Experimental Demonstration of Long-Range Underwater Acoustic Communication Using a Vertical Sensor Array

Abstract
:1. Introduction
2. Theory of UWA Communication Using CCVTRM
2.1. Principles of Signal Coding
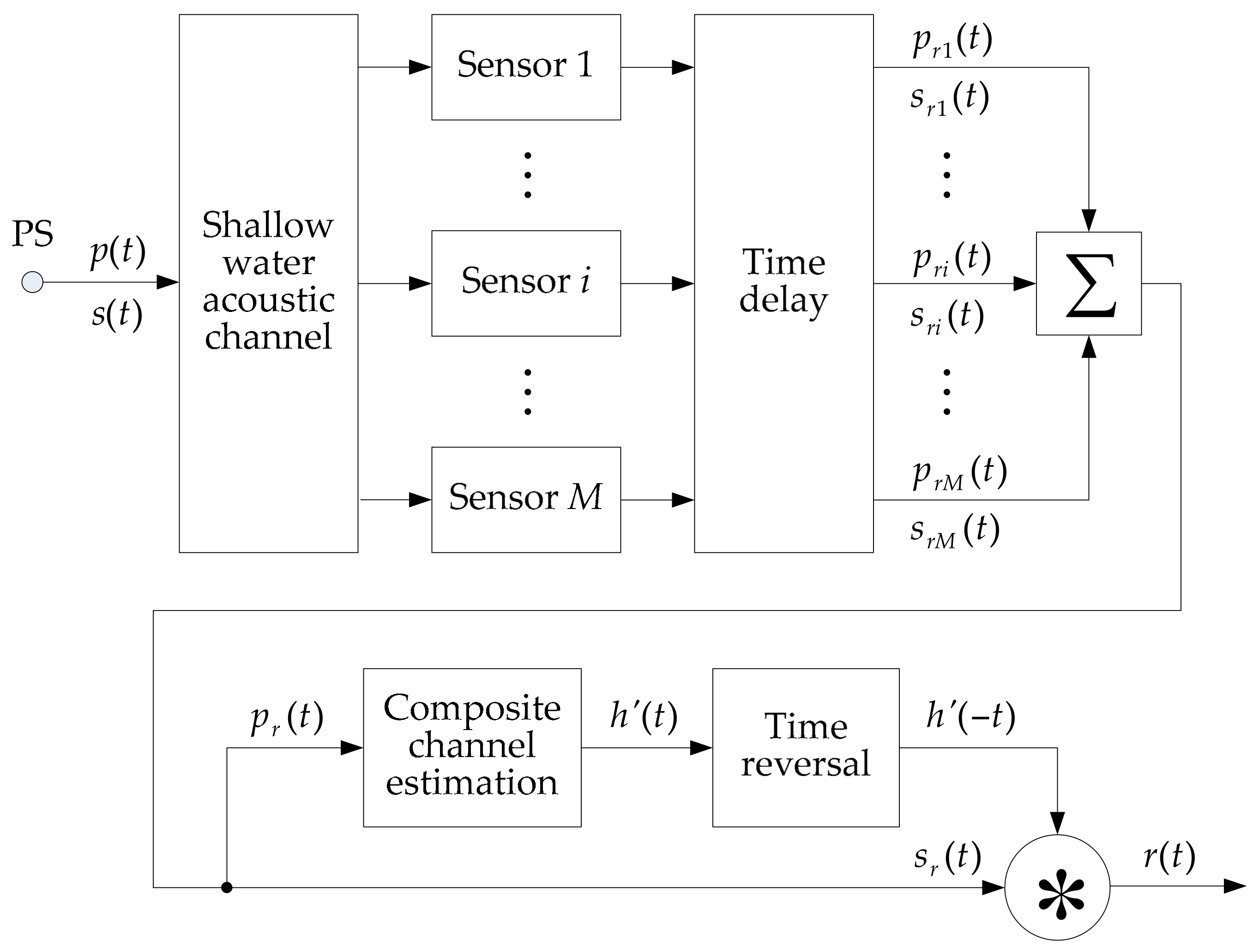
2.2. Principles of CCVTRM
2.3. Principles of Detection and Channel Estimation
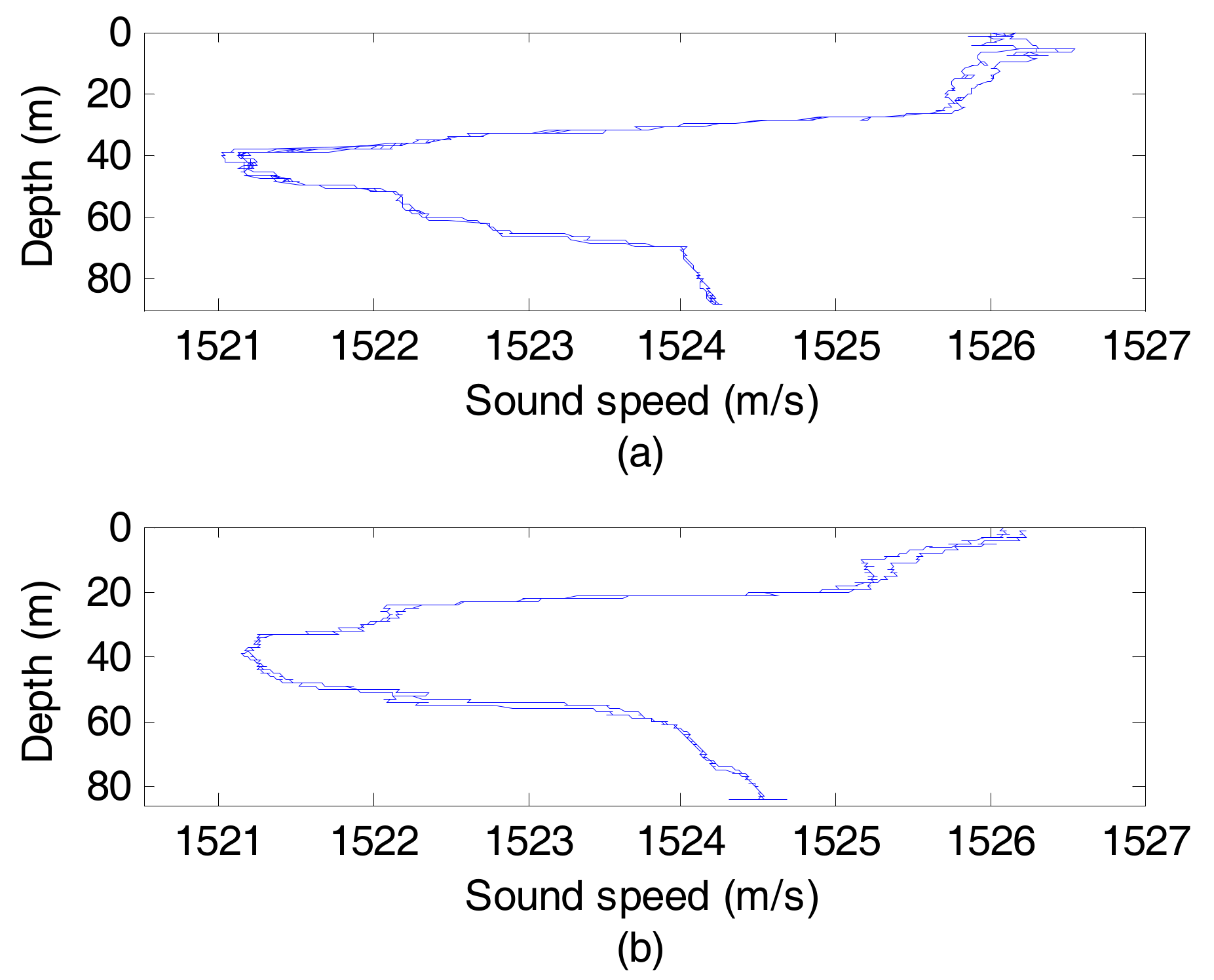
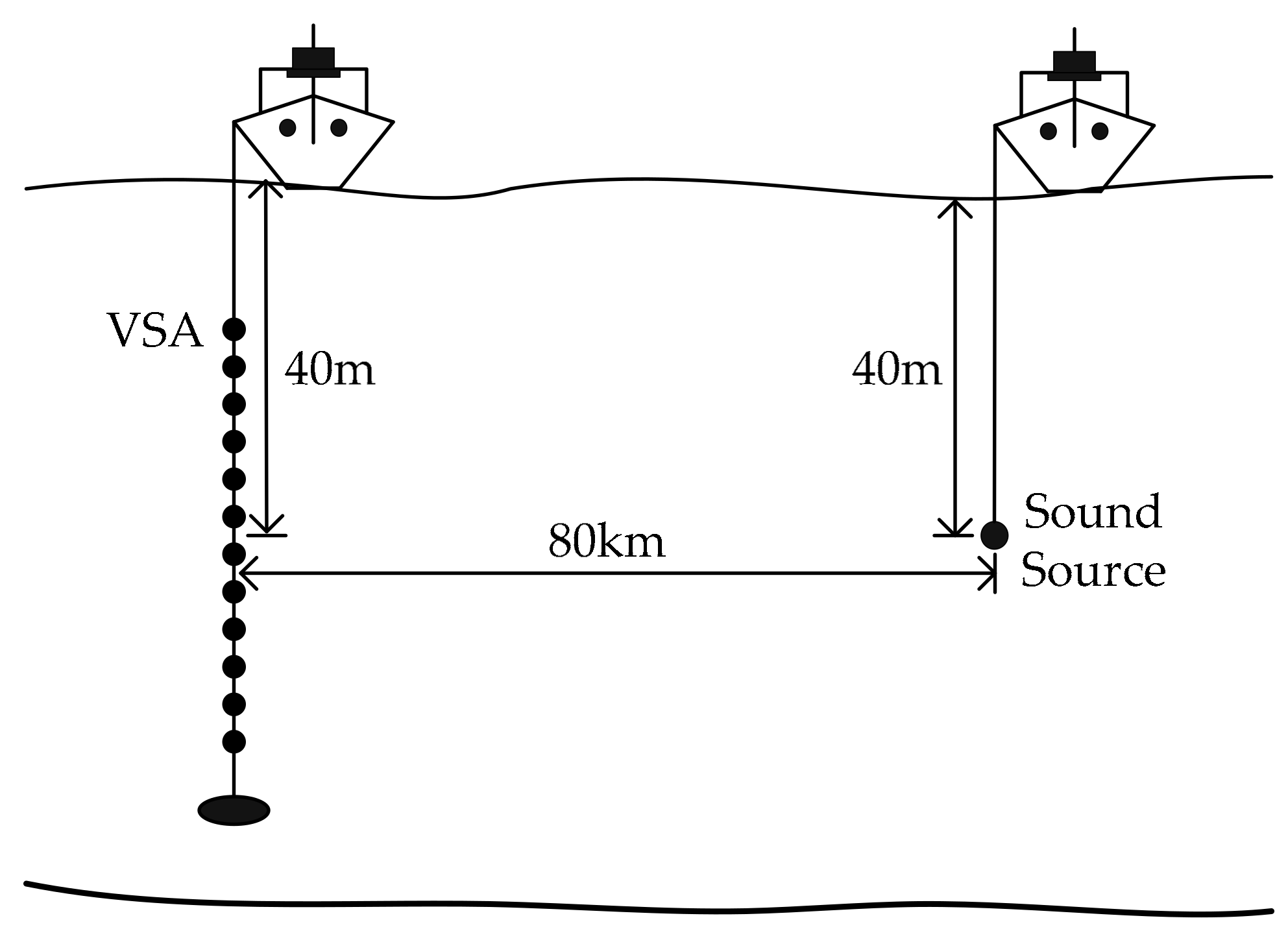
3. Sea Experiment
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Urick, R.J. Principles of Underwater Sound; Harbin Shipbuilding Engineering Institute Press: Harbin, China, 1990; pp. 127–145. [Google Scholar]
- Kuperman, W.A.; Hodgkiss, W.S.; Song, H.C.; Akai, T.; Ferla, C.; Jackson, D.R. Phase conjugation in the ocean: experimental demonstration of an acoustic time-reversal mirror. J. Acoust. Soc. Am. 1998, 103, 25–40. [Google Scholar] [CrossRef]
- Jackson, D.R.; Dowling, D.R. Phase conjugation in underwater acoustics. J. Acoust. Soc. Am. 1991, 89, 171–181. [Google Scholar] [CrossRef]
- Dowling, D.R. Acoustic pulse compression using passive phase-conjugate processing. J. Acoust. Soc. Am. 1994, 95, 1450–1458. [Google Scholar] [CrossRef]
