Two Novel Two-Stage Direction of Arrival Estimation Algorithms for Two-Dimensional Mixed Noncircular and Circular Sources

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
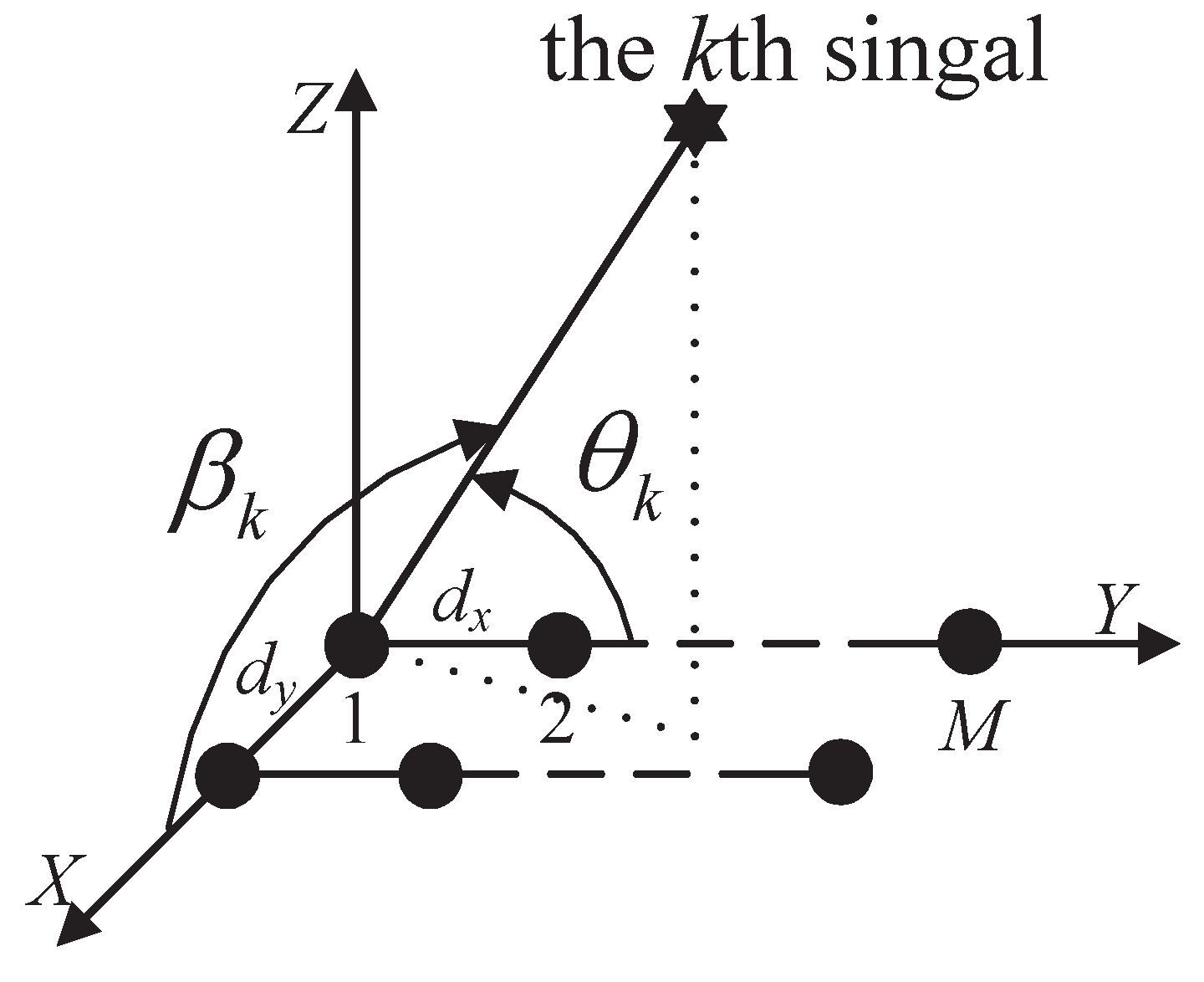
2. Array Signal Model
3. The Two Proposed Algorithms
3.1. The TSDOAM Method
- Step 1:
- Step 2:
- Execute the EVD of to get its pseudo-inverse matrix ;
- Step 3:
- Perform the EVD of with Equation (18);
- Step 4:
- Step 5:
- Construct the matrix with the estimate and ;
- Step 6:
- Step 7:
- Repeat Step 2 to Step 4 for the and .
