Zero-Sum Matrix Game with Payoffs of Dempster-Shafer Belief Structures and Its Applications on Sensors


Abstract
:1. Introduction
2. Preliminaries
2.1. Basics of Dempster-Shafer Evidence Theory
2.2. D-S Belief Structures Defined on the Real Line
3. Two-Person Zero-Sum Matrix Game and Its Extension of D-S Belief Structures
4. Proposed Method to Solve Zero-Sum Matrix Games with D-S Belief Structure Payoffs
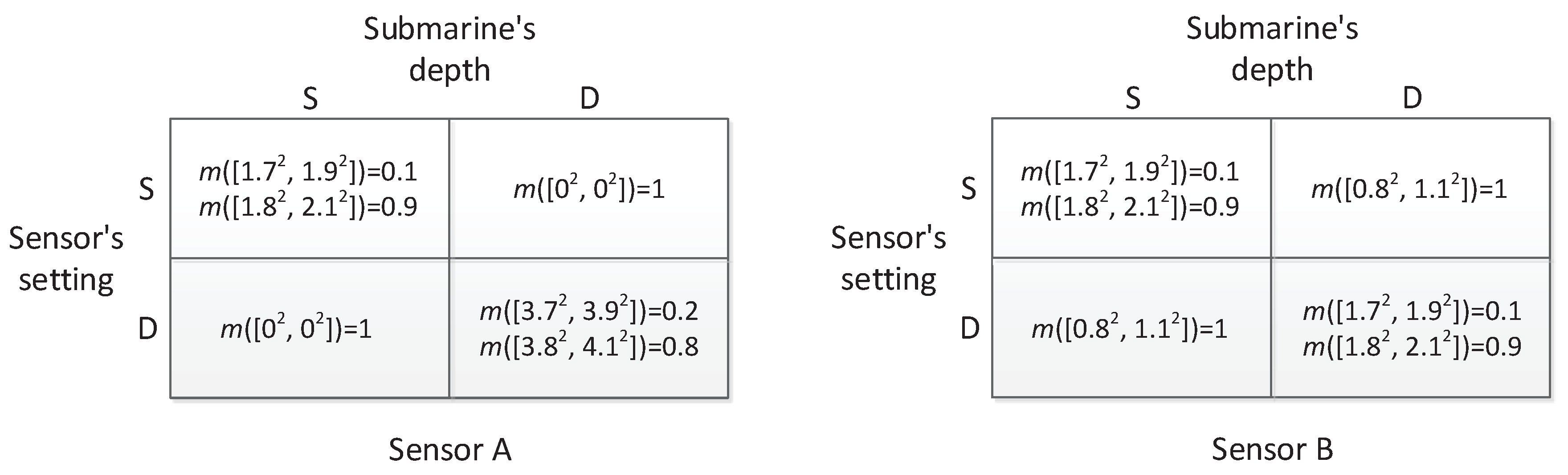
- “Decompose”: A zero-sum matrix game with D-S belief structure payoffs , where with and , is decomposed into zero-sum matrix games with interval data , and , where is the number of focal elements in belief structure , and is a focal element extracting from . Each has a belief degree indicated by to express its probability of occurrence, which is determined by all in I. For example, Table 1 shows a zero-sum matrix game with D-S belief structure payoffs, which can be decomposed into the following four zero-sum matrix games with interval data:with belief degree .with belief degree .with belief degree .with belief degree .
- “Calculate”: In this step, the values of obtained interval-valued matrix games are calculated. At present, there are many existing approaches to solve a zero-sum matrix game with interval data. A well-developed approach proposed by Liu and Kao [34] is employed to solve these interval-valued matrix games in the paper. Given a zero-sum matrix game with interval data , where , and , according to Liu and Kao’s approach, the lower bound of the value of the game, denoted as , is calculated by:and:. The upper bound of the value of the game, denoted as , is calculated by:and:. For example, the values of the four interval-valued matrix games associated with Table 1 are calculated. For , the value is with belief degree . The value of is with belief degree . The value of is with belief degree . The value of is with belief degree .
