N.H.; Celler, B.G. Detection of daily physical activities using a triaxial accelerometer. Med. Biol. Eng. Comput. 2003, 41, 296–301. [Google Scholar] [CrossRef] [PubMed]
- Baek, J.; Lee, G.; Park, W.; Yun, B.-J. Accelerometer signal processing for user activity detection. In Knowledge-Based Intelligent Information and Engineering Systems; Negoita, M., Howlett, R., Jain, L., Eds.; Springer: Berlin/Heidelberg, Germany, 2004; Volume 3215, pp. 610–617. [Google Scholar]
- Meijer, G.A.L.; Westerterp, K.R.; Verhoeven, F.M.H.; Koper, H.B.M.; Hoor, F.T. Methods to assess physical activity with special reference to motion sensors and accelerometers. IEEE Trans. Biomed. Eng. 1991, 38, 221–229. [Google Scholar] [CrossRef] [PubMed]
- Maurer, U.; Smailagic, A.; Siewiorek, D.P.; Deisher, M. Activity recognition and monitoring using multiple sensors on different body positions. In Proceedings of the International Workshop on Wearable and Implantable Body Sensor Networks, Cambridge, MA, USA, 3–5 April 2006; pp. 113–116. [Google Scholar]
- Tamura, T.; Fujimoto, T.; Muramoto, H.; Huang, J.; Sakaki, H.; Togawa, T. The design of an ambulatory physical activity monitor and it application to the daily activity of the elderly. In Proceedings of the Seventeenth IEEE Annual Conference on Engineering in Medicine and Biology Society, Montreal, QC, Canada, 20–23 September 1995; pp. 1591–1592. [Google Scholar]
- Mehmood, A.; Raza, A.; Nadeem, A.; Saeed, U. Study of multi-classification of advanced daily life activities on shimmer sensor dataset. Int. J. Commun. Networks Inf. Secur. 2016, 8, 86–92. [Google Scholar]
- Gupta, P.; Dallas, T. Feature selection and activity recognition system using a single triaxial accelerometer. IEEE Trans. Biomed. Eng. 2014, 61, 1780–1786. [Google Scholar] [CrossRef] [PubMed]
- Leutheuser, H.; Schuldhaus, D.; Eskofier, B.M. Hierarchical, multi-sensor based classification of daily life activities: Comparison with state-of-the-art algorithms using a benchmark dataset. PLoS ONE 2013, 8, e75196. [Google Scholar]
- Lyons, G.M.; Culhane, K.M.; Hiltob, D.; Grace, P.A.; Lyons, D. A description of an accelerometer-based mobility monitoring technique. Med. Eng. Phys. 2005, 27, 497–504. [Google Scholar] [CrossRef] [PubMed]
- Lara, Ó.D.; Pérez, A.J.; Labrador, M.A.; Posada, J.D. Centinela: A human activity recognition system based on acceleration and vital sign data. Pervasive Mob. Comput. 2012, 8, 717–729. [Google Scholar] [CrossRef]
- McGlynn, D.; Madden, M.G. An ensemble dynamic time warping classifier with application to activity recognition. In Research and Development in Intelligent Systems XXVII; Bramer, M., Petridis, M., Hopgood, A., Eds.; Springer: London, UK, 2011; pp. 339–352. [Google Scholar]
- Khan, A.M.; Lee, Y.K.; Lee, S.Y.; Kim, T.S. A triaxial accelerometer-based physical-activity recognition via augmented-signal features and a hierarchical recognizer. IEEE Trans. Inf. Technol. Biomed. 2010, 14, 1166–1172. [Google Scholar] [CrossRef] [PubMed]
- Ermes, M.; Parkka, J.; Cluitmans, L. Advancing from offline to online activity recognition with wearable sensors. In Proceedings of the Thirtieth Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Vancouver, BC, Canada, 20–25 August 2008; pp. 4451–4454. [Google Scholar]
- Parkka, J.; Ermes, M.; Korpipaa, P.; Mantyjarvi, J.; Peltola, J.; Korhonen, I. Activity classification using realistic data from wearable sensors. IEEE Trans. Inf. Technol. Biomed. 2006, 10, 119–128. [Google Scholar] [CrossRef] [PubMed]
- Ahmadi, A.; Mitchell, E.; Richter, C.; Destelle, F.; Gowing, M.; Moran, K. Toward automatic activity classification and movement assessment during a sports training session. IEEE Inter. Things J. 2015, 2, 23–32. [Google Scholar] [CrossRef]
- Min, J.K.; Cho, S.B. Activity recognition based on wearable sensors using selection/fusion hybrid ensemble. In Proceedings of the IEEE International Conference on Systems, Man and Cybernetics, Anchorage, AK, USA, 9–12 October 2011; pp. 1319–1324. [Google Scholar]
- Menz, H.B.; Lord, S.R.; Fitzpatrick, C. Age-related differences in walking stability. Age Ageing 2003, 32, 137–142. [Google Scholar] [CrossRef] [PubMed]
- Gaglione, A.; Chen, S.; Lo, B.; Yang, G.Z. A low-power opportunistic communication protocol for wearable applications. In Proceedings of the Twelfth International Conference on Wearable and Implantable Body Sensor Networks, Cambridge, MA, USA, 9–12 June 2015; pp. 1–6. [Google Scholar]
- Bsn Development kit v.3. Available online: http://vip.doc.ic.ac.uk/bsn/a1892.html (accessed on 10 March 2017).
