Rapid Texture Optimization of Three-Dimensional Urban Model Based on Oblique Images



Abstract
:1. Introduction
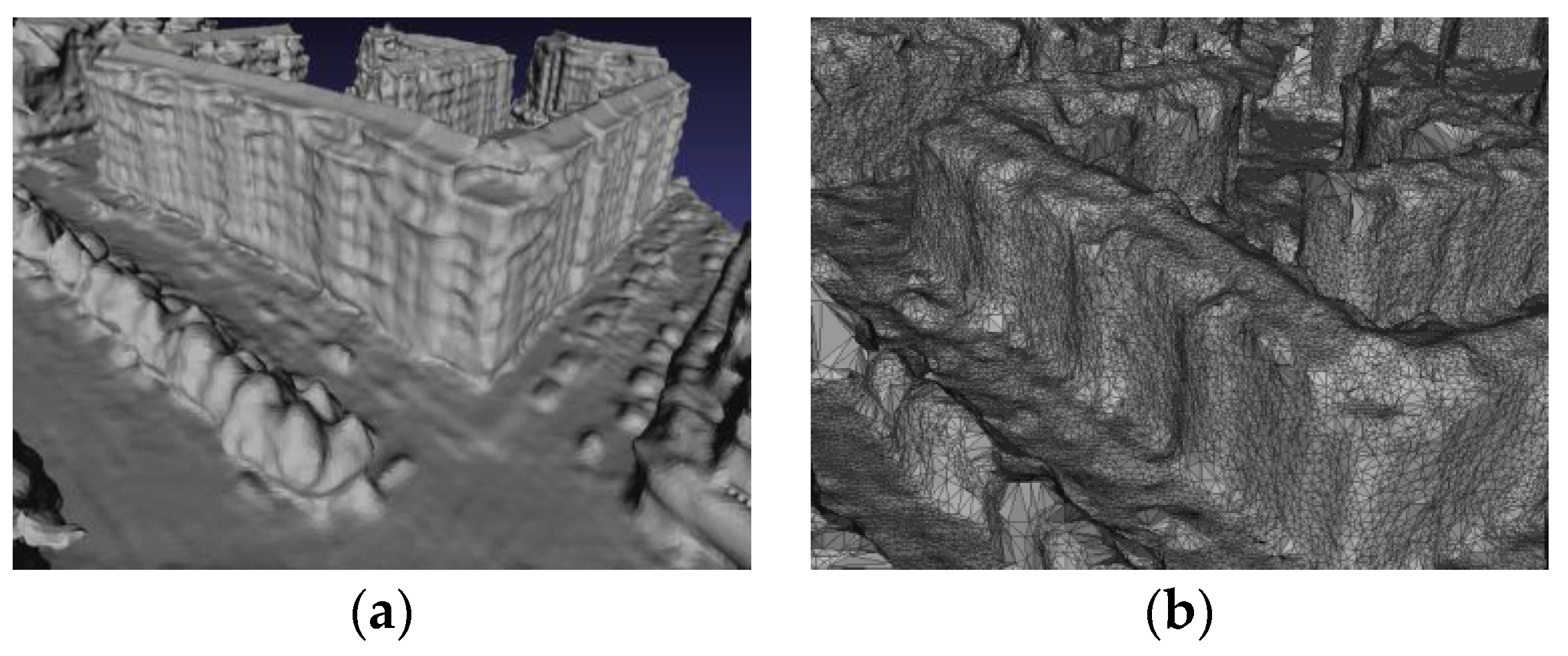
2. 3D Urban Surface Model
3. Image Radiation Preprocessing
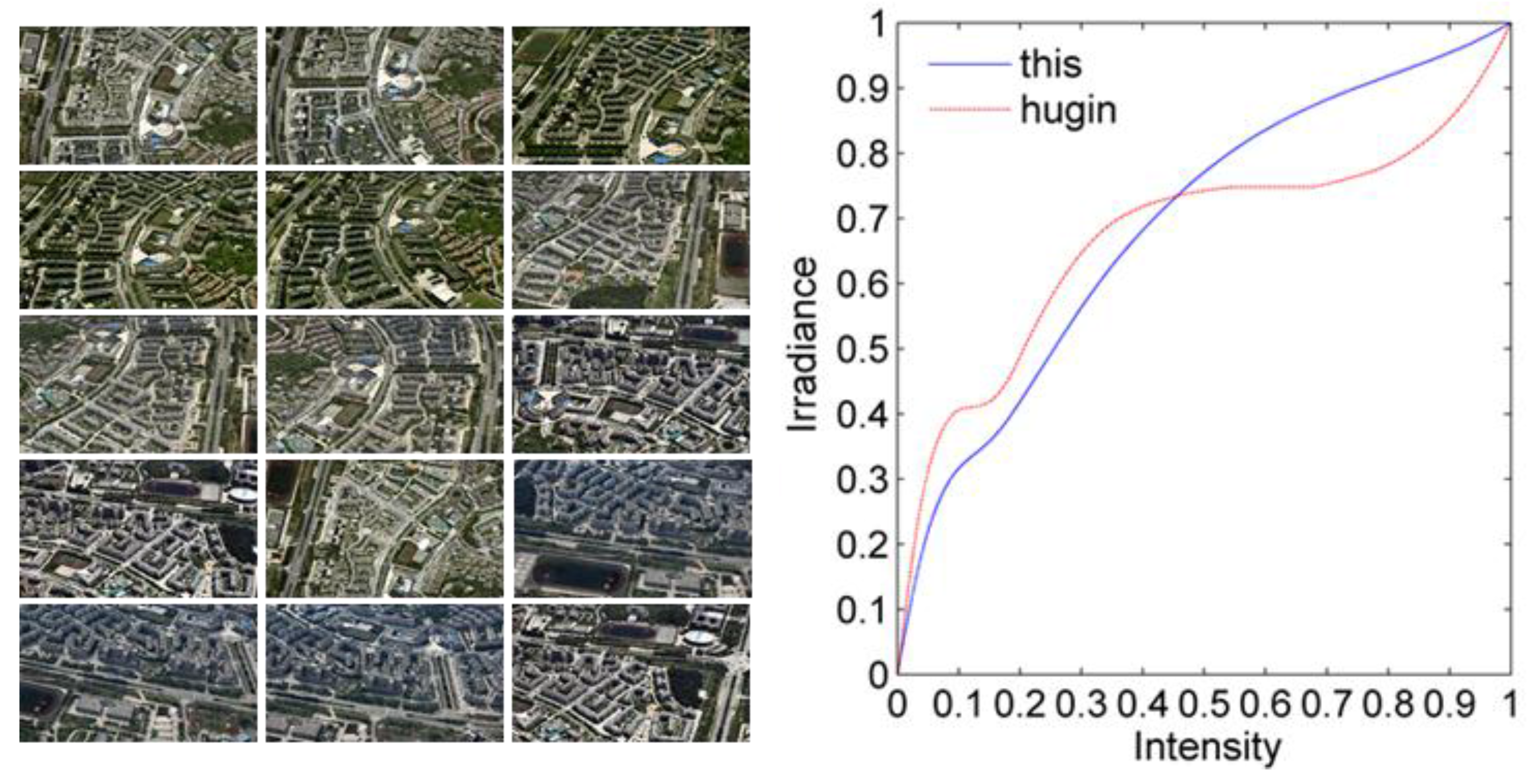
3.1. Correction of Environmental Radiation Error
3.2. Correction of Camera System Error
4. Establishing a Visible Images List
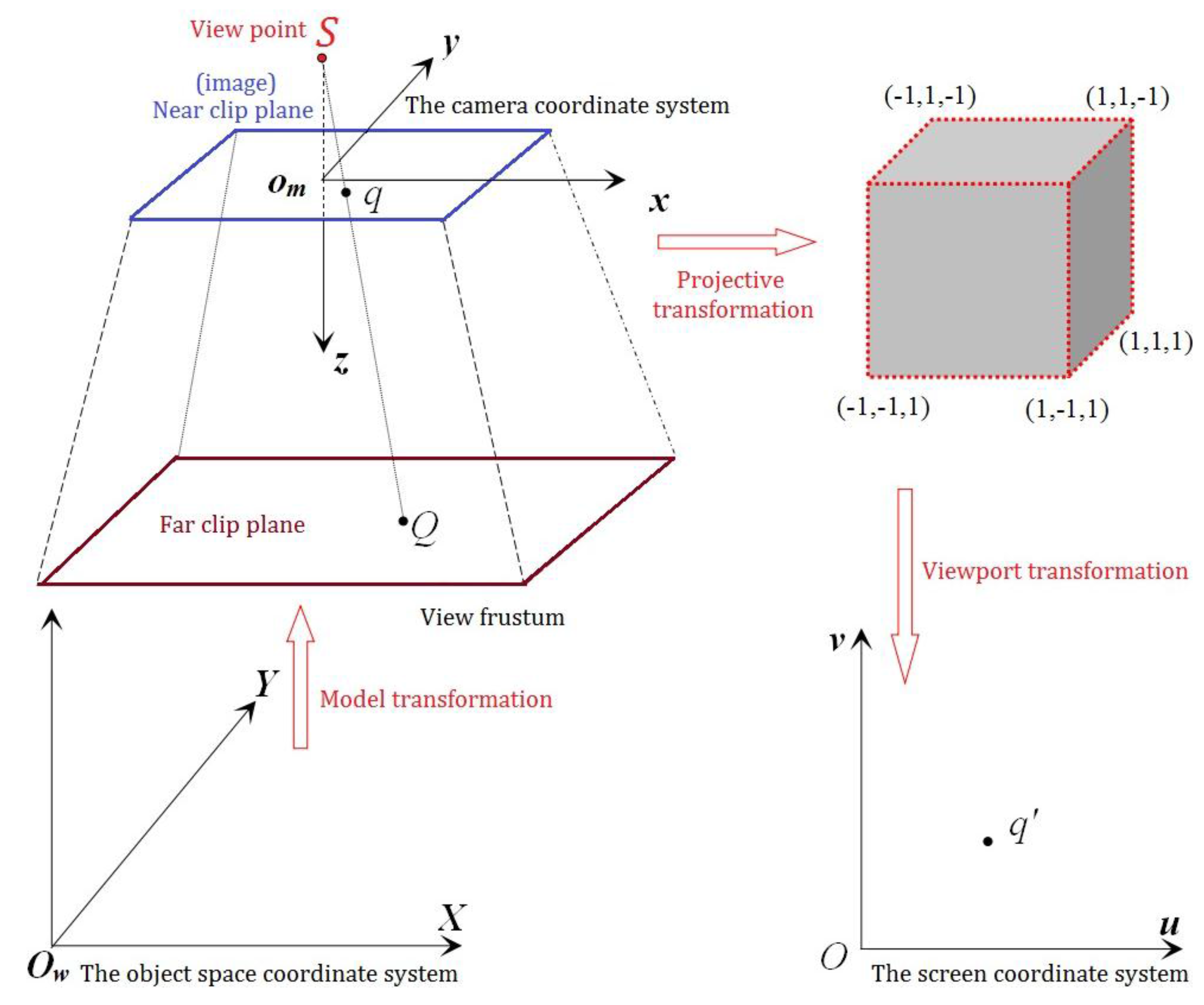
4.1. OpenGL-Based Occlusion Detection
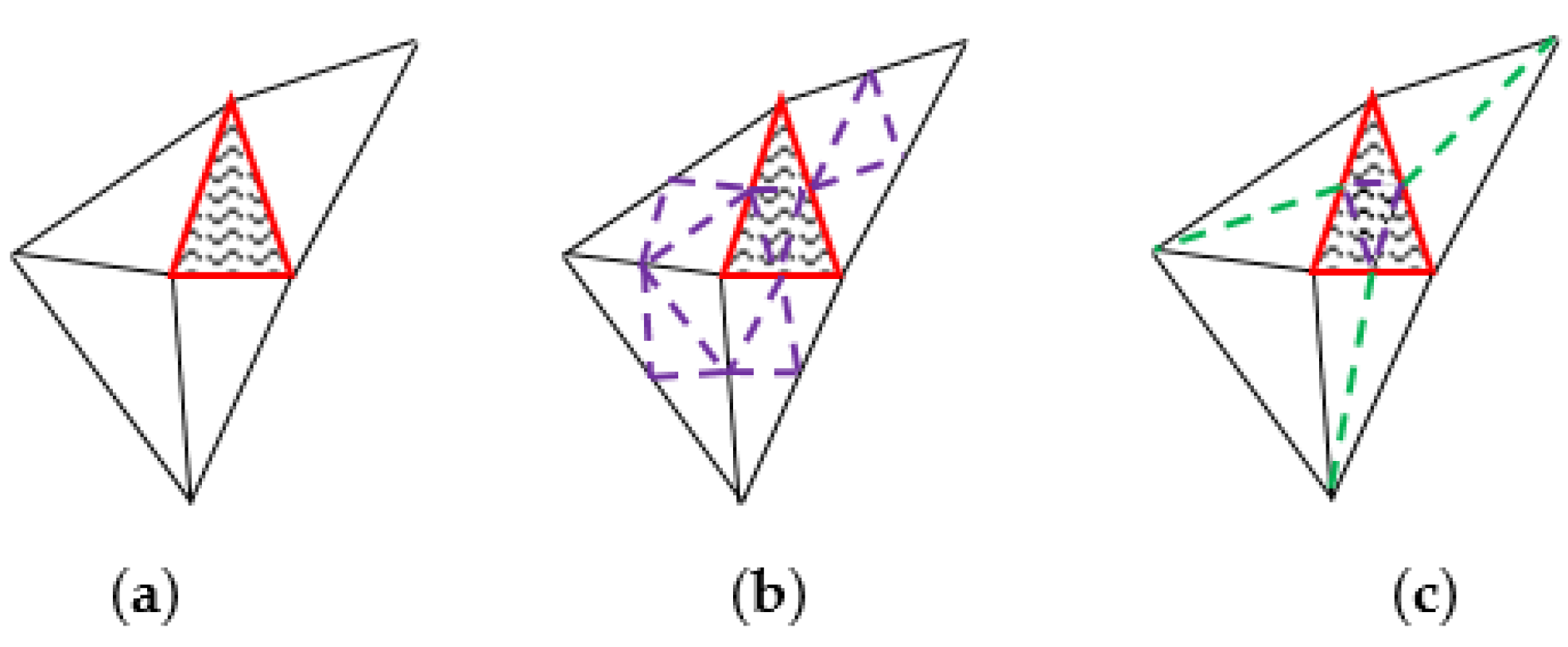
4.2. Adaptive Partial Occluded Triangular Facet Subdivision
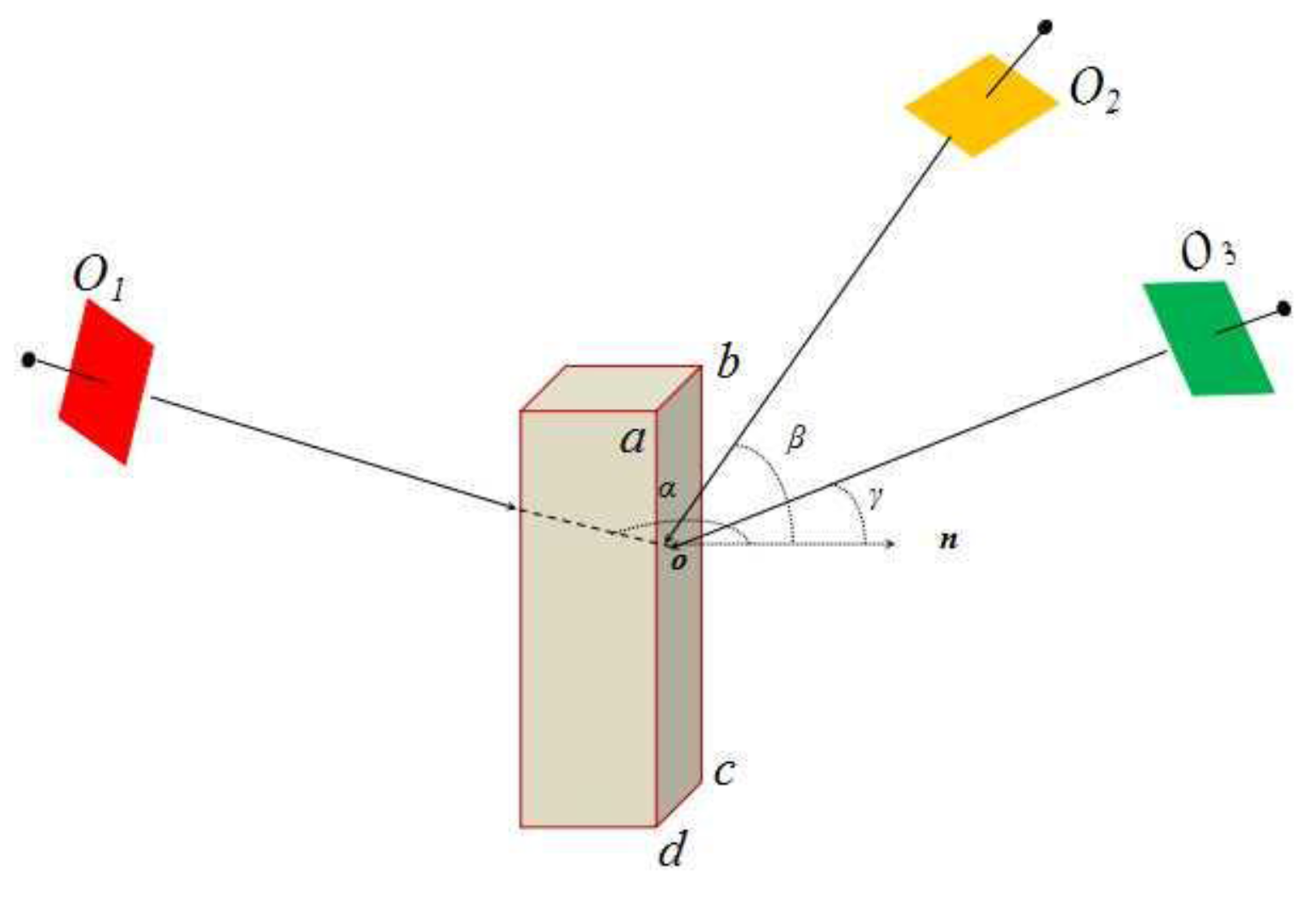
4.3. Priority Principle of Visible Images
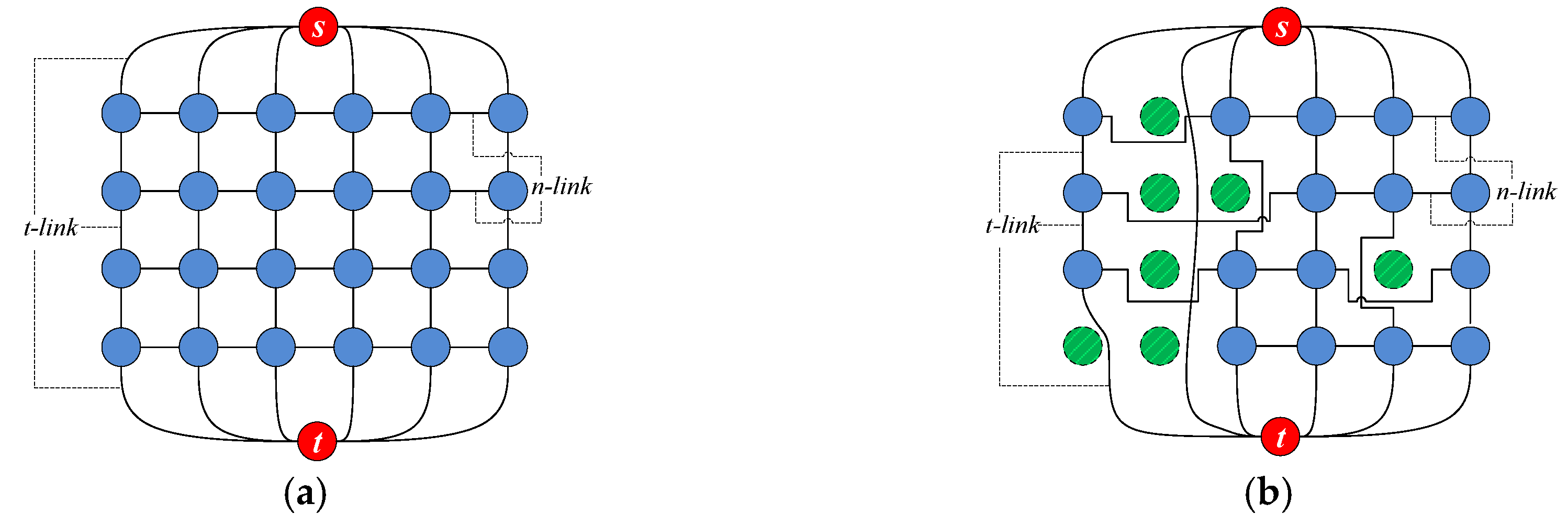
5. Texture Clustering and Selection Based on Graph-Cuts
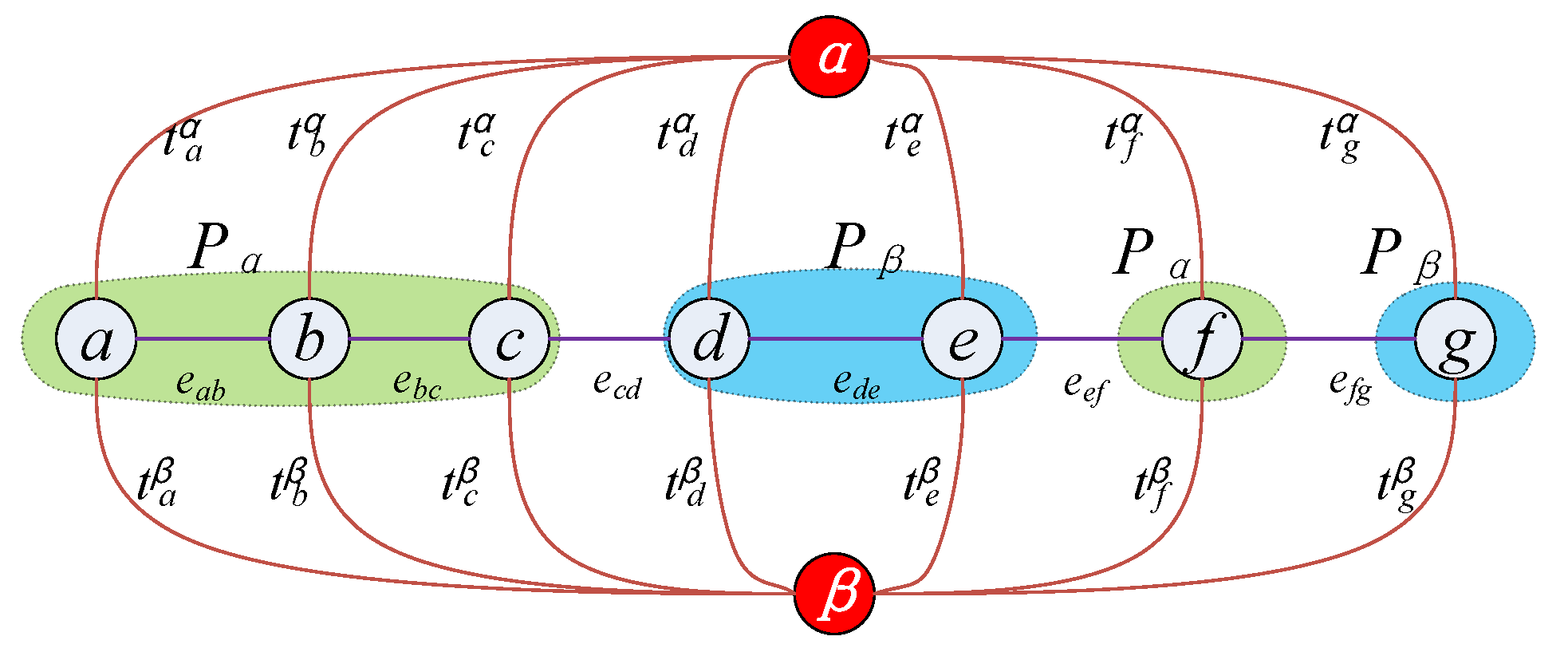
5.1. Label Graph Construction
5.2. Energy Function Construction
5.3. Energy Minimization Solution
6. Experiments and Analysis
