
Analysis of Public Datasets for Wearable Fall Detection Systems



Abstract
:1. Introduction
2. Types of Fall Detection Systems: Review of Other Datasets
3. Search Methodology and Basic Information of the Existing Datasets
4. Analysis of the Testbed: Experimental Subjects and Scenarios
5. Number, Duration and Typology of the Movements
6. Number, Characteristics and Position of the Sensors
7. Analysis of the Datasets
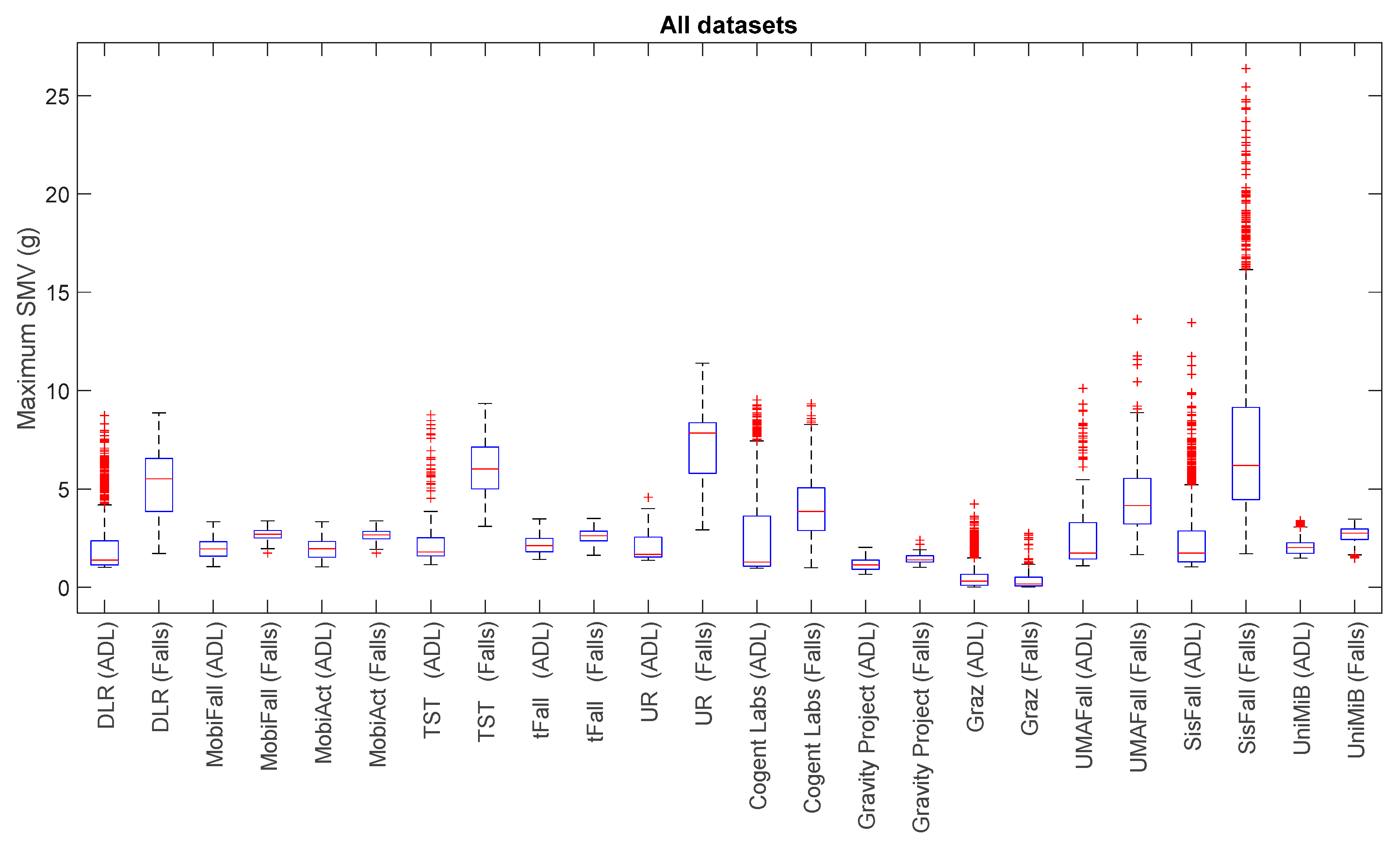
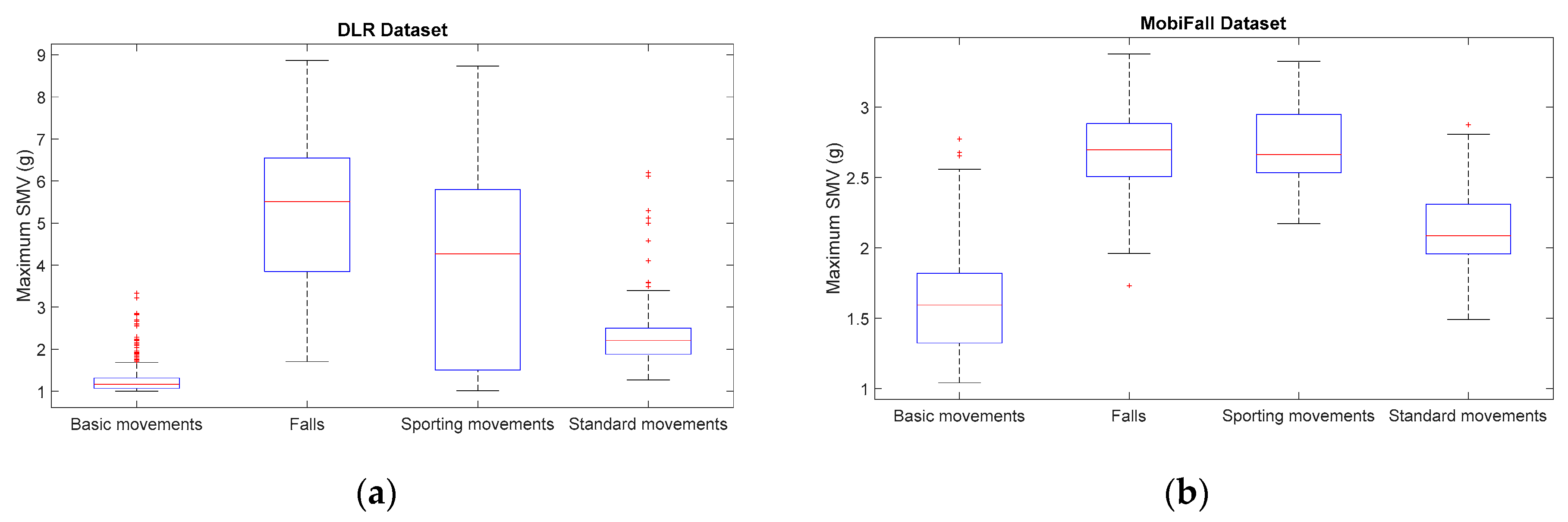