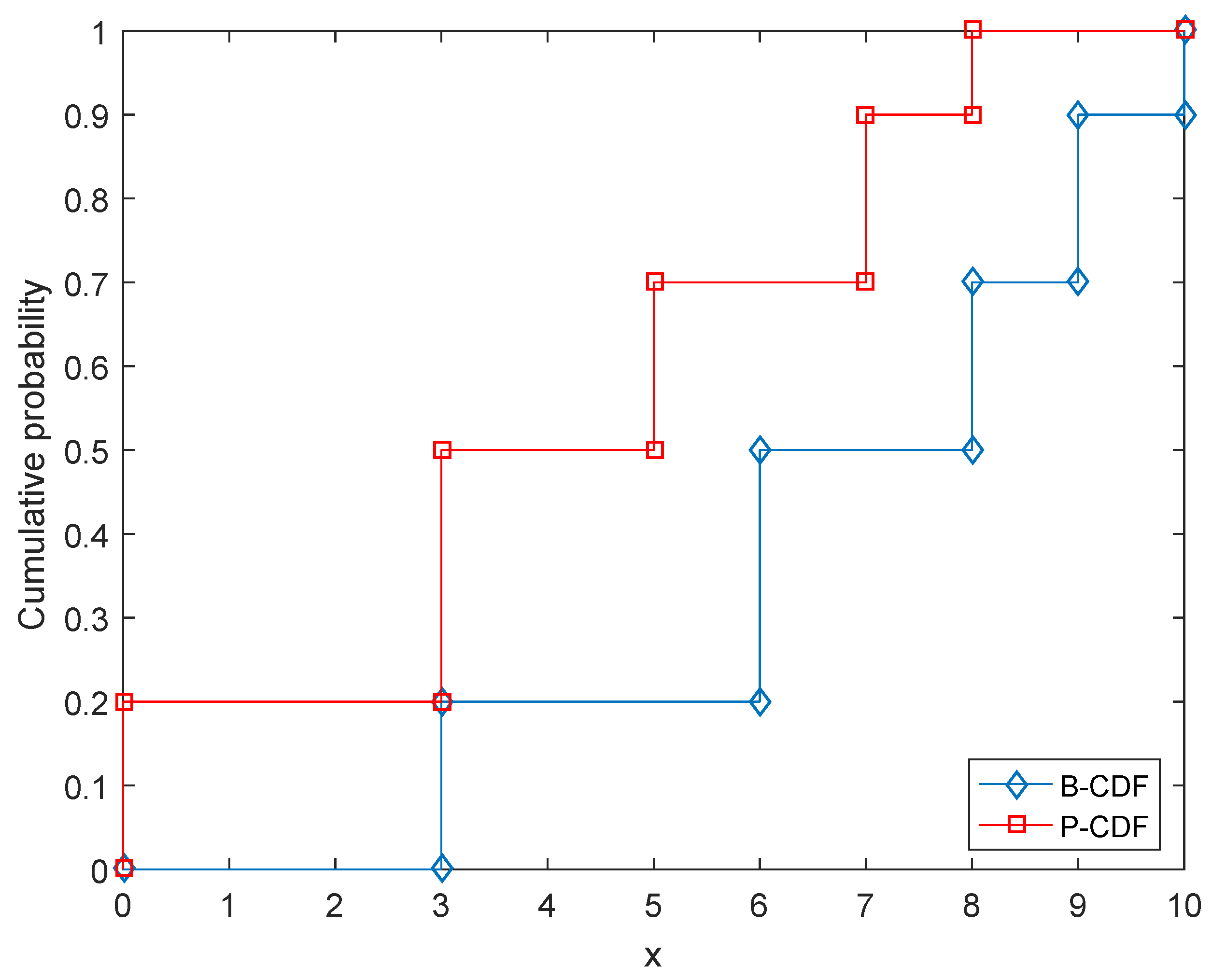
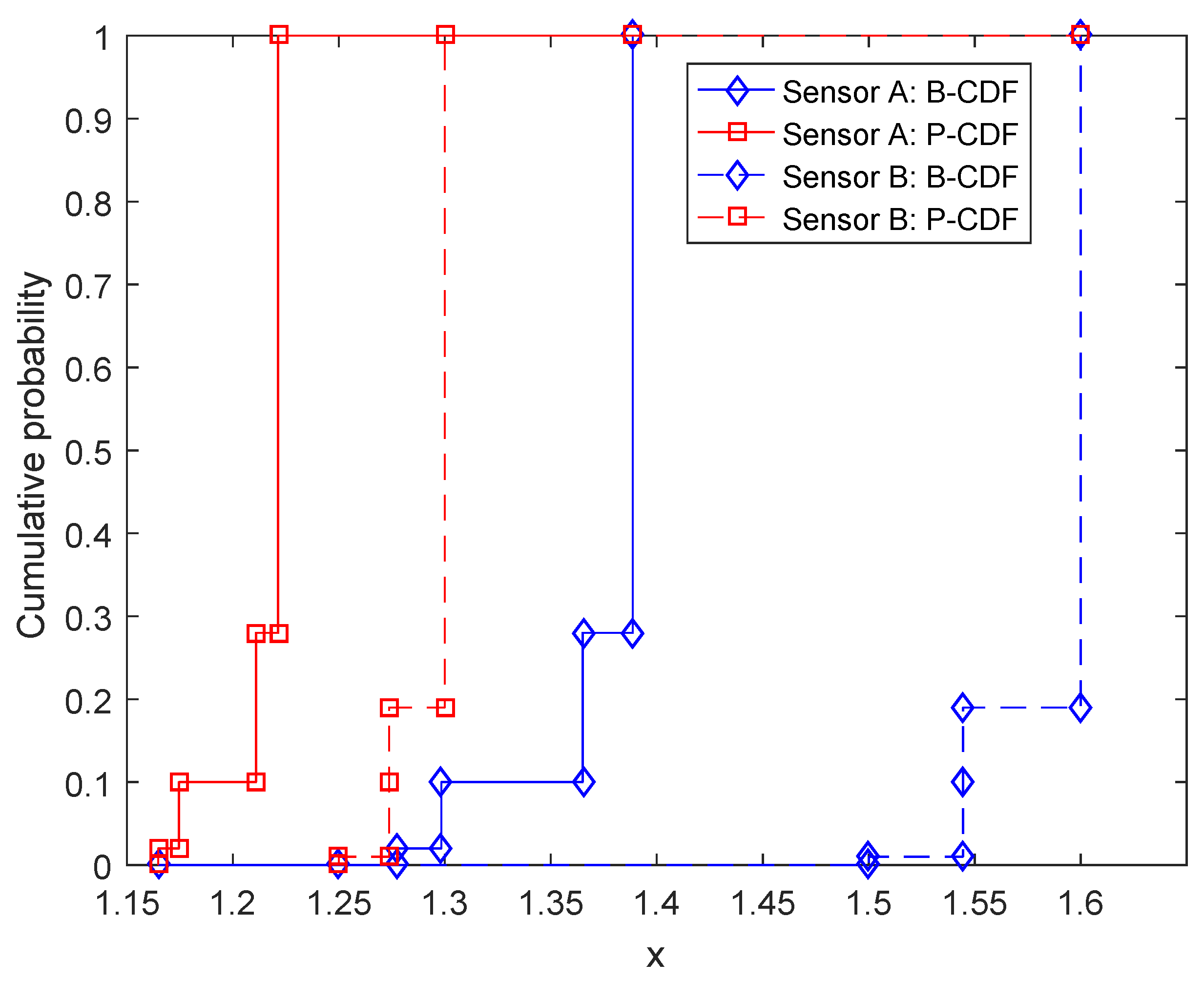
- “Compose”: In this step, the values calculated by the above step are composed to form an overall value for the zero-sum matrix game with belief structure payoffs. Let us still use the game shown in Table 1 as the example. According to the step “calculate”, the values of interval-valued matrix games associated with the game shown in Table 1 are with belief degree , with belief degree , with belief degree and with belief degree , respectively. Therefore, the value of the matrix game shown in Table 1 is , , , . This value is also in the form of D-S belief structures; its CDF is shown in Figure 2.
