
Improving Passive Time Reversal Underwater Acoustic Communications Using Subarray Processing

Abstract
:1. Introduction
2. System Model
3. Receiver Algorithms
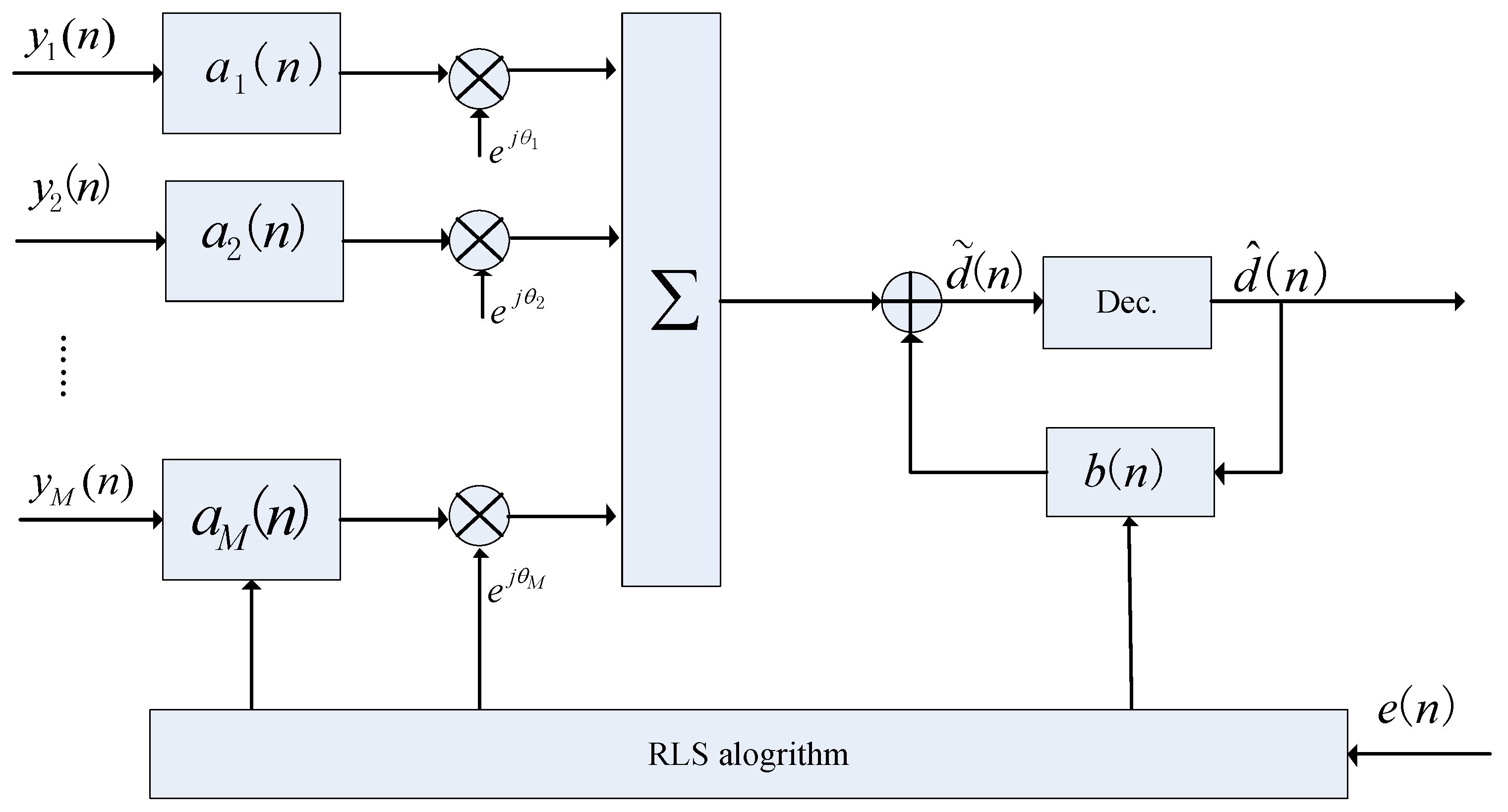
3.1. MC-DFE
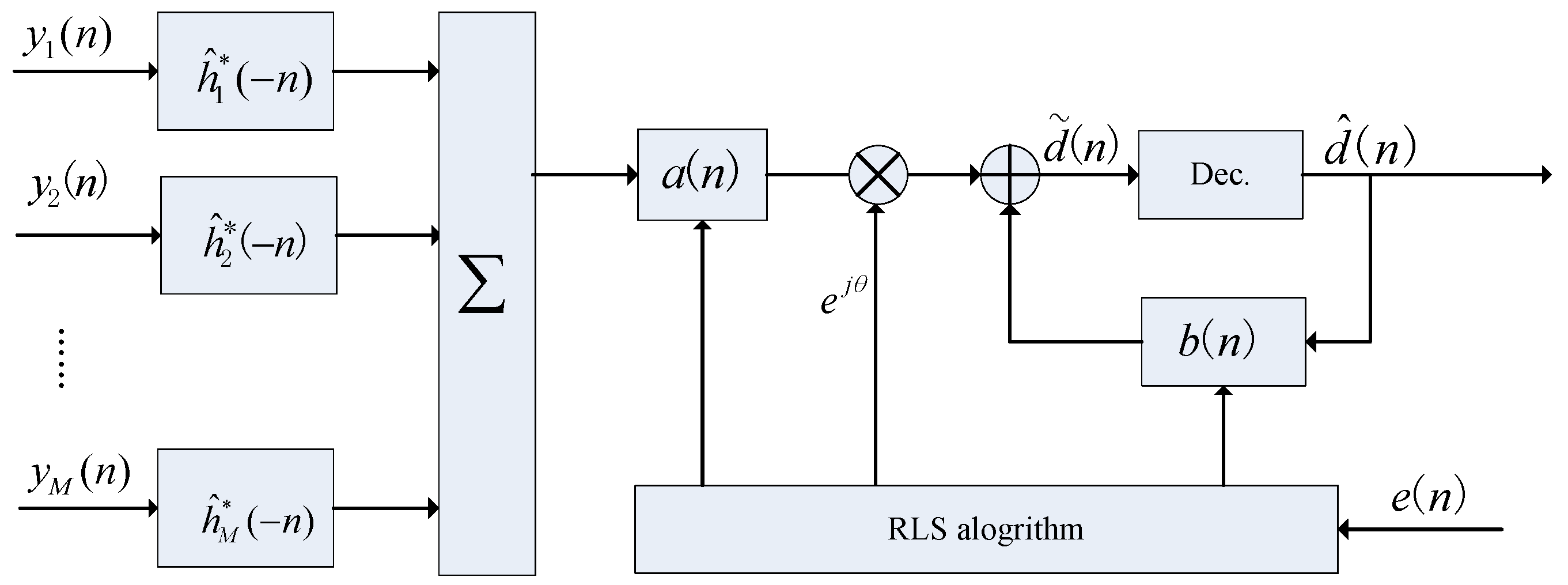
3.2. TR-DFE
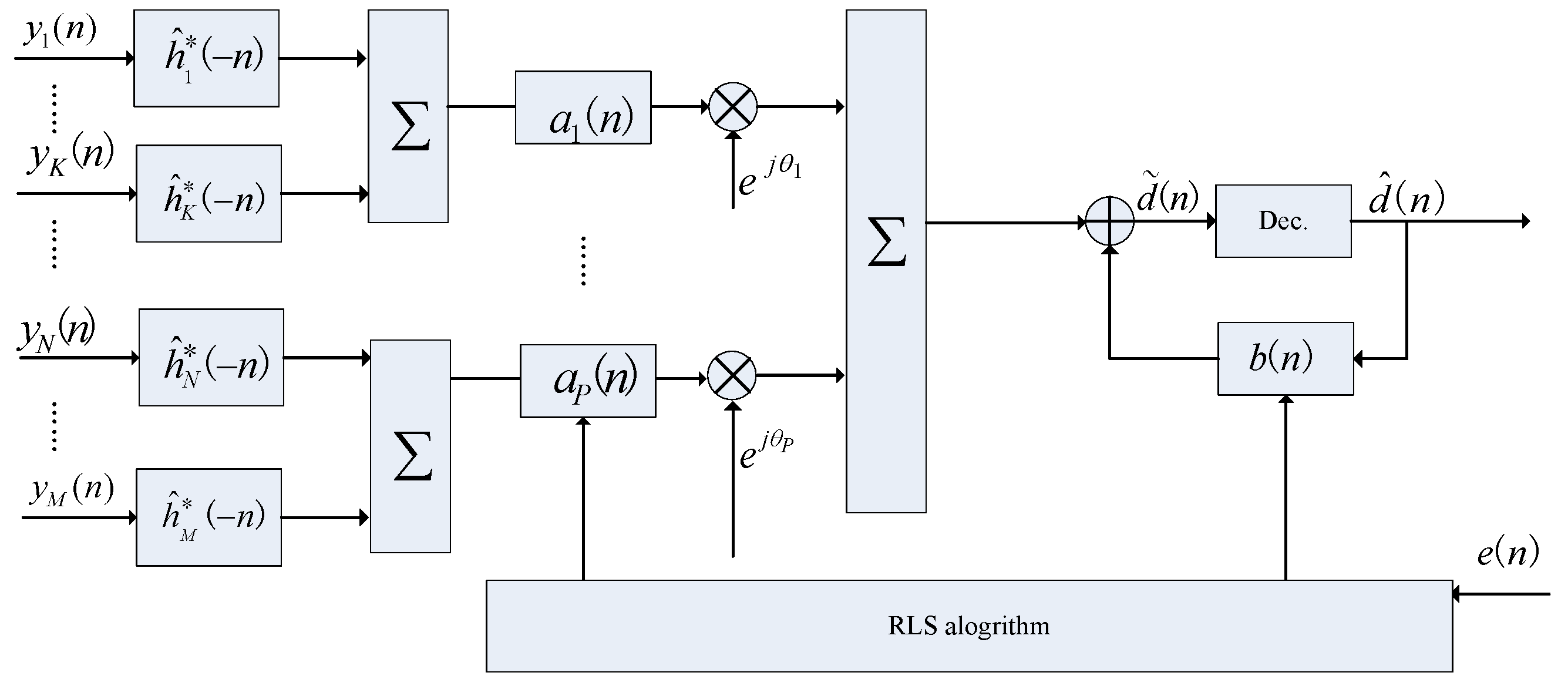
3.3. TR-MC-DFE
3.4. Channel Estimation
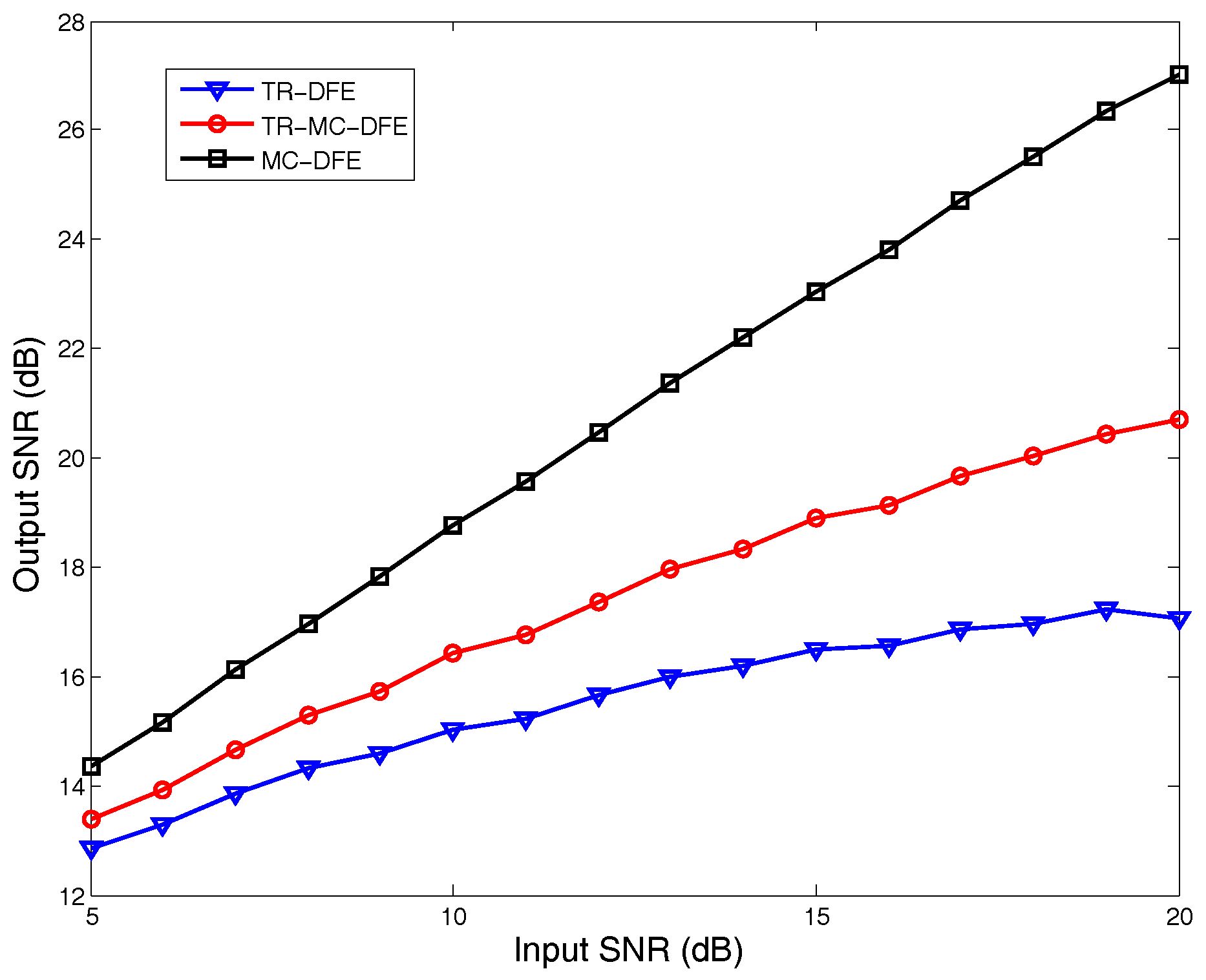
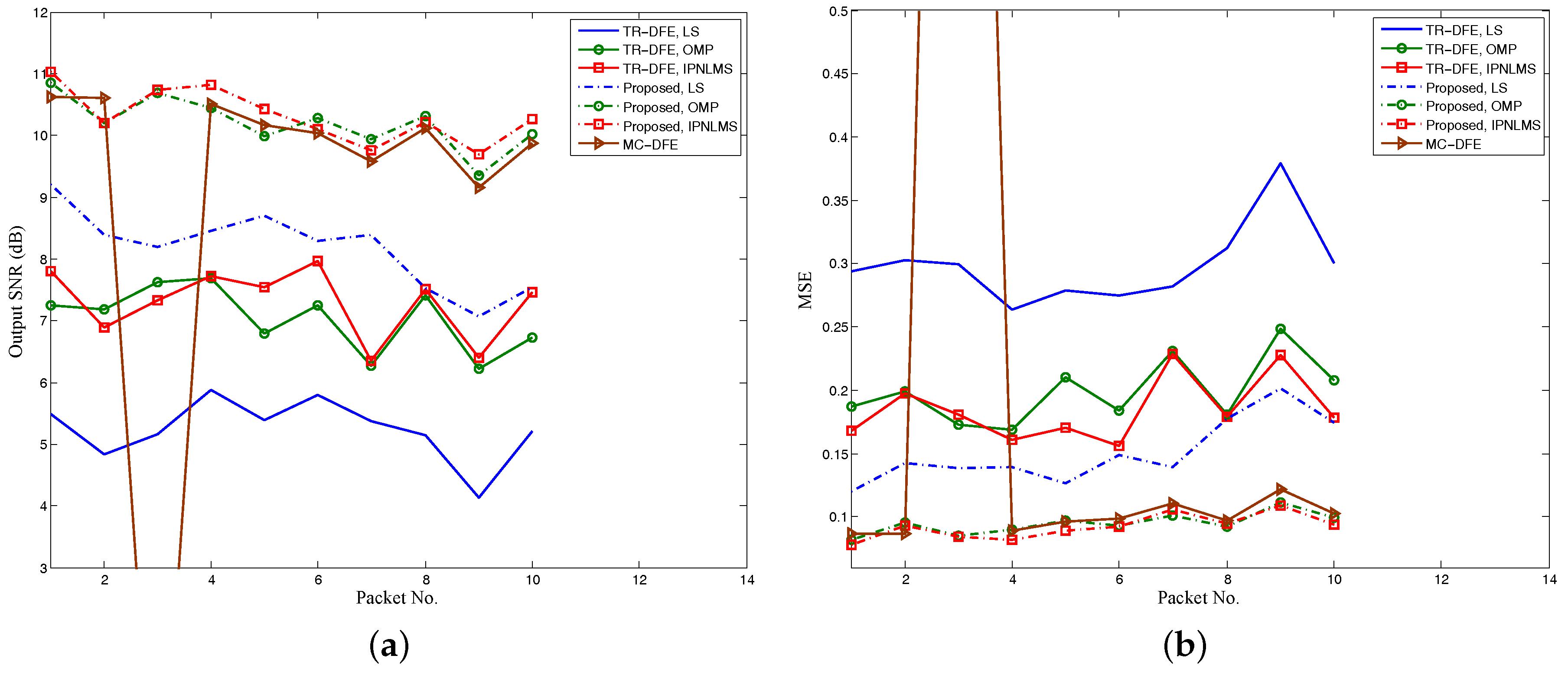
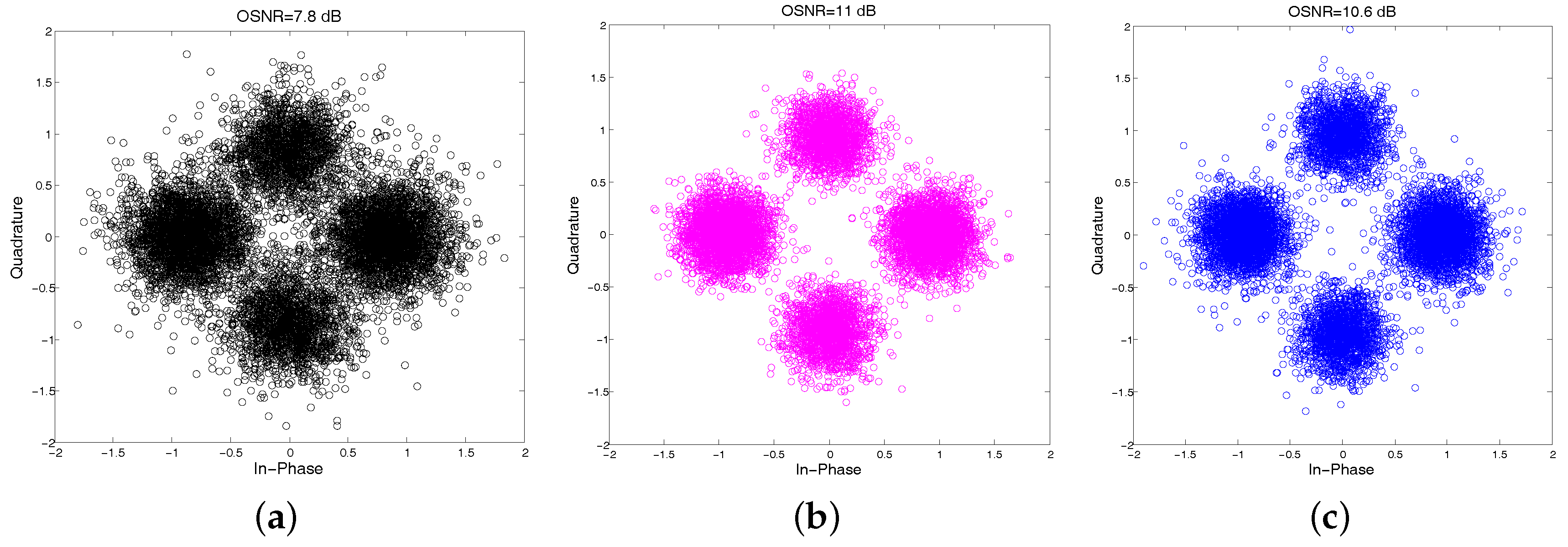
4. Simulation Results
5. Lake Experiment
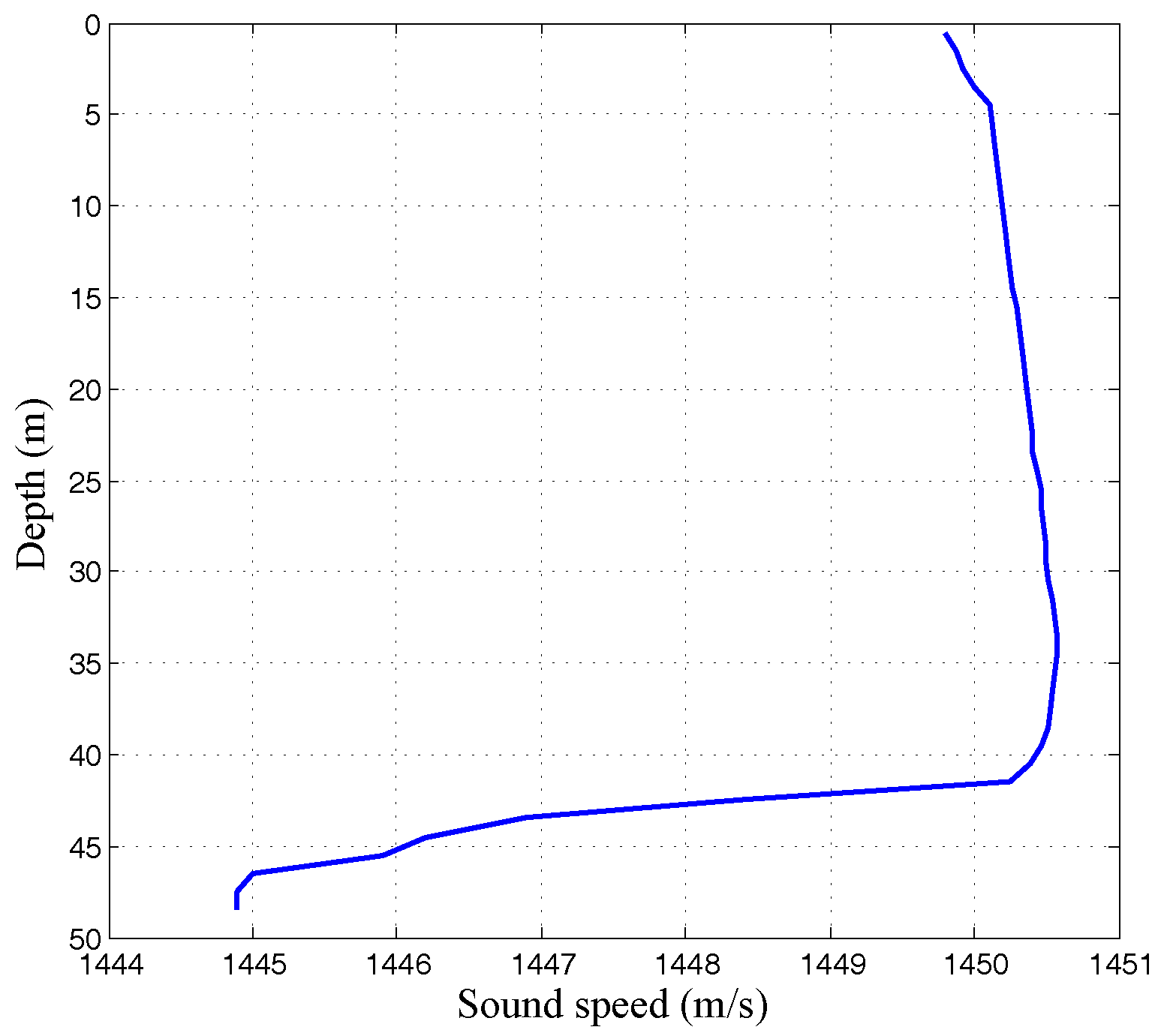
5.1. Experiment Setup
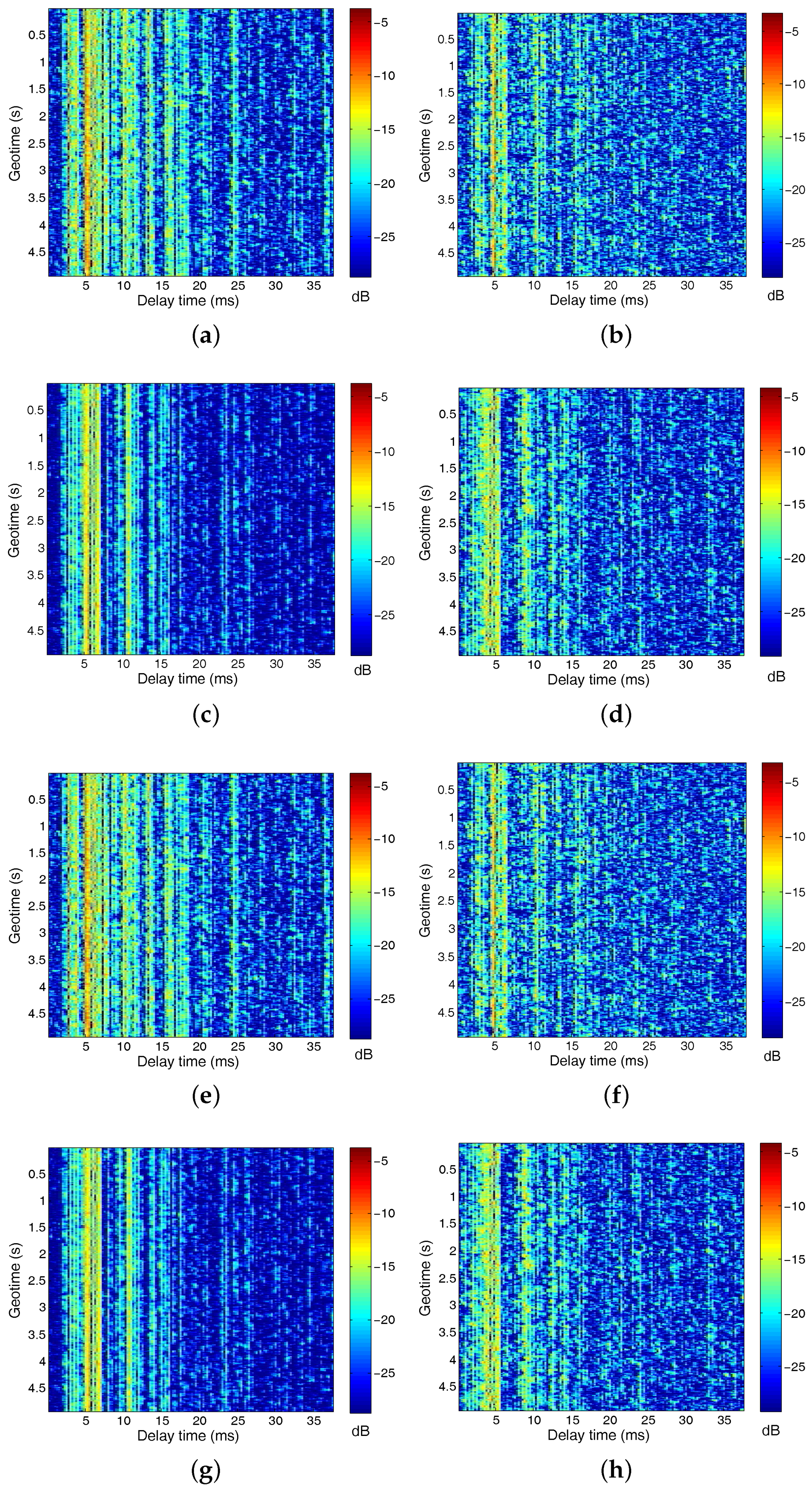
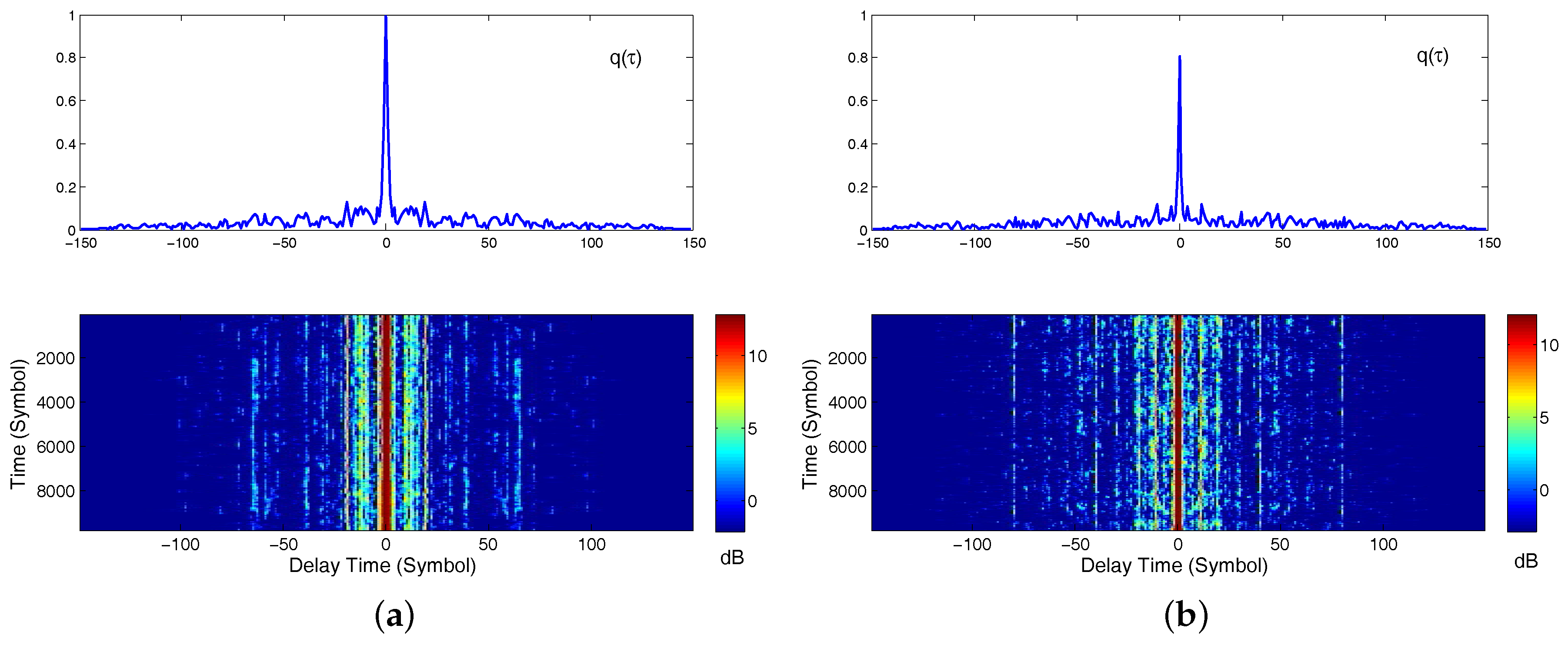
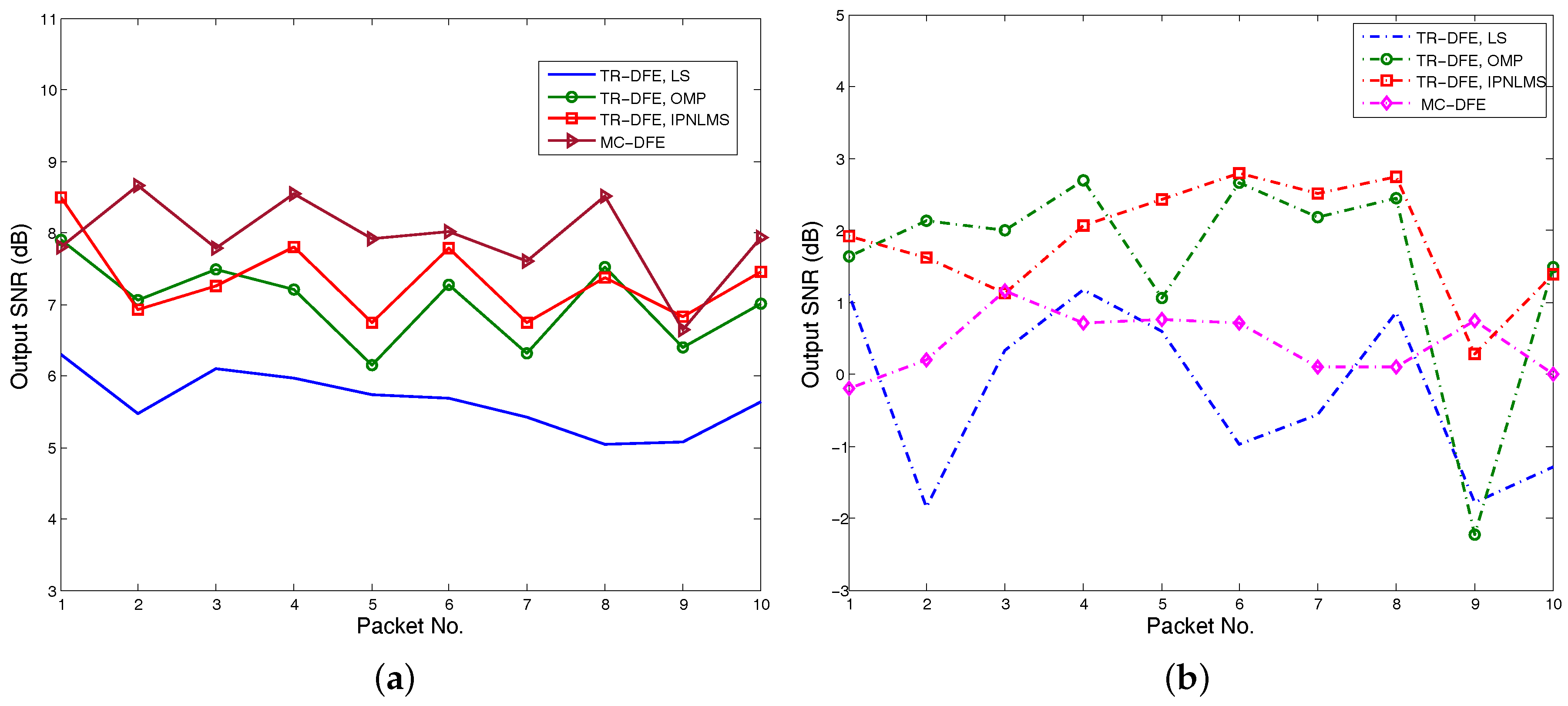
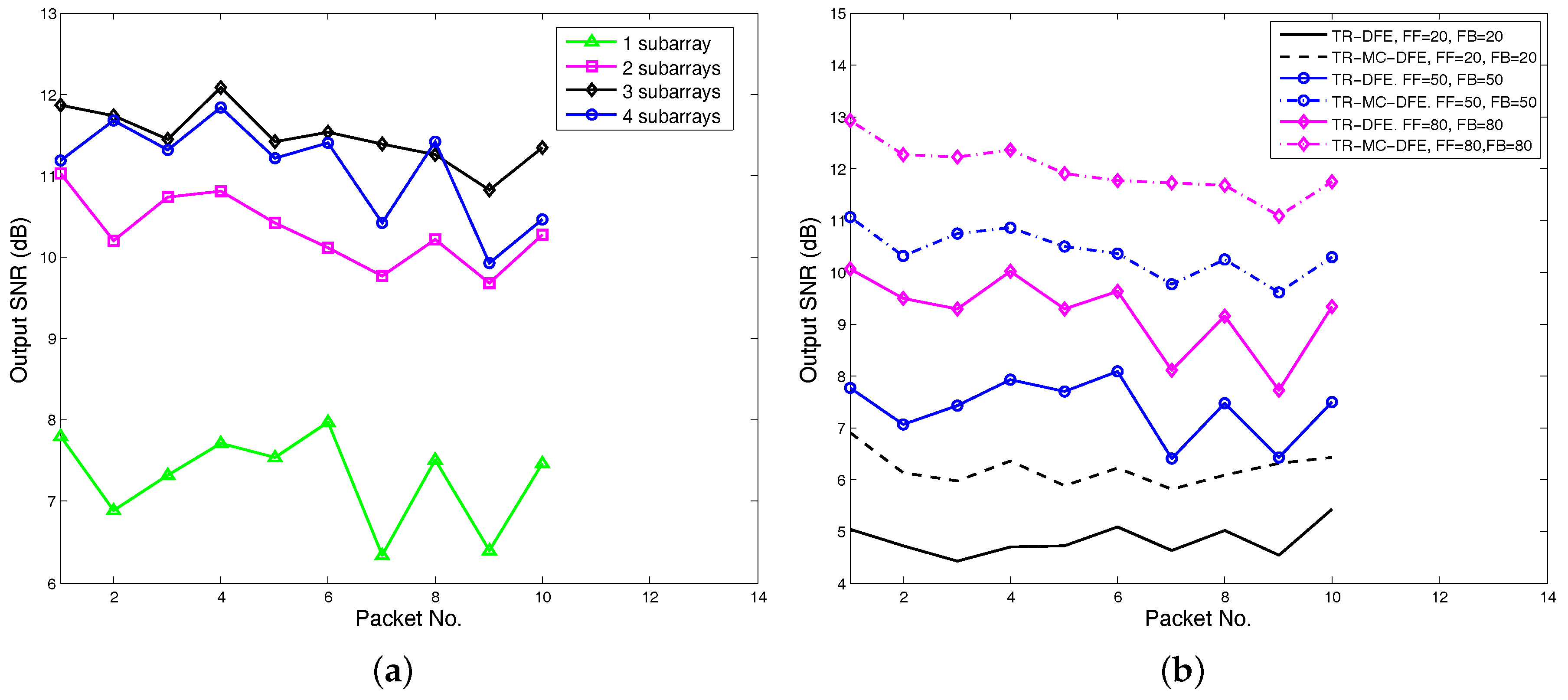
5.2. Results
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Stojanovic, M.; Catipovic, J.A.; Proakis, J.G. Phase-coherent digital communications for underwater acoustic channels. IEEE J. Ocean. Eng. 1993, 19, 100–111. [Google Scholar] [CrossRef]