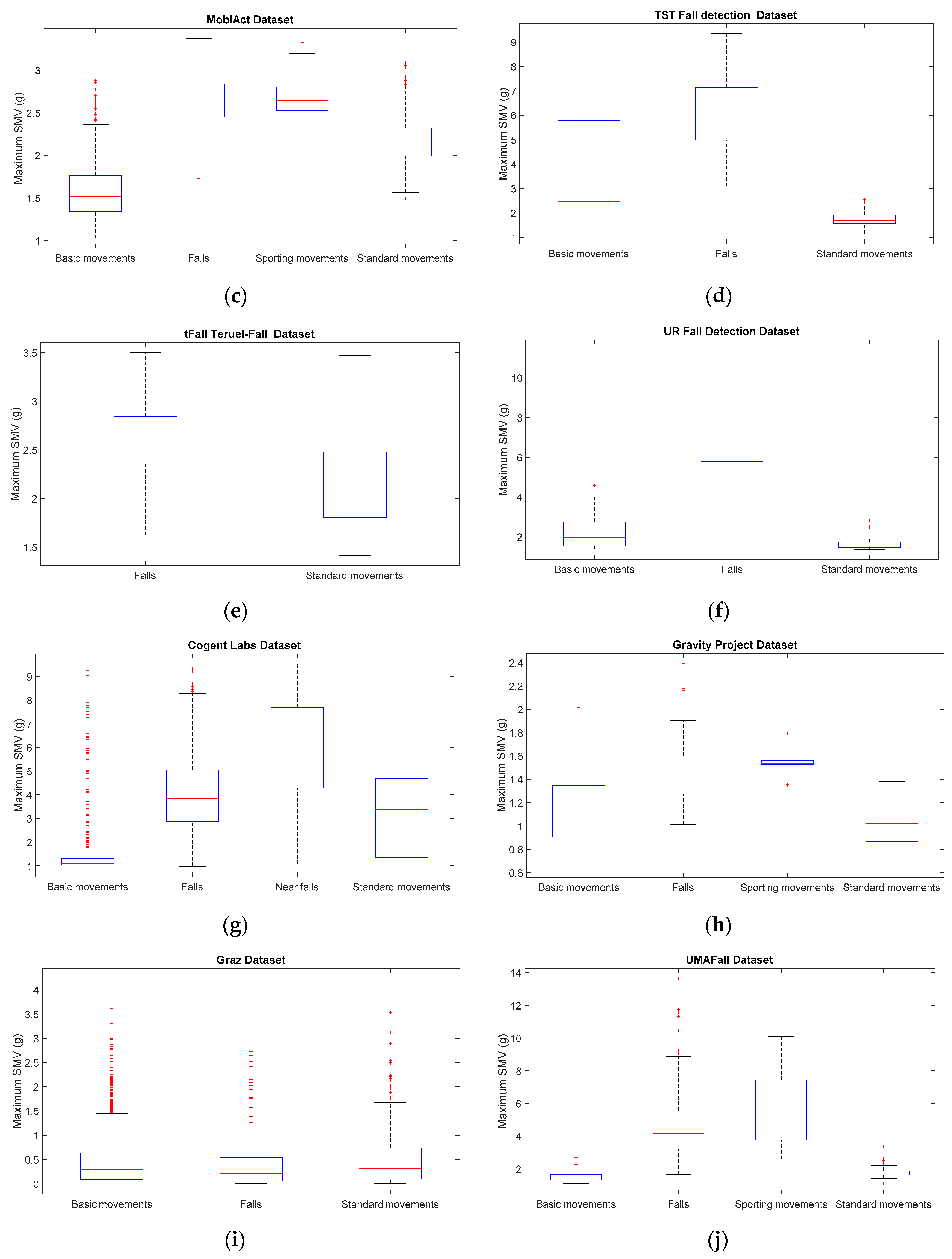
- 1.
- Maximum value of the acceleration module, which can be estimated from the traces as:
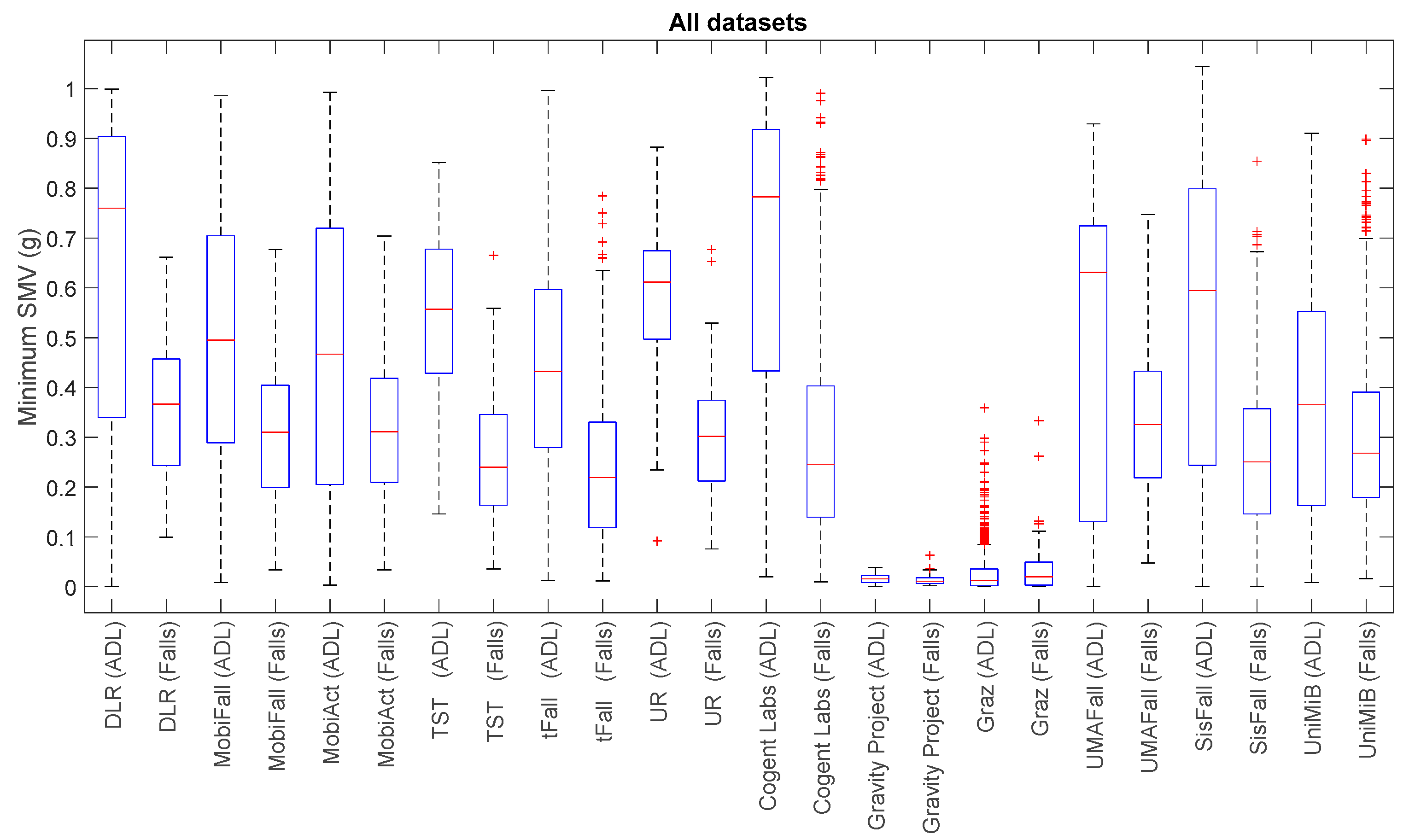
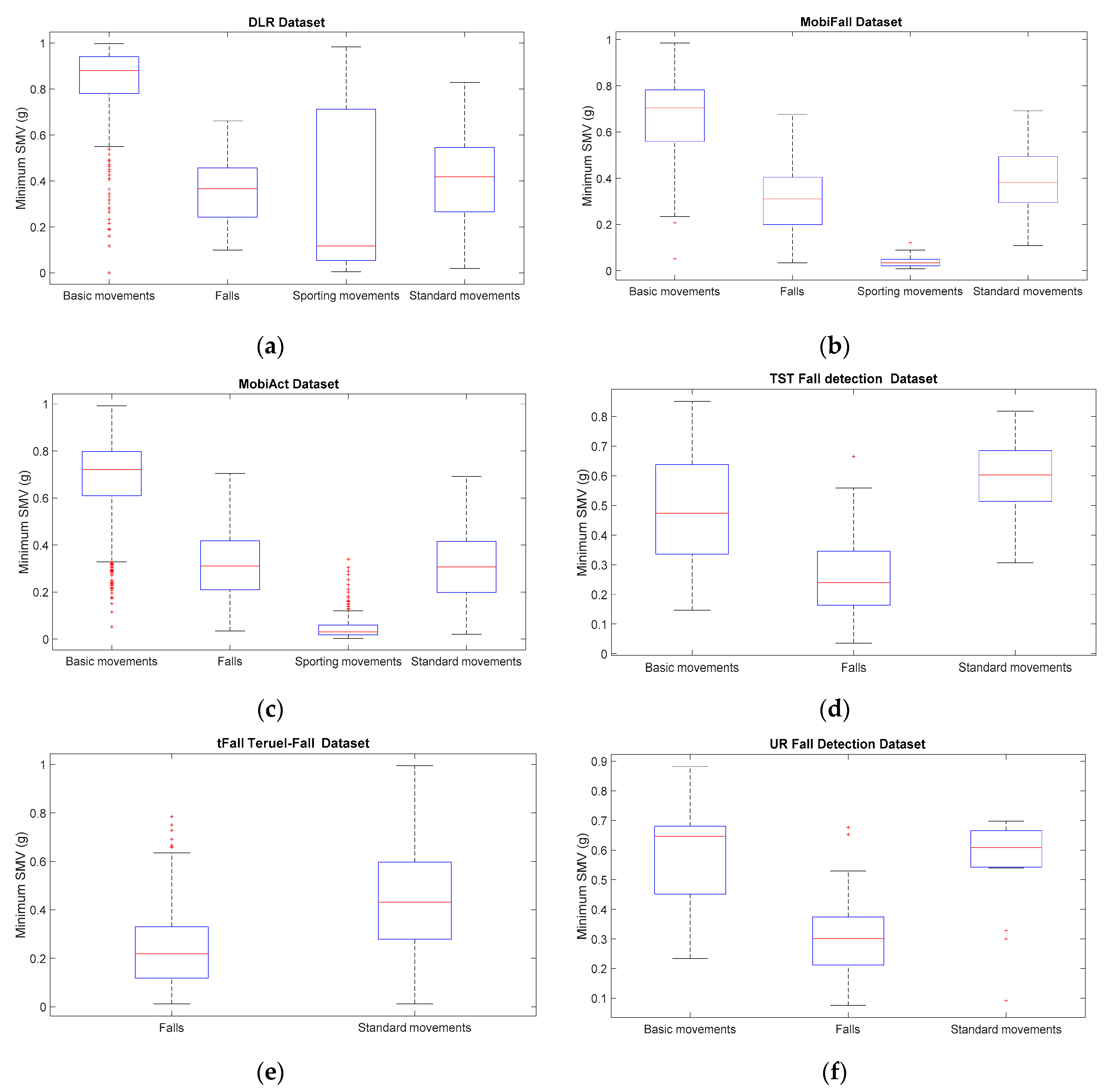
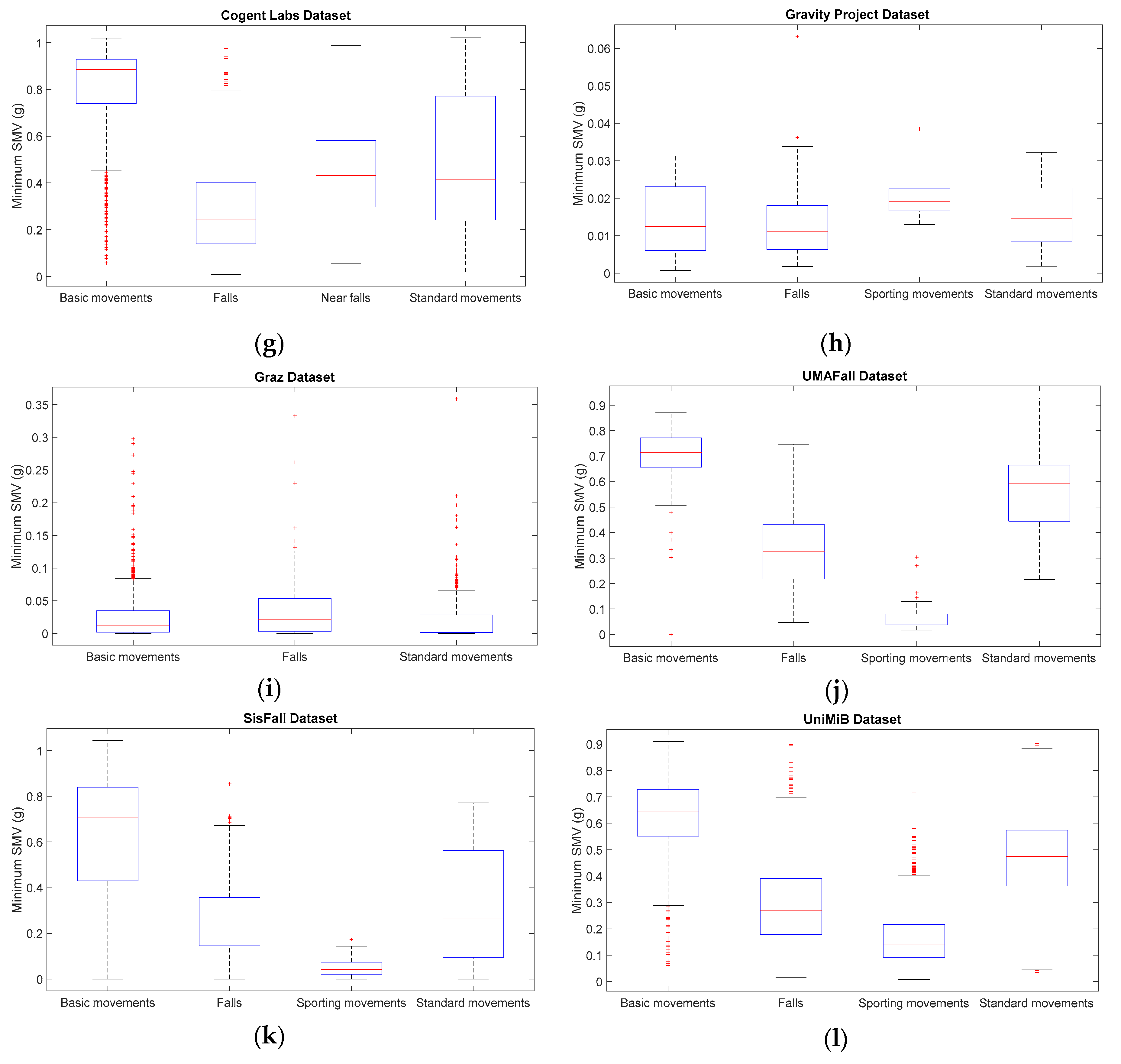
- 2.
