A Novel Robust Trilateration Method Applied to Ultra-Wide Bandwidth Location Systems


Abstract
:1. Introduction
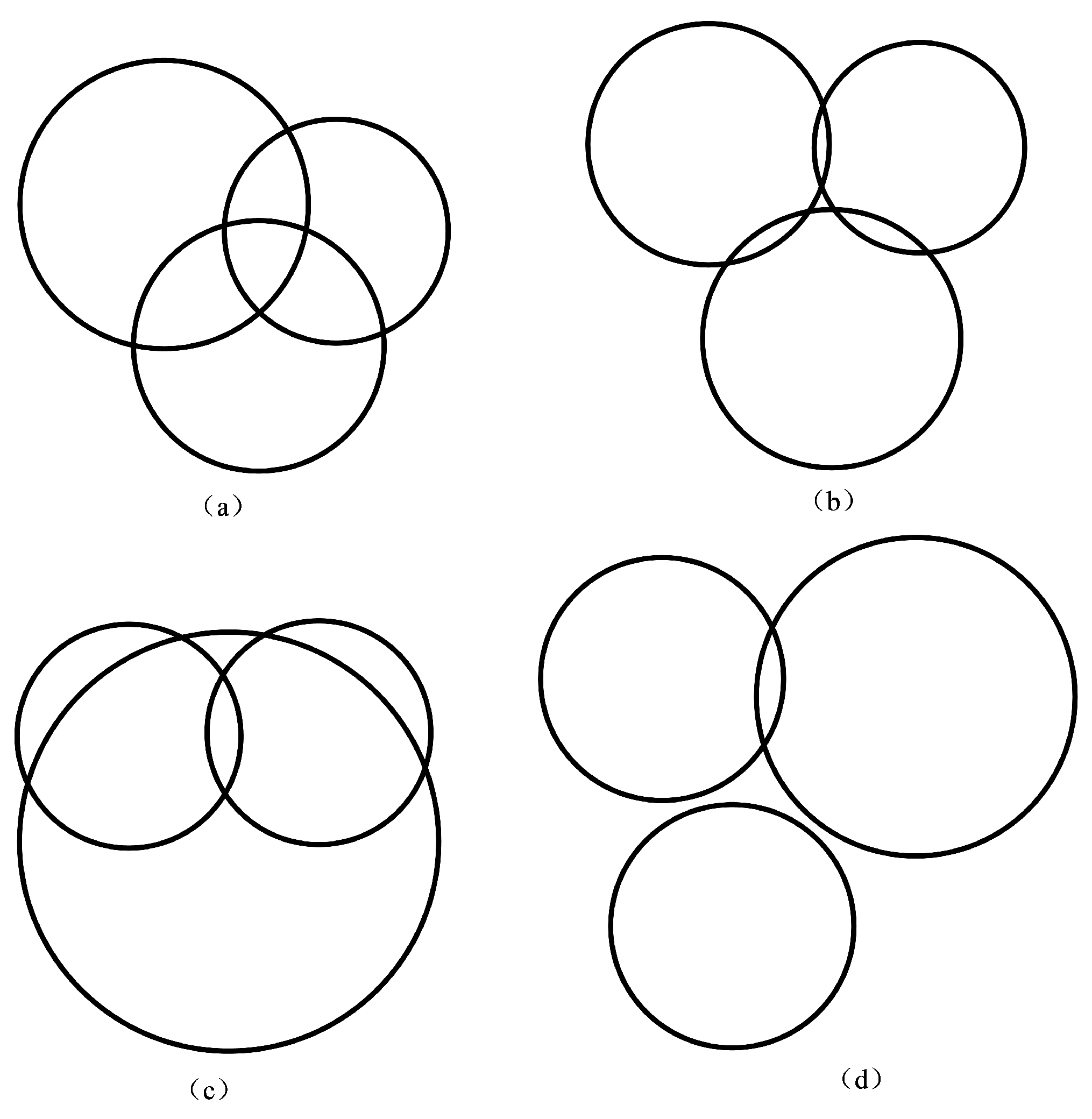
- Uncertainty: Due to the non-line-of-sight (NLOS) and multipath fading channel (MPF) problem, the uncertainty often occurs in the distance measurement procedure, which leads to the phenomenon that there are two intersection points of the anchor circles, and even no points.
- Heterogeneity: In most cases, the method requires three or more anchor nodes for broader coverage. Therefore, the inconsistency of the computation results may occur.
