
Auxiliary Truncated Unscented Kalman Filtering for Bearings-Only Maneuvering Target Tracking


Abstract
:1. Introduction
2. Proposed Algorithm
2.1. Joint Prior Distribution
2.2. Approximation of
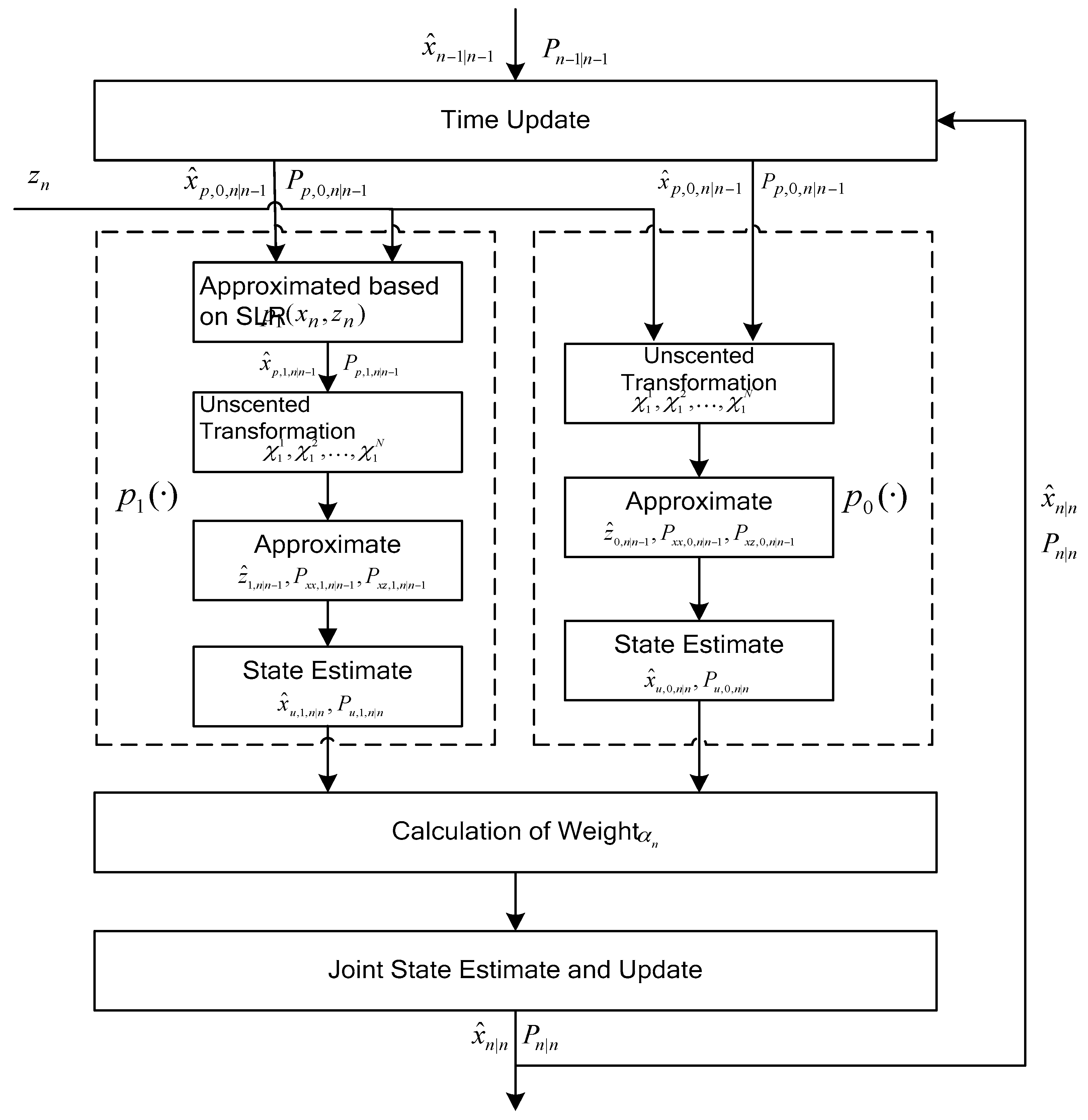
2.3. Summary of the Proposed Algorithm
Algorithm: Auxiliary Truncated Unscented Kalman Filtering (ATUKF)
- Obtain sigma points and the corresponding associated weights using unscented transform (UT ) based on the mean and covariance of the posterior PDF , where denotes the dimension of state . The predicted sigma points can be obtained by the nonlinear state function :
- Approximate the mean and covariance of the state-predicted prior PDF
- Compute the predicted measurement based on the nonlinear measurement function :
- The cross-covariance, innovation covariance and error covariance are estimated as follows:
- Estimate the mean and covariance using (30) and (31):
- Calculation of the mean and covariance of the priorAccording to (14) and (16) in Section 2.2, the linear regression coefficients and can be approximately computed by using Equations (27–29). The mean and covariance of can be approximately estimated by (10) and (11), respectively.