- Dungan, M.R.; Dowling, D.R. Computed narrow-band azimuthal time-reversing array retrofocusing in shallow water. J. Acoust. Soc. Am. 2001, 110, 1931–1942. [Google Scholar] [CrossRef] [PubMed]
- Dungan, M.R.; Dowling, D.R. Orientation effects on linear time-reversing array retrofocusing in shallow water. J. Acoust. Soc. Am. 2002, 112, 1842–1852. [Google Scholar] [CrossRef] [PubMed]
- Khosla, S.R.; Dowling, D.R. Time-reversing array retrofocusing in noisy environments. J. Acoust. Soc. Am. 2001, 109, 538–546. [Google Scholar] [CrossRef]
- Sabra, K.G.; Khosla, S.R.; Dowling, D.R. Broadband time-reversing array retrofocusing in noisy environments. J. Acoust. Soc. Am. 2002, 111, 823–830. [Google Scholar] [CrossRef] [PubMed]
- Edelmann, G.F.; Akal, T.; Hodgkiss, W.S.; Kim, S.; Kuperman, W.A.; Song, H.C. An initial demonstration of underwater acoustic communication using time reversal. IEEE J. Ocean. Eng. 2002, 27, 602–609. [Google Scholar] [CrossRef]
- Smith, K.B.; Abrantes, A.A.M.; Larraza, A. Examination of time-reversal acoustics in shallow water and applications to noncoherent underwater communications. J. Acoust. Soc. Am. 2003, 113, 3095–3110. [Google Scholar] [CrossRef] [PubMed]