- Minimum value of the acceleration module, which is computed as:
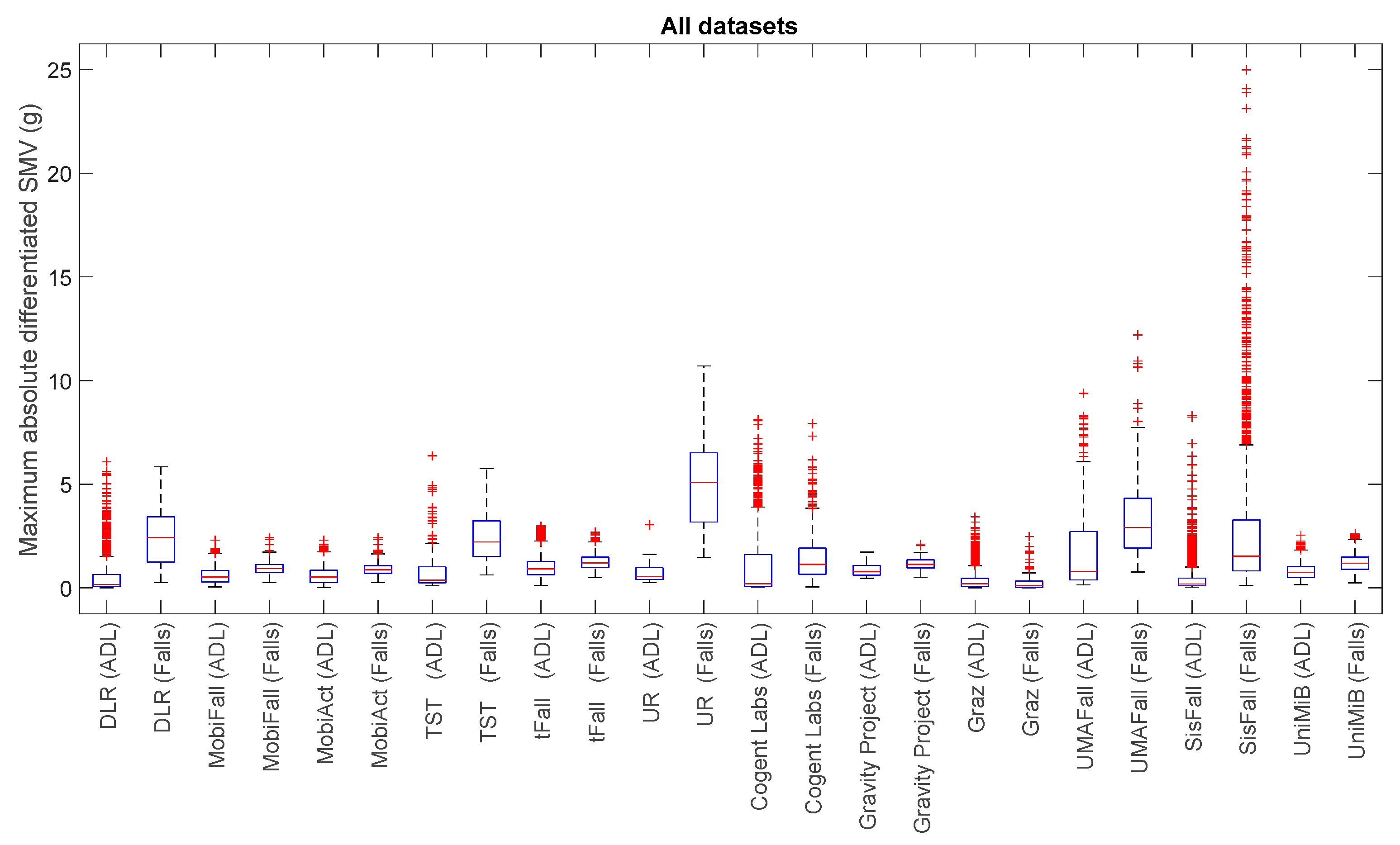
- 3.
- Maximum absolute value of the differentiated acceleration module, which can be estimated as:
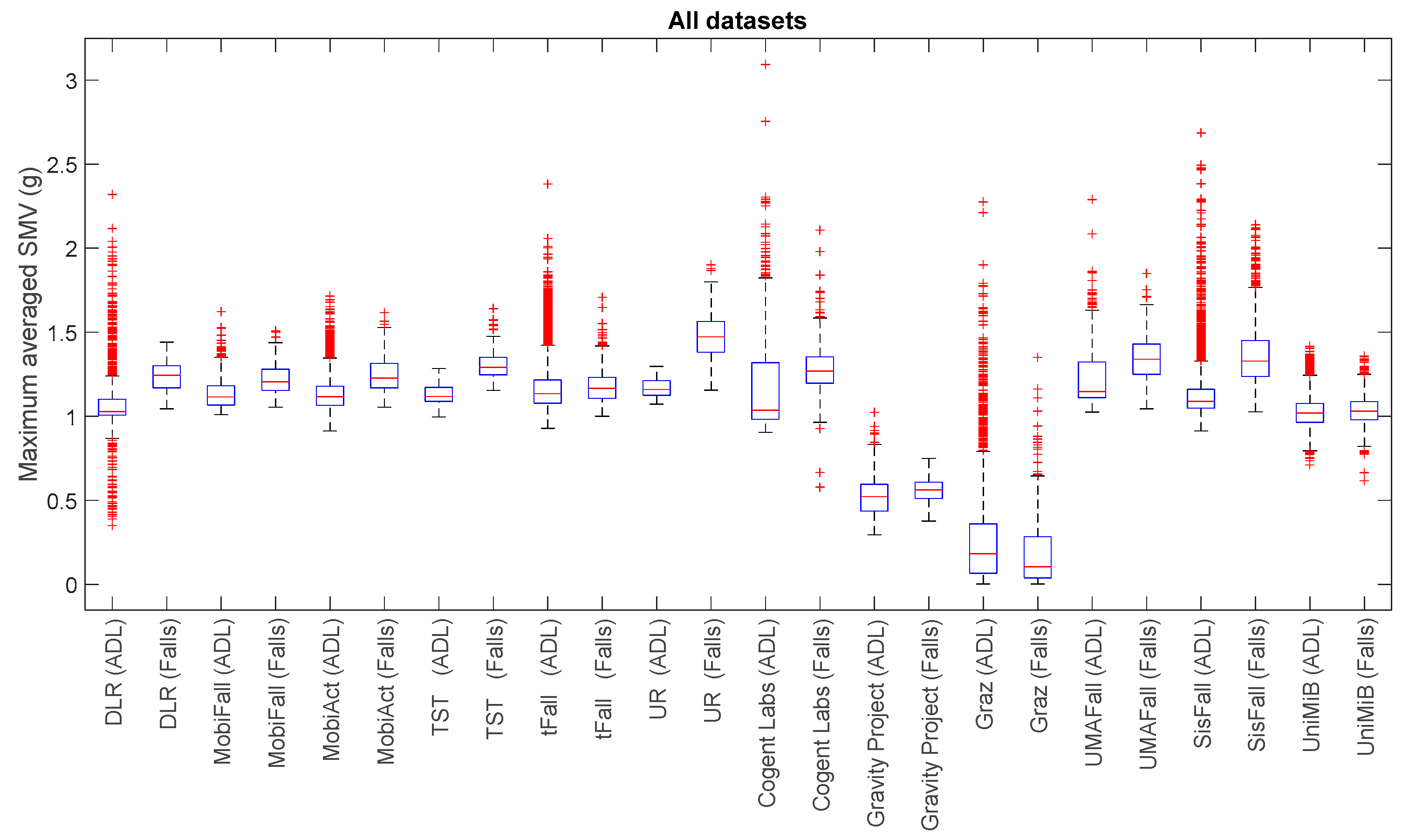
- 4.
- Maximum averaged acceleration module estimated for a sliding window (W) of 1 s.
8. Conclusions
- In our opinion, when a dataset is selected, the number of samples and experimental subjects, as well as the variety of tested types of ADLs and falls should be prioritized as selection criteria.
- The impact of the range of the employed sensors (especially the accelerometer) on the validity of the samples should not be neglected before the use of the samples for validation purposes.
- Given the heterogeneity of existing repositories, the efficacy of a FDS should be always contrasted against more than one dataset.
- The evaluation of a FDS should include datasets (such as tFall) which incorporate traces captured during the actual daily life of the experimental subjects.
- Apart from describing the particular movements emulated during the experiments, ADLs should be classified into a small number of general categories depending on the mobility of the performed activities. This categorization is required to assess the actual effectiveness of the FDS when applied to different target populations.
- Future datasets should insist on collecting data (at least from ADLs) from a population of older people. To this day, the influence of the age of the experimental subjects on the characteristics of the available datasets has not been studied in detail.
