Establishment of a Site-Specific Tropospheric Model Based on Ground Meteorological Parameters over the China Region

 ,
,
Abstract
:1. Introduction
2. Basic Theory and Models for Tropospheric Delay
2.1. Tropospheric Delay
2.2. Tropospheric Models
2.2.1. Saastamoinen Model
2.2.2. GPT2w Model
2.2.3. Callahan Model
2.2.4. SAAS_S Model
3. Data and Methods
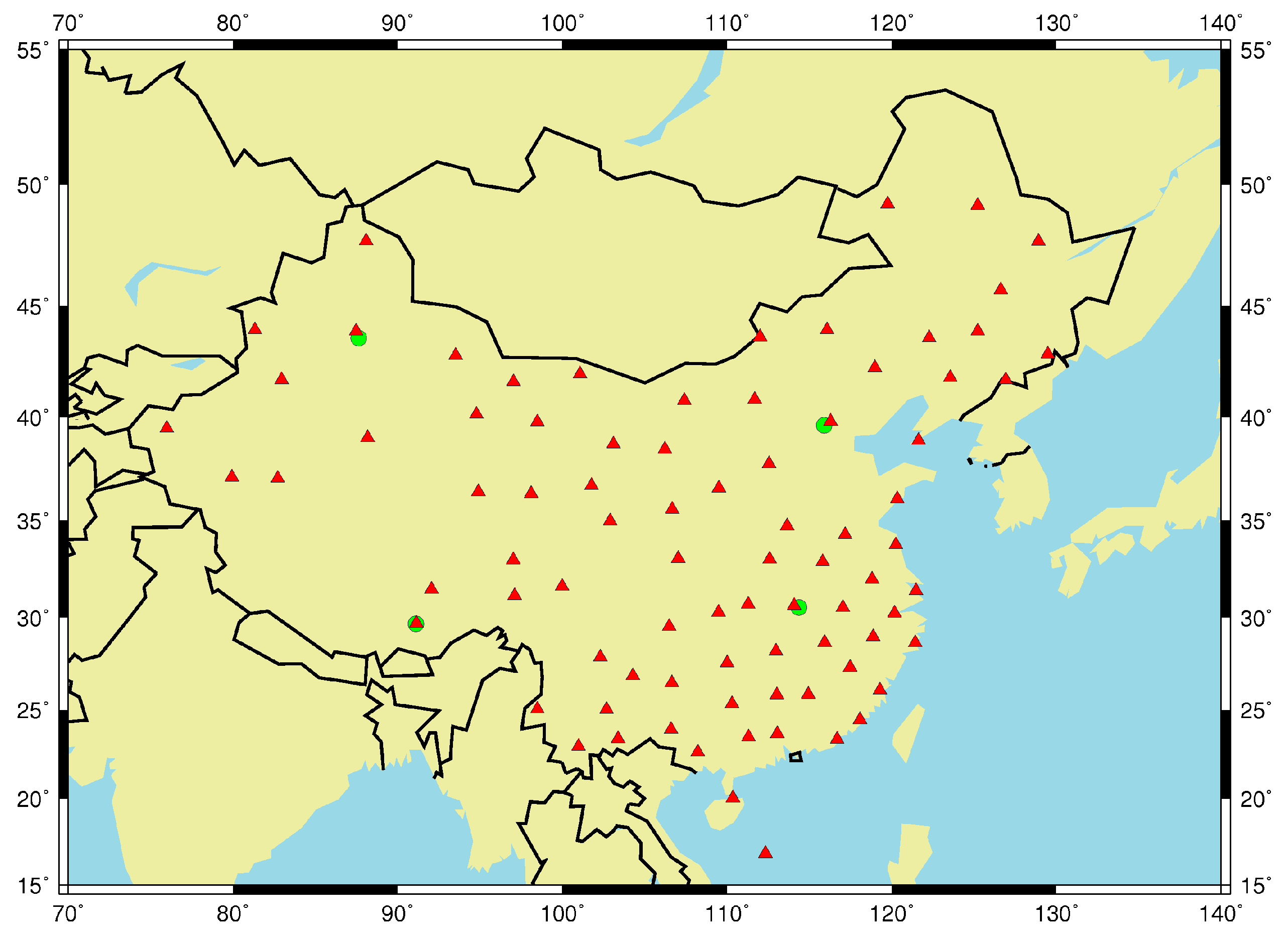
3.1. Description of Radiosonde Data and IGS Data
