
An Artificial Measurements-Based Adaptive Filter for Energy-Efficient Target Tracking via Underwater Wireless Sensor Networks


Abstract
:1. Introduction
2. Related Work
3. Problem Formulation
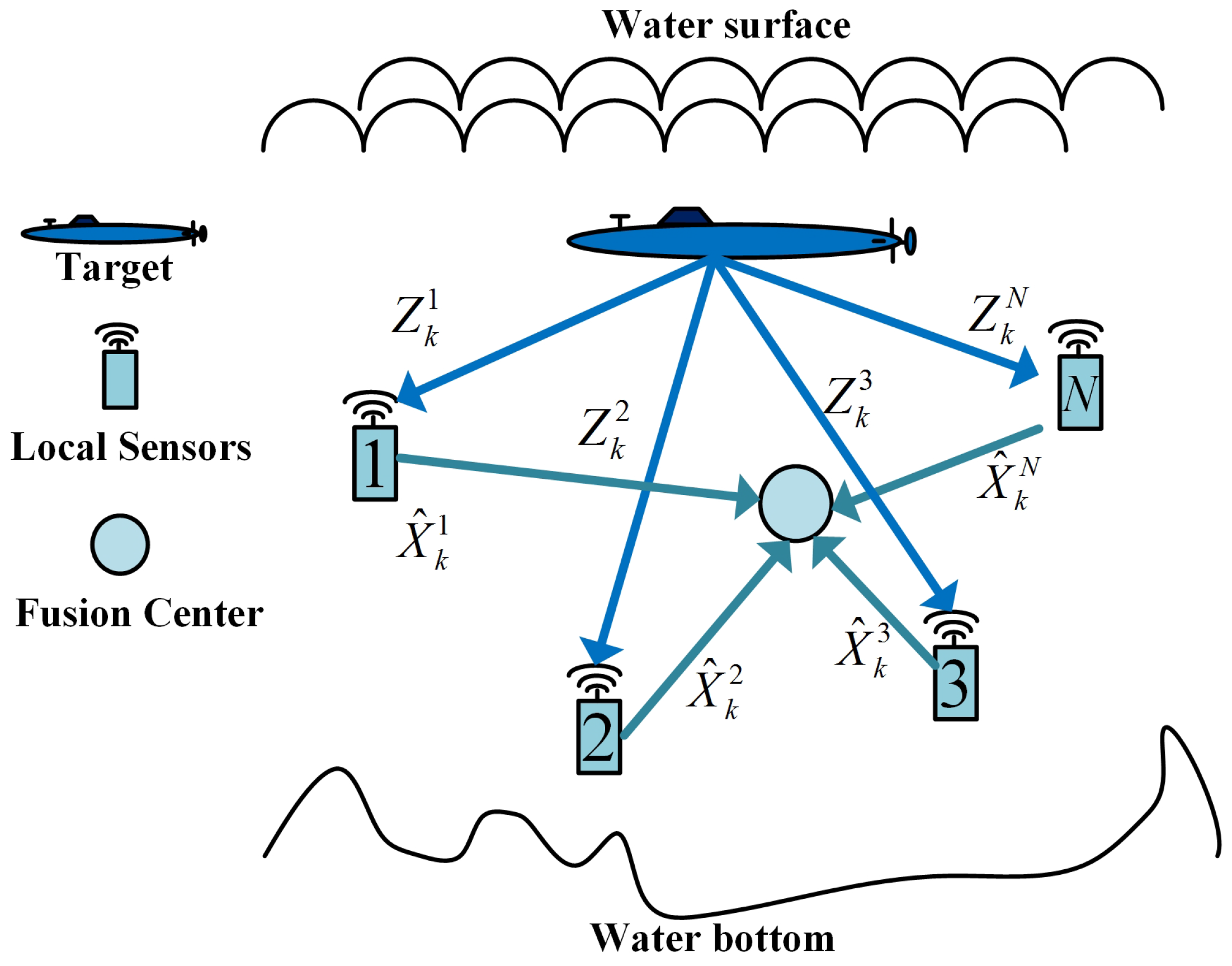
3.1. System Model
3.2. Distributed Fusion Architectures
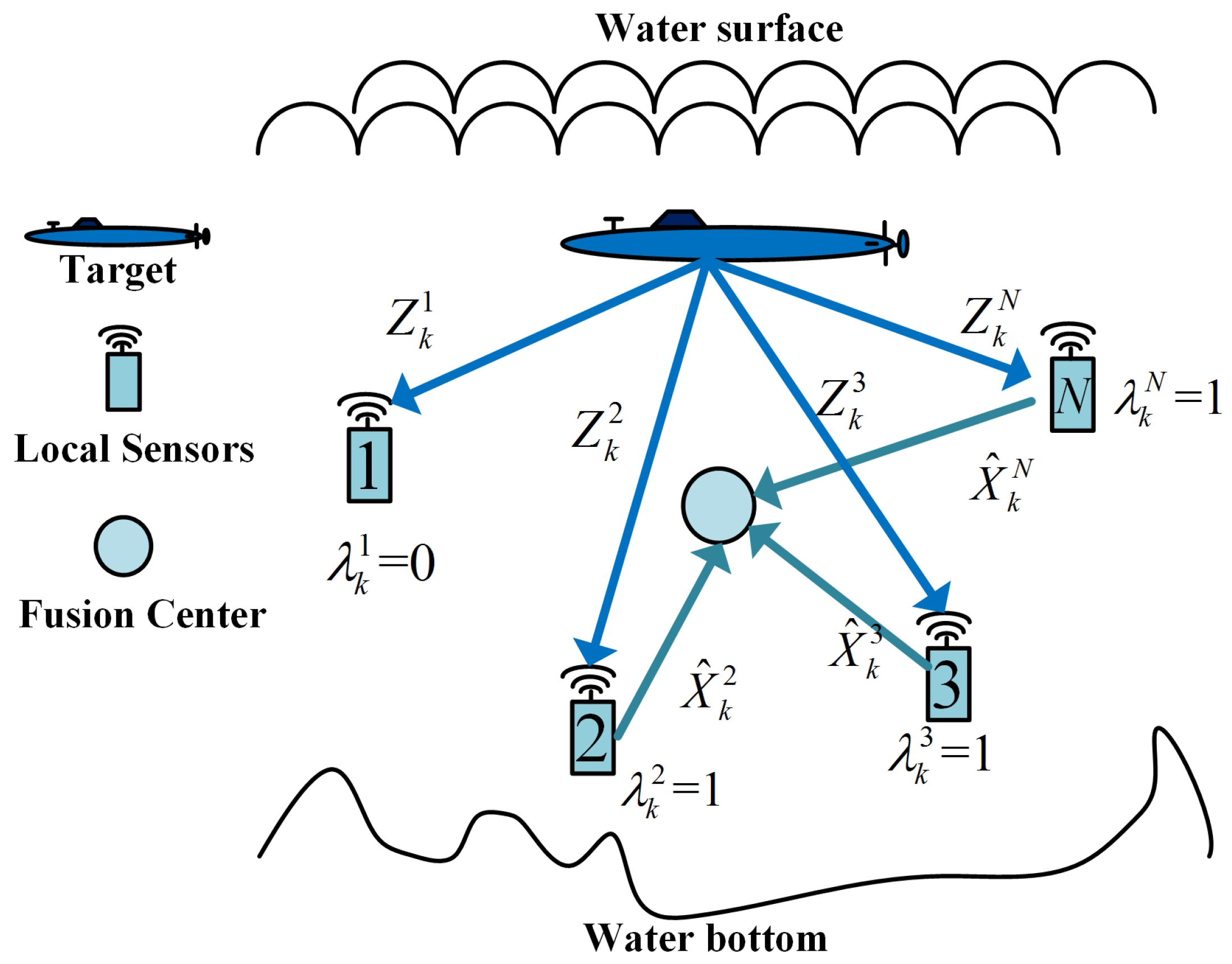
3.3. Measurement Residual-Based Sensor Scheduling
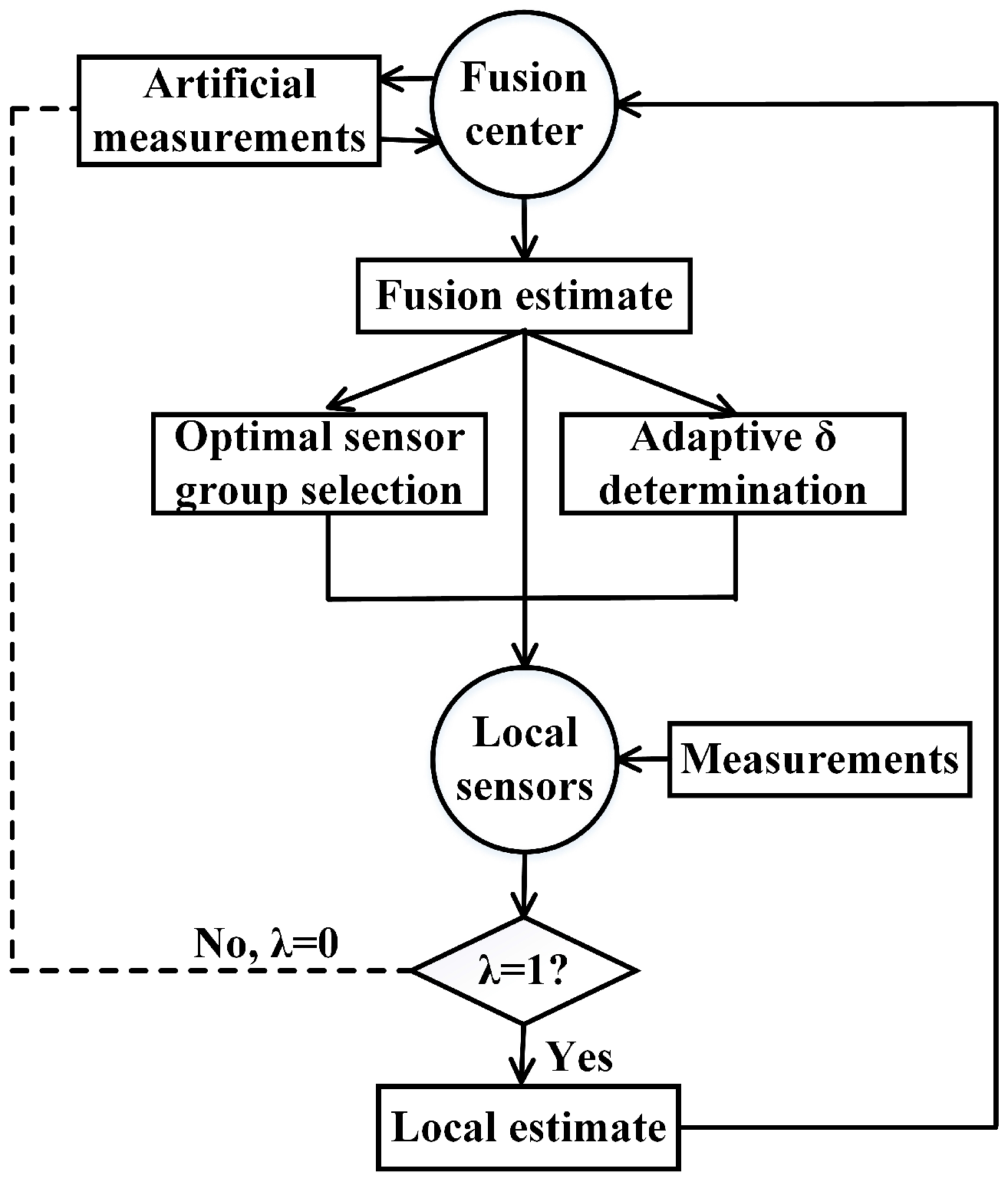
4. Artificial Measurement Based Adaptive Filter
4.1. Artificial Measurement Model
4.2. Artificial Measurement Based Filter
4.3. Adaptive Determination
4.4. Optimal Sensor Group Selection
5. Simulation and Results
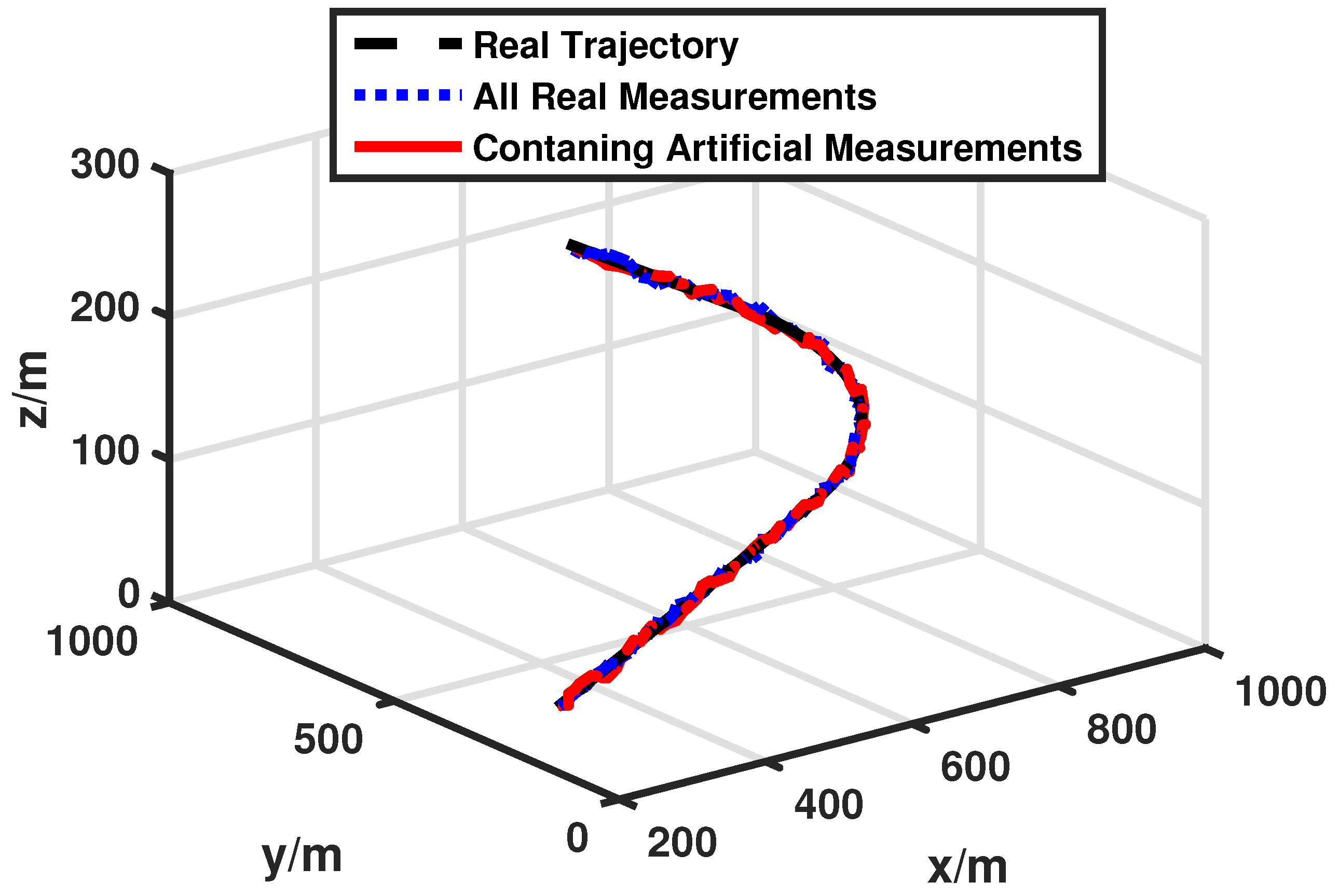
5.1. Simulation Scenario
5.2. Performance Verification
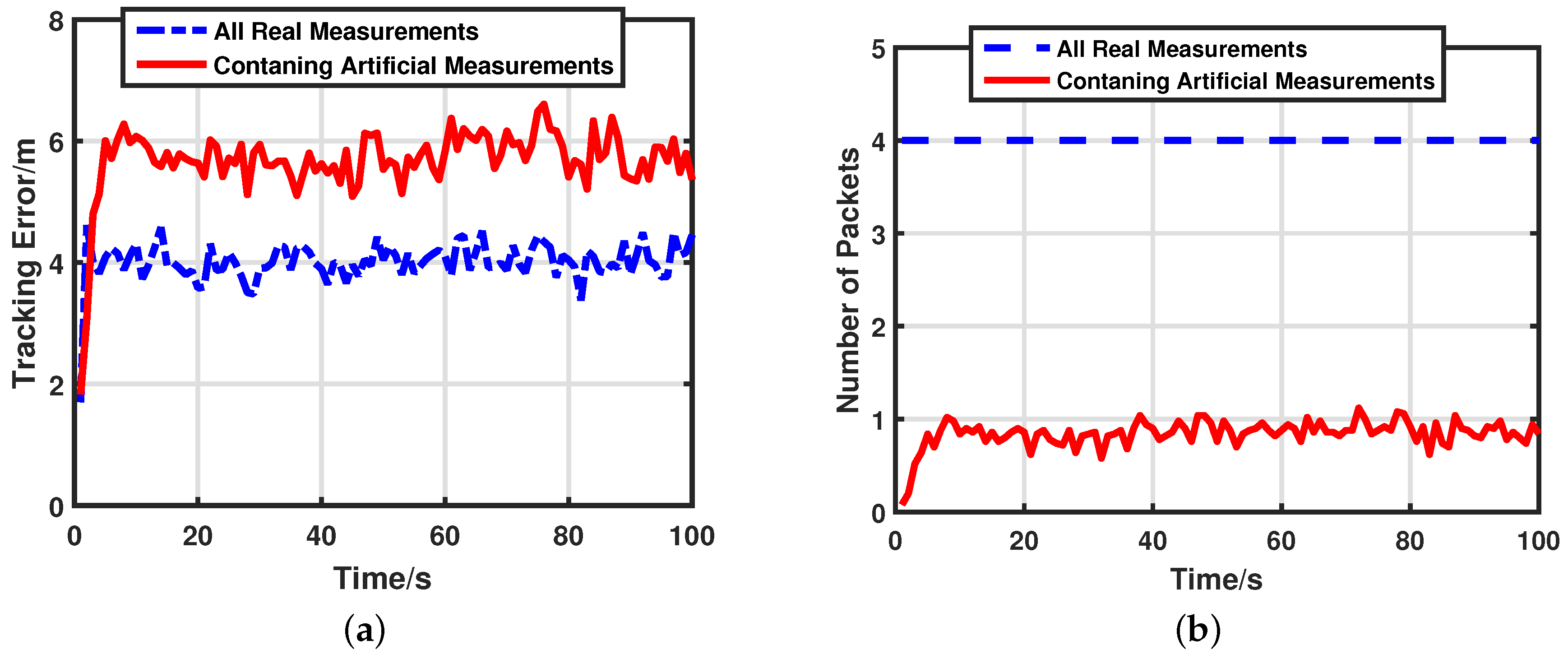
5.2.1. Performance Comparison
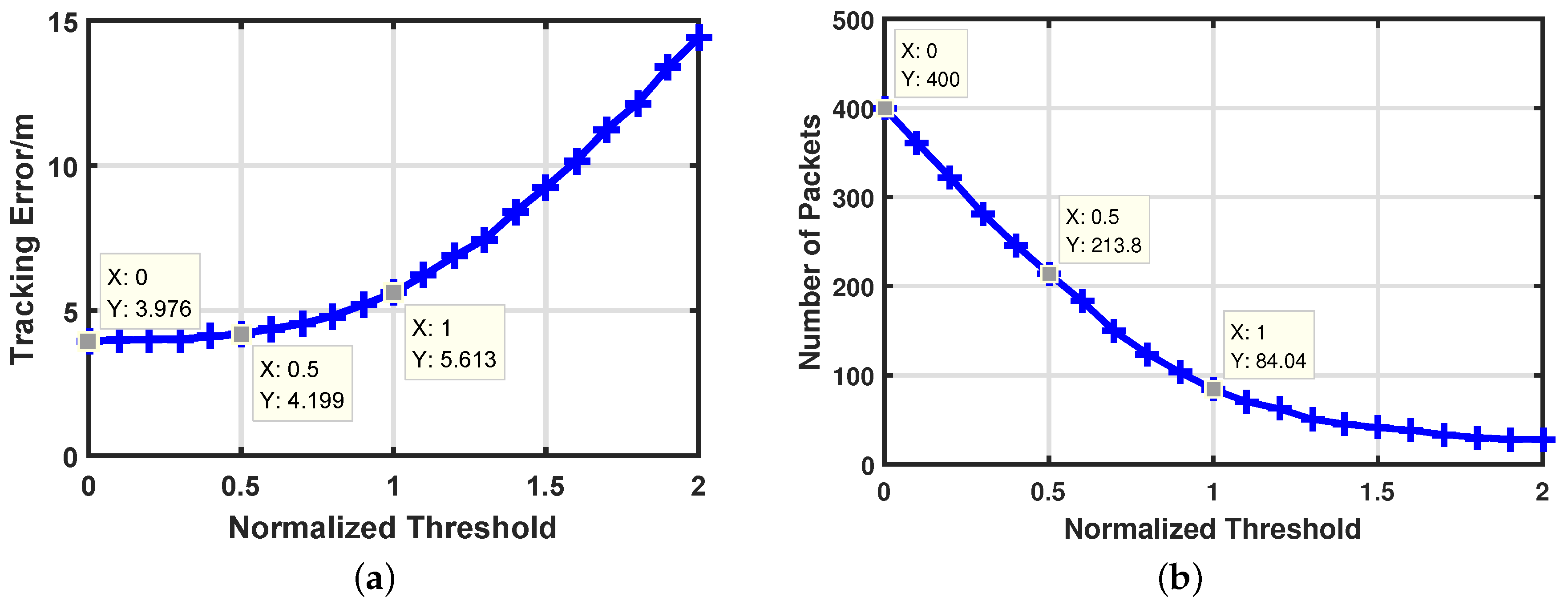
5.2.2. Impacts of
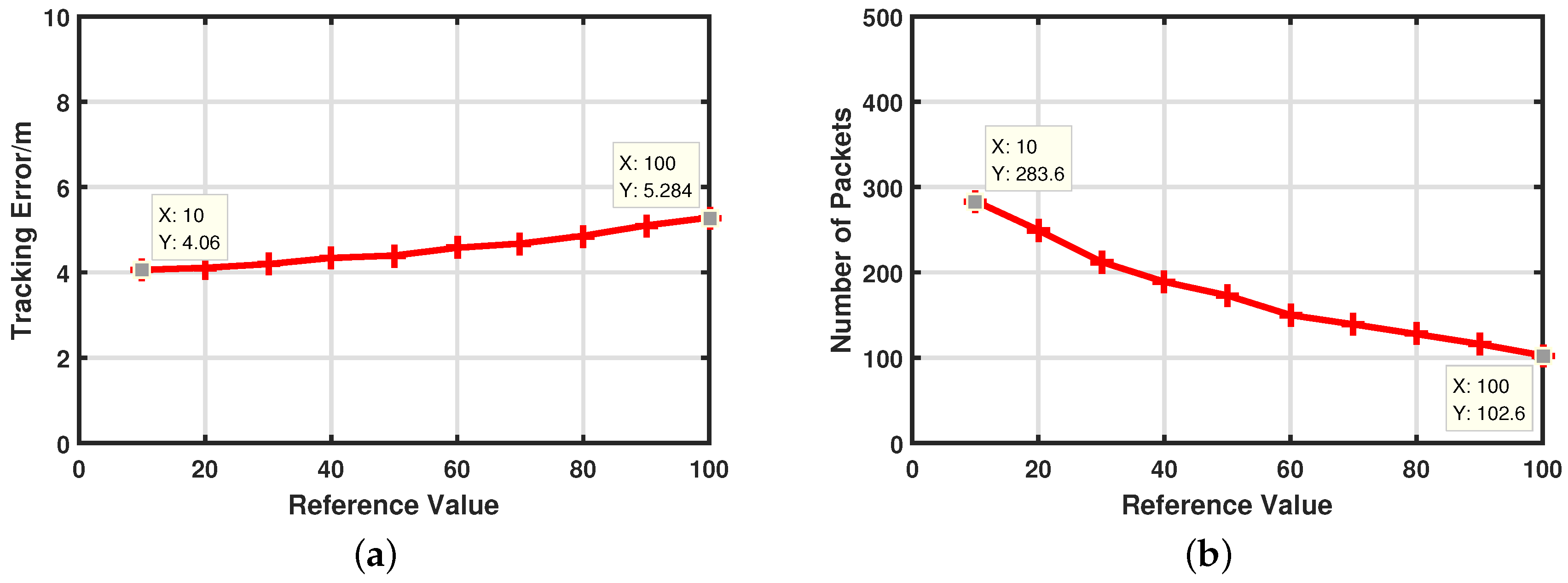
5.2.3. Performance of Adaptive Filter
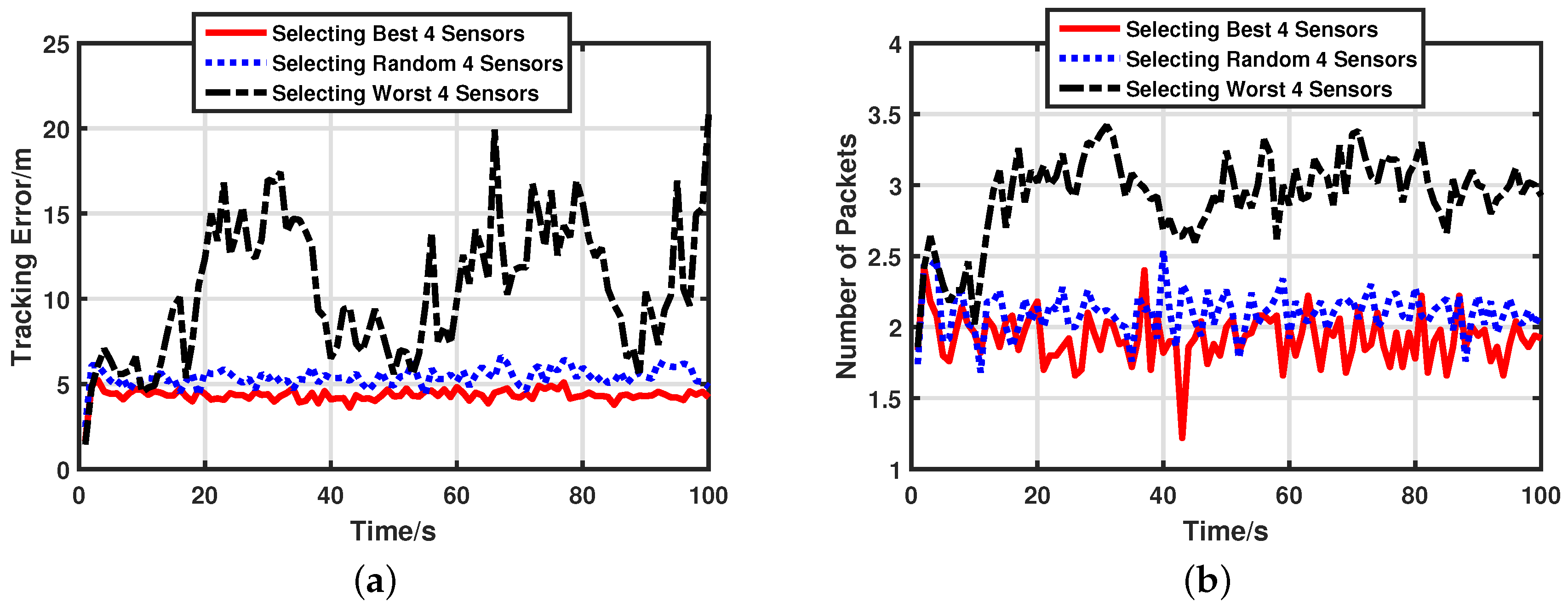
5.2.4. Performance of Sensor Group Selection