2. Problem Formulation
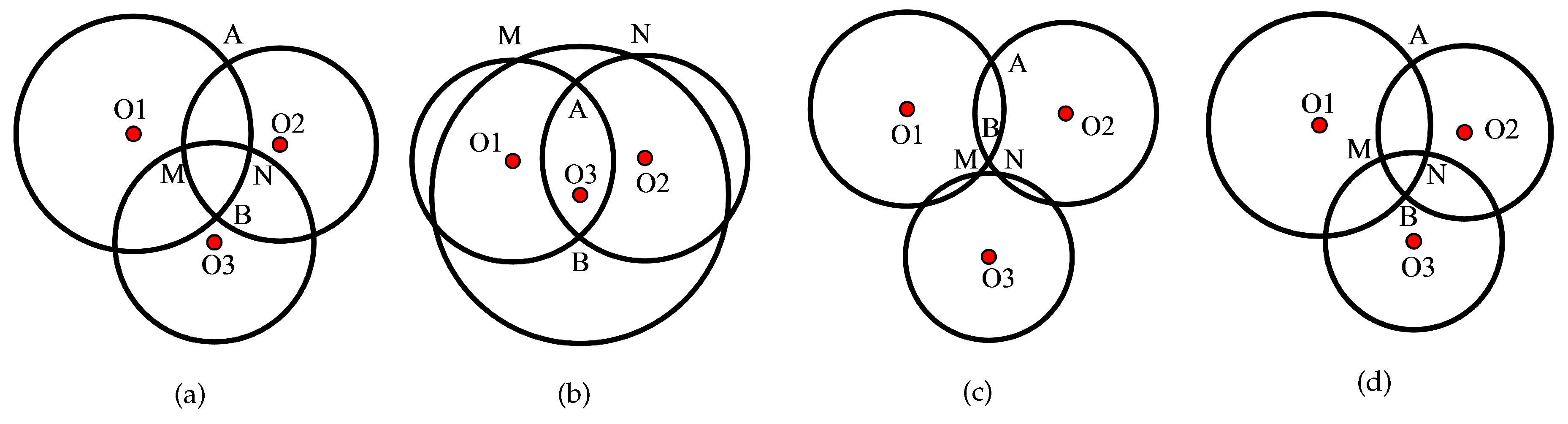
2.1. Intersection Determination
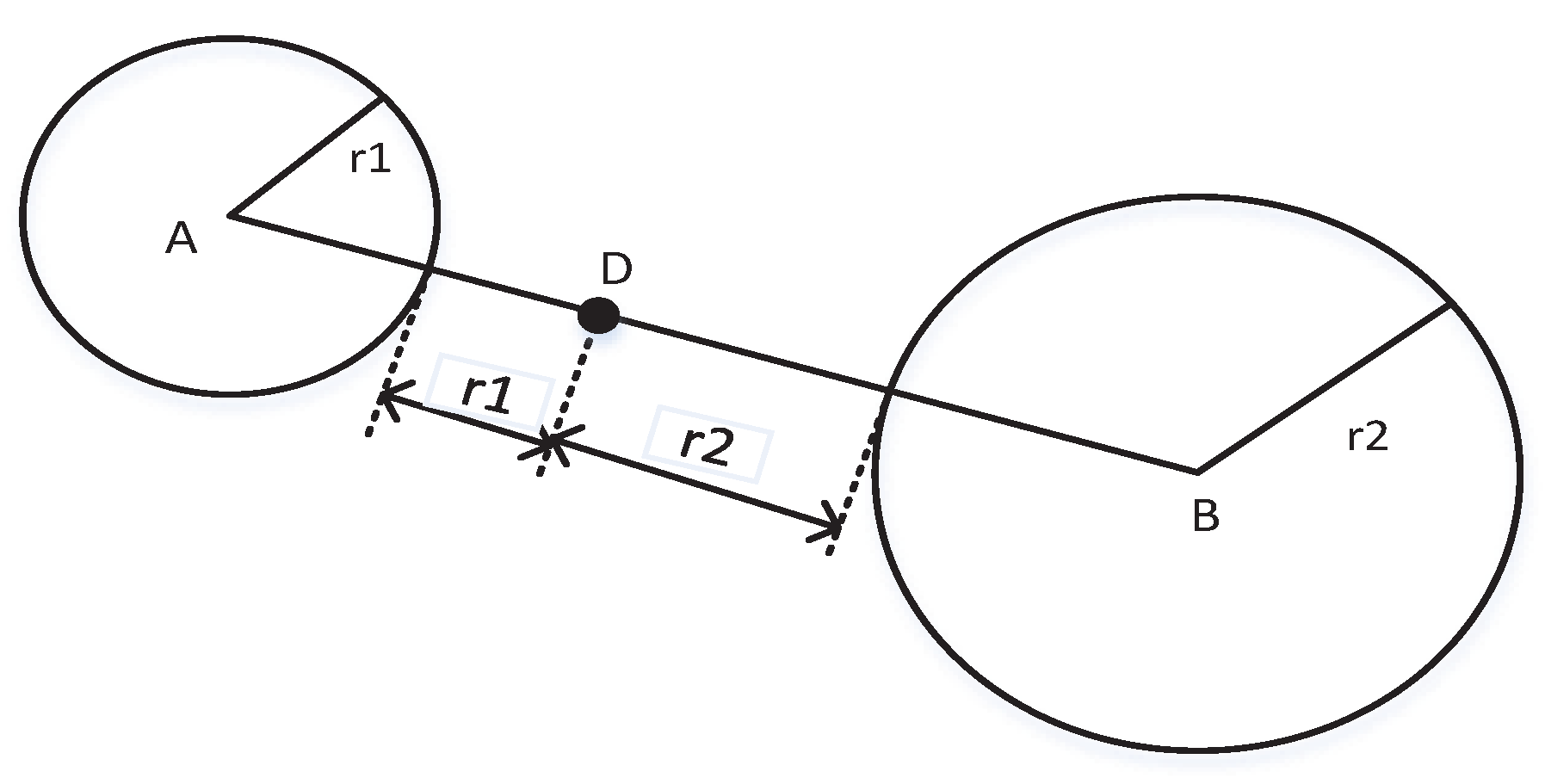
2.2. Distance Compensation
3. Improved Confidence-Based Trilateration Method
3.1. CRLB of TOF Estimation with NLOS Propagation in the MPF Channel
3.2. New Intersection Determination Principle
3.3. Confidence-Based Distance Compensation
3.4. Positioning Method
- For qth selection, select three anchor nodes from N nodes which positions are known, denoted as . Then, the positions satisfy the Equation (1).