3.2. The TSRARE Method
4. Location Discussion and Analysis
5. Simulation Results
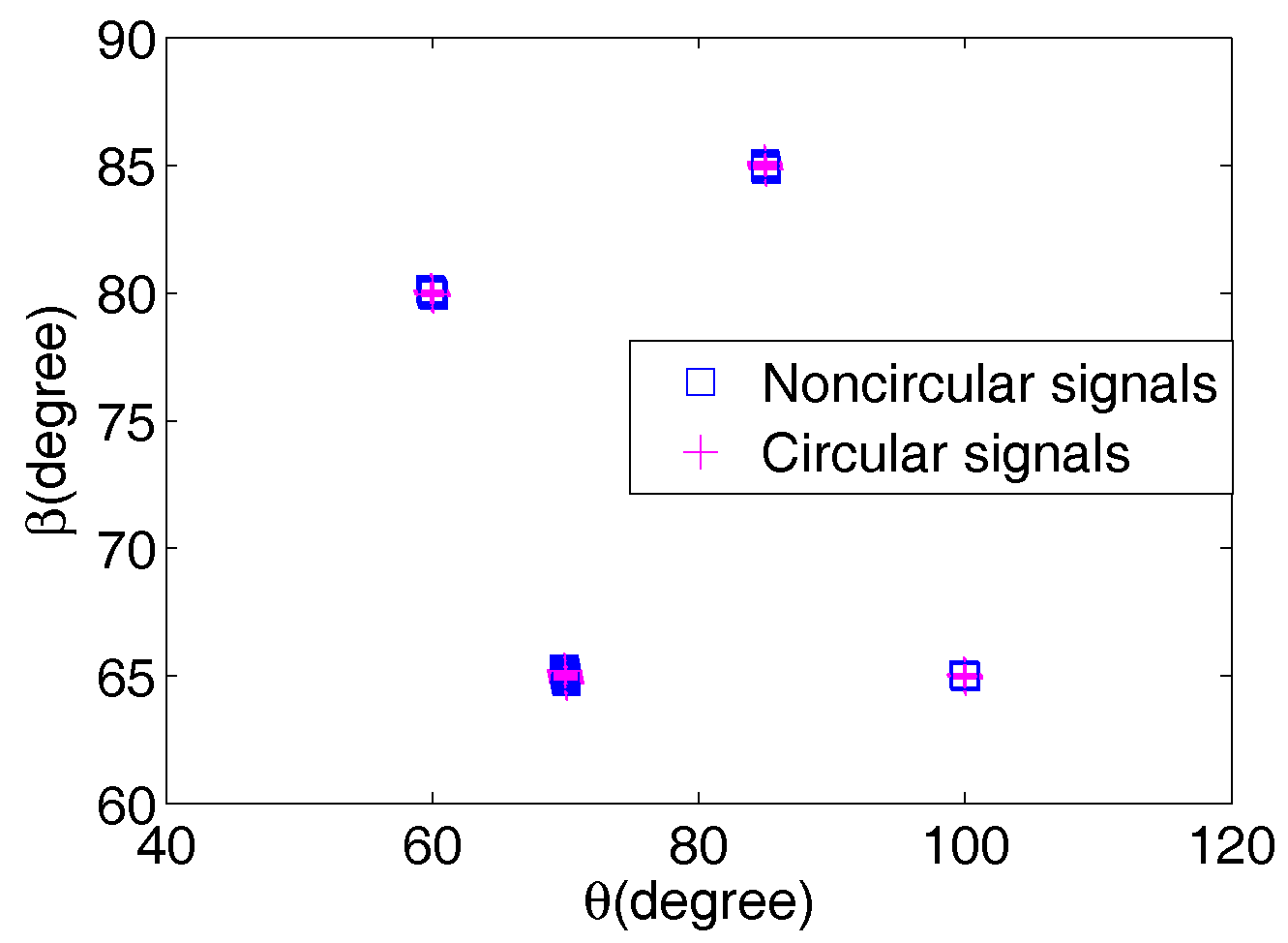
5.1. 2D Direction-of-Arrival Estimation Performance
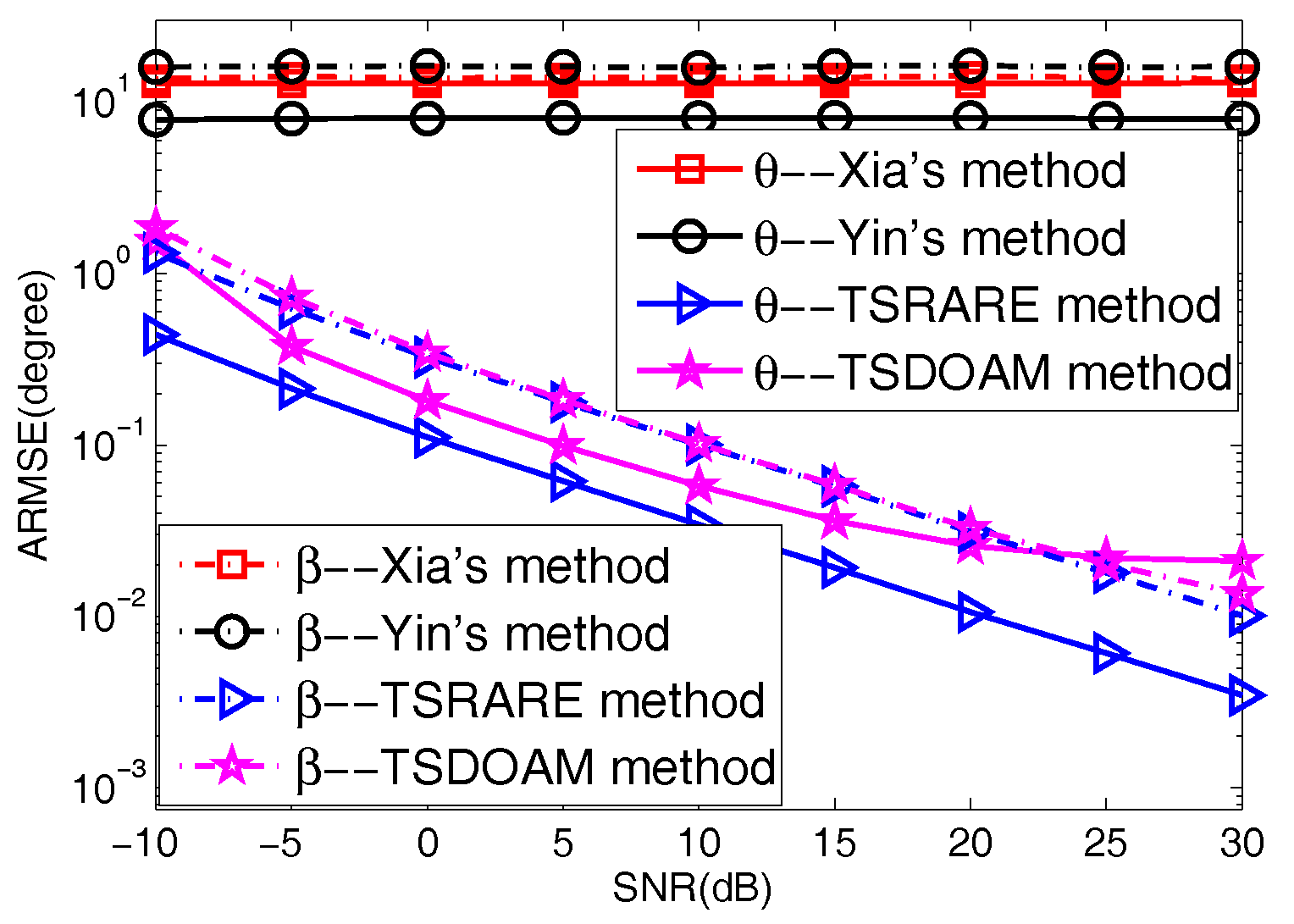
5.2. The Effect of SNR
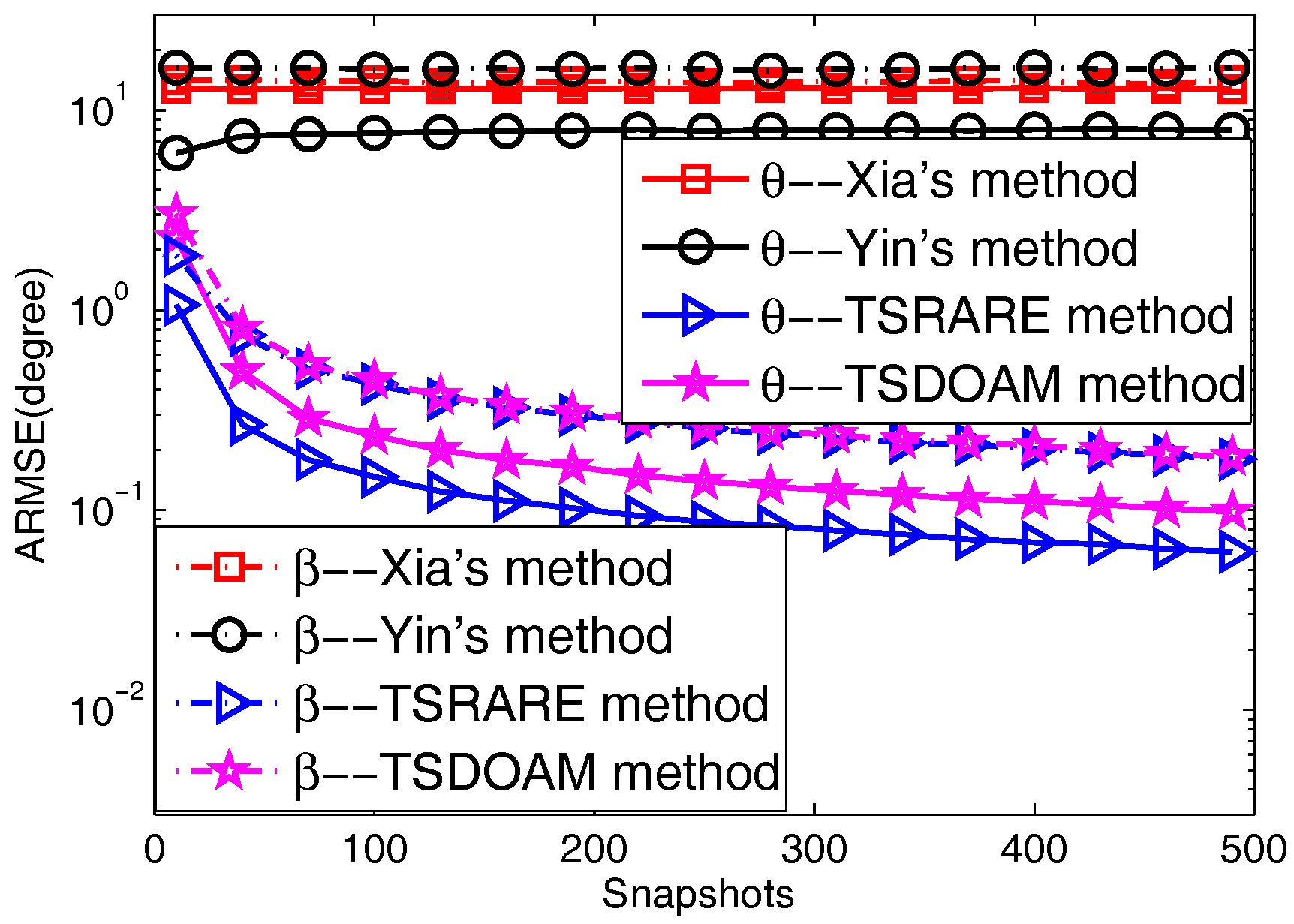
5.3. The Effect of Snapshots
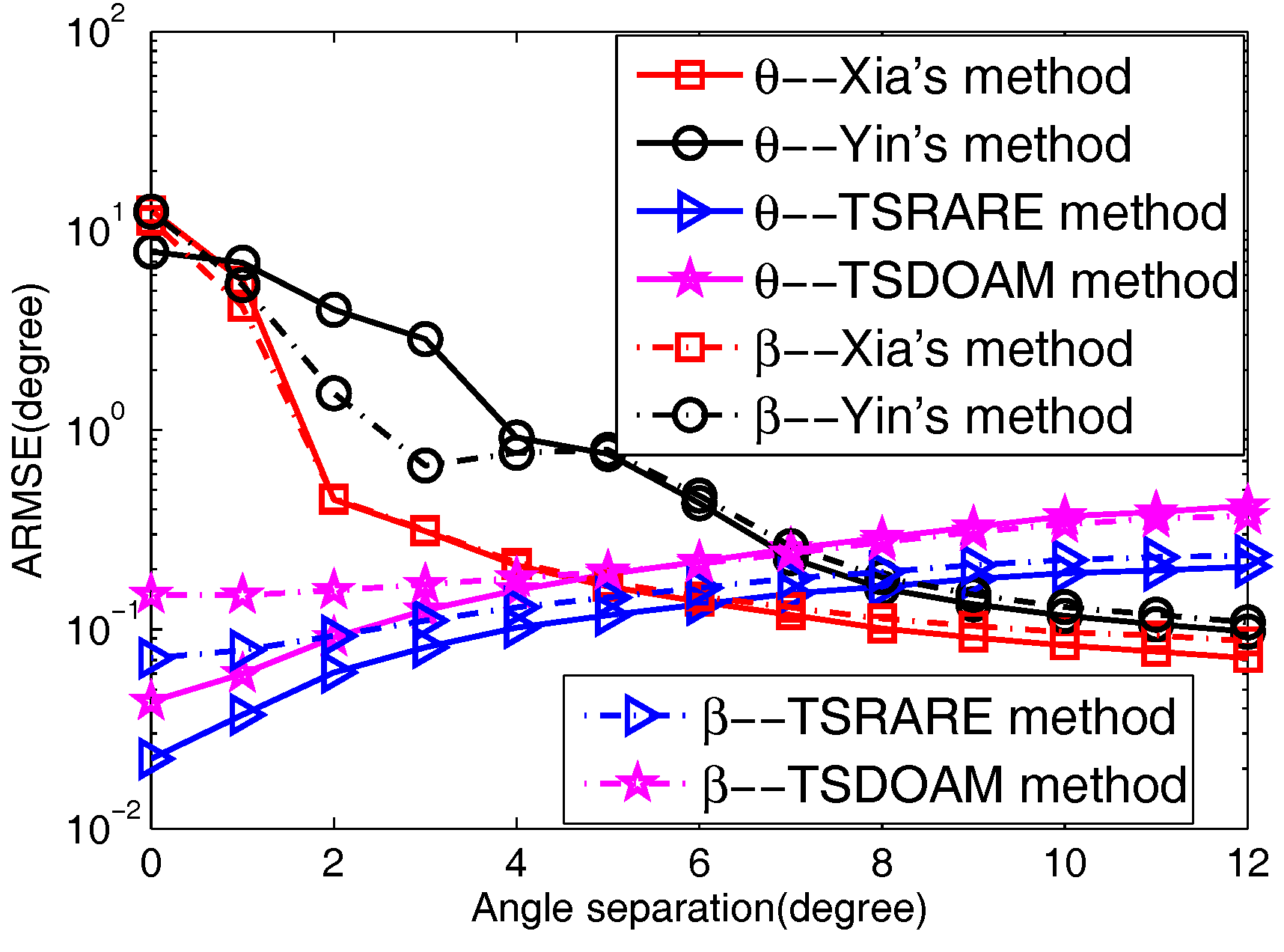
5.4. The Effect of Angle Separation
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| DOA | direction-of-arrival |
| DOAs | directions-of-arrival |
| TSDOAM | two-stage direction-of-arrival matrix |
| TSRARE | two-stage rank reduction |
| ERARE | extended rank reduction |
| ULAs | uniform linear arrays |
| ESPAR | electronically steerable parasitic antenna radiator |
| EVD | eigen-value decomposition |
| SVD | singular-value decomposition |
| MUSIC | multiple signal classification |
| SNR | signal-to-noise ratio |
| ARMSE | average root mean square error |
| CRB | Cramér–Rao bound |
References
- Liu, J.; Huang, Z.T.; Zhou, Y.Y. Extended 2q-MUSIC algorithm for noncircular signals. Signal Process. 2008, 88, 1327–1339. [Google Scholar] [CrossRef]
- Steinwandt, J.; Roemer, F.; Haardt, M.; Galdo, G.D. R-dimensional ESPRIT-type algorithms for strictly second-order non-circular sources and their performance analysis. IEEE Trans. Signal Process. 2014, 62, 4824–4838. [Google Scholar] [CrossRef]
- Abeida, H.; Delmas, J.P. MUSIC-like estimation of direction of arrival for noncircular sources. IEEE Trans. Signal Process. 2006, 54, 2678–2690. [Google Scholar] [CrossRef]