- Draw new sigma points with the associated weights by using the UT based on the mean and covariance . The predicted measurements of new sigma points are estimated as follows:
- Calculation of , and
- Estimate the mean and covariance using (36) and (37):
- Calculate the parameter using (38) and (39)
- Approximate the mean and covariance of the posterior PDF using (23) and (24).
3. Simulation Results
3.1. Univariate Nonstationary Growth Model (UNGM)
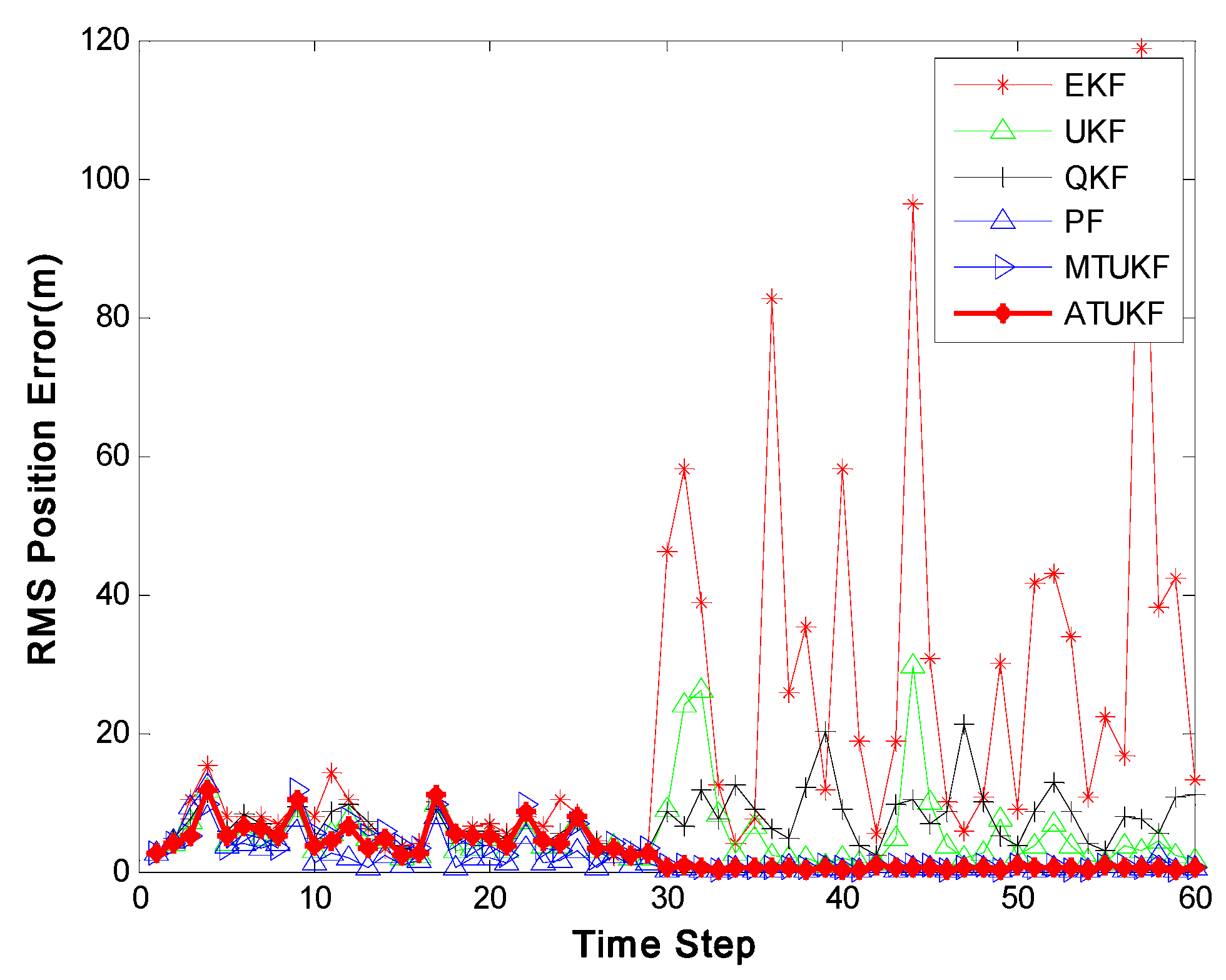
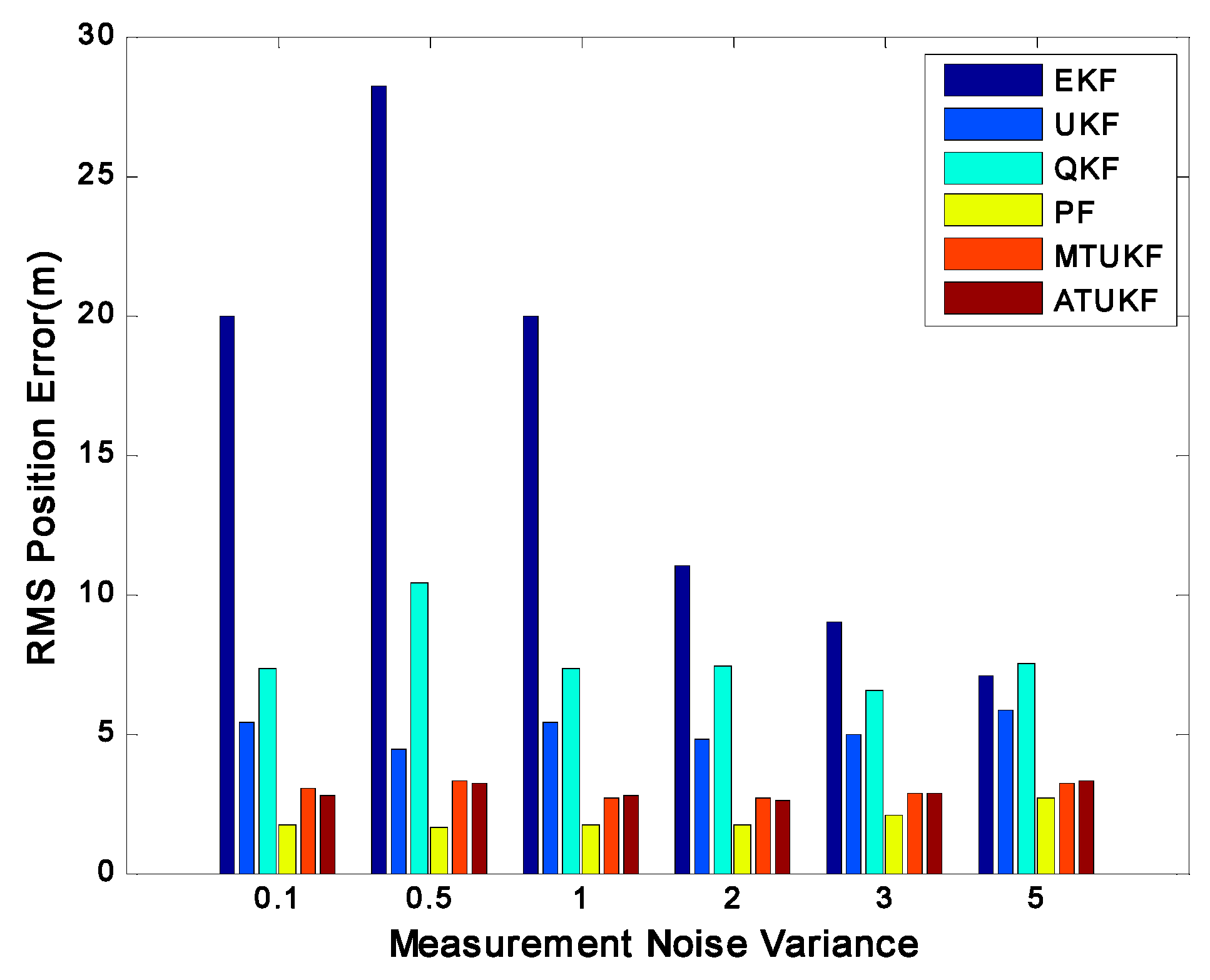
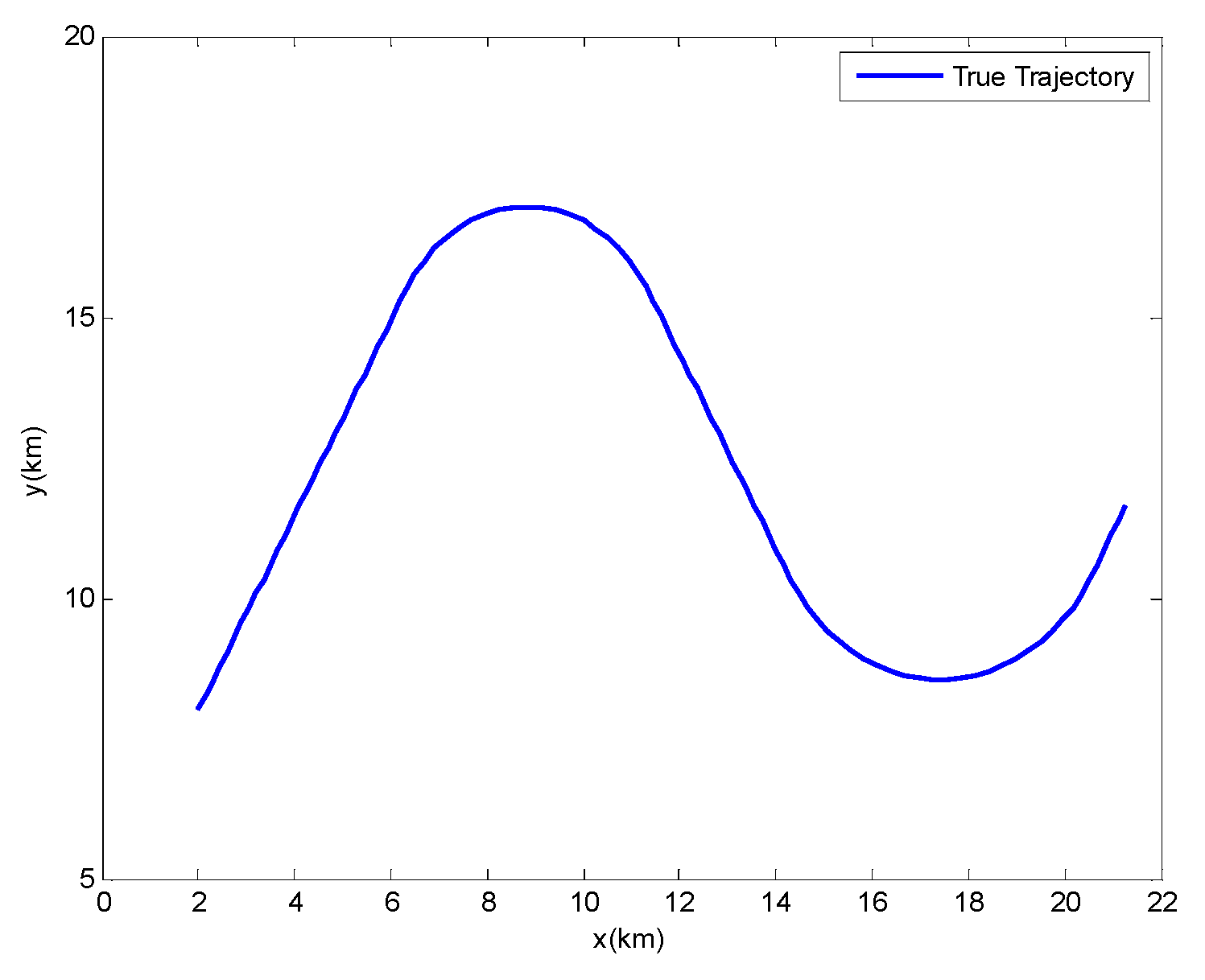
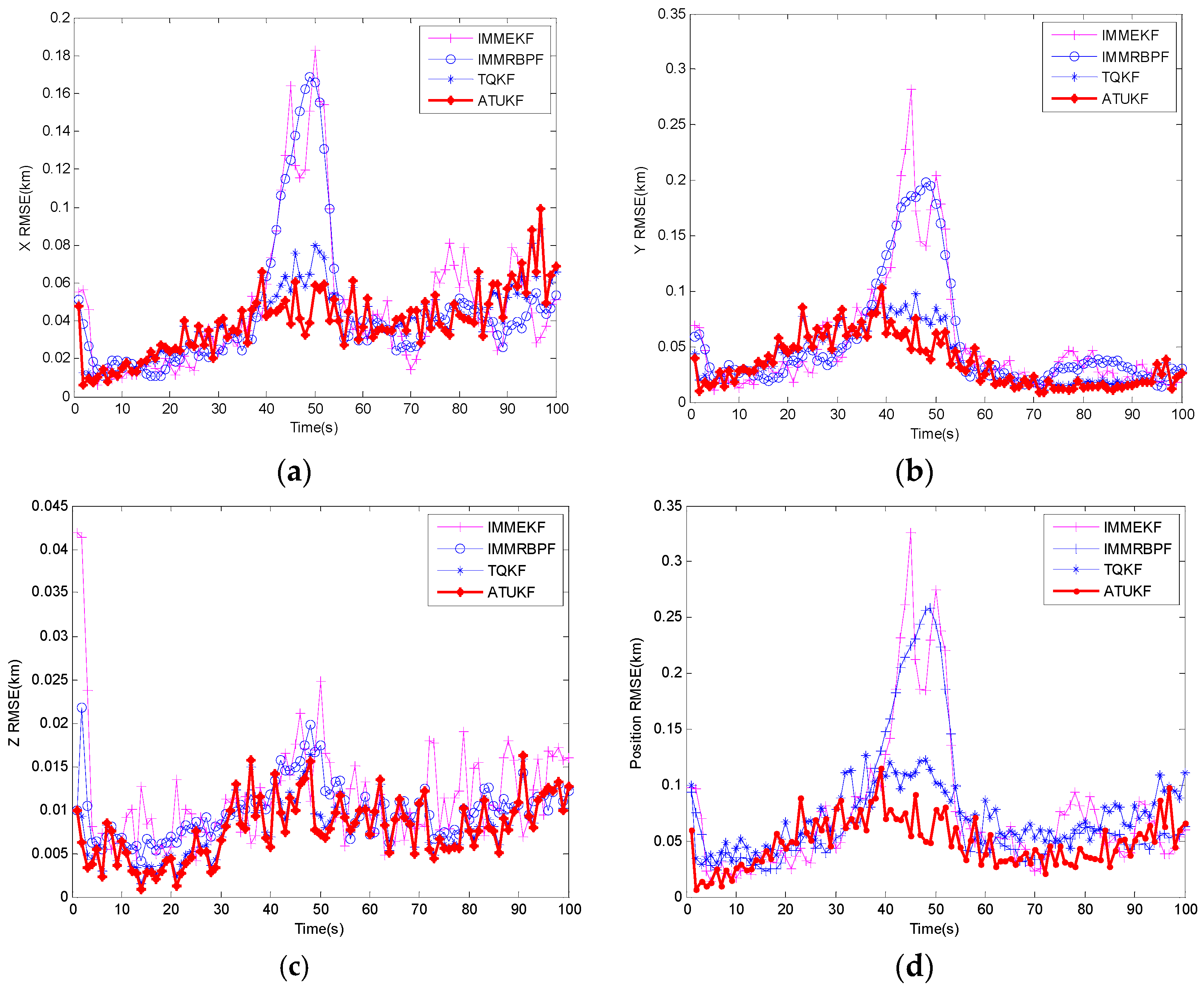
3.2. Bearings-Only Maneuvering Tracking (BOT) Scenario
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Battistini, S.; Shima, T. Differential games missile guidance with bearings-only measurements. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 2906–2915. [Google Scholar] [CrossRef]
- Li, W.L.; Jia, Y.M. An information theoretic approach to interacting multiple model estimation. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 1811–1825. [Google Scholar] [CrossRef]