- Simultaneous the two equations of the ith anchor and jth anchor. Applying the intersection judgement formula in (4), if the solutions to the equations exist, then go to step 4; otherwise, go to step 3.
- The range d is compensated by the new distance , where is calculated in the Equation (18). Go to step 2.
- Another two optimal intersection points and are determined following the steps 1–4. Based on the centroid-based trilateration method, the coordination of the target of qth combination can be computed as:
- By alternating the anchor nodes, then the coordination of the target can be computed following steps 1–5. Then, the estimate of the coordination of the target is computed as:
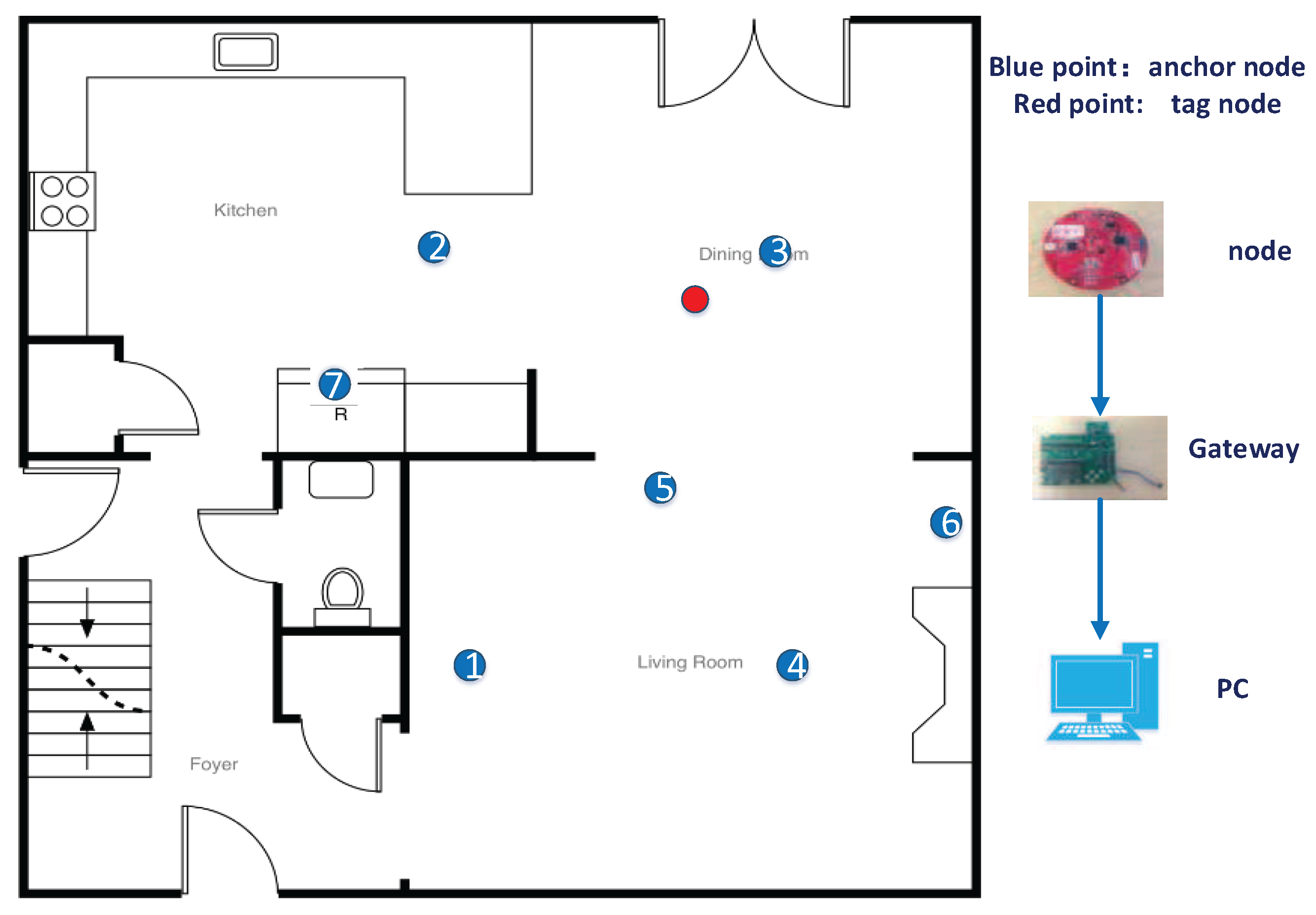
4. Results
4.1. Experiments
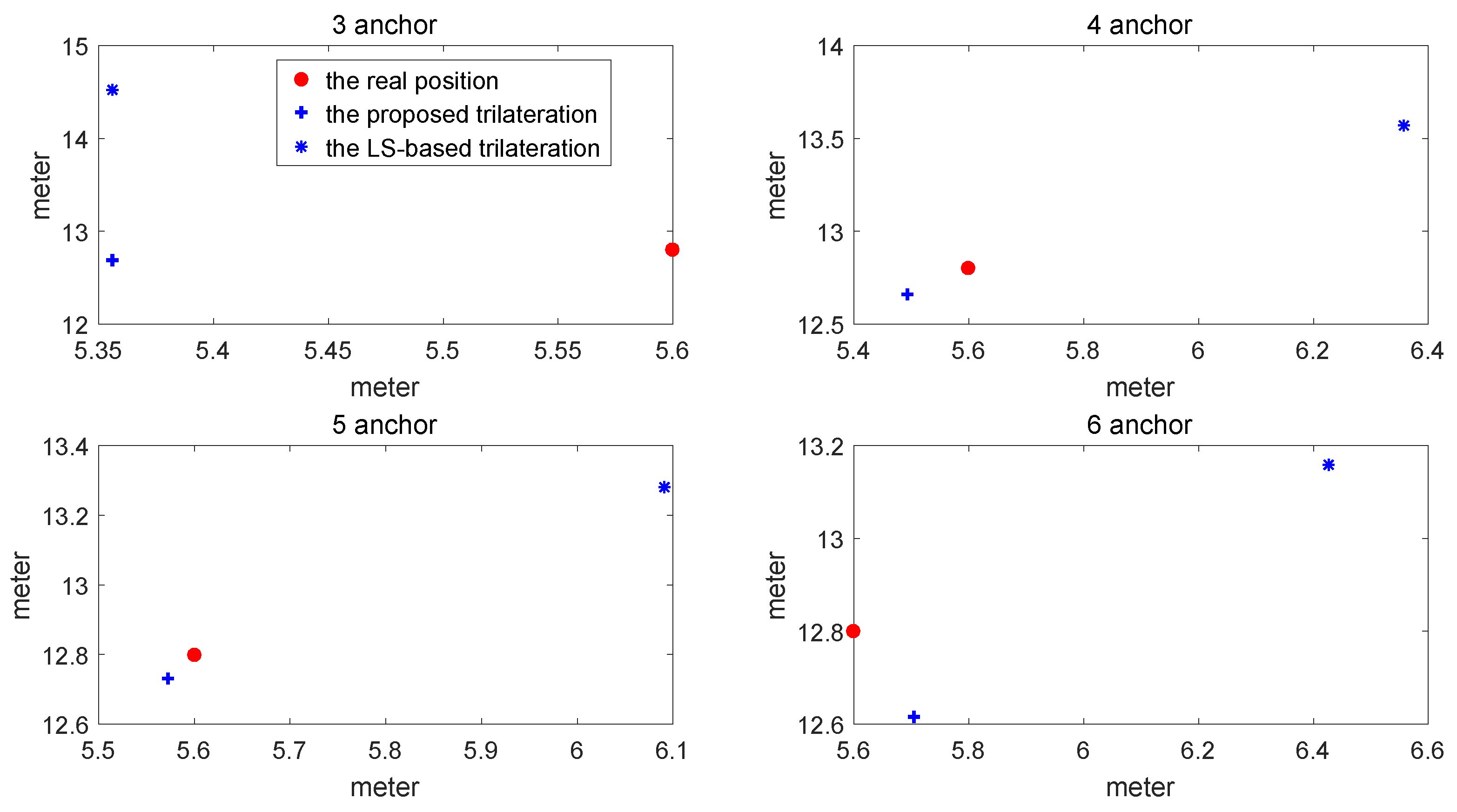
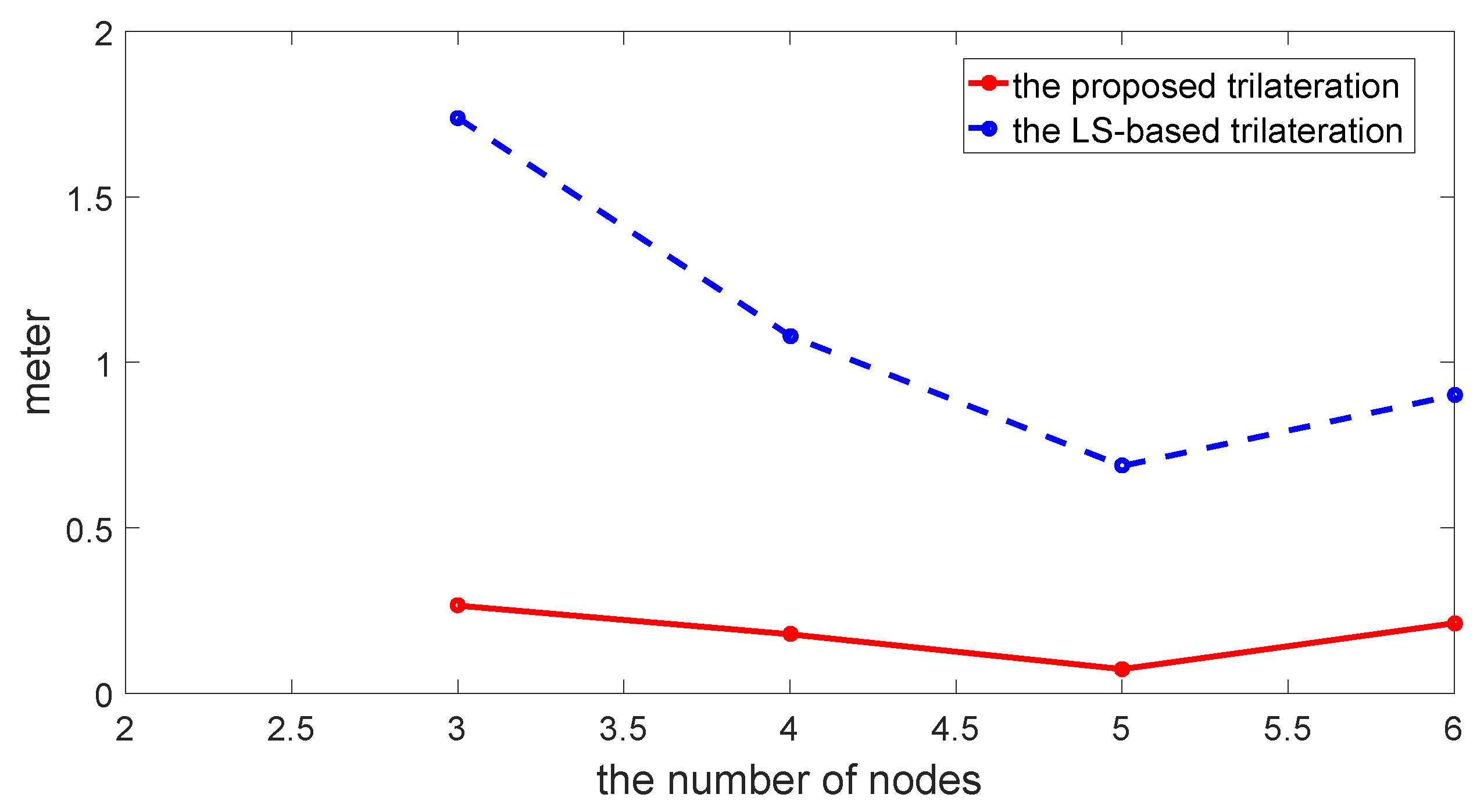
4.2. Accuracy Performance
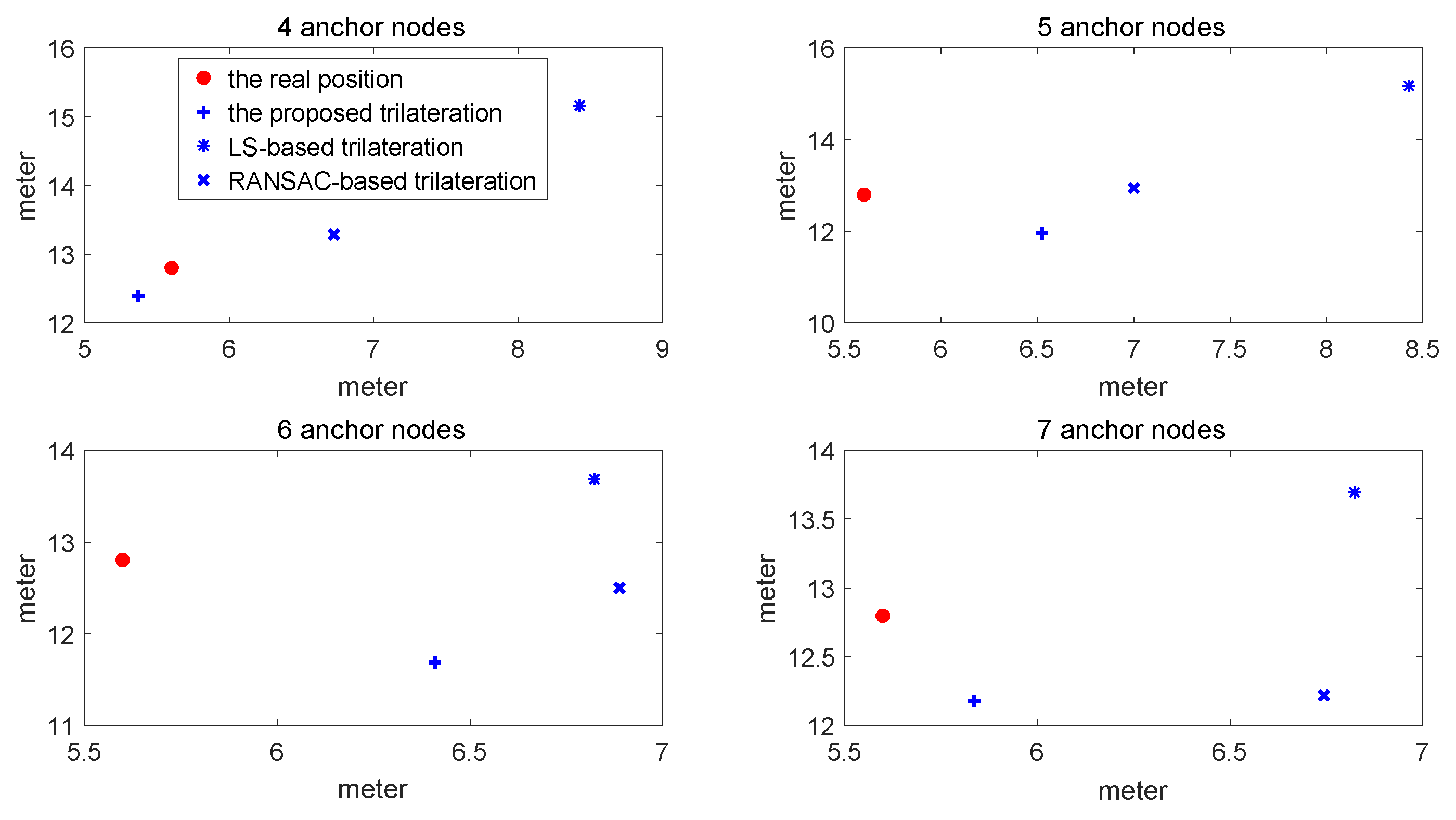
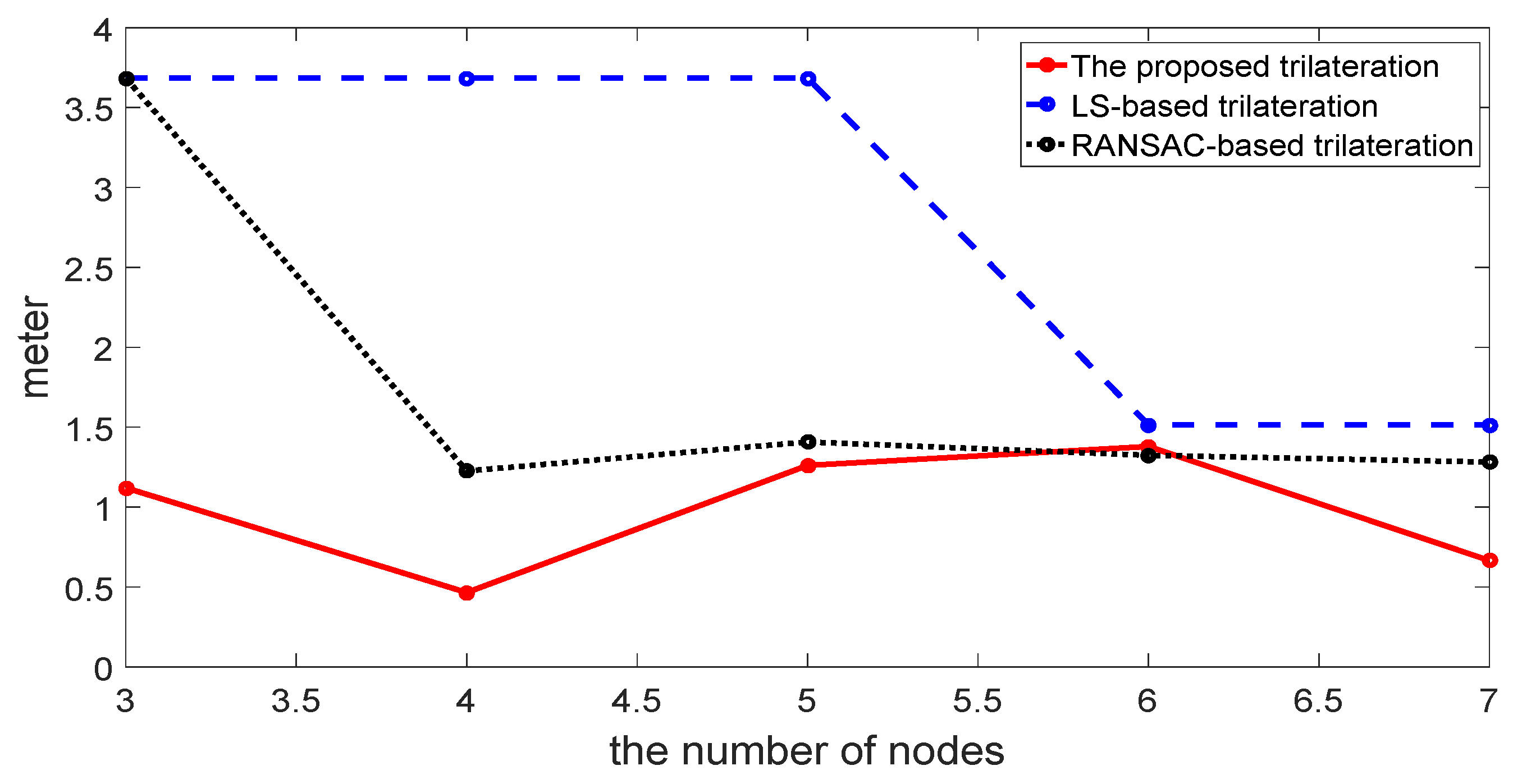
4.3. Robustness Performance
5. Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Akyildiz, I.F.; Su, W.; Sankarasubramaniam, Y.; Cayirci, E. A survey on sensor networks. IEEE Commun. Mag. 2002, 40, 102–114. [Google Scholar] [CrossRef]
- Savarese, C.; Rabaey, J.M.; Beutel, J. Locationing in distributed ad-hoc wireless sensor networks. In Proceedings of the IEEE International Conference on Acoustics, Speech, and Signal, Salt Lake, UT, USA, 7–11 May 2001; Volume 4, pp. 2037–2040. [Google Scholar]