- Song, H.C. An Overview of Underwater Time-Reversal Communication. IEEE J. Ocean. Eng. 2016, 41, 644–655. [Google Scholar] [CrossRef]
- Yang, T.C. Correlation-based decision-feedback equalizer for underwater acoustic communications. IEEE J. Ocean. Eng. 2005, 30, 865–880. [Google Scholar] [CrossRef]
- Pajovic, M.; Preisig, J.C. Performance Analysis and Optimal Design of Multichannel Equalizer for Underwater Acoustic Communications. IEEE J. Ocean. Eng. 2015, 40, 759–774. [Google Scholar] [CrossRef]
- Stojanovic, M.; Catipovic, J.A.; Proakis, J.G. Reduced complexity spatial and temporal processing of underwater acoustic communication signals. J. Acoust. Soc. Am. 1995, 98, 961–972. [Google Scholar] [CrossRef]
- Yang, T.C. A Study of Spatial Processing Gain in Underwater Acoustic Communications. IEEE J. Ocean. Eng. 2007, 32, 689–709. [Google Scholar] [CrossRef]
- Preisig, J. Challenges and analysis of adaptive multichannel equalization for large-N arrays. In Proceedings of the 49th Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 8–11 November 2015; pp. 239–243. [Google Scholar]
- He, C.; Huo, S.; Wang, H.; Zhang, Q.; Huang, J. Single carrier with multi-channel time-frequency domain equalization for underwater acoustic communications. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing, Brisbane, Australia, 19–24 April 2015; pp. 3009–3013. [Google Scholar]
- Song, H.; Hodgkiss, W.; Kuperman, W.; Higley, W.; Raghukumar, K.; Akal, T.; Stevenson, M. Spatial diversity in passive time reversal communications. J. Acoust. Soc. Am. 2006, 120, 2067–2076. [Google Scholar] [CrossRef]
- Gomes, J.; Silva, A.; Jesus, S. Adaptive spatial combining for passive time-reversed communications. J. Acoust. Soc. Am. 2008, 124, 1038–1053. [Google Scholar] [CrossRef] [PubMed]