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Jaime, L. Underwater sensor nodes and networks. Sensors 2013, 13, 11782–11796. [Google Scholar]
- Climent, S.; Capella, J.V.; Meratnia, N.; Serrano, J.J. Underwater sensor networks: A new energy efficient and robust architecture. Sensors 2012, 12, 704–731. [Google Scholar] [CrossRef] [PubMed]
- Cui, J.H.; Kong, J.J.; Zhou, S.L. The challenges of building scalable mobile underwater wireless sensor networks for aquatic applications. IEEE Netw. 2006, 20, 12–18. [Google Scholar]
- Climent, S.; Sanchez, A.; Capella, J.V.; Meratnia, N.; Serrano, J.J. Underwater acoustic wireless sensor networks: advances and future trends in physical, MAC and routing layers. Sensors 2014, 14, 795–833. [Google Scholar] [CrossRef] [PubMed]
- Souza, E.L.; Nakamura, E.F.; Pazzi, R.W. Target Tracking for Sensor Networks: A Survey. ACM Comput. Surv. (CSUR) 2016, 49, 30. [Google Scholar] [CrossRef]
- Han, G.; Jiang, J.; Zhang, C.; Duong, T.Q.; Guizani, M.; Karagiannidis, G.K. A survey on mobile anchor node assisted localization in wireless sensor networks. IEEE Commun. Surv. Tutor. 2016, 18, 2220–2243. [Google Scholar] [CrossRef]
- Zhou, W.; Shi, W.R.; Zhang, H.D.; Wang, X.G.; Kang, D.J. Study on distributed target tracking in wireless sensor networks. Chin. J. Sci. Instrum. 2013, 34, 1485–1491. [Google Scholar]
- Catipovic, J. Performance limitations in underwater acoustic telemetry. IEEE J. Ocean. Eng. 1990, 15, 205–216. [Google Scholar] [CrossRef]
- Bhardwaj, M.; Chandrakasan, A.P. Bounding the lifetime of sensor networks via optimal role assignments. In Proceedings of the IEEE INFOCOM, New York, NY, USA, 23–27 June 2002; pp. 1587–1596. [Google Scholar]
- Li, L.; Lemmon, M.; Wang, X. Event-triggered state estimation in vector linear processes. In Proceedings of the American Control Conference, Baltimore, MD, USA, 30 June–2 July 2010; pp. 2138–2143. [Google Scholar]
- Wu, J.; Jia, Q.S.; Johansson, K.H.; Shi, L. Event-based sensor data scheduling: Trade-off between communication rate and estimation quality. IEEE Trans. Autom. Control 2013, 58, 1041–1046. [Google Scholar] [CrossRef]