- Peneda, L.; Azenha, A.; Carvalho, A. Trilateration for indoors positioning within the framework of wireless communications. In Proceedings of the IEEE 35th Annual Conference of Industrial Electronics (IECON ’09), Porto, Portugal, 3–5 November 2009; pp. 2732–2737. [Google Scholar]
- Kulaib, A.R.; Shubair, R.M.; Al-Qutayri, M.A.; Ng, J.W.P. An overview of localization techniques for Wireless Sensor Networks. In Proceedings of the International Conference on Innovations in Information Technology, Abu Dhabi, United Arab Emirates, 25–27 April 2011; pp. 167–172. [Google Scholar]
- Shu, J.; Zhang, R.; Liu, L.; Wu, Z.; Zhou, Z. Cluster-based Three-dimensional Localization Algorithm for Large Scale Wireless Sensor Networks. J. Comput. 2009, 4, 1–3. [Google Scholar] [CrossRef]
- Savarese, C. Robust Positioning Algorithms for Distributed Ad-Hoc Wireless Sensor Networks. In Proceedings of the General Track of the Conference on Usenix Technical Conference, Berkeley, CA, USA, 10–15 June 2002; pp. 317–327. [Google Scholar]
- Lei, X.; Shi, W. Stepwise refinement localization algorithm for wireless sensor network. Chin. J. Sci. Instrum. 2008, 29, 314–319. [Google Scholar]
- Yang, L.; Giannakis, G.B. Ultra-wideband communications: an idea whose time has come. IEEE Signal Process. Mag. 2004, 21, 26–54. [Google Scholar] [CrossRef]
- Gezici, S.; Tian, Z.; Giannakis, G.B.; Kobayashi, H. Localization via ultra-wideband radios: A look at positioning aspects for future sensor networks. IEEE Signal Process. Mag. 2005, 22, 70–84. [Google Scholar] [CrossRef]