- Yang, G.-Z. Body Sensor Networks, 2nd ed.; Springer: London, UK, 2014. [Google Scholar]
- Kononenko, I. Estimating attributes: Analysis and extensions of relief. In Proceedings of the European Conference on Machine Learning on Machine Learning, Catania, Italy, 6–8 April 1994; pp. 171–182. [Google Scholar]
- Kira, K.; Rendell, L.A. A practical approach to feature selection. In Proceedings of the Ninth International Workshop on Machine Learning; Morgan Kaufmann Publishers Inc.: Burlington, MA, USA, 1992; pp. 249–256. [Google Scholar]
- Howcroft, J. Evaluation of Wearable Sensors as an Older Adult Fall Risk Assessment Tool; UWSpace: Waterloo, ON, Canada, 2016. [Google Scholar]
- Zhang, M.; Sawchuk, A.A. A feature selection-based framework for human activity recognition using wearable multimodal sensors. In Proceedings of the Sixth International Conference on Body Area Networks; ICST: Beijing, China, 2011; pp. 92–98. [Google Scholar]
- Liu, H.; Motoda, H. Computational Methods of Feature Selection; CRC Press: Boca Raton, FL, USA, 2007. [Google Scholar]
- Cooper, G.F.; Herskovits, E. A bayesian method for the induction of probabilistic networks from data. Mach. Learn. 1992, 9, 309–347. [Google Scholar] [CrossRef]
- George, H.J.; Langley, P. Estimating continuous distributions in bayesian classifiers. In Proceedings of the Eleventh Conference on Uncertainty in Artificial Intelligence, Montreal, QC, Canada, 18–20 August 1995; pp. 338–345. [Google Scholar]
- Quinlan, R. C4.5: Programs for Machine Learning; Morgan Kaufmann Publishers: San Mateo, CA, USA, 1993. [Google Scholar]
- Frank, E.; Witten, I.H. Generating accurate rule sets without global optimization. In Proceedings of the Fifteenth International Conference on Machine Learning; Morgan Kaufmann Publishers Inc.: Burlington, MA, USA, 1998; pp. 144–151. [Google Scholar]
- Aha, D.; Kibler, D. Instance-based learning algorithms. Mach. Learn. 1991, 6, 37–66. [Google Scholar] [CrossRef]
- Haykin, S. Neural Networks: A Comprehensive Foundation; Prentice Hall PTR: Upper Saddle River, NJ, USA, 1998. [Google Scholar]
- Platt, J. Fast training of support vector machines using sequential minimal optimization. In Advances in Kernel Methods—Support Vector Learning; Schoelkopf, B., Burges, C., Smola, A., Eds.; MIT Press: Cambridge, MA, USA, 1999. [Google Scholar]
- Kangas, M.; Konttila, A.; Winblad, I.; Jamsa, T. Determination of simple thresholds for accelerometry-based parameters for fall detection. In Proceedings of the Twenty-Ninth Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Lyon, France, 22–26 August 2007; pp. 1367–1370. [Google Scholar]
- Kumahara, H.; Tanaka, H.; Schutz, Y. Daily physical activity assessment: What is the importance of upper limb movements vs. whole body movements? Int. J. Obes. 2004, 28, 1105–1110. [Google Scholar] [CrossRef] [PubMed]
- Bianchi, F.; Redmond, S.J.; Narayanan, M.R.; Cerutti, S.; Lovell, N.H. Barometric pressure and triaxial accelerometry-based falls event detection. IEEE T. Neur. Sys. Reh. Eng. 2010, 18, 619–627. [Google Scholar] [CrossRef] [PubMed]
- Byrnes, J.P. Cognitive Development and Learning in Instructional Contexts; Allyn and Bacon: Boston, MA, USA, 1996. [Google Scholar]