- Song, H.C.; Hodgkiss, W.S.; Kuperman, W.A.; Stevenson, M.; Akal, T. Improvement of time-reversal communications using adaptive channel equalizers. IEEE J. Ocean. Eng. 2006, 31, 487–496. [Google Scholar] [CrossRef]
- Edelmann, G.F.; Song, H.C.; Kim, S.; Hodgkiss, W.S.; Kuperman, W.A.; Akal, T. Underwater acoustic communications using time reversal. IEEE J. Ocean. Eng. 2005, 30, 852–864. [Google Scholar] [CrossRef]
- Yang, T.C. Temporal resolutions of time-reversal and passive-phase conjugation for underwater acoustic communications. IEEE J. Ocean. Eng. 2003, 28, 229–245. [Google Scholar] [CrossRef]
- Rouseff, D.; Jackson, D.R.; Fox, W.L.J.; Jones, C.D.; Ritcey, J.A.; Dowling, D.R. Underwater acoustic communication by passive-phase conjugation: Theory and experimental results. IEEE J. Ocean. Eng. 2001, 26, 821–831. [Google Scholar] [CrossRef]
- Flynn, J.A.; Ritcey, J.A.; Rouseff, D.; Fox, W.L.J. Multichannel equalization by decision-directed passive phase conjugation: experimental results. IEEE J. Ocean. Eng. 2004, 29, 824–836. [Google Scholar] [CrossRef]
- Yang, T.C. Differences between passive-phase conjugation and decision-feedback equalizer for underwater acoustic communications. IEEE J. Ocean. Eng. 2004, 29, 472–487. [Google Scholar] [CrossRef]