- Zhang, Q.; Song, T.L. Improved Bearings-Only Multi-Target Tracking with GM-PHD Filtering. Sensors 2016, 16, 1469. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.; Patwari, N. Robust estimators for variance-based device-free localization and tracking. IEEE Trans. Mob. Comput. 2015, 14, 2116–2129. [Google Scholar] [CrossRef]
- Viani, F.; Robol, F.; Polo, A.; Rocca, P.; Oliveri, G.; Massa, A. Wireless architectures for heterogeneous sensing in smart home applications-Concepts and real implementations. Proce. IEEE 2013, 101, 2381–2396. [Google Scholar] [CrossRef]
- Li, L.; Xie, W. A Novel Auxiliary Quadrature Particle Filtering Algorithm Based on Target Characteristic. Acta Electron. Sin. 2014, 42, 2069–2074. (In Chinese) [Google Scholar]
- Blom, H.A.P.; Bar-shalom, Y. The interacting multiple model algorithm for systems with markovian switching coefficients. IEEE Trans. Autom. Control 1988, 33, 780–783. [Google Scholar] [CrossRef]
- Syamantak, D.G.; Yu, J.Y.; Mahendra, M.; Mark, C.; Mark, M. Comparison of Angle-only Filtering Algorithms in 3D Using EKF, UKF, PF, PFF, and Ensemble KF. In Proceedings of the 18th International Conference on Information Fusion Washington, Washington, DC, USA, 6–9 July 2015; pp. 1649–1656. [Google Scholar]