- Haardt, M.; Romer, F. Enhancements of unitary ESPRIT for non-circular sources. In Proceedings of the IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP’04), Montreal, QC, Canada, 17–21 May 2004. [Google Scholar]
- Huang, Z.T.; Liu, Z.M.; Liu, J.; Zhou, Y.Y. Performance analysis of MUSIC for non-circular signals in the presence of mutual coupling. IET Radar Sonar Navig. 2010, 4, 703–711. [Google Scholar] [CrossRef]
- Charge, P.; Wang, Y.D.; Saillard, J. A non-circular sources direction finding method using polynomial rooting. Signal Process. 2001, 81, 1765–1770. [Google Scholar] [CrossRef]
- Abeida, H.; Delmas, J.P. Gaussian Cramer-Rao bound for direction estimation of noncircular signals in unknown noise fields. IEEE Trans. Signal Process. 2005, 53, 4610–4618. [Google Scholar] [CrossRef]
- Shi, Z.; Zhou, C.; Gu, Y.; Goodman, N.A.; Qu, F. Source Estimation using Coprime Array: A Sparse Reconstruction Perspective. IEEE Sens. J. 2017, 17, 755–765. [Google Scholar] [CrossRef]
- Zhou, C.; Gu, Y.; He, S.; Shi, Z. A Robust and Efficient Algorithm for Coprime Array Adaptive Beamforming. IEEE Trans. Veh. Technol. 2017. [Google Scholar] [CrossRef]
- Zhou, C.; Gu, Y.; Zhang, Y.D.; Shi, Z.; Jin, T.; Wu, X. Compressive Sensing based Coprime Array Direction-of-Arrival Estimation. IET Commun. 2017. [Google Scholar] [CrossRef]
- Xu, Y.G.; Liu, Z.W. Noncircularity restoral for multi-antenna blind beamforming. Multidimens. Syst. Signal Process. 2010, 21, 133–160. [Google Scholar] [CrossRef]