5. Alternative Solution: A Monte Carlo Simulation Approach Based on the Latin Hypercube Sampling
| Algorithm 1: The Latin hypercube sampling (LHS)-based Monte Carlo simulation approach to solve a zero-sum matrix game with D-S belief structure payoffs. |
| INPUT: Zero-sum matrix game with D-S belief structure payoffs , where with and ; Sampling size T OUTPUT: B-CDF, P-CDF Generate a T-by- matrix L containing a LHS of T values on each of variables; FOR k = 1 : stepsize 1 : T FOREACH in M Get a focal element in terms of ; END Generate an interval-valued matrix game according to all ; Solve based on Equations (12)–(15), the obtained value is denoted as ; END Once having all , , then (i) calculate the B-CDF according to Equation (5); (ii) calculate the P-CDF according to Equation (6); where . |
6. Applications
6.1. An Illustrative Application in Sensor Selection
6.2. Another Application on the Intrusion Detection in Sensor Networks
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Klir, G.; Yuan, B. Fuzzy Sets and Fuzzy Logic: Theory and Applications; Prentice Hall: Upper Saddle River, NJ, USA, 1995. [Google Scholar]
- Jousselme, A.L.; Liu, C.; Grenier, D.; Bossé, É. Measuring ambiguity in the evidence theory. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2006, 36, 890–903. [Google Scholar] [CrossRef]
- Zadeh, L.A. Fuzzy sets. Inf. Control 1965, 8, 338–353. [Google Scholar] [CrossRef]
- Pawlak, Z. Rough sets. Int. J. Comput. Inf. Sci. 1982, 11, 341–356. [Google Scholar] [CrossRef]
- Dempster, A.P. Upper and lower probabilities induced by a multivalued mapping. Ann. Math. Stat. 1967, 38, 325–339. [Google Scholar] [CrossRef]
- Shafer, G. A Mathematical Theory of Evidence; Princeton University Press: Princeton, NJ, USA, 1976. [Google Scholar]
- Palmieri, F.A.; Ciuonzo, D. Objective priors from maximum entropy in data classification. Inf. Fusion 2013, 14, 186–198. [Google Scholar] [CrossRef]
- An, L.; Li, M.; Zhang, P.; Wu, Y.; Jia, L.; Song, W. Discriminative random fields based on maximum entropy principle for semisupervised SAR image change detection. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 3395–3404. [Google Scholar] [CrossRef]
- Jiang, W.; Xie, C.; Luo, Y.; Tang, Y. Ranking Z-numbers with an improved ranking method for generalized fuzzy numbers. J. Intell. Fuzzy Syst. 2017, 32, 1931–1943. [Google Scholar] [CrossRef]
- Palmieri, F.; Ciuonzo, D. Data fusion with entropic priors. Procedings of the 20th Italian Workshop on Neural Networks, WIRN, Frontiers in Artificial Intelligence and Applications, Salerno, Italy, 27–29 May 2010; Volume 226, pp. 107–114. [Google Scholar]
- Chen, T.M.; Venkataramanan, V. Dempster-Shafer theory for intrusion detection in ad hoc networks. IEEE Internet Comput. 2005, 9, 35–41. [Google Scholar] [CrossRef]
- Jiang, W.; Zhan, J. A modified combination rule in generalized evidence theory. Appl. Intell. 2017, 46, 630–640. [Google Scholar] [CrossRef]
- Deng, X.; Hu, Y.; Deng, Y.; Mahadevan, S. Supplier selection using AHP methodology extended by D numbers. Expert Syst. Appl. 2014, 41, 156–167. [Google Scholar] [CrossRef]
- Deng, X.; Hu, Y.; Deng, Y.; Mahadevan, S. Environmental impact assessment based on D numbers. Expert Syst. Appl. 2014, 41, 635–643. [Google Scholar] [CrossRef]