- Cook, D.; Feuz, K.D.; Krishnan, N.C. Transfer learning for activity recognition: A survey. Knowl. Inf. Syst. 2013, 36, 537–556. [Google Scholar] [CrossRef] [PubMed]
- Saeedi, R.; Ghasemzadeh, H.; Gebremedhin, A.H. Transfer learning algorithms for autonomous reconfiguration of wearable systems. In Proceedings of the IEEE International Conference on Big Data, Washington, DC, USA, 5–8 December 2016; pp. 563–569. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature | Description | Equation |
|---|---|---|
| F1–F3 | Means along x-, y-, and z-axes | |
| F4–F6 | Standard deviations along x-, y-, and z-axes | |
| F7–F9 | Maximum values along x-, y-, and z-axes | |
| F10–F12 | Minimum value along x-, y-, and z-axes | |
| F13–F15 | Differences between maximum and minimum values along x-, y-, and z-axes | |
| F16 | Standard deviation magnitude | |
| F17–F19 | Correlation between x-y, x-z, and y-z axes |
| Position | Feature Ranks | ||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | |
| Side waist | F3 | F9 | F7 | F10 | F1 | F11 | F2 | F8 | F12 | F16 | F4 | F5 | F14 | F15 | F6 | F13 | F18 | F19 | F17 |
| Front waist | F3 | F7 | F1 | F9 | F12 | F11 | F10 | F2 | F8 | F16 | F6 | F15 | F4 | F14 | F13 | F5 | F19 | F17 | F18 |
| Chest | F3 | F9 | F8 | F11 | F2 | F12 | F7 | F1 | F10 | F14 | F5 | F15 | F6 | F16 | F13 | F4 | F18 | F17 | F19 |
| Thigh | F9 | F3 | F1 | F7 | F2 | F8 | F11 | F10 | F12 | F16 | F4 | F13 | F5 | F6 | F15 | F14 | F17 | F19 | F18 |
| Head | F3 | F9 | F12 | F2 | F7 | F8 | F11 | F1 | F10 | F6 | F15 | F16 | F4 | F13 | F14 | F5 | F17 | F18 | F19 |
| Upper arm | F3 | F9 | F12 | F2 | F11 | F8 | F1 | F7 | F10 | F16 | F6 | F13 | F15 | F4 | F14 | F5 | F17 | F18 | F19 |
| Wrist | F3 | F9 | F7 | F12 | F1 | F2 | F11 | F10 | F8 | F16 | F6 | F15 | F4 | F13 | F5 | F14 | F17 | F18 | F19 |
| Ankle | F9 | F3 | F1 | F12 | F7 | F2 | F10 | F11 | F8 | F16 | F6 | F15 | F4 | F5 | F13 | F14 | F18 | F19 | F17 |
| Position | Number of Features | Best Algorithm | Accuracy |
|---|---|---|---|
| Side waist | 10 | NB | 98.34 |
| Front waist | 11 | NB | 96.45 |
| Chest | 10 | NB | 98.50 |
| Thigh | 5 | 1NN | 99.00 |
| Head | 12 | NB | 86.38 |
| Upper arm | 17 | 3NN | 80.83 |
| Wrist | 6 | NN | 80.60 |
| Ankle | 7 | NB | 90.70 |
| Position | Feature Ranks | ||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | |
| Side waist | NB | NB | NB | NB | NB | NB | NB | NB | NB | NB | NB | NB | NB | NB | NB | NB | NB | NB | NB |
| Front waist | BN | NB | NB | NB | NN | 3NN | SVM | SVM | SVM | NB | NB | NB | SVM | SVM | SVM | SVM | SVM | SVM | SVM |
| Chest | NB | NB | NB | NB | NB | NB | NB | NB | NB | NB | NB | NB | NB | NB | NB | NB | NB | NB | NB |
| Thigh | BN | BN | 3NN | 3NN | NN | NN | 1NN | NN | NN | 1NN | 1NN | 1NN | 1NN | 1NN | 1NN | 1NN | NN | NN | NN |
| Head | NB | NB | NB | 3NN | 1NN | NB | NB | NB | NN | NB | NB | NB | NB | NB | NB | NB | NB | NB | NB |
| Upper arm | NB | NB | NB | 3NN | NN | 3NN | 3NN | 3NN | SVM | 3NN | 3NN | 3NN | 3NN | 3NN | 3NN | 3NN | 3NN | SVM | SVM |
| Wrist | NN | NN | 3NN | 3NN | 3NN | NN | NN | PART | NN | NN | SVM | NN | SVM | SVM | SVM | SVM | SVM | NN | NN |
| Ankle | NB | NB | NB | NB | NB | NB | NB | NB | NB | NB | NB | NB | NB | NB | NB | NB | NB | NB | NB |
| Position | Activities | Average | ||||||