- Chevalier, P.; Delmas, J.P.; Oukaci, A. Optimal widely linear MVDR beamforming for noncircular signals. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP2009), Taipei, Taiwan, 19–24 April 2009; pp. 3573–3576. [Google Scholar]
- Xu, Y.G.; Ma, J.Y.; Liu, Z.W.; Liu, W. A class of diagonally loaded robust Capon beamformers for noncircular signals of interest. Signal Process. 2014, 94, 670–680. [Google Scholar] [CrossRef]
- Tao, H.; Xin, J.M.; Wang, J.S.; Zheng, N.N.; Sano, A. Two-Dimensional Direction Estimation for a Mixture of Noncoherent and Coherent Signals. IEEE Trans. Signal Process. 2015, 63, 318–333. [Google Scholar] [CrossRef]
- Yin, Q.Y.; Newcomb, R.W.; Zou, L.H. Estimating 2-D angles of arrival via two parallel linear arrays. In Proceedings of the 1989 International Conference on Acoustics, Speech and Signal Processing (ICASSP), Glasgow, UK, 23–26 May 1989; pp. 2803–2806. [Google Scholar]
- Xia, T.Q.; Zheng, Y.; Wan, Q.; Wang, X.G. Decoupled estimation of 2-D angles of arrival using two parallel uniform linear arrays. IEEE Trans. Antennas Propag. 2007, 55, 2627–2632. [Google Scholar] [CrossRef]
- Chen, H.; Hou, C.P.; Wang, Q.; Huang, L.; Yan, W.Q. Cumulants-based Toeplitz matrices reconstruction method for 2-D coherent doa estimation. IEEE Sens. J. 2014, 14, 2824–2832. [Google Scholar] [CrossRef]
- Li, J.F.; Zhang, X.F.; Chen, H. Improved two-dimensional DOA estimation algorithm for two-parallel uniform linear arrays using propagator method. Signal Process. 2012, 92, 3032–3038. [Google Scholar] [CrossRef]