- Gustafsson, F.; Hendeby, G. Some relations between extended and unscented Kalman filters. IEEE Trans. Signal Process. 2012, 60, 545–555. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlmann, J.K. Unscented filtering and nonlinear estimation. Proce. IEEE 2004, 92, 401–422. [Google Scholar] [CrossRef]
- Ángel, F.G.-F.; Mark, R.M.; Jesús, G. Truncated Unscented Kalman Filtering. IEEE Trans. Signal Process. 2012, 60, 3372–3386. [Google Scholar]
- García-Fernández, A.F.; Morelande, M.R.; Grajal, J. Mixture truncated unscented Kalman filtering. In Proceedings of the 15th International Conference on Information Fusion, Singapore, 9–12 July 2012; pp. 479–486. [Google Scholar]
- Straka, O.; Duník, J.; Šimandl, M. Truncation nonlinear filters for state estimation with nonlinear inequality constraints. Automatica 2012, 48, 273–286. [Google Scholar] [CrossRef]
- Boada, B.L.; Garcia-Pozuelo, D.; Boada, M.J.L.; Diaz, V. A Constrained Dual Kalman Filter Based on pdf Truncation for Estimation of Vehicle Parameters and Road Bank Angle: Analysis and Experimental Validation. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1006–1016. [Google Scholar] [CrossRef]