- Wu, J.; Li, Y.; Quevedo, D.E.; Lau, V.; Shi, L. Data-driven power control for state estimation: A bayesian inference approach. Automatica 2015, 54, 332–339. [Google Scholar] [CrossRef]
- Shi, D.; Chen, T.; Shi, L. On set-valued Kalman filtering and its application to event-based state estimation. IEEE Trans. Autom. Control 2015, 60, 1275–1290. [Google Scholar] [CrossRef]
- Zhang, S.; Chen, H.; Liu, M.; Zhang, Q. Artificial measurements based filter for energy-efficient target tracking in underwater wireless sensor networks. In Proceedings of the 2016 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Hong Kong, China, 5–8 August 2016; pp. 1–6. [Google Scholar]
- Isbitiiren, G.; Akan, O.B. Three-dimensional underwater target tracking with acoustic sensor networks. IEEE Trans. Veh. Technol. 2011, 60, 3897–3906. [Google Scholar] [CrossRef]
- Wang, X.; Xu, M.; Wang, H. Combination of interacting multiple models with the particle filter for three-dimensional target tracking in underwater wireless sensor networks. Math. Probl. Eng. 2012, 2012, 829451. [Google Scholar] [CrossRef]
- Yu, C.H.; Lee, J.C.; Choi, J.W.; Park, M.K.; Kang, D.J. Energy efficient distributed interacting multiple model filter in UWSNs. In Proceedings of the International Conference on Control, Automation and Systems, JeJu Island, Korea, 17–21 October 2012; pp. 1093–1098. [Google Scholar]
- Zhang, S.; Chen, H.; Liu, M. Adaptive sensor scheduling for target tracking in underwater wireless sensor networks. In Proceedings of the 2014 IEEE International Conference on Mechatronics and Control (ICMC), Jinzhou, China, 3–5 July 2014; pp. 55–60. [Google Scholar]
- Zhang, Q.; Liu, M.; Zhang, S. Node Topology Effect on Target Tracking Based on UWSNs Using Quantized Measurements. IEEE Trans. Cybern. 2015, 45, 2323–2335. [Google Scholar] [CrossRef] [PubMed]
- Zhu, Y.M.; You, Z.S.; Zhao, J.; Zhang, K.S.; Li, X.R. The optimality for the distributed Kalman filtering fusion with feedback. Automatica 2001, 37, 1489–1493. [Google Scholar] [CrossRef]