- Chen, H.; Hou, C.P.; Liu, W.; Zhu, W.-P.; Swamy, M.N.S. Effcient Two-Dimensional Direction of Arrival Estimation for a Mixture of Circular and Noncircular Sources. IEEE Sens. J. 2016, 16, 2527–2536. [Google Scholar] [CrossRef]
- Al-Jazzar, S.O.; McLernon, D.C.; Smadi, M.A. SVD-based joint azimuth/elevation estimation with automatic pairing. Signal Process. 2010, 90, 1669–1675. [Google Scholar] [CrossRef]
- Kikuchi, S.; Tsuji, H.; Sano, A. Pair-matching method for estimating 2-D angle of arrival with a cross-correlation matrix. IEEE Antennas Wirel. Propag. Lett. 2006, 5, 35–40. [Google Scholar] [CrossRef]
- Liang, J.L.; Liu, D. Joint elevation and azimuth direction finding using L-shaped array. IEEE Trans. Antennas Propag. 2010, 58, 2136–2141. [Google Scholar] [CrossRef]
- Tayem, N.; Kwon, H.M. L-shape 2-dimensional arrival angle estimation with propagator method. IEEE Trans. Antennas Propag. 2005, 53, 1622–1630. [Google Scholar] [CrossRef]
- Wang, G.M.; Xin, J.M.; Zheng, N.N.; Sano, A. Computationally efficient subspace-based method for two-dimensional direction estimation with L-shaped array. IEEE Trans. Signal Process. 2011, 59, 3197–3212. [Google Scholar] [CrossRef]
- Gu, J.F.; Wei, P. Joint SVD of two cross-correlation matrices to achieve automatic pairing in 2-d angle estimation problems. IEEE Antennas Wirel. Propag. Lett. 2007, 6, 553–556. [Google Scholar] [CrossRef]