- A common procedure to generate and document fall datasets is still required.
- The lack of a public dataset with a representative number of samples obtained from real-life falls noticeably hinders the reliability of the research on FDS.
Acknowledgments
Author Contributions
Conflicts of Interests
References
- Yoshida, S. A Global Report on Falls Prevention Epidemiology of Falls; World Health Organization: Geneva, Switzerland, 2007. [Google Scholar]
- Orces, C.H.; Alamgir, H. Trends in fall-related injuries among older adults treated in emergency departments in the USA. Inj. Prev. 2014, 20, 421–423. [Google Scholar] [CrossRef] [PubMed]
- Noury, N.; Fleury, A.; Rumeau, P.; Bourke, A.K.; Laighin, G.O.; Rialle, V.; Lundy, J.E. Fall detection-principles and methods. In Proceedings of the 29th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBS 2007), Lyon, France, 22–26 August 2007; Dittmar, A., Clark, J., Eds.; pp. 1663–1666. [Google Scholar]
- Bourke, A.K.; van de Ven, P.W.J.; Chaya, A.E.; OLaighin, G.M.; Nelson, J. Testing of a long-term fall detection system incorporated into a custom vest for the elderly. In Proceedings of the 30th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBS 2008), Vancouver, BC, Canada, 20–25 August 2008; Volume 2008, pp. 2844–2847. [Google Scholar]
- Kangas, M.; Vikman, I.; Nyberg, L.; Korpelainen, R.; Lindblom, J.; Jämsä, T. Comparison of real-life accidental falls in older people with experimental falls in middle-aged test subjects. Gait Posture 2012, 35, 500–505. [Google Scholar] [CrossRef] [PubMed]
- Barralon, P.; Dorronsoro, I.; Hernandez, E. Automatic fall detection: Complementary devices for a better fall monitoring coverage. In Proceedings of the IEEE 15th International Conference on e-Health Networking, Applications and Services (Healthcom 2013), Lisbon, Portugal, 9–12 October 2013; pp. 590–593. [Google Scholar]
- Kostopoulos, P.; Nunes, T.; Salvi, K.; Deriaz, M.; Torrent, J. F2D: A fall detection system tested with real data from daily life of elderly people. In Proceedings of the 17th International Conference on e-Health Networking, Application & Services (HealthCom), Boston, MA, USA, 14–17 October 2015; pp. 397–403. [Google Scholar]
- Yuan, J.; Tan, K.K.; Lee, T.H.; Koh, G.C.H. Power-Efficient Interrupt-Driven Algorithms for Fall Detection and Classification of Activities of Daily Living. IEEE Sens. J. 2015, 15, 1377–1387. [Google Scholar] [CrossRef]
- Bagalà, F.; Becker, C.; Cappello, A.; Chiari, L.; Aminian, K.; Hausdorff, J.M.; Zijlstra, W.; Klenk, J. Evaluation of accelerometer-based fall detection algorithms on real-world falls. PLoS ONE 2012, 7, e37062. [Google Scholar] [CrossRef] [PubMed]
- FARSEEING (FAll Repository for the Design of Smart and Self-Adaptive Environments Prolonging Independent Living) Project. Available online: http://farseeingresearch.eu/ (accessed on 8 March 2016).
- Mubashir, M.; Shao, L.; Seed, L. A survey on fall detection: Principles and approaches. Neurocomputing 2013, 100, 144–152. [Google Scholar] [CrossRef]
- Trapet, A. Fall Detection Dataset—Le2i—Laboratoire Electronique, Informatique et Image (CNRS, Dijon, France). Available online: http://le2i.cnrs.fr/Fall-detection-Dataset?lang=fr (accessed on 24 March 2017).
- Auvinet, E.; Rougier, C.; Meunier, J.; St-Arnaud, A.; Rousseau, J. Multiple Cameras Fall Dataset; DIRO-Université Montréal: Montreal, QC, Canada, 2010. [Google Scholar]
- Baldewijns, G.; Debard, G.; Mertes, G.; Vanrumste, B.; Croonenborghs, T. Bridging the gap between real-life data and simulated data by providing a highly realistic fall dataset for evaluating camera-based fall detection algorithms. Healthc. Technol. Lett. 2016, 3, 6–11. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z.; Athitsos, V. The Falling Detection Dataset—The University of Texas at Arlington. Available online: http://vlm1.uta.edu/~zhangzhong/fall_detection/ (accessed on 24 March 2017).
- MEBIOMEC (Universidad Politécnica de Valencia). Fall Detection Testing Dataset. Available online: https://mebiomec.ai2.upv.es/filedepot_folder/fall-detection-testing-dataset (accessed on 24 March 2017).
- Klonovs, J.; Haque, M.A.; Krueger, V.; Nasrollahi, K.; Andersen-Ranberg, K.; Moeslund, T.B.; Spaich, E.G. Datasets. In Distributed Computing and Monitoring Technologies for Older Patients; Springer International Publishing: Cham, Switzerland, 2016; pp. 85–94. [Google Scholar]
- Kwapisz, J.R.; Weiss, G.M.; Moore, S.A. Activity recognition using cell phone accelerometers. ACM SigKDD Explor. Newsl. 2011, 12, 74–82. [Google Scholar] [CrossRef]
- Leutheuser, H.; Schuldhaus, D.; Eskofier, B.M.; Fukui, Y.; Togawa, T. Hierarchical, Multi-Sensor Based Classification of Daily Life Activities: Comparison with State-of-the-Art Algorithms Using a Benchmark Dataset. PLoS ONE 2013, 8, e75196. [Google Scholar] [CrossRef] [PubMed]
- Xue, Y.; Jin, L. A naturalistic 3D acceleration-based activity dataset & benchmark evaluations. In Proceedings of the IEEE International Conference on Systems Man and Cybernetics (SMC’2010), Istanbul, Turkey, 10–13 October 2010; pp. 4081–4085. [Google Scholar]
- Anguita, D.; Ghio, A.; Oneto, L.; Parra, X.; Reyes-Ortiz, J.L. A Public Domain Dataset for Human Activity Recognition using Smartphones. In Proceedings of the European Symposium on Artificial Neural Networks, Computational Intelligence and Machine Learning (ESANN 2013), Bruges, Belgium, 24–26 April 2013; pp. 437–442. [Google Scholar]
- Pattern Recognition Lab. University Erlangen-Nuremberg, G. ActivityNet. Available online: http://www.activitynet.org/ (accessed on 29 March 2017).
- Lichman, M. UCI Machine Learning Repository. Available online: http://archive.ics.uci.edu/ml (accessed on 19 May 2017).
- PiLR Health Home Page—PiLR Health. Available online: http://pilrhealth.com/ (accessed on 8 May 2017).
- CrowdSignals AlgoSnap Sample Dataset. Available online: http://crowdsignals.io/ (accessed on 19 April 2016).
- Koshmak, G.A.; Linden, M.; Loutfi, A. Fall risk probability estimation based on supervised feature learning using public fall datasets. In Proceedings of the 38th IEEE Annual International Conference of the Engineering in Medicine Biology Society (EMBC), Orlando, FL, USA, 16–20 August 2016; pp. 752–755. [Google Scholar]
- Igual, R.; Medrano, C.; Plaza, I. A comparison of public datasets for acceleration-based fall detection. Med. Eng. Phys. 2015, 37, 870–878. [Google Scholar] [CrossRef] [PubMed]
- Web Page of GiraffPlus Project. Available online: http://www.giraffplus.eu/ (accessed on 21 April 2017).