- Zhang, Q.; Liu, M.; Zhang, S.; Chen, H. Node topology effect on target tracking based on underwater wireless sensor networks. In Proceedings of the 2014 IEEE 17th International Conference on Information Fusion (FUSION), Salamanca, Spain, 7–10 July 2014; pp. 1–8. [Google Scholar]
- Riskin, E. Optimal bit allocation via the generalized bfos algorithm. IEEE Trans. Inf. Theory 1991, 37, 400–402. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notations | Explanations |
|---|---|
| Target state at time k | |
| Estimate of target state at time k | |
| Predicted estimate of target state at time k | |
| State transition matrix at time k | |
| Process noise at time | |
| Covariance of process noise at time k | |
| Measurement of sensor i at time k | |
| , , | Measurement noise of sensor i at time k |
| Covariance of measurement noise of sensor i at time k | |
| Predicted measurement at time k | |
| Measurement residual of sensor i at time k | |
| Artificial measurement of sensor i at time k | |
| Measurement function of sensor i at time k | |
| Jacobian matrix of sensor i at time k | |
| Target location at time k | |
| Location of Sensor i | |
| Normalized threshold | |
| Indicator value of sensor i at time k | |
| Estimate error covariance at time k | |
| Predicted estimate error covariance at time k | |
| Distribution of random variable | |
| Expectation of random variable | |
| Covariance of random variable | |
| Probability of random variable | |
| Covariance of measurement residual of sensor i at time k | |
| Covariance of measurement residual of sensor i at time k with artificial measurement | |
| Kalman gain of sensor i at time k | |
| Kalman gain of sensor i at time k with artificial measurement | |
| Trace of | |
| Pre-given reference value |
| Exhaustive Search | 15 | 70 | 210 | 1365 | 4845 |
| GBFOS | 11 | 26 | 45 | 110 | 200 |
| Worst Sensor Group | Random Sensor Group | Best Sensor Group | |
|---|---|---|---|
| Target tracking error | 10.6308 | 5.3976 | 4.3389 |
| Number of packets | 292.65 | 210.34 | 192.16 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, H.; Zhang, S.; Liu, M.; Zhang, Q. An Artificial Measurements-Based Adaptive Filter for Energy-Efficient Target Tracking via Underwater Wireless Sensor Networks . Sensors 2017, 17, 971. https://doi.org/10.3390/s17050971
Chen H, Zhang S, Liu M, Zhang Q. An Artificial Measurements-Based Adaptive Filter for Energy-Efficient Target Tracking via Underwater Wireless Sensor Networks . Sensors. 2017; 17(5):971. https://doi.org/10.3390/s17050971
Chicago/Turabian StyleChen, Huayan, Senlin Zhang, Meiqin Liu, and Qunfei Zhang. 2017. "An Artificial Measurements-Based Adaptive Filter for Energy-Efficient Target Tracking via Underwater Wireless Sensor Networks " Sensors 17, no. 5: 971. https://doi.org/10.3390/s17050971
APA StyleChen, H., Zhang, S., Liu, M., & Zhang, Q. (2017). An Artificial Measurements-Based Adaptive Filter for Energy-Efficient Target Tracking via Underwater Wireless Sensor Networks . Sensors, 17(5), 971. https://doi.org/10.3390/s17050971