6.1. Experimental Data and Environment
6.2. Pyramid Design of PagedLoad
6.3. Results Analysis
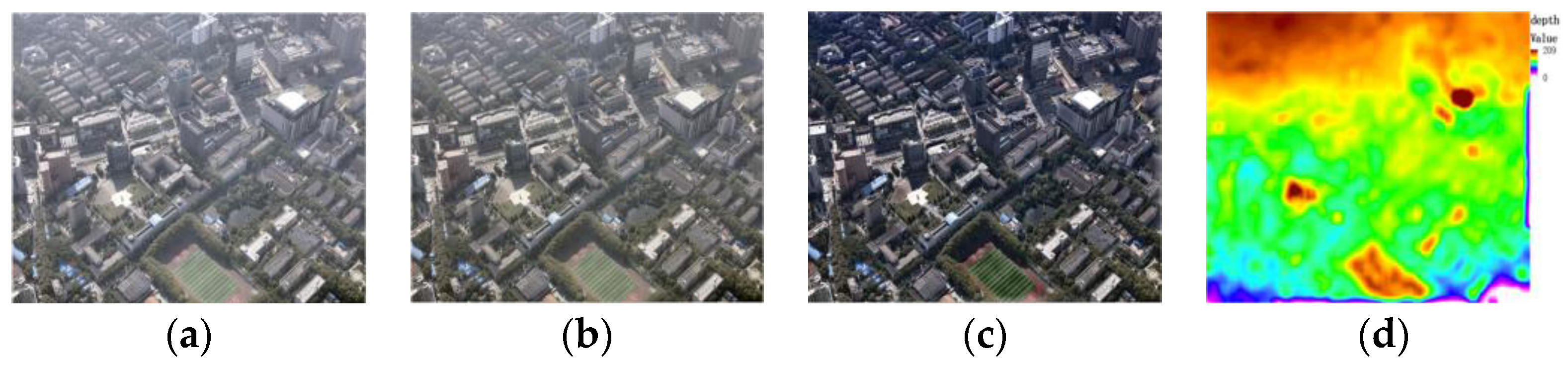
6.3.1. Comparison of Image Radiometric Correction
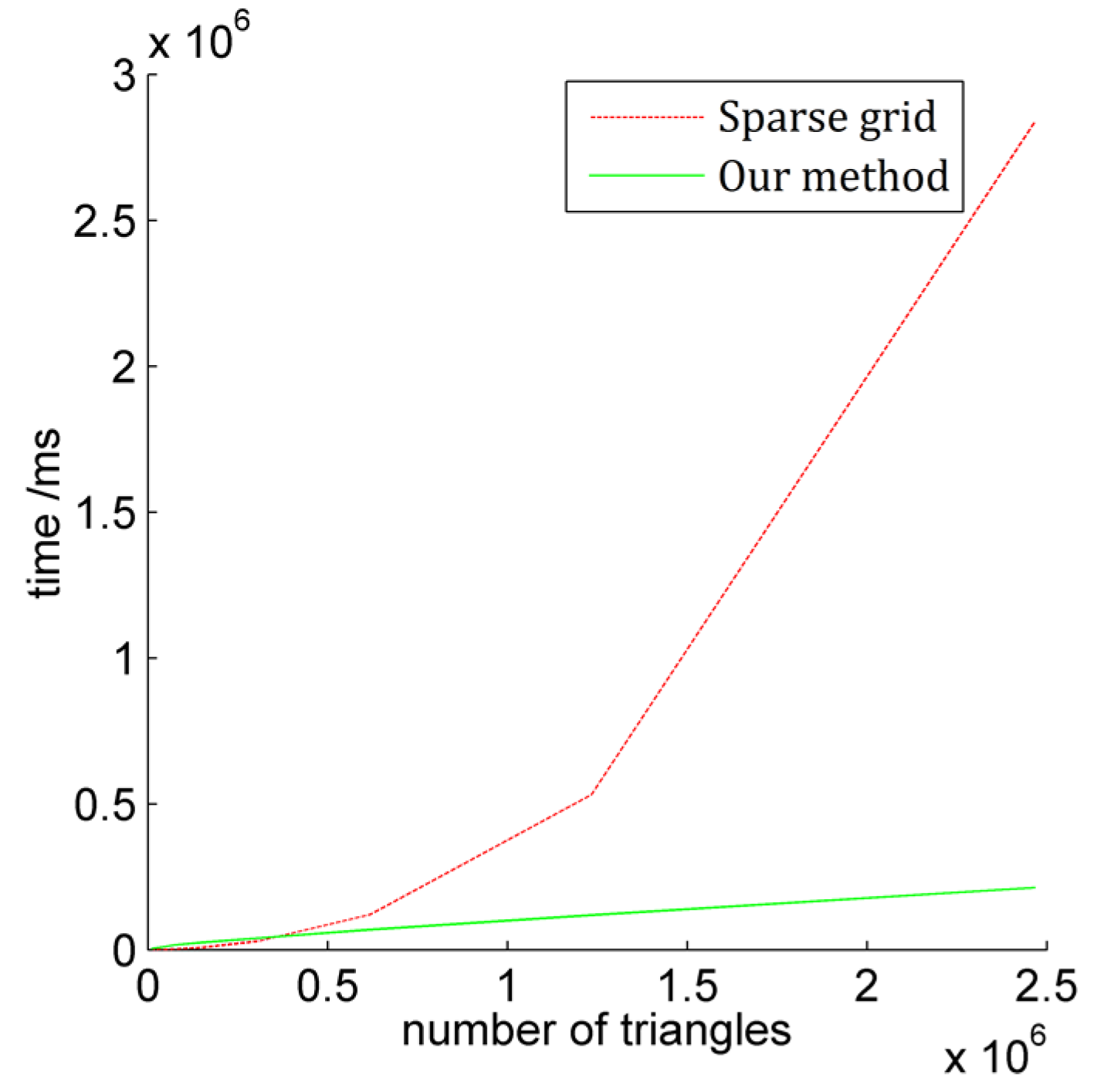
6.3.2. Efficiency Analysis of Occlusion Detection
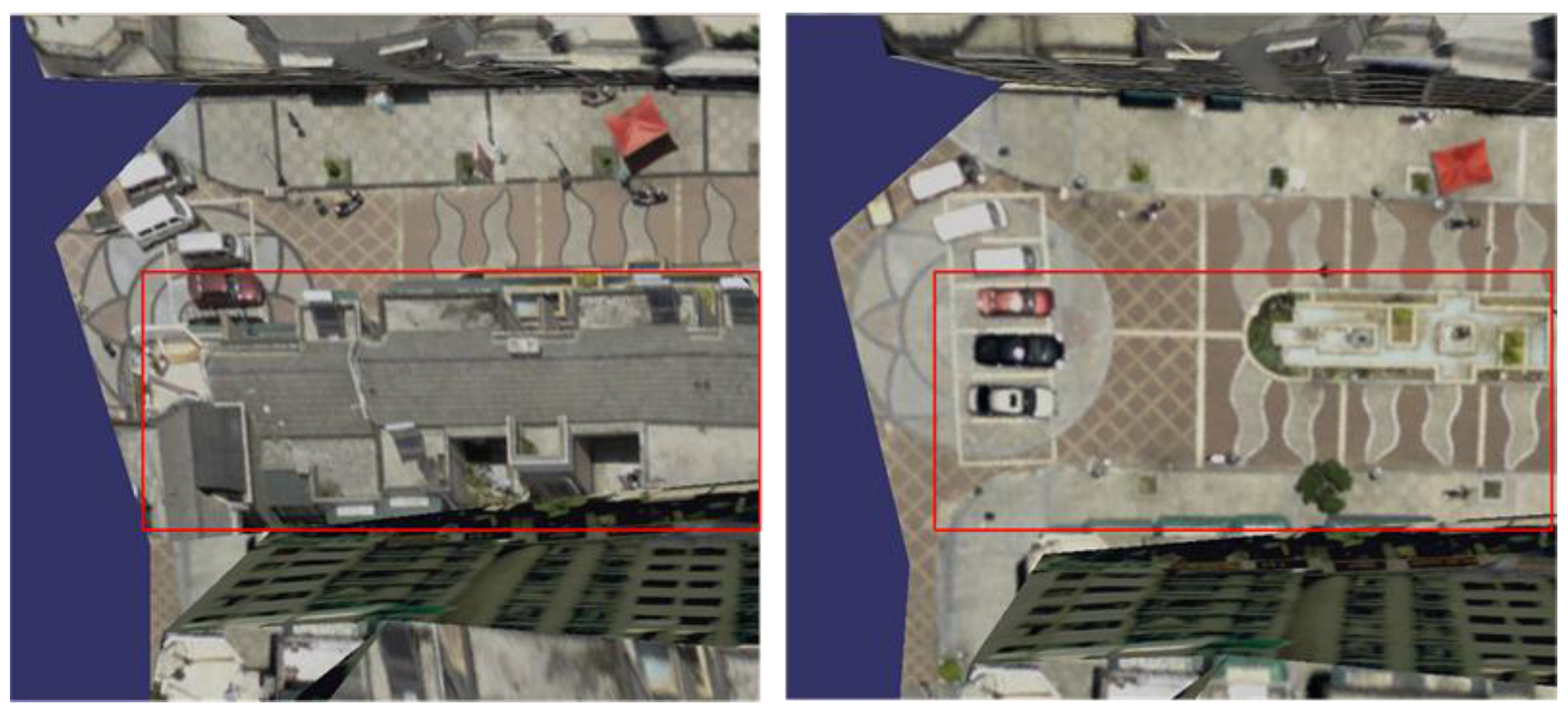
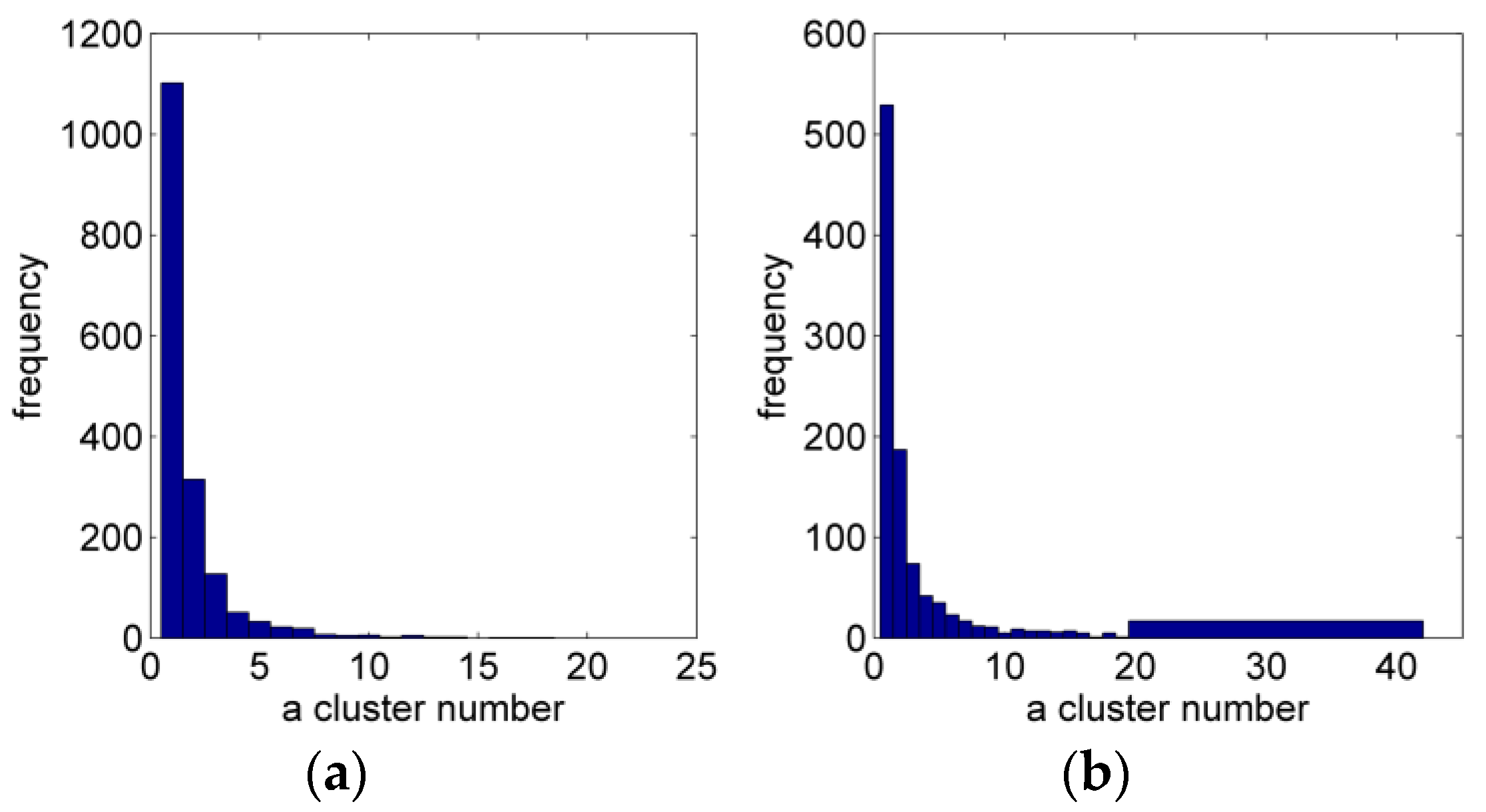
6.3.3. Comparison of Texture Clustering and Selection
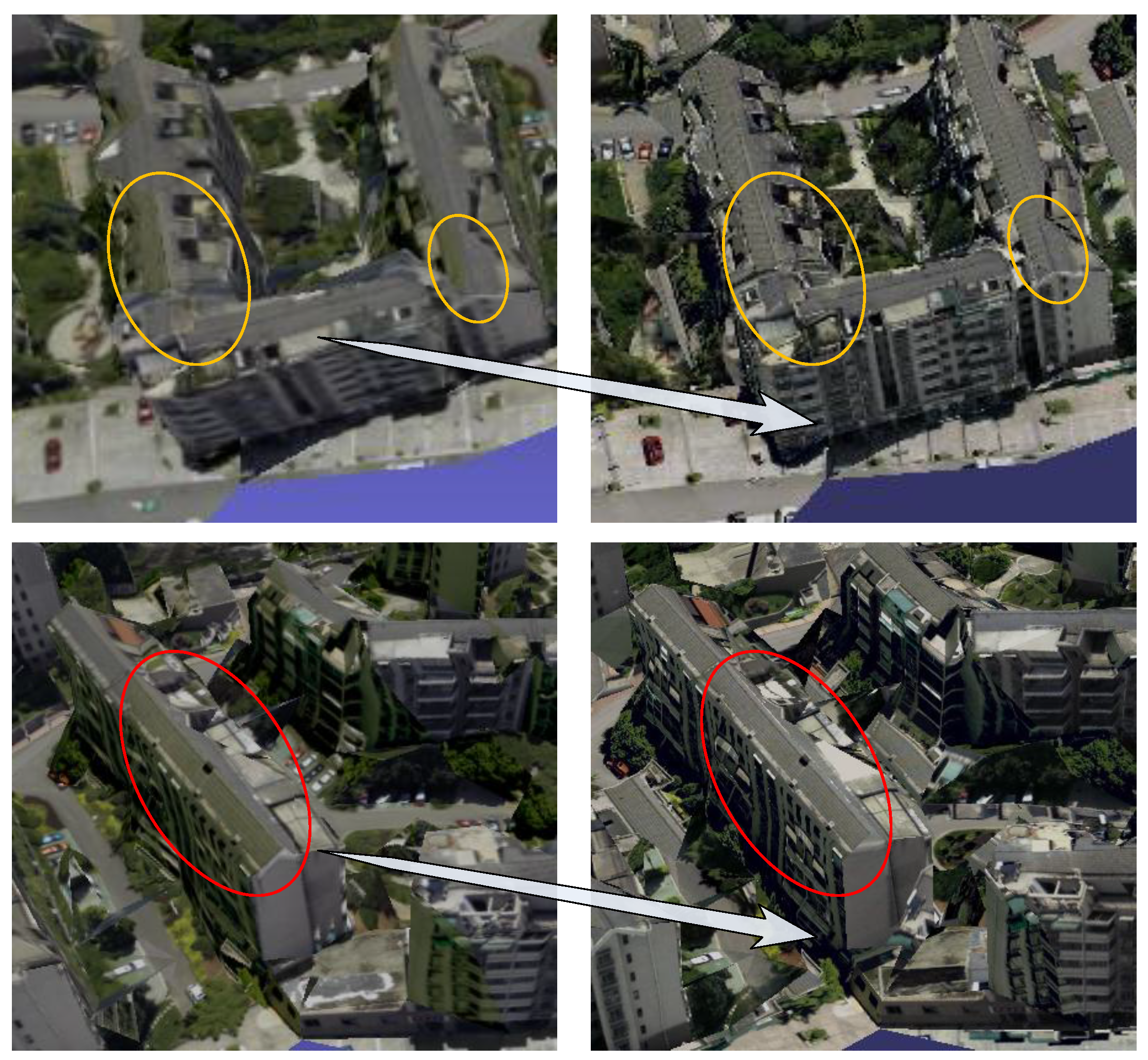
6.3.4. Effect Analysis of 3D Texture Reconstruction
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Goesele, M.; Curless, B.; Seitz, S. Multi-view stereo revisited. In Proceedings of the Computer Vision and Pattern Recognition, New York, NY, USA, 17–22 June 2006; Volume 2, pp. 2402–2409. [Google Scholar]
- Kazhdan, M.; Bolitho, M.; Hoppe, H. Poisson surface reconstruction. In Proceedings of the Symposium on Geometry Processing, Cagliari, Italy, 26–28 June 2006; pp. 61–70. [Google Scholar]