- Frank, K.; Vera Nadales, M.J.; Robertson, P.; Pfeifer, T. Bayesian recognition of motion related activities with inertial sensors. In Proceedings of the 12th ACM International Conference on Ubiquitous Computing, Copenhagen, Denmark, 26–29 September 2010; pp. 445–446. [Google Scholar]
- Vavoulas, G.; Pediaditis, M.; Spanakis, E.G.; Tsiknakis, M. The MobiFall dataset: An initial evaluation of fall detection algorithms using smartphones. In Proceedings of the IEEE 13th International Conference on Bioinformatics and Bioengineering (BIBE 2013), Chania, Greece, 10–13 November 2013; pp. 1–4. [Google Scholar]
- Vavoulas, G.; Chatzaki, C.; Malliotakis, T.; Pediaditis, M. The Mobiact dataset: Recognition of Activities of Daily living using Smartphones. In Proceedings of the International Conference on Information and Communication Technologies for Ageing Well and e-Health (ICT4AWE), Rome, Italy, 21–22 April 2016. [Google Scholar]
- Gasparrini, S.; Cippitelli, E.; Spinsante, S.; Gambi, E. A depth-based fall detection system using a Kinect® sensor. Sensors 2014, 14, 2756–2775. [Google Scholar] [CrossRef] [PubMed]
- Medrano, C.; Igual, R.; Plaza, I.; Castro, M. Detecting falls as novelties in acceleration patterns acquired with smartphones. PLoS ONE 2014, 9, e94811. [Google Scholar] [CrossRef] [PubMed]
- Kwolek, B.; Kepski, M. Human fall detection on embedded platform using depth maps and wireless accelerometer. Comput. Methods Progr. Biomed. 2014, 117, 489–501. [Google Scholar] [CrossRef] [PubMed]
- Ojetola, O.; Gaura, E.; Brusey, J. Data Set for Fall Events and Daily Activities from Inertial Sensors. In Proceedings of the 6th ACM Multimedia Systems Conference (MMSys’15), Portland, OR, USA, 18–20 March 2015; pp. 243–248. [Google Scholar]
- Vilarinho, T.; Farshchian, B.; Bajer, D.G.; Dahl, O.H.; Egge, I.; Hegdal, S.S.; Lones, A.; Slettevold, J.N.; Weggersen, S.M. A Combined Smartphone and Smartwatch Fall Detection System. In Proceedings of the 2015 IEEE International Conference on Computer and Information Technology; Ubiquitous Computing and Communications; Dependable, Autonomic and Secure Computing; Pervasive Intelligence and Computing (CIT/IUCC/DASC/PICOM), Liverpool, UK, 26–28 October 2015; pp. 1443–1448. [Google Scholar]
- Wertner, A.; Czech, P.; Pammer-Schindler, V. An Open Labelled Dataset for Mobile Phone Sensing Based Fall Detection. In Proceedings of the 12th EAI International Conference on Mobile and Ubiquitous Systems: Computing, Networking and Services (MOBIQUITOUS 2015), Coimbra, Portugal, 22–24 July 2015; pp. 277–278. [Google Scholar]
- Casilari, E.; Santoyo-Ramón, J.A.; Cano-García, J.M. Analysis of a Smartphone-Based Architecture with Multiple Mobility Sensors for Fall Detection. PLoS ONE 2016, 11, 1–17. [Google Scholar] [CrossRef] [PubMed]
- Sucerquia, A.; López, J.D.; Vargas-bonilla, J.F. SisFall: A Fall and Movement Dataset. Sensors 2017, 17, 198. [Google Scholar] [CrossRef] [PubMed]
- Micucci, D.; Mobilio, M.; Napoletano, P. UniMiB SHAR: A new dataset for human activity recognition using acceleration data from smartphones. IEEE Sens. Lett. 2016, 2, 15–18. [Google Scholar]
- Majumder, A.J.A.; Zerin, I.; Ahamed, S.I.; Smith, R.O. A multi-sensor approach for fall risk prediction and prevention in elderly. ACM SIGAPP Appl. Comput. Rev. 2014, 14, 41–52. [Google Scholar] [CrossRef]
- Yu, X. Approaches and principles of fall detection for elderly and patient. In Proceedings of the 10th International Conference on e-Health Networking, Applications and Services (HealthCom 2008), Singapore, 7–9 July 2008; pp. 42–47. [Google Scholar]
- Abbate, S.; Avvenuti, M.; Corsini, P.; Light, J.; Vecchio, A. Monitoring of Human Movements for Fall Detection and Activities Recognition in Elderly Care Using Wireless Sensor Network: A Survey; Tan, Y.K., Ed.; InTech: Rijeka, Croatia, 2010. [Google Scholar]
- Mehner, S.; Klauck, R.; Koenig, H. Location-independent fall detection with smartphone. In Proceedings of the ACM 6th International Conference on PErvasive Technologies Related to Assistive Environments (PETRA 2013), Rhodes Island, Greece, 29–31 May 2013; p. 11. [Google Scholar]
- Klenk, J.; Becker, C.; Lieken, F.; Nicolai, S.; Maetzler, W.; Alt, W.; Zijlstra, W.; Hausdorff, J.M.; Van Lummel, R.C.; Chiari, L. Comparison of acceleration signals of simulated and real-world backward falls. Med. Eng. Phys. 2011, 33, 368–373. [Google Scholar] [CrossRef] [PubMed]
- Kangas, M. Development of Accelerometry-Based Fall Detection; Oulu University: Oulu, Finland, 2011. [Google Scholar]
- Cleland, I.; Kikhia, B.; Nugent, C.; Boytsov, A.; Hallberg, J.; Synnes, K.; McClean, S.; Finlay, D. Optimal placement of accelerometers for the detection of everyday activities. Sensors 2013, 13, 9183–9200. [Google Scholar] [CrossRef] [PubMed]
- Maglogiannis, I.; Ioannou, C.; Spyroglou, G.; Tsanakas, P. Fall Detection Using Commodity Smart Watch and Smart Phone. In Artificial Intelligence Applications and Innovations; Maglogiannis, I.L., Papadopoulos, H., Sioutas, S., Makris, C., Eds.; Springer: Berlin, Germany, 2014; pp. 70–78. [Google Scholar]
- Casilari, E.; Oviedo-Jiménez, M.A. Automatic fall detection system based on the combined use of a smartphone and a smartwatch. PLoS ONE 2015, 10, e0140929. [Google Scholar] [CrossRef] [PubMed]
- Fang, S.-H.; Liang, Y.-C.; Chiu, K.-M. Developing a mobile phone-based fall detection system on android platform. In Proceedings of the Computing, Communications and Applications Conference (ComComAp), Hong Kong, China, 11–13 January 2012; BenLetaief, K., Zhang, Q., Eds.; pp. 143–146. [Google Scholar]
- Aguiar, B.; Rocha, T.; Silva, J.; Sousa, I. Accelerometer-based fall detection for smartphones. In Proceedings of the IEEE International Symposium on Medical Measurements and Applications (MeMeA), Lisbon, Portugal, 11–12 June 2014; pp. 1–6. [Google Scholar]
- Vogt, P.; Kuhn, J. Analyzing free fall with a smartphone acceleration sensor. Phys. Teach. 2012, 50, 182–183. [Google Scholar] [CrossRef]