- Yang, T.C. Spatially Multiplexed CDMA Multiuser Underwater Acoustic Communications. IEEE J. Ocean. Eng. 2016, 41, 217–231. [Google Scholar]
- Song, H.C. Bidirectional equalization for underwater acoustic communication. J. Acoust. Soc. Am. 2012, 131, EL342–EL347. [Google Scholar] [CrossRef] [PubMed]
- Zhang, G.S.; Hovem, J.; Dong, H. Experimental Assessment of Different Receiver Structures for Underwater Acoustic Communications over Multipath Channels. Sensors 2012, 12, 2118–2135. [Google Scholar] [CrossRef] [PubMed]
- Sun, L.; Chen, B.; Li, H.; Zhou, T.; Li, R. Time reversal acoustic communication using filted multitone modulation. Sensors 2015, 15, 23554–23571. [Google Scholar] [CrossRef] [PubMed]
- Song, A.; Badiey, M.; McDonald, V.K.; Yang, T.C. Time Reversal Receivers for High Data Rate Acoustic Multiple-Input Multiple-Output Communication. IEEE J. Ocean. Eng. 2011, 36, 525–538. [Google Scholar] [CrossRef]
- Li, W.; Preisig, C. Estimation of rapidly time-varying sparse channels. IEEE J. Ocean. Eng. 2007, 32, 927–939. [Google Scholar] [CrossRef]
- Cotter, S.F.; Rao, B.D. Sparse channel estimation via matching pursuit with application to equalization. IEEE Trans. Commun. 2002, 50, 374–377. [Google Scholar] [CrossRef]
- Stojanovic, M. Efficient processing of acoustic signals for high-rate information transmission over sparse underwater channels. Phys. Commun. 2008, 1, 146–161. [Google Scholar] [CrossRef]
- Berger, C.R.; Wang, Z.; Huang, J.; Zhou, S. Application of compressive sensing to sparse channel estimation. IEEE Commun. Mag. 2010, 48, 164–174. [Google Scholar] [CrossRef]
- Byun, S.H.; Seong, W.; Kim, S.M. Sparse Underwater Acoustic Channel Parameter Estimation Using a Wideband Receiver Array. IEEE J. Ocean. Eng. 2013, 38, 718–729. [Google Scholar] [CrossRef]