- Brown, M.; Lowe, D. Automatic Panoramic Image Stitching using Invariant Features. Int. Comput. Vis. 2007, 74, 59–73. [Google Scholar] [CrossRef]
- Furukawa, Y.; Ponce, J. Accurate, dense, and robust multi-view stereopsis. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 32, 505–512. [Google Scholar] [CrossRef] [PubMed]
- Schoning, J.; Heidemann, G. Evaluation of multi-view 3D reconstruction software. In Proceedings of the Computer Analysis of Images and Patterns, Valletta, Malta, 2–4 September 2015; pp. 450–461. [Google Scholar]
- Soucy, M.; Godin, G.; Rioux, M. A texture-mapping approach for the compression of colored 3D triangulations. Vis. Comput. 1996, 12, 503–514. [Google Scholar] [CrossRef]
- Debevec, P.; Yu, Y.; Boshokov, G. Efficient View-Dependent Image-Based Rendering with Projective Texture-Mapping. In Proceedings of the Eurographics Symposium on Rendering Techniques, Vienna, Austria, 29 June–1 July 1998; pp. 105–116. [Google Scholar]
- Bernardini, F.; Martin, I.; Rushmeier, H. High-quality texture reconstruction from multiple scans. IEEE Trans. Vis. Comput. Graph. 2001, 7, 318–332. [Google Scholar] [CrossRef]
- Baumberg, A. Blending images for texturing 3D models. In Proceedings of the British Machine Vision Conference, Cardiff, UK, 2–5 September 2002; pp. 404–413. [Google Scholar]
- Kim, C.; Rhee, E. Realistic Facade Texturing of Digital Building Models. Softw. Eng. Appl. 2014, 8, 193–202. [Google Scholar] [CrossRef]
- Luo, Q.; Zhou, G.; Zhang, G.; Hang, J. The texture extraction and mapping of buildings with occlusion detection. In Proceedings of the International Geoscience and Remote Sensing Symposium, Milan, Italy, 26–31 July 2015; pp. 3002–3005. [Google Scholar]