3.2. Model Processing
4. Results
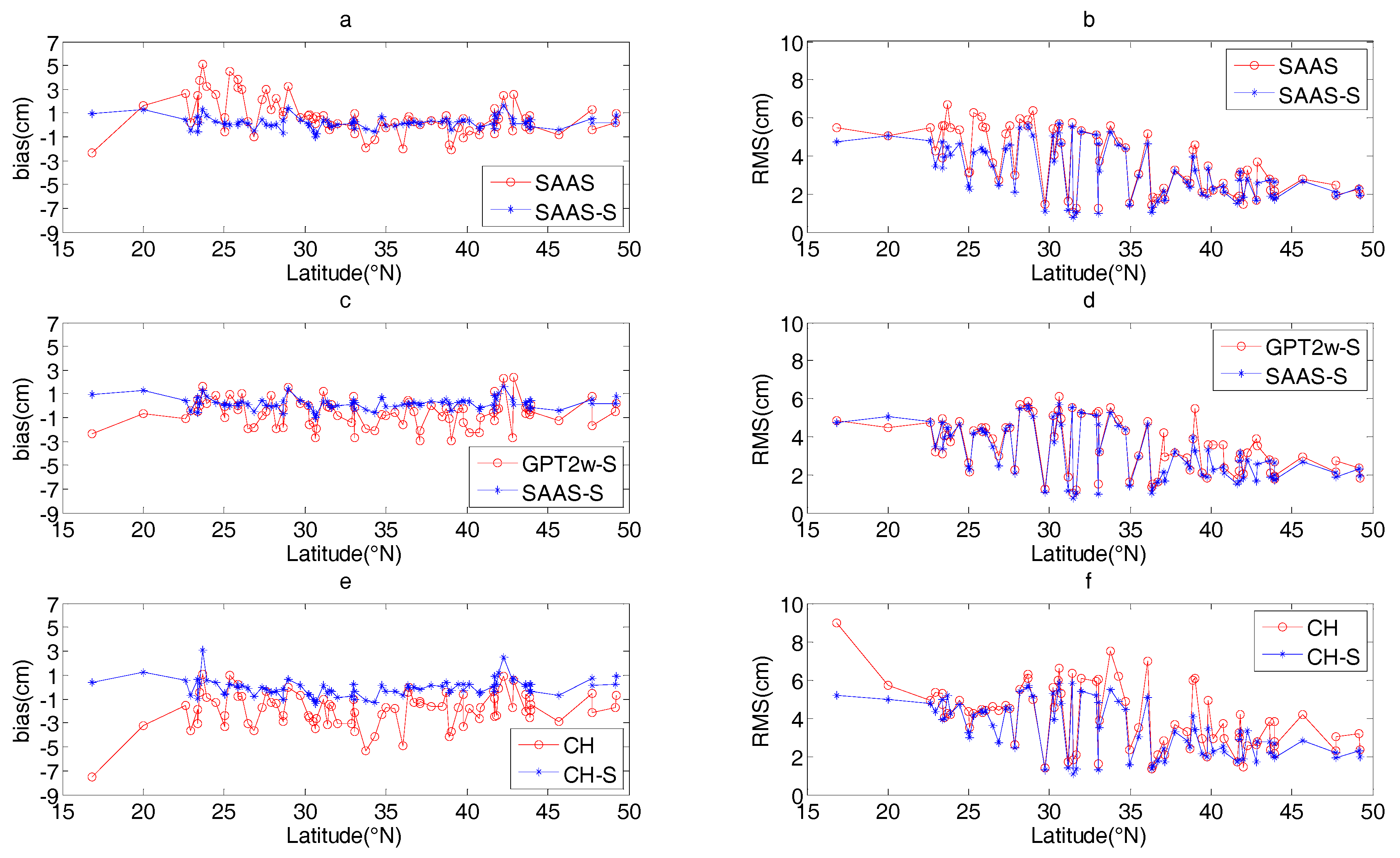
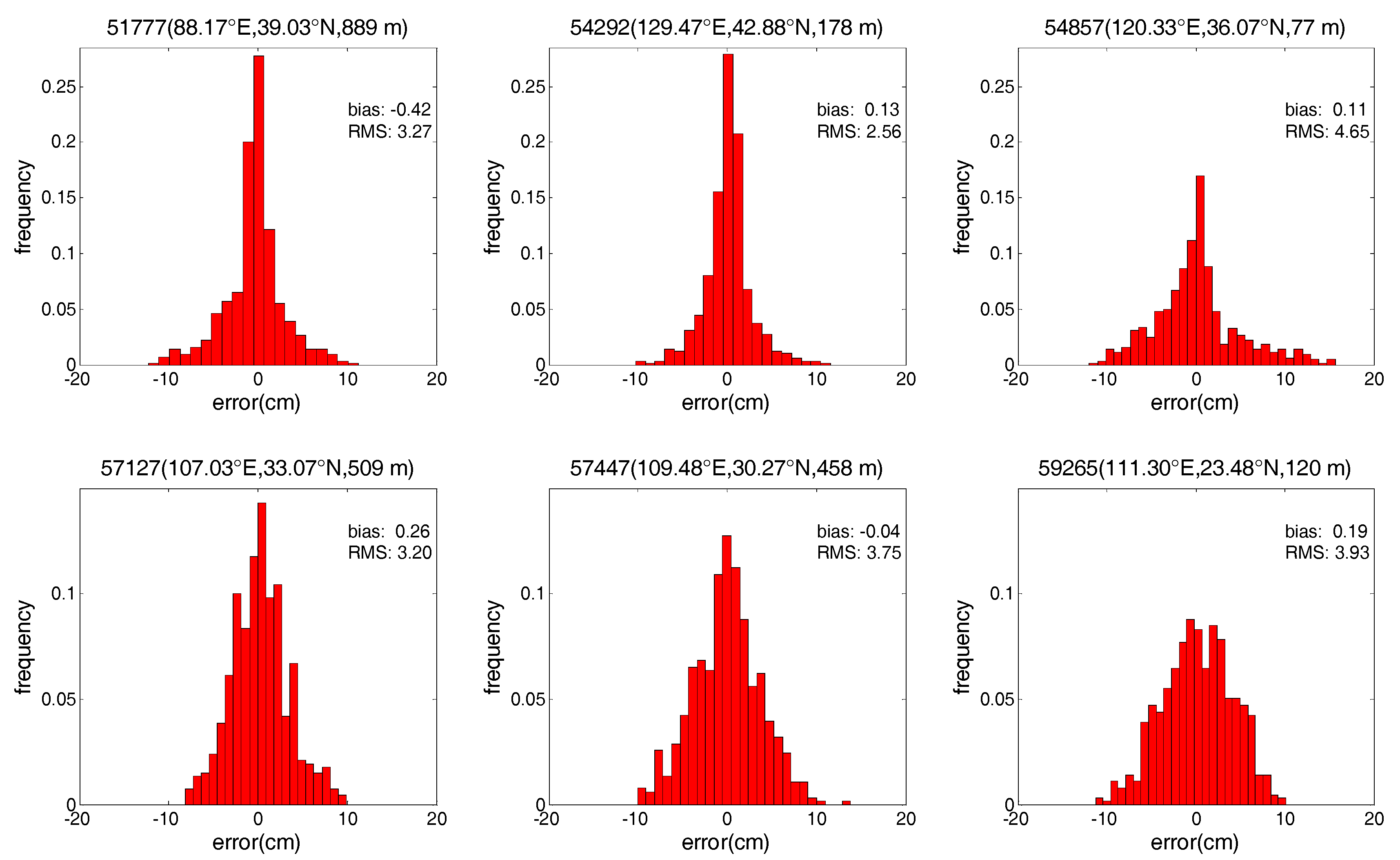