- Mellone, S.; Tacconi, C.; Chiari, L. Validity of a Smartphone-based instrumented Timed Up and Go. Gait Posture 2012, 36, 163–165. [Google Scholar] [CrossRef] [PubMed]
- Albert, M.V.; Kording, K.; Herrmann, M.; Jayaraman, A. Fall classification by machine learning using mobile phones. PLoS ONE 2012, 7, e36556. [Google Scholar] [CrossRef] [PubMed]
- Fudickar, S.; Lindemann, A.; Schnor, B. Threshold-based Fall Detection on Smart Phones. In Proceedings of the 7th International Conference on Health Informatics (HEALTHINF’2014), Angers, France, 3–6 March 2014. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | Ref. | Authors | Institution | City (Country) | Year |
|---|---|---|---|---|---|
| DLR | [29] | Frank et al. | German Aerospace Center (DLR) | Munich (Germany) | 2010 |
| MobiFall MobiAct | [30] [31] | Vavoulas et al. | BMI Lab (Technological Educational Institute of Crete) | Heraklion (Greece) | 2013 2016 |
| TST Fall detection | [32] | Gasparrini et al. | TST Group (Universita Politecnica delle Marche) | Ancona (Italy) | 2014 |
| tFall | [33] | Medrano et al. | EduQTech (University of Zaragoza) | Teruel (Spain) | 2014 |
| UR Fall Detection | [34] | Kępski et al. | Interdisciplinary Centre for Computational Modelling (University of Rzeszow) | Krakow (Poland) | 2014 |
| Cogent Labs | [35] | Ojetola et al. | Cogent Labs (Coventry University) | Coventry (UK) | 2015 |
| Gravity Project | [36] | Vilarinho et al. | SINTEF ICT | Trondheim (Norway) | 2015 |
| Graz | [37] | Wertner et al. | Graz University of Technology | Graz (Austria) | 2015 |
| UMAFall | [38] | Casilari et al. | Dpto. Tecnología Electrónica (University of Málaga) | Málaga (Spain) | 2016 |
| SisFall | [39] | Sucerquia et al. | SISTEMIC. Univ. of Antioquia | Antioquia (Colombia) | 2017 |
| UniMiB SHAR | [40] | Micucci et al. | Department of Informatics, Systems and Communication (University of Milano) | Bicocca, Milan (Italy) | 2017 |
| Dataset | URL (Available on 28 March 2017) | File Type |
|---|---|---|
| DLR | http://www.dlr.de/kn/en/desktopdefault.aspx/tabid-8500/14564_read-36508/ | 2 Matlab files containing 1 matrix per subject and trial |
| MobiFall MobiAct | http://www.bmi.teicrete.gr/index.php/research/mobiact | 1 text file (with comma-separated values) per subject, activity and trial |
| TST Fall detection | http://www.tlc.dii.univpm.it/blog/databases4kinect | 1 binary file per subject, activity and trial |
| tFall | http://eduqtech.unizar.es/fall-adl-data/ | 1 file (extension .dat) with comma-separated values per subject, activity and trial |
| UR Fall Detection | http://fenix.univ.rzeszow.pl/~mkepski/ds/uf.html | 1 CSV file per subject, activity and trial |
| Cogent Labs | http://cogentee.coventry.ac.uk/datasets/fall_adl_data.zip | 1 text file (with comma-separated values) per subject including all the experiments |
| Gravity Project | https://github.com/SINTEF-SIT/project_gravity | 1 json file per subject, activity and trial |
| Graz | https://figshare.com/articles/Dataset_for_Mobile_Phone_Sensing_Based_Fall_Detection/1444405 | 1 SQLite database with 13 tables |
| UMAFall | https://figshare.com/articles/UMA_ADL_FALL_Dataset_zip/4214283 http://webpersonal.uma.es/de/ECASILARI/Fall_ADL_Traces/UMA_FALL_ADL_dataset.html | 1 CSV file per subject, activity and trial |
| SisFall | http://sistemic.udea.edu.co/en/investigacion/proyectos/english-falls/ | 1 text file (with comma-separated values) per subject and activity type (ADL or fall) |
| UniMiB SHAR | http://www.sal.disco.unimib.it/technologies/unimib-shar/ | 3 Matlab files with the traces, the activity label and name of the activity |
| Dataset | Number of Subjects (Female/Male) | Age (Years) | Weight (Kg) | Height (cm) | |||
|---|---|---|---|---|---|---|---|
| Range | μ ± σ | Range | μ ± σ | Range | μ ± σ | ||
| DLR 1,2 | 19 (8/11) | [23–52] | 30 ± 7.66 | n.i. | n.i. | [160–183] | 171.67 ± 8.23 |
| MobiFall | 24 (7/17) | [22–47] | 27.46 ± 5.26 | [50–103] | 76.42 ± 14.78 | [160–189] | 174.67 ± 7.51 |
| MobiAct | 57 (15/42) | [20–47] | 25.26 ± 4.24 | [50–120] | 76.60 ± 14.54 | [160–193] | 175.39 ± 7.39 |
| TST Fall detection | 11 (n.i.) | [22–39] | n.i. | n.i. | n.i. | [162–197] | n.i. |
| tFall | 10 (3/7) | [20–42] | 31.30 ± 8.60 | [54–98] | 69.20 ± 13.1 | [161–184] | 173.00 ± 8 |
| UR Fall Detection | 6 (0/6) 3 | n.i. (age over 26) | n.i. | n.i. | n.i. | n.i. | |
| Cogent Labs | 42 (6/36) | [18–51] | 24.12 ± 5.72 | [43–108] | 69.71 ± 13.08 | [150–187] | 172.24 ± 6.76 |
| Gravity Project | 2 (n.i.) 4 | [26–32] | 29 ± 4.24 | [63–80] | 71.5 ± 12.02 | [170–185] | 177.50 ± 10.61 |
| Graz | 5 (n.i.) | n.i. | n.i. | n.i. | n.i. | n.i. | n.i. |
| UMAFall | 17 (7/10) | [18–55] | 26.71 ± 10.47 | [50–93] | 69.88 ± 12.68 | [155–195] | 171.53 ± 9.37 |
| SisFall | 38 (19/19) | [19–75] | 40.16 ± 21.33 | [41.5–102] | 62.30 ± 12.63 | [149–183] | 164.05 ± 9.27 |
| UniMiB SHAR | 30 (24/6) | [18–60] | 27 ± 11 | [50–82] | 64.40 ± 9.7 | [160–190] | 169.00 ± 7 |
| Dataset | Scenario of the Experiment | Spontaneity of the Movements | Use of Mattress to Cushion the Falls | Video Clips |
|---|---|---|---|---|
| DLR | Real life indoor (meeting in an office, etc.) and outdoor scenarios (forest, bus stop) | Semi-naturalistic conditions | No | Yes |
| MobiFall MobiAct | Gym Hall Not described | Predefined | Yes (5 cm-thick mattress) | No |
| TST Fall detection | Office or lab | Predefined | Yes | Yes (blurred) |
| tFall | One week of everyday behavior (ADLs) | Naturalistic conditions (ADL) Predefined (falls) | Use of compensation strategies to prevent the fall | No |
| UR Fall Detection | Office & Home environment | Predefined | No | Yes |
| Cogent Labs | Office | Predefined 1 | Yes | No |
| Gravity Project | Not commented | Predefined | Yes (1 cm fitline mattress, and soft 5.5 cm-thick mattress on top of a 3.5 cm martial arts mattress) | No |
| Graz | Gym Hall | Predefined | No (wooden floor) | No |
| UMAFall | Home environment | Predefined | Yes | Yes |