- Frueh, C.; Jain, S.; Zakhor, A. Data Processing Algorithms for Generating Textured 3D Building Facade Meshes from Laser Scans and Camera Images. Int. J. Comput. Vis. 2005, 61, 159–184. [Google Scholar] [CrossRef]
- Iwaszczuk, D.; Hoegner, L.; Stilla, U. Quality-based building-texture selection from different sensors. In Proceedings of the Urban Remote Sensing Event (JURSE), Lausanne, Switzerland, 30 March–1 April 2015; pp. 1–4. [Google Scholar]
- Gal, R.; Wexler, Y.; Hoppe, H.; Cohenor, D. Seamless Montage for Texturing Models. Comput. Graph. Forum 2010, 29, 479–486. [Google Scholar] [CrossRef]
- Li, D.; Wang, M.; Pan, J. Auto-dodging processing and its application for optical RS image. Geomat. Inf. Sci. Wuhan Univ. 2006, 31, 753–756. [Google Scholar]
- Luo, S. Improved dodging algorithm based on Wallis principle. Geomat. Sci. Technol. 2015, 3, 51–58. [Google Scholar] [CrossRef]
- He, K.; Tang, X. Single Image Haze Removal Using Dark Channel Prior. IEEE Tran. Pattern Anal. Mach. Intell. 2011, 33, 2341–2353. [Google Scholar]
- Dangelo, P. Radio metric alignment and vignetting calibration. In Proceedings of the International Conference on Computer Vision System, Bielefeld, Germany, 21–24 March 2007. [Google Scholar]
- Hartley, R.; Zisserman, A. Multiple View Geometry in Computer Vision, 2nd ed.; Cambridge University Press: London, UK, 2000. [Google Scholar]
- Zhang, Z.; Su, G.; Zhen, S.; Zhang, J. Relation OpenGL imaging process with exterior and interior parameters of photogrammetry. Geomat. Inf. Sci. Wuhan Univ. 2004, 29, 570–574. [Google Scholar]
- Boykov, Y.; Veksler, O.; Zabih, R. Fast approximate energy minimization via graph cuts. IEEE Trans. Pattern Anal. Mach. Intell. 2001, 23, 1222–1239. [Google Scholar] [CrossRef]