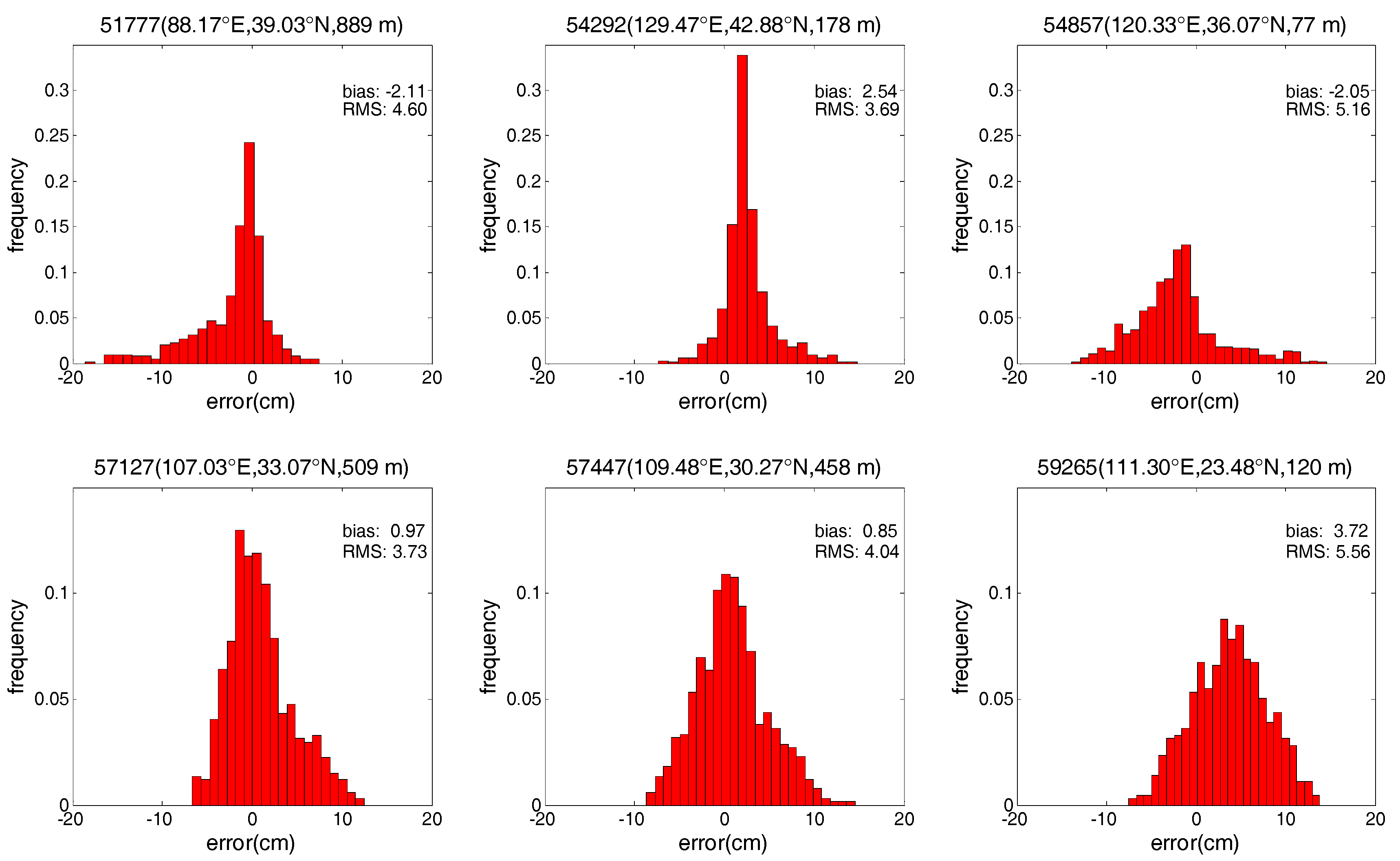
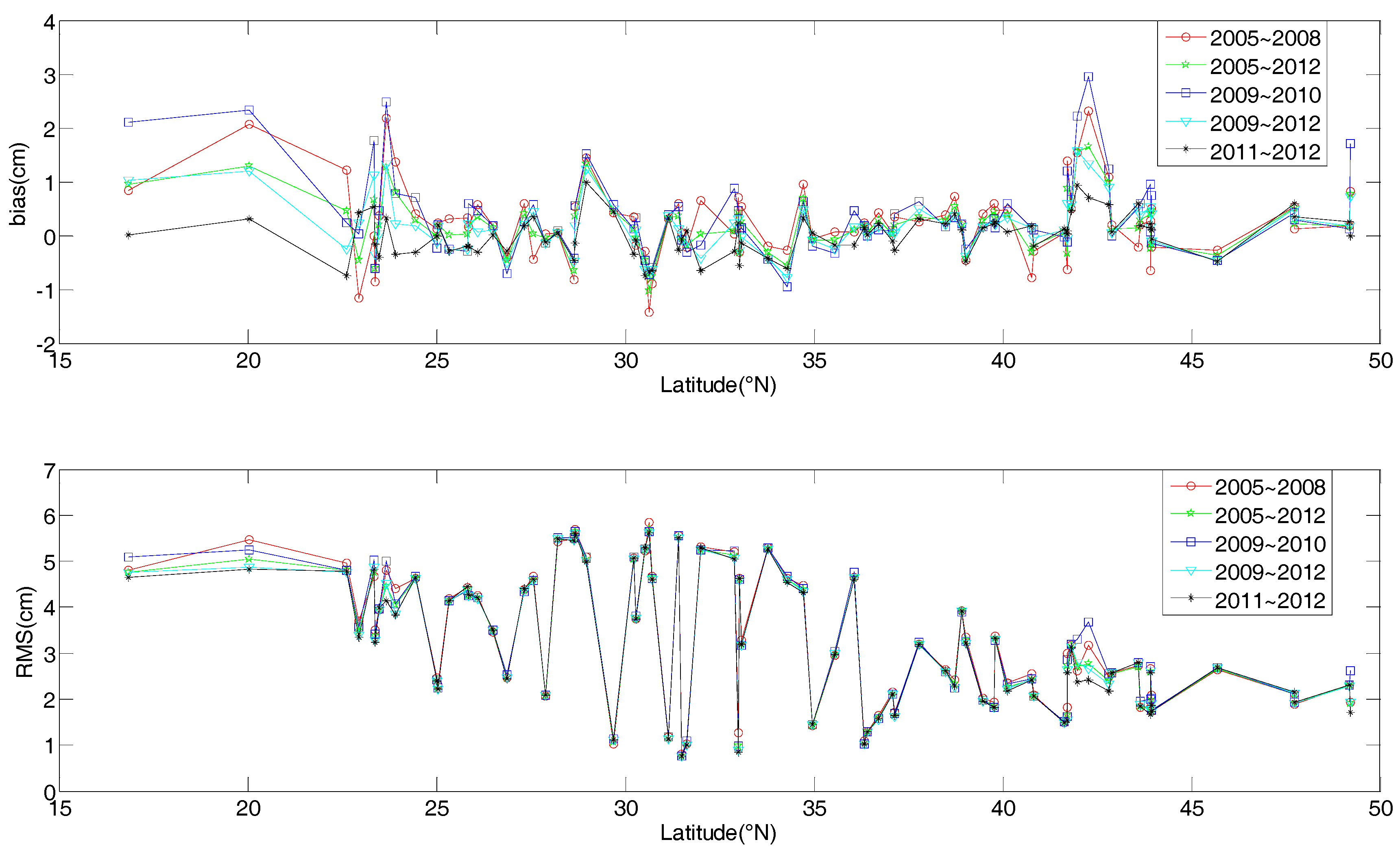
4.1. Validation with Radiosonde Data