- Blumenthal, J.; Grossmann, R.; Golatowski, F.; Timmermann, D. Weighted Centroid Localization in Zigbee-based Sensor Networks. In Proceedings of the IEEE International Symposium on Intelligent Signal Processing, Alcala de Henares, Spain, 3–5 Octber 2007; pp. 1–6. [Google Scholar]
- Wang, J.; Chen, H. Study of Improved DV-Hop Localization Algorithm in Wireless Sensor Network. Int. J. Online Eng. 2013, 9, 66–70. [Google Scholar] [CrossRef]
- Stoleru, R.; He, T.; Mathiharan, S.S.; George, S.M.; Stankovic, J.A. Asymmetric Event-Driven Node Localization in Wireless Sensor Networks. IEEE Trans. Parallel Distrib. Syst. 2011, 23, 634–642. [Google Scholar] [CrossRef]
- Han, T.; Lu, X.; Lan, Q. Pattern recognition based Kalman filter for indoor localization using TDOA algorithm. Appl. Math. Model. 2010, 34, 2893–2900. [Google Scholar] [CrossRef]
- Gezici, S.; Sahinoglu, Z.; Molisch, A.F.; Kobayashi, H.; Poor, H.V. Two-Step Time of Arrival Estimation for Pulse-Based Ultra-Wideband Systems. EURASIP J. Adv. Signal Process. 2007, 2008, 1–11. [Google Scholar] [CrossRef]
- Gezici, S. A Survey on Wireless Position Estimation. Wirel. Pers. Commun. 2008, 44, 263–282. [Google Scholar] [CrossRef]
- Tsai, C. A localization system of a mobile robot by fusing dead-reckoning and ultrasonic measurements. IEEE Trans. Instrum. Meas. 1998, 47, 1399–1404. [Google Scholar] [CrossRef]
- Zhang, J.; Li, S.; Lu, G.; Zhou, Q. A new wireless sensor localization and pose tracking system for an Autonomous Mobile Robot. In Proceedings of the International Conference on Mechatronics and Automation, Xi’an, China, 4–7 August 2010; pp. 1971–1975. [Google Scholar]