- Schmidt, M.; Alahari, K. Generalized Fast Approximate Energy Minimization via Graph Cuts: Alpha-Expansion Beta-Shrink Moves. In Proceedings of the Uncertainty in Artificial Intelligence, Barcelona, Spain, 14–17 July 2011. [Google Scholar]
- Hussmann, S.; Ringbeck, T.; Hagebeuker, B. A Performance Review of 3D TOF Vision Systems in Comparison to Stereo Vision Systems; InTech: Vienna, Austria, 2008. [Google Scholar]
- Zhang, C.; Zhang, W.; Guo, B.; Liu, J.; Li, M. Rapidly 3D texture reconstruction based on oblique photograph. Acta Geod. Cartogr. Sin. 2015, 44, 782–790. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| The Number of Triangular Facets | Convergent Rate of Energy Function | Number of Iterations | Energy Difference of Adjacent Iteration |
|---|---|---|---|
| 3117 | 7.678 s | 5 | 58.4, 5.8, 6.7, 4.2 |
| 7643 | 12.488 s | 6 | 97.2, 68.4, 30.0, 3.6, 1.0 |
| 32,522 | 35.553 s | 5 | 351.1, 66.8, 58.5, 20.2 |
| 136,834 | 162.729 s | 4 | 1178.2, 278.3, 36.3 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, W.; Li, M.; Guo, B.; Li, D.; Guo, G. Rapid Texture Optimization of Three-Dimensional Urban Model Based on Oblique Images. Sensors 2017, 17, 911. https://doi.org/10.3390/s17040911
Zhang W, Li M, Guo B, Li D, Guo G. Rapid Texture Optimization of Three-Dimensional Urban Model Based on Oblique Images. Sensors. 2017; 17(4):911. https://doi.org/10.3390/s17040911
Chicago/Turabian StyleZhang, Weilong, Ming Li, Bingxuan Guo, Deren Li, and Ge Guo. 2017. "Rapid Texture Optimization of Three-Dimensional Urban Model Based on Oblique Images" Sensors 17, no. 4: 911. https://doi.org/10.3390/s17040911
APA StyleZhang, W., Li, M., Guo, B., Li, D., & Guo, G. (2017). Rapid Texture Optimization of Three-Dimensional Urban Model Based on Oblique Images. Sensors, 17(4), 911. https://doi.org/10.3390/s17040911