- Meng, Q.; Huang, J.; Han, J.; He, C.; Ma, C. An improved direct adaptive multichannel turbo equalization scheme for underwater communications. In Proceedings of the Oceans, 2012—Yeosu, Yeosu, Korea, 21–24 May 2012; pp. 1–5. [Google Scholar]
- Sharif, B.S.; Neasham, J.; Hinton, O.R.; Adams, A.E. A computationally efficient Doppler compensation system for underwater acoustic communications. IEEE J. Ocean. Eng. 2000, 25, 52–61. [Google Scholar] [CrossRef]
- Pelekanakis, K.; Chitre, M. Robust Equalization of Mobile Underwater Acoustic Channels. IEEE J. Ocean. Eng. 2015, 40, 775–784. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Description | Values |
|---|---|---|
| Symbol duration | 0.25 ms | |
| M | Total sensor numbers | 8 |
| K | Oversampling rate | 2 |
| The training symbol length | 500 | |
| Feedforward filter order | 50 | |
| Backward filter order | 50 | |
| Proportional tracking constants in PLL | 0.005 | |
| Intergral tracking constants in PLL | 0.005 | |
| RLS forgetting factor in DFE | 0.999 |
| Packet Nos. | TR-DFE | TR-MC-DFE | ||||
|---|---|---|---|---|---|---|
| LS | OMP | IPNLMS | LS | OMP | IPNLMS | |
| 1 | 0.054 | 0.0206 | 0.0135 | 0.0043 | 0.0007 | 0.0003 |
| 2 | 0.074 | 0.0194 | 0.0256 | 0.0085 | 0.0016 | 0.0025 |
| 3 | 0.064 | 0.0169 | 0.0192 | 0.011 | 0.0006 | 0.0006 |
| 4 | 0.044 | 0.0145 | 0.0161 | 0.0078 | 0.0011 | 0.0007 |
| 5 | 0.059 | 0.0246 | 0.0165 | 0.0076 | 0.0024 | 0.0012 |
| 6 | 0.046 | 0.0204 | 0.0127 | 0.0088 | 0.0010 | 0.0022 |
| 7 | 0.058 | 0.0393 | 0.0357 | 0.0085 | 0.0016 | 0.0026 |
| 8 | 0.063 | 0.0171 | 0.0179 | 0.0163 | 0.0013 | 0.0012 |
| 9 | 0.097 | 0.0354 | 0.0331 | 0.024 | 0.0045 | 0.0027 |
| 10 | 0.062 | 0.029 | 0.0182 | 0.0168 | 0.0016 | 0.0012 |
| Average | 0.062 | 0.0237 | 0.0209 | 0.0113 | 0.0016 | 0.0015 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, C.; Jing, L.; Xi, R.; Li, Q.; Zhang, Q. Improving Passive Time Reversal Underwater Acoustic Communications Using Subarray Processing. Sensors 2017, 17, 937. https://doi.org/10.3390/s17040937
He C, Jing L, Xi R, Li Q, Zhang Q. Improving Passive Time Reversal Underwater Acoustic Communications Using Subarray Processing. Sensors. 2017; 17(4):937. https://doi.org/10.3390/s17040937
Chicago/Turabian StyleHe, Chengbing, Lianyou Jing, Rui Xi, Qinyuan Li, and Qunfei Zhang. 2017. "Improving Passive Time Reversal Underwater Acoustic Communications Using Subarray Processing" Sensors 17, no. 4: 937. https://doi.org/10.3390/s17040937
APA StyleHe, C., Jing, L., Xi, R., Li, Q., & Zhang, Q. (2017). Improving Passive Time Reversal Underwater Acoustic Communications Using Subarray Processing. Sensors, 17(4), 937. https://doi.org/10.3390/s17040937