- Wang, C.; Ma, H. Data Collection with Multiple Controlled Mobile Nodes in Wireless Sensor Networks. In Proceedings of the IEEE International Conference on Parallel and Distributed Systems, Tainan, Taiwan, 7–9 December 2011; pp. 489–496. [Google Scholar]
- Jiang, J.A.; Zheng, X.Y.; Chen, Y.F.; Wang, C.H. A Distributed RSS-Based Localization Using a Dynamic Circle Expanding Mechanism. IEEE Sens. J. 2013, 13, 3754–3766. [Google Scholar] [CrossRef]
- Savvides, A.; Han, C.C.; Strivastava, M.B. Dynamic fine-grained localization in Ad-Hoc networks of sensors. In Proceedings of the International Conference on Mobile Computing and Networking, Rome, Italy, 16–21 July 2001; pp. 166–179. [Google Scholar]
- Niculescu, D. Error Characteristics of Ad Hoc Positioning Systems. In Proceedings of the ACM Interational Symposium on Mobile Ad Hoc Network and Computing (MOBIHOC 2004), Tokyo, Japan, 24–26 May 2004; pp. 20–30. [Google Scholar]
- Whitehouse, K.; Karlof, C.; Woo, A.; Jiang, F.; Culler, D. The effects of ranging noise on multihop localization: An empirical study. In Proceedings of the International Symposium on Information Processing in Sensor Networks, Los Angeles, CA, USA, 24–27 April 2005; p. 10. [Google Scholar]
- Labat-Robert, J.; Robert, L. Revisiting trilateration for robot localization. IEEE Trans. Robot. 2005, 21, 93–101. [Google Scholar]
- Yang, Z.; Liu, Y. Quality of Trilateration: Confidence Based Iterative Localization. In Proceedings of the International Conference on Distributed Computing Systems, Piscataway, NJ, USA, May 2008; pp. 446–453. [Google Scholar]