- Sun, L.; Liu, Y.; Zhang, B.; Shang, Y.; Yuan, H.; Ma, Z. An integrated decision-making model for transformer condition assessment using game theory and modified evidence combination extended by D numbers. Energies 2016, 9, 697. [Google Scholar] [CrossRef]
- Zhou, X.; Deng, X.; Deng, Y.; Mahadevan, S. Dependence assessment in human reliability analysis based on D numbers and AHP. Nucl. Eng. Des. 2017, 313, 243–252. [Google Scholar] [CrossRef]
- Liu, H.C.; You, J.X.; Fan, X.J.; Lin, Q.L. Failure mode and effects analysis using D numbers and grey relational projection method. Expert Syst. Appl. 2014, 41, 4670–4679. [Google Scholar] [CrossRef]
- Zhou, X.; Shi, Y.; Deng, X.; Deng, Y. D-DEMATEL: A new method to identify critical success factors in emergency management. Saf. Sci. 2017, 91, 93–104. [Google Scholar] [CrossRef]
- Wang, Z.; Bauch, C.T.; Bhattacharyya, S.; d’Onofrio, A.; Manfredi, P.; Perc, M.; Perra, N.; Salathé, M.; Zhao, D. Statistical physics of vaccination. Phys. Rep. 2016, 664, 1–113. [Google Scholar] [CrossRef]
- Wang, Z.; Kokubo, S.; Jusup, M.; Tanimoto, J. Universal scaling for the dilemma strength in evolutionary games. Phys. Life Rev. 2015, 14, 1–30. [Google Scholar] [CrossRef] [PubMed]
- Deng, X.; Han, D.; Dezert, J.; Deng, Y.; Shyr, Y. Evidence combination from an evolutionary game theory perspective. IEEE Trans. Cybern. 2016, 46, 2070–2082. [Google Scholar] [CrossRef] [PubMed]
- Caponetto, R.; Fortuna, L.; Fazzino, S.; Xibilia, M.G. Chaotic sequences to improve the performance of evolutionary algorithms. IEEE Trans. Evol. Comput. 2003, 7, 289–304. [Google Scholar] [CrossRef]
- Lee, J.; Pak, D. A Game Theoretic Optimization Method for Energy Efficient Global Connectivity in Hybrid Wireless Sensor Networks. Sensors 2016, 16, 1380. [Google Scholar] [CrossRef] [PubMed]
- Abdalzaher, M.S.; Seddik, K.; Elsabrouty, M.; Muta, O.; Furukawa, H.; Abdel-Rahman, A. Game Theory Meets Wireless Sensor Networks Security Requirements and Threats Mitigation: A Survey. Sensors 2016, 16, 1003. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Jusup, M.; Wang, R.W.; Shi, L.; Iwasa, Y.; Moreno, Y.; Kurths, J. Onymity promotes cooperation in social dilemma experiments. Sci. Adv. 2017, 3, e1601444. [Google Scholar] [CrossRef]
- Chen, Y.; Weng, S.; Guo, W.; Xiong, N. A Game Theory Algorithm for Intra-Cluster Data Aggregation in a Vehicular Ad Hoc Network. Sensors 2016, 16, 245. [Google Scholar] [CrossRef] [PubMed]
- Washburn, A. Two-Person Zero-Sum Games; Springer Science & Business Media: New York, NY, USA, 2013; Volume 201. [Google Scholar]
- von Neumann, J.; Morgenstern, O. Theory of Games and Economic Behavior; Princeton University Press: Princeton, NJ, USA, 1944. [Google Scholar]
- Li, D.F. Linear Programming Models and Methods of Matrix Games With Payoffs of Triangular Fuzzy Numbers; Springer: New York, NY, USA, 2016. [Google Scholar]
- Li, D.F.; Nan, J.X.; Zhang, M.J. Interval programming models for matrix games with interval payoffs. Optim. Methods Softw. 2012, 27, 1–16. [Google Scholar] [CrossRef]
- Li, D.F. Linear programming approach to solve interval-valued matrix games. Omega 2011, 39, 655–666. [Google Scholar] [CrossRef]
- Collins, W.D.; Hu, C. Studying interval valued matrix games with fuzzy logic. Soft Comput. 2008, 12, 147–155. [Google Scholar] [CrossRef]