- Dong, Y.Y.; Dong, C.; Liu, W.; Chen, H.; Zhao, G.Q. 2-D DOA Estimation for L-Shaped Array With Array Aperture and Snapshots Extension Techniques. IEEE Signal Process. Lett. 2017, 24, 495–499. [Google Scholar] [CrossRef]
- Nie, X.; Li, L.P. A Computationally Efficient Subspace Algorithm for 2-D DOA Estimation with L-shaped Array. IEEE Signal Process. Lett. 2014, 21, 971–974. [Google Scholar]
- Chen, H.; Hou, C.P.; Zhu, W.P.; Liu, W.; Dong, Y.Y.; Peng, Z.J.; Wang, Q. ESPRIT-like two-dimensional direction finding for mixed circular and strictly noncircular sources based on joint diagonalization. Signal Process. 2017. [Google Scholar] [CrossRef]
- Wu, H.; Hou, C.; Chen, H.; Liu, W.; Wang, Q. Direction fnding and mutual coupling estimation for uniform rectangular arrays. Signal Process. 2015, 117, 61–68. [Google Scholar] [CrossRef]
- Chen, F.J.; Kwong, S.; Kok, C.W. Esprit-like two-dimensional DOA estimation for coherent signals. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 1477–1484. [Google Scholar] [CrossRef]
- Liu, J.; Huang, Z.T.; Zhou, Y.Y. Azimuth and elevation estimation for noncircular signals. Electron. Lett. 2007, 43, 1117–1119. [Google Scholar] [CrossRef]
- Gan, L.; Gu, J.F.; Wei, P. Estimation of 2-D DOA for noncircular sources using simultaneous SVD technique. IEEE Antennas Wirel. Propag. Lett. 2008, 7, 385–388. [Google Scholar] [CrossRef]
- Haardt, M.; Romer, F. Efficient 1-D and 2-D DOA Estimation for Non-Circular Sourceswith Hexagonal Shaped Espar Arrays. In Proceedings of the 2006 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Toulouse, France, 14–19 May 2006; pp. 14–19. [Google Scholar]