- Yang, Z.; Liu, Y.; Li, X. Beyond Trilateration: On the Localizability of Wireless Ad Hoc Networks. IEEE/ACM Trans. Netw. 2010, 18, 1806–1814. [Google Scholar] [CrossRef]
- Dubbelman, G.; Duisterwinke, E.; Demi, L.; Talnishnikh, E. Robust sensor cloud localization from range measurements. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 3820–3827. [Google Scholar]
- Mao, G.; Fidan, B.; Anderson, B.D.O. Wireless sensor network localization techniques. Comput. Netw. 2007, 51, 2529–2553. [Google Scholar] [CrossRef]
- Xiong, L. A selective model to suppress NLOS signals in angle-of-arrival (AOA) location estimation. In Proceedings of the IEEE International Symposium on Personal, Indoor and Mobile Radio Communications, Boston, MA, USA, 8–11 September 1998; Volume 1, pp. 461–465. [Google Scholar]
- Chen, P. A Non-Line-Of-Sight Error Mitigation Algorithm In Location Estimation. In Proceedings of the Wireless Communications and Networking Conference (WCNC), New Orleans, LA, USA, 21–24 September 1999; Volume 1, pp. 316–320. [Google Scholar]
- Wylie, M.P.; Holtzman, J. The non-line of sight problem in mobile location estimation. In Proceedings of the IEEE International Conference on Universal Personal Communications, Piscataway, NJ, USA, 29 September–2 October 1996; Volume 2, pp. 827–831. [Google Scholar]
- Wei, B.; Yu, Z.; Huang, Z.; Chen, Z.; Wan, S. Weighting Trilateration Method in Local Positioning System. CN 102,540,140 B 3 July 2013. [Google Scholar]