|---|---|---|---|---|---|---|---|---|
| Sitting | Supine | Lying Left | Prone | Lying Right | Standing | Walking | ||
| Side waist | 94.05 | 99.79 | 100.00 | 97.50 | 99.79 | 97.27 | 100.00 | 98.34 |
| Front waist | 93.63 | 99.66 | 94.06 | 98.61 | 90.48 | 98.69 | 100.00 | 96.45 |
| Chest | 92.72 | 100.00 | 100.00 | 100.00 | 99.83 | 97.14 | 99.81 | 98.50 |
| Thigh | 93.97 | 99.28 | 100.00 | 100.00 | 100.00 | 100.00 | 99.78 | 99.00 |
| Head | 35.20 | 99.05 | 99.18 | 89.09 | 94.50 | 88.40 | 99.26 | 86.38 |
| Upper arm | 92.59 | 71.65 | 84.90 | 49.79 | 69.30 | 98.50 | 99.11 | 80.83 |
| Wrist | 77.25 | 78.24 | 72.59 | 58.42 | 80.45 | 98.45 | 98.77 | 80.60 |
| Ankle | 97.61 | 79.91 | 87.71 | 80.31 | 93.42 | 98.82 | 97.13 | 90.70 |
| Dataset | Feature Ranks | ||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | |
| DS1 | F3 | F9 | F7 | F10 | F1 | F11 | F2 | F8 | F12 | F16 | F4 | F5 | F14 | F15 | F6 | F13 | F18 | F19 | F17 |
| DS2 | F3 | F12 | F9 | F10 | F7 | F1 | F11 | F2 | F8 | F16 | F14 | F5 | F13 | F4 | F15 | F6 | F19 | F18 | F17 |
| Activities | Average | |||||
|---|---|---|---|---|---|---|
| Sitting | Standing | Walking | Supine | Ling Left | Lying Right | |
| 96.03 | 96.78 | 100.00 | 94.32 | 92.04 | 95.43 | 95.77 |
| Our Study | Saeedi et al.’s Study | |
|---|---|---|
| No. of subjects | 12 young subjects | 9 young subjects |
| 48 elderly subjects | ||
| Sensor | 3D accelerometers | 3D accelerometers |
| Sampling rate | 15 and 50 Hz | 50, 100, 150, and 200 Hz |
| Features | 19 features, with Relief-F feature selection algorithm | Signal similarity |
| Window size | 1 s (shifted by 0.5 s) | 2 s (shifted by 0.5 s) |
| Sensor placements | Side waist, front waist, chest, thigh, head, upper arm, wrist, and ankle | Waist |
| Activities | Sitting, supine, lying on the left side, prone, lying on the right side, standing, and walking | Walking, sitting, standing, walking downstairs, walking upstairs, and biking |
| Classifiers | BN, NB, J48, PART, kNN, NN, and SVM | kNN, decision tree, and random forest |
| Accuracy | 98.34% (side waist, using NB with 10 features) | ~85% (with random forest) |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pannurat, N.; Thiemjarus, S.; Nantajeewarawat, E.; Anantavrasilp, I. Analysis of Optimal Sensor Positions for Activity Classification and Application on a Different Data Collection Scenario. Sensors 2017, 17, 774. https://doi.org/10.3390/s17040774
Pannurat N, Thiemjarus S, Nantajeewarawat E, Anantavrasilp I. Analysis of Optimal Sensor Positions for Activity Classification and Application on a Different Data Collection Scenario. Sensors. 2017; 17(4):774. https://doi.org/10.3390/s17040774
Chicago/Turabian StylePannurat, Natthapon, Surapa Thiemjarus, Ekawit Nantajeewarawat, and Isara Anantavrasilp. 2017. "Analysis of Optimal Sensor Positions for Activity Classification and Application on a Different Data Collection Scenario" Sensors 17, no. 4: 774. https://doi.org/10.3390/s17040774
APA StylePannurat, N., Thiemjarus, S., Nantajeewarawat, E., & Anantavrasilp, I. (2017). Analysis of Optimal Sensor Positions for Activity Classification and Application on a Different Data Collection Scenario. Sensors, 17(4), 774. https://doi.org/10.3390/s17040774