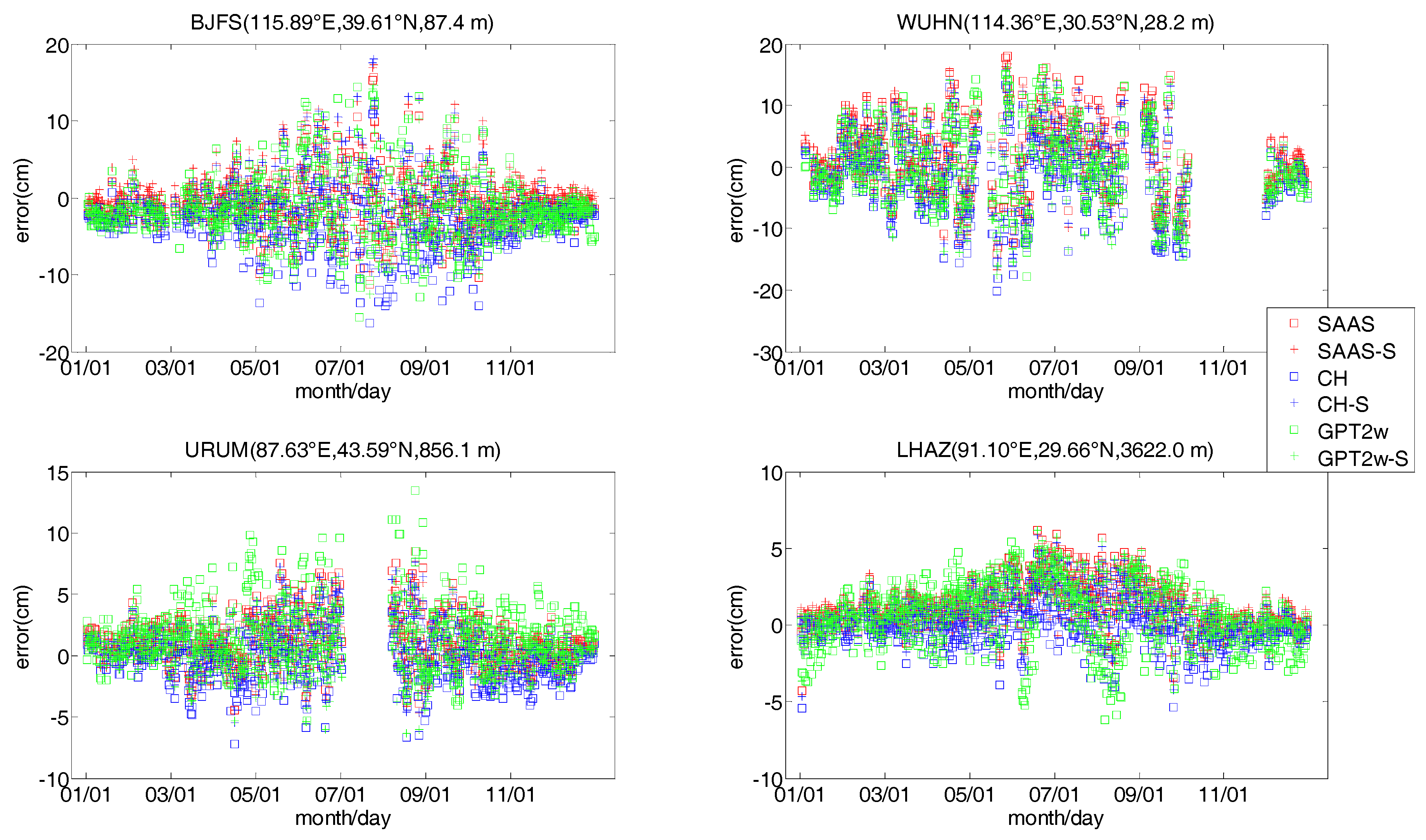
4.2. Validation with GNSS-ZTD Data
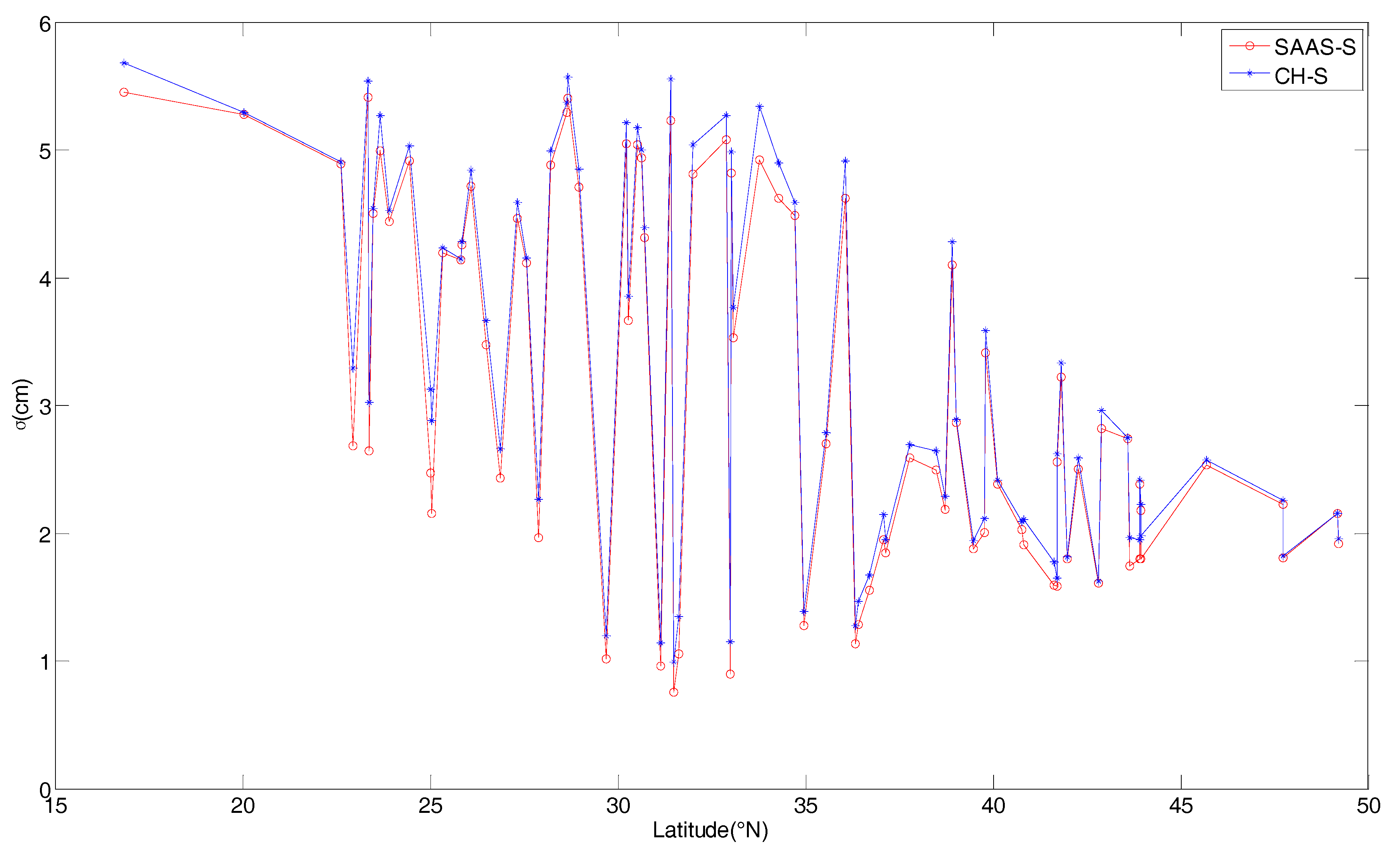