- Gao, F.F.; Nallanathan, A.; Wang, Y.D. Improved MUSIC Under the Coexistence of Both Circular and Noncircular Sources. IEEE Trans. Signal Process. 2008, 56, 3033–3038. [Google Scholar] [CrossRef]
- Liu, A.F.; Liao, G.S.; Xu, Q.; Zeng, C. A circularity-based DOA estimation method under coexistence of noncircular and circular signals. In Proceedings of the 2012 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Kyoto, Japan, 25–30 March 2012; pp. 2561–2564. [Google Scholar]
- Liu, Z.M.; Huang, Z.T.; Zhou, Y.Y.; Liu, J. Direction-of-arrival estimation of noncircular signals via sparse representation. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 2690–2698. [Google Scholar] [CrossRef]
- Mavromatidis, L.E. A review on hybrid optimization algorithms to coalesce computational morphogenesis with interactive energy consumption forecasting. Energy Build. 2015, 106, 192–202. [Google Scholar] [CrossRef]
- Mavromatidis, L.E.; El Mankibi, M.; Michel, P.; Bykalyuk, A.; Santamouris, M. Guidelines to study numerically and experimentally reflective insulation systems as applied to buildings. Adv. Build. Energy Res. 2012, 6, 2–35. [Google Scholar] [CrossRef]
- Mavromatidis, L.E. Study of coupled transient radiation-natural convection heat transfer across rectangular cavities in the vicinity of low emissivity thin films for innovative building envelope applications. Energy Build. 2016, 120, 114–134. [Google Scholar] [CrossRef]