- Song, H.C.; Hodgkiss, W.S.; Kuperman, W.A.; Higley, W.J.; Raghukumar, K.; Akal, T.; Stevenson, M. Spatial diversity in passive time reversal communications. J. Acoust. Soc. Am. 2006, 120, 2067–2076. [Google Scholar] [CrossRef]
- Song, H.C.; Howe, B.M.; Brown, M.G.; Andrew, R.K. Diversity-based acoustic communication with a glider in deep water. J. Acoust. Soc. Am. 2014, 135, 1023–1026. [Google Scholar] [CrossRef] [PubMed]
- Song, H.C.; Hodgkiss, W.S. Self-synchronization and spatial diversity of passive time reversal communication. J. Acoust. Soc. Am. 2015, 137, 2974–2977. [Google Scholar] [CrossRef] [PubMed]
- Shimura, T.; Ochi, H.; Song, H.C. Experimental demonstration of multiuser communication in deep water using time reversal. J. Acoust. Soc. Am. 2013, 134, 3223–3229. [Google Scholar] [CrossRef] [PubMed]
- Song, A.; Badiey, B.; McDonald, V.K.; Yang, T.C. Time reversal receivers for high data rate acoustic multiple-input-multiple-output communication. IEEE J. Ocean. Eng. 2011, 36, 525–538. [Google Scholar] [CrossRef]
- Cho, S.E.; Song, H.C.; Hodgkiss, W.S. Multiuser acoustic communications with mobile users. J. Acoust. Soc. Am. 2013, 133, 880–890. [Google Scholar] [CrossRef] [PubMed]