- Mitchell, C.; Hu, C.; Chen, B.; Nooner, M.; Young, P. A computational study of interval-valued matrix games. In Proceedings of the International Conference on Computational Science and Computational Intelligence (CSCI), Las Vegas, NV, USA, 10–13 March 2014; Volume 1, pp. 347–352. [Google Scholar]
- Liu, S.T.; Kao, C. Matrix games with interval data. Comput. Ind. Eng. 2009, 56, 1697–1700. [Google Scholar] [CrossRef]
- Li, D.F. An effective methodology for solving matrix games with fuzzy payoffs. IEEE Trans. Cybern. 2013, 43, 610–621. [Google Scholar] [PubMed]
- Dutta, B.; Gupta, S. On Nash equilibrium strategy of two-person zero-sum games with trapezoidal fuzzy payoffs. Fuzzy Inf. Eng. 2014, 6, 299–314. [Google Scholar] [CrossRef]
- Kumar, S.; Chopra, R.; Saxena, R.R. A Fast Approach to Solve Matrix Games with Payoffs of Trapezoidal Fuzzy Numbers. Asia Pac. J. Oper. Res. 2016, 33, 1650047. [Google Scholar] [CrossRef]
- Chandra, S.; Aggarwal, A. On solving matrix games with pay-offs of triangular fuzzy numbers: Certain observations and generalizations. Eur. J. Oper. Res. 2015, 246, 575–581. [Google Scholar] [CrossRef]
- Roy, S.K.; Mula, P. Solving matrix game with rough payoffs using genetic algorithm. Oper. Res. 2016, 16, 117–130. [Google Scholar] [CrossRef]
- Nan, J.X.; Li, D.F.; Zhang, M.J. A lexicographic method for matrix games with payoffs of triangular intuitionistic fuzzy numbers. Int. J. Comput. Intell. Syst. 2010, 3, 280–289. [Google Scholar] [CrossRef]
- Li, D.F.; Nan, J.X. A nonlinear programming approach to matrix games with payoffs of Atanassov’s intuitionistic fuzzy sets. Int. J. Uncertain. Fuzziness Knowl. Based Syst. 2009, 17, 585–607. [Google Scholar] [CrossRef]
- Seikh, M.R.; Nayak, P.K.; Pal, M. Matrix games with intuitionistic fuzzy pay-offs. J. Inf. Optim. Sci. 2015, 36, 159–181. [Google Scholar] [CrossRef]
- Li, D.F. Mathematical-programming approach to matrix games with payoffs represented by Atanassov’s interval-valued intuitionistic fuzzy sets. IEEE Trans. Fuzzy Syst. 2010, 18, 1112–1128. [Google Scholar] [CrossRef]
- Xu, L.; Zhao, R.; Ning, Y. Two-person zero-sum matrix game with fuzzy random payoffs. In Proceedings of the International Conference on Intelligent Computing, Kunming, China, 16–19 August 2006; pp. 809–818. [Google Scholar]
- Xu, Y.; Liu, J.; Zhong, X.; Chen, S. Lattice-valued matrix game with mixed strategies for intelligent decision support. Knowl. Based Syst. 2012, 32, 56–64. [Google Scholar] [CrossRef]
- Xiong, W.; Luo, X.; Ma, W.; Zhang, M. Ambiguous games played by players with ambiguity aversion and minimax regret. Knowl. Based Syst. 2014, 70, 167–176. [Google Scholar] [CrossRef]
- Xiong, W. Games under ambiguous payoffs and optimistic attitudes. J. Appl. Math. 2014, 2014, 531987. [Google Scholar] [CrossRef]
- Deng, X.; Zheng, X.; Su, X.; Chan, F.T.; Hu, Y.; Sadiq, R.; Deng, Y. An evidential game theory framework in multi-criteria decision making process. Appl. Math. Comput. 2014, 244, 783–793. [Google Scholar] [CrossRef]
- Yager, R.R.; Alajlan, N. Evaluating Belief Structure Satisfaction to Uncertain Target Values. IEEE Trans. Cybern. 2016, 46, 869–877. [Google Scholar] [CrossRef] [PubMed]
- Xu, X.B.; Zheng, J.; Yang, J.B.; Xu, D.L.; Chen, Y.W. Data classification using evidence reasoning rule. Knowl. Based Syst. 2017, 116, 144–151. [Google Scholar] [CrossRef]