- Gordon, N.J.; Salmond, D.J.; Smith, A.F.M. Novel approach to nonlinear/non-Gaussian Bayesian state estimation. IEEE Proceed. Radar Sonar Navig. 1993, 140, 107–113. [Google Scholar] [CrossRef]
- Sutharsan, S.; Kirubarajan, T.; Lang, T.; McDonald, M. An Optimization-Based Parallel Particle Filter for Multitarget Tracking. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 1601–1618. [Google Scholar] [CrossRef]
- Hlinka, O.; Hlawatsch, F.; Djuric, P.M. Distributed Particle Filtering in Agent Networks. IEEE Signal Process. Mag. 2013, 30, 61–81. [Google Scholar] [CrossRef]
- Yang, T.; Laugesen, R.S.; Mehta, P.G.; Meyn, S.P. Multivariable feedback particle filter. Automatica 2016, 71, 10–23. [Google Scholar] [CrossRef]
- Boers, Y.; Driessen, J.N. Interacting multiple model particle filter. IEEE Proc. Radar Sonar Navig. 2003, 150, 344–349. [Google Scholar] [CrossRef]
- Keshavarz-Mohammadiyan, A.; Khaloozadeh, H. Adaptive IMMPF for bearing-only maneuvering target tracking in Wireless Sensor networks. In Proceedings of the 4th International Conference on Control, Instrumentation, and Automation (ICCIA), Qazvin, Iran, 27–28 Janurary 2016; pp. 6–11. [Google Scholar]
- Li, L.; Xie, W.; Huang, J.; Huang, J. Multiple Model Rao–Blackwellized Particle Filter for Maneuvering Target Tracking. Int. J. Def. Sci. 2009, 59, 197–204. [Google Scholar]
- Yu, J.Y.; Coates, M.J.; Rabbat, M.G.; Blouin, S. A Distributed Particle Filter for Bearings-Only Tracking on Spherical Surfaces. IEEE Signal Process. Lett. 2016, 23, 326–330. [Google Scholar] [CrossRef]
- Taghavi, E.; Tharmarasa, R.; Kirubarajan, T.; McDonald, M. Multisensor-multitarget bearing-only sensor registration. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 1654–1666. [Google Scholar] [CrossRef]
- Li, L.; Xie, W.; Liu, Z. Bearings-only maneuvering target tracking based on truncated quadrature Kalman filtering. Int. J. Electron. Commun. 2015, 69, 281–289. [Google Scholar]
- Ienkaran, A, Simon, H. Discrete-Time Nonlinear Filtering Algorithms Using Gauss-Hermit Quadrature. Proc. IEEE 2007, 95, 953–976. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | EKF | UKF | QKF | PF | MTUKF(3) | ATUKF |