- Mavromatidis, L. Linking Wide-ranging Geometrical and Non-geometrical Glazing Options for Daylight Effectiveness Estimation at an Early Design Stage. Energy Procedia 2015, 78, 711–716. [Google Scholar] [CrossRef]
- Searle, S.R. Matrix Algebra Useful for Statistics; Wiley-Interscience: Hoboken, NJ, USA, 2006. [Google Scholar]
- Liang, J.L.; Zeng, X.J.; Wang, W.Y.; Chen, H.Y. L-shaped array-based elevation and azimuth direction finding in the presence of mutual coupling. Signal Process. 2011, 91, 1319–1328. [Google Scholar] [CrossRef]





© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, H.; Leng, W.; Guan, Z.; Jin, T. Two Novel Two-Stage Direction of Arrival Estimation Algorithms for Two-Dimensional Mixed Noncircular and Circular Sources. Sensors 2017, 17, 1433. https://doi.org/10.3390/s17061433
Shi H, Leng W, Guan Z, Jin T. Two Novel Two-Stage Direction of Arrival Estimation Algorithms for Two-Dimensional Mixed Noncircular and Circular Sources. Sensors. 2017; 17(6):1433. https://doi.org/10.3390/s17061433
Chicago/Turabian StyleShi, Heping, Wen Leng, Zhiwei Guan, and Tongzhi Jin. 2017. "Two Novel Two-Stage Direction of Arrival Estimation Algorithms for Two-Dimensional Mixed Noncircular and Circular Sources" Sensors 17, no. 6: 1433. https://doi.org/10.3390/s17061433
APA StyleShi, H., Leng, W., Guan, Z., & Jin, T. (2017). Two Novel Two-Stage Direction of Arrival Estimation Algorithms for Two-Dimensional Mixed Noncircular and Circular Sources. Sensors, 17(6), 1433. https://doi.org/10.3390/s17061433