- Song, H.C. An overview of underwater time-reversal communication. IEEE J. Ocean. Eng. 2016, 41, 644–655. [Google Scholar] [CrossRef]
- Hui, J.Y.; Liu, L.; Liu, H.; Feng, H.H. A study on pattern time delay coding underwater acoustic communication. Acta Acust. 1999, 24, 561–573. [Google Scholar]
- Yin, J.W.; Hui, J.Y.; Hui, J.; Yao, Z.X.; Wang, Y.L. Underwater acoustic communication based on pattern time delay shift coding scheme. Ocean Eng. 2006, 20, 499–508. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
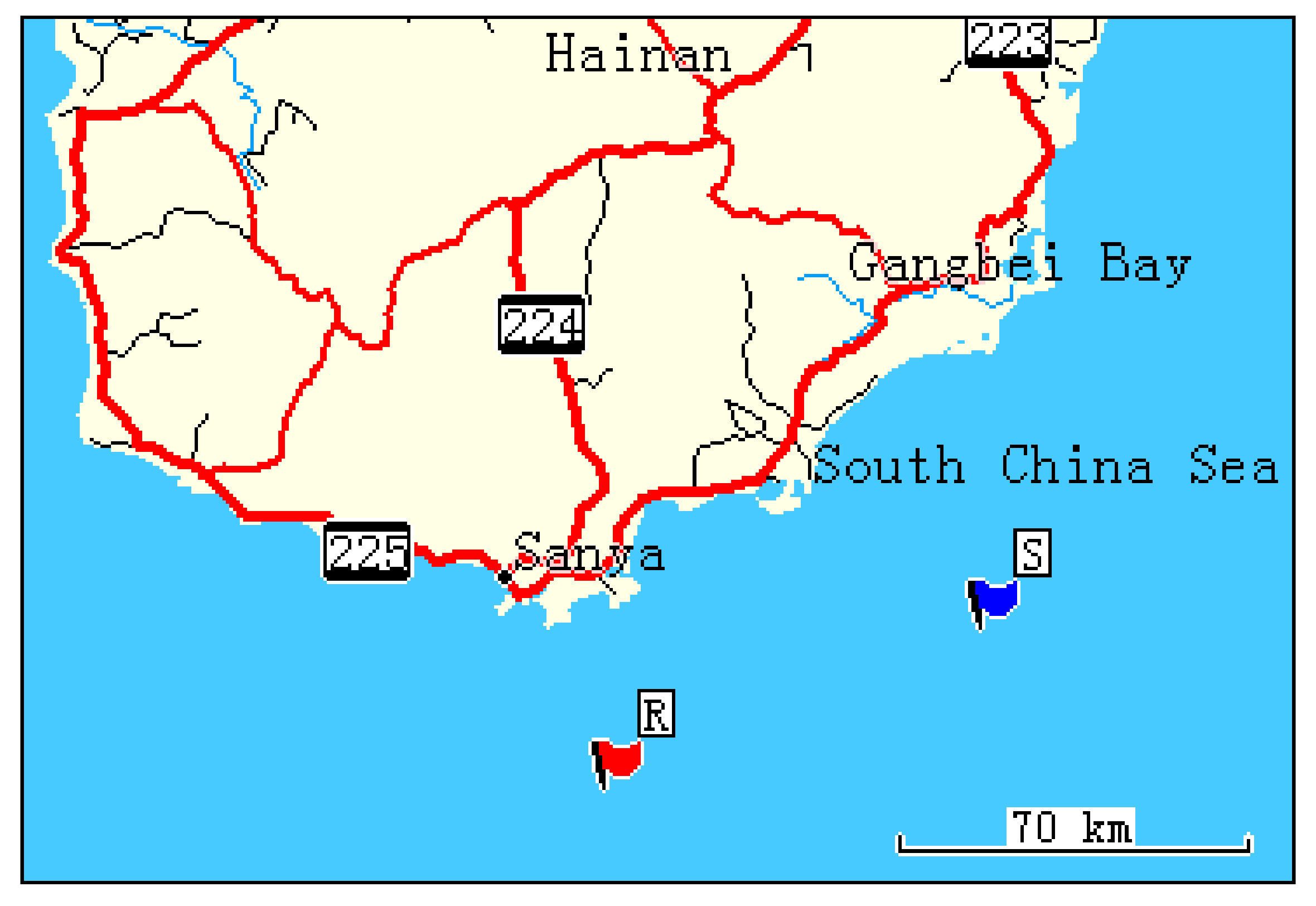
| The Test Point | Latitude | Longitude |
|---|---|---|
| S | 18°12′48″ N | 110°25′16″ E |
| R | 17°55′25″ N | 109°41′58″ E |
| Tp (ms) | Tc (ms) | Communication Rate (bit/s) |
|---|---|---|
| 8 | 12 | 200 |
| 16 | 24 | 100 |
| 24 | 36 | 66.7 |
| 32 | 48 | 50 |
| 40 | 60 | 40 |
| 80 | 120 | 20 |
| Communication Rate (bit/s) | BER(%) | |
|---|---|---|
| NO CCVTRM | CCVTRM | |
| 200 | 42.35 | 16.84 |
| 100 | 21.43 | 3.57 |
| 66.7 | 15.31 | 0 |
| 50 | 7.65 | 0 |
| 40 | 4.08 | 0 |
| 20 | 1.53 | 0 |
| Communication Rate (bit/s) | BER(%) | ||||||
|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | |
| 200 | 16.84 | 25.00 | 17.35 | 16.33 | 15.82 | 17.86 | 21.43 |
| 100 | 3.57 | 5.61 | 1.53 | 2.04 | 3.57 | 4.08 | 4.59 |
| 66.7 | 0 | 0 | 0.51 | 0 | 0 | 0 | 0 |
| 50 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 40 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 20 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, A.; Zeng, C.; Hui, J.; Ma, L.; Bi, X. Experimental Demonstration of Long-Range Underwater Acoustic Communication Using a Vertical Sensor Array. Sensors 2017, 17, 1516. https://doi.org/10.3390/s17071516
Zhao A, Zeng C, Hui J, Ma L, Bi X. Experimental Demonstration of Long-Range Underwater Acoustic Communication Using a Vertical Sensor Array. Sensors. 2017; 17(7):1516. https://doi.org/10.3390/s17071516
Chicago/Turabian StyleZhao, Anbang, Caigao Zeng, Juan Hui, Lin Ma, and Xuejie Bi. 2017. "Experimental Demonstration of Long-Range Underwater Acoustic Communication Using a Vertical Sensor Array" Sensors 17, no. 7: 1516. https://doi.org/10.3390/s17071516
APA StyleZhao, A., Zeng, C., Hui, J., Ma, L., & Bi, X. (2017). Experimental Demonstration of Long-Range Underwater Acoustic Communication Using a Vertical Sensor Array. Sensors, 17(7), 1516. https://doi.org/10.3390/s17071516