|---|---|---|---|---|---|---|
| UNGM | 1.102 | 6.650 | 15.264 | 522.519 | 43.142 | 16.240 |
| Case | IMMEKF | IMMRBPF | TQKF | ATUKF |
|---|---|---|---|---|
| BOT | 0.074 | 14.493 | 0.553 | 0.150 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, L.-Q.; Wang, X.-L.; Liu, Z.-X.; Xie, W.-X. Auxiliary Truncated Unscented Kalman Filtering for Bearings-Only Maneuvering Target Tracking. Sensors 2017, 17, 972. https://doi.org/10.3390/s17050972
Li L-Q, Wang X-L, Liu Z-X, Xie W-X. Auxiliary Truncated Unscented Kalman Filtering for Bearings-Only Maneuvering Target Tracking. Sensors. 2017; 17(5):972. https://doi.org/10.3390/s17050972
Chicago/Turabian StyleLi, Liang-Qun, Xiao-Li Wang, Zong-Xiang Liu, and Wei-Xin Xie. 2017. "Auxiliary Truncated Unscented Kalman Filtering for Bearings-Only Maneuvering Target Tracking" Sensors 17, no. 5: 972. https://doi.org/10.3390/s17050972
APA StyleLi, L. -Q., Wang, X. -L., Liu, Z. -X., & Xie, W. -X. (2017). Auxiliary Truncated Unscented Kalman Filtering for Bearings-Only Maneuvering Target Tracking. Sensors, 17(5), 972. https://doi.org/10.3390/s17050972