- Deng, Y. Deng entropy. Chaos Solitons Fractals 2016, 91, 549–553. [Google Scholar] [CrossRef]
- Jiang, W.; Xie, C.; Zhuang, M.; Tang, Y. Failure mode and effects analysis based on a novel fuzzy evidential method. Appl. Soft Comput. 2017. [Google Scholar] [CrossRef]
- Yang, M.; Lin, Y.; Han, X. Probabilistic Wind Generation Forecast Based on Sparse Bayesian Classification and Dempster-Shafer Theory. IEEE Trans. Ind. Appl. 2016, 52, 1998–2005. [Google Scholar] [CrossRef]
- Deng, X.; Xiao, F.; Deng, Y. An improved distance-based total uncertainty measure in belief function theory. Appl. Intell. 2017. [Google Scholar] [CrossRef]
- Han, D.; Dezert, J.; Duan, Z. Evaluation of probability transformations of belief functions for decision making. IEEE Trans. Syst. Man Cybern. Syst. 2016, 46, 93–108. [Google Scholar] [CrossRef]
- Yang, Y.; Han, D.Q.; Dezert, J. An angle-based neighborhood graph classifier with evidential reasoning. Pattern Recogn. Lett. 2016, 71, 78–85. [Google Scholar] [CrossRef]
- Jiang, W.; Wei, B.; Zhan, J.; Xie, C.; Zhou, D. A visibility graph power averaging aggregation operator: A methodology based on network analysis. Comput. Ind. Eng. 2016, 101, 260–268. [Google Scholar] [CrossRef]
- Jiang, W.; Wei, B.; Tang, Y.; Zhou, D. Ordered visibility graph average aggregation operator: An application in produced water management. Chaos 2017, 27, 023117. [Google Scholar] [CrossRef] [PubMed]
- Mo, H.; Deng, Y. A new aggregating operator in linguistic decision making based on D numbers. Int. J. Uncertain. Fuzziness Knowl. Based Syst. 2016, 24, 831–846. [Google Scholar] [CrossRef]
- Song, M.; Jiang, W.; Xie, C.; Zhou, D. A new interval numbers power average operator in multiple attribute decision making. Int. J. Intell. Syst. 2017, 32, 631–644. [Google Scholar] [CrossRef]
- Ciuonzo, D.; Romano, G.; Rossi, P.S. Channel-aware decision fusion in distributed MIMO wireless sensor networks: Decode-and-fuse vs. decode-then-fuse. IEEE Trans. Wirel. Commun. 2012, 11, 2976–2985. [Google Scholar] [CrossRef]
- Wang, H.; Yao, K.; Pottie, G.; Estrin, D. Entropy-based sensor selection heuristic for target localization. In Proceedings of the 3rd International Symposium on Information Processing in Sensor Networks, Berkeley, CA, USA, 26–27 April 2004; pp. 36–45. [Google Scholar]
- Ciuonzo, D.; Romano, G.; Rossi, P.S. Optimality of received energy in decision fusion over Rayleigh fading diversity MAC with non-identical sensors. IEEE Trans. Signal Process. 2013, 61, 22–27. [Google Scholar] [CrossRef]
- Dong, J.; Zhuang, D.; Huang, Y.; Fu, J. Advances in multi-sensor data fusion: Algorithms and applications. Sensors 2009, 9, 7771–7784. [Google Scholar] [CrossRef] [PubMed]
- Si, L.; Wang, Z.; Liu, X.; Tan, C.; Xu, J.; Zheng, K. Multi-sensor data fusion identification for shearer cutting conditions based on parallel quasi-newton neural networks and the Dempster-Shafer theory. Sensors 2015, 15, 28772–28795. [Google Scholar] [CrossRef] [PubMed]
- André, C.; Le Hégarat-Mascle, S.; Reynaud, R. Evidential framework for data fusion in a multi-sensor surveillance system. Eng. Appl. Artif. Intell. 2015, 43, 166–180. [Google Scholar] [CrossRef]
- Jiang, W.; Zhuang, M.; Xie, C.; Wu, J. Sensing attribute weights: A novel basic belief assignment method. Sensors 2017, 17, 721. [Google Scholar] [CrossRef] [PubMed]