- Qi, Y.; Kobayashi, H.; Suda, H. On Time-of-arrival Positioning in a Multipath Environment. IEEE Trans. Veh. Technol. 2006, 55, 1516–1526. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Selection Schemes of the Anchor Nodes | Proposed Method | LS-Based Trilateration |
|---|---|---|
| ID: 1, 2, 3 | 0.2649 | 1.7385 |
| ID: 1, 2, 3, 4 | 0.1783 | 1.0801 |
| ID: 1, 2, 3, 4, 5 | 0.0729 | 0.6868 |
| ID: 1, 2, 3, 4, 5, 6 | 0.2117 | 0.9004 |
| Selection Schemes of the Anchor Nodes | Proposed Method | LS-Based Method | RANSAC-Based Method |
|---|---|---|---|
| ID:1,2,3 | 1.1200 | 3.6839 | 3.6839 |
| ID:1,2,3,4 | 0.4651 | 3.6839 | 1.2258 |
| ID:1,2,3,4,5 | 1.2605 | 3.6839 | 1.4073 |
| ID:1,2,3,4,5,6 | 1.3790 | 1.5140 | 1.3239 |
| ID:1,2,3,4,5,6,7 | 0.6654 | 1.5140 | 1.2814 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Yue, X.; Chen, J.; Deng, F. A Novel Robust Trilateration Method Applied to Ultra-Wide Bandwidth Location Systems. Sensors 2017, 17, 795. https://doi.org/10.3390/s17040795
Li J, Yue X, Chen J, Deng F. A Novel Robust Trilateration Method Applied to Ultra-Wide Bandwidth Location Systems. Sensors. 2017; 17(4):795. https://doi.org/10.3390/s17040795
Chicago/Turabian StyleLi, Jiahong, Xianghu Yue, Jie Chen, and Fang Deng. 2017. "A Novel Robust Trilateration Method Applied to Ultra-Wide Bandwidth Location Systems" Sensors 17, no. 4: 795. https://doi.org/10.3390/s17040795
APA StyleLi, J., Yue, X., Chen, J., & Deng, F. (2017). A Novel Robust Trilateration Method Applied to Ultra-Wide Bandwidth Location Systems. Sensors, 17(4), 795. https://doi.org/10.3390/s17040795