| SisFall | Gym Hall | Predefined | Yes | Yes |
| UniMiB SHAR | Not commented | Predefined | Not commented | No |
| Dataset | Number of Types of ADLs/Falls | Number of Samples (ADLs/Falls) | Duration of the Samples (s) | ||
|---|---|---|---|---|---|
| [Minimum–Maximum] | Mean | Median | |||
| DLR | 15/1 | 1017 (961/56) | [0.27–864.33] s | 18.40 s | 9.46 s |
| MobiFall | 9/4 | 630 (342/288) | [0.27–864.33] s | 18.40 s | 9.46 s |
| MobiAct | 9/4 | 2526 (1879/647) | [4.89–300.01] s | 22.35 s | 9.85 s |
| TST Fall detection | 4/4 | 264 (132/132) | [3.84–18.34] s | 8.60 s | 8.02 s |
| tFall | Not typified/8 | 10,909 (9883/1026) | 6 s (all samples) | 6 s | 6 s |
| UR Fall Detection | 5/4 | 70 (40/30) | [2.11–13.57] s | 5.95 s | 5.256 s |
| Cogent Labs | 8/6 | 1968 (1520/448) | [0.53–55.73] s | 13.15 s | 12.79 s |
| Project Gravity | 7/12 | 117 (45/72) | [9.00–86.00] s | 27.53 s | 23.00 s |
| Graz | 10/4 | 2460 (2240/220) | [0.18–961.23] s | 12.67 s | 4.32 s |
| UMAFall | 8/3 | 531 (322/209) | 15 s (all samples) | 15 s | 15 s |
| SisFall | 19/15 | 4505 (2707/1798) | [9.99–179.99] s | 17.60 s | 14.99 s |
| UniMiB SHAR | 9/8 | 7013 (5314/1699) | 1 s (all samples) | 1 s | 1 s |
| Dataset | Activities of Daily Living (ADLs) | Near Falls | Falls | ||||
|---|---|---|---|---|---|---|---|
| Simple Movements | Standard Normal Life Movements | Sporting Activities | |||||
| DLR |
|
|
|
| |||
| MobiFall & MobiAct |
|
|
|
| |||
| TST Fall detection |
|
|
| ||||
| tFall |
|
|
| ||||
| UR Fall Detection |
|
|
|
| |||
| Cogent Labs |
|
|
|
|
|
| |
| Gravity Project |
|
|
|
| |||
| Graz |
|
|
| ||||
| UMAFall |
|
|
|
| |||
| SisFall |
|
|
|
|
| ||
| UniMiB SHAR |
|
|
|
| |||
| Dataset | Number of Sensing Points | Number of Magnitudes Recorded Per Sensing Point | Recorded Magnitudes | Positions of the Sensing Points |
|---|---|---|---|---|
| DLR | 1 | 3 | A, G, M | Waist (belt) |
| MobiFall & MobiAct | 1 | 3 | A, G, O | Thigh (trouser pocket) |
| TST Fall detection | 2 | 1 | A | Waist Right wrist |
| tFall | 1 | 1 | A | Alternatively: Thigh (right or left pocket) Hand bag (left or right side) |
| UR Fall Detection | 1 | 1 | A | Waist (near the pelvis) |
| Cogent Labs | 2 | 2 | A, G | Chest Thigh |
| Gravity Project | 1 or 2 * | 1 | A | Thigh (smartphone in a pocket) Wrist (smartwatch) |
| Graz | 1 | 2 | A, O | Waist (belt bag) |
| UMAFall | 5 | 3 | A, G, M ** | Ankle Chest Thigh (right trouser pocket) Waist Wrist |
| SisFall | 1 | 3 | A, A, G *** | Waist |
| UniMiB SHAR | 1 | 1 | A | Thigh (left or right trouser pocket) |
| Dataset | Type of Sensor | Model | Sampling Rate (Hz) | Presumed Range | Minimun & Maximum Values in the Traces | Resolution |
|---|---|---|---|---|---|---|
| DLR | 1 external IMU | Xsens MTx (Enschede, The Netherlands) | 100 | ±5 g (A) ±1200°/s (G) ±75 μT (M) | [−6.3958–6.5584] g [−14.35–15.39] °/s [−2.9179–3.0207] μT | 16 bits (A) 16 bits (G) 16 bits (M) |
| MobiFall & MobiAct | 1 smartphone | Samsung Galaxy S3 (Seul, Korea) (LSM330DLC IMU) (STMicroelectronics, Geneva, Switzerland) | 87 (A) 100 (G,O) | ±2 g (A) ±2000°/s (G) ±360° (O) | [−1.9951–1.999] g [−573.44–573.42] °/s [−179.9995–360] ° | 12 bits (A) 1 16 bits (G) 1 |
| TST Fall detection | 2 external IMUs | Shimmer device (Dublin, Ireland) | 100 | ±8 g (A) | [−5.4973, 5.5054] g | 16 bits |
| tFall | 1 smartphone | Samsung Galaxy Mini (Seul, Korea) | 45 (±12) | ±2 g (A) | [−2.0303–2.082] g | 20 bits 1 |
| UR Fall Detection | 1 external IMU | x-io x-IMU (Bristol, UK) | 256 | ±8 g (A) | [−8.0493–8.0191] g | 12 bits |
| Cogent Labs | 2 external IMUs | Shimmer device (Dublin, Ireland) | 100 | ±8 g (A) ±2000°/s (G) | [−5.3279–5.8552] g [−714.02–721.71] °/s | 16 bits 16 bits |
| Gravity Project | 1 smartphone 1 smartwatch | Samsung Galaxy S3 (Seul, Korea) LG G Watch (Seul, Korea) | 50 | ±2 g (A) ±16 g (A) | 2.39 g (SVM) 2 14.8 g (SMV) 2 | 36 bits 1 |
| Graz | 1 smartphone 3 | Samsung Galaxy S5 (Seul, Korea) mini Samsung Galaxy S5 (Seul, Korea) Google Nexus 4 (LG, Seul, Korea) Google Nexus 5 (LG, Seul, Korea) Sony Xperia Z3 (Tokyo, Japan) | 5 | ±2 g (A) ±360° (O) | [−2.2838–2.4655] g [−2.9463–2.9754] g [−2.4937–2.6053] g [−2.7741–2.7799] g [−2.3516–2.4218] g [−18.35–36.70] ° (all models) | 36 bits 1 |
| UMAFall | 1 Smartphone 4 4 external IMUs | Samsung Galaxy S5 (Seul, Korea) (InvenSense MPU-6500) LG G4 (Seul, Korea) (Bosch Accelerometer) (Gerlingen, Germany) Texas Instruments SensorTag (Dallas, TX, USA) (InveSense MPU-9250) (San Jose, CA, USA) | 100 20 | ±2 g (A) ±16 g (A) ±8 g (A) ±256°/s (G) ±4800 μT (M) | [−1.9999–1.999] g [−4.0444–4.0378] g [−7.9373–8] g [−256.78–254.81] °/s [−190.83–100.67] μT | 16 bits 16 bits 16 bits 16 bits 14 bits |
| SisFall | 1 external sensing mote with two accelerometers (A1&A2) and a gyroscope | Self-developed prototype: A1: Analog Device ADXL345 (Norwood, MA, USA) A2: NXP MMA8451Q (Eindhoven, The Netherlands), ITG3200 gyroscope (Texas Instruments, Dallas, Texas, USA) | 200 | ±16 g (A1) ±8 g (A2) ±2000°/s (G) | [−16–15.99] g [−8–7.999] g [−1971.7–1999.9] °/s | 13 bits 14 bits 16 bits |
| UniMiB SHAR | 1 smartphone | Samsung Galaxy Nexus (Seul, Korea) | 50 | ±2 g (A) | [−2.0001–2.0001] | 52 bits 1 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Casilari, E.; Santoyo-Ramón, J.-A.; Cano-García, J.-M. Analysis of Public Datasets for Wearable Fall Detection Systems. Sensors 2017, 17, 1513. https://doi.org/10.3390/s17071513
Casilari E, Santoyo-Ramón J-A, Cano-García J-M. Analysis of Public Datasets for Wearable Fall Detection Systems. Sensors. 2017; 17(7):1513. https://doi.org/10.3390/s17071513
Chicago/Turabian StyleCasilari, Eduardo, José-Antonio Santoyo-Ramón, and José-Manuel Cano-García. 2017. "Analysis of Public Datasets for Wearable Fall Detection Systems" Sensors 17, no. 7: 1513. https://doi.org/10.3390/s17071513
APA StyleCasilari, E., Santoyo-Ramón, J. -A., & Cano-García, J. -M. (2017). Analysis of Public Datasets for Wearable Fall Detection Systems. Sensors, 17(7), 1513. https://doi.org/10.3390/s17071513