- Khaleghi, B.; Khamis, A.; Karray, F.O.; Razavi, S.N. Multisensor data fusion: A review of the state-of-the-art. Inf. Fusion 2013, 14, 28–44. [Google Scholar] [CrossRef]
- Zois, E.N.; Anastassopoulos, V. Fusion of correlated decisions for writer verification. Pattern Recogn. 2001, 34, 47–61. [Google Scholar] [CrossRef]
- Tselios, K.; Zois, E.N.; Nassiopoulos, A.; Economou, G. Fusion of directional transitional features for off-line signature verification. In Proceedings of the International Joint Conference on Biometrics (IJCB), Washington, DC, USA, 11–13 October 2011; pp. 1–6. [Google Scholar]
- Yager, R.R. Cumulative distribution functions from Dempster-Shafer belief structures. IEEE Trans. Syst. Man Cybern. Part B Cybern. 2004, 34, 2080–2087. [Google Scholar] [CrossRef]
- Yager, R.R. Joint cumulative distribution functions for Dempster-Shafer belief structures using copulas. Fuzzy Optim. Decis. Mak. 2013, 12, 393–414. [Google Scholar] [CrossRef]
- Smets, P. Belief functions on real numbers. Int. J. Approx. Reason. 2005, 40, 181–223. [Google Scholar] [CrossRef]
- McKay, M.D.; Beckman, R.J.; Conover, W.J. Comparison of three methods for selecting values of input variables in the analysis of output from a computer code. Technometrics 1979, 21, 239–245. [Google Scholar] [CrossRef]
- Helton, J.C.; Davis, F.J. Latin hypercube sampling and the propagation of uncertainty in analyses of complex systems. Reliab. Eng. Syst. Saf. 2003, 81, 23–69. [Google Scholar] [CrossRef]
- Shields, M.D.; Zhang, J. The generalization of Latin hypercube sampling. Reliab. Eng. Syst. Saf. 2016, 148, 96–108. [Google Scholar] [CrossRef]
- Wang, Y.M.; Yang, J.B.; Xu, D.L. A preference aggregation method through the estimation of utility intervals. Comput. Oper. Res. 2005, 32, 2027–2049. [Google Scholar] [CrossRef]
- Ammari, H.M. The Art of Wireless Sensor Networks; Springer: New York, NY, USA, 2014. [Google Scholar]
- Liu, Y.; Man, H.; Comaniciu, C. A game theoretic approach to efficient mixed strategies for intrusion detection. In Proceedings of the IEEE International Conference on Communications, Istanbul, Turkey, 11–15 June 2006; Volume 5, pp. 2201–2206. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Strategy | ||
|---|---|---|
| Attack 1 | Attack 2 | Not Attack | |
|---|---|---|---|
| IDS1 | |||
| IDS2 | |||
| Not monitor | 0 |
| Attack 1 | Attack 2 | Not Attack | |
|---|---|---|---|
| IDS1 | |||
| IDS2 | |||
| Not monitor |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, X.; Jiang, W.; Zhang, J. Zero-Sum Matrix Game with Payoffs of Dempster-Shafer Belief Structures and Its Applications on Sensors. Sensors 2017, 17, 922. https://doi.org/10.3390/s17040922
Deng X, Jiang W, Zhang J. Zero-Sum Matrix Game with Payoffs of Dempster-Shafer Belief Structures and Its Applications on Sensors. Sensors. 2017; 17(4):922. https://doi.org/10.3390/s17040922
Chicago/Turabian StyleDeng, Xinyang, Wen Jiang, and Jiandong Zhang. 2017. "Zero-Sum Matrix Game with Payoffs of Dempster-Shafer Belief Structures and Its Applications on Sensors" Sensors 17, no. 4: 922. https://doi.org/10.3390/s17040922
APA StyleDeng, X., Jiang, W., & Zhang, J. (2017). Zero-Sum Matrix Game with Payoffs of Dempster-Shafer Belief Structures and Its Applications on Sensors. Sensors, 17(4), 922. https://doi.org/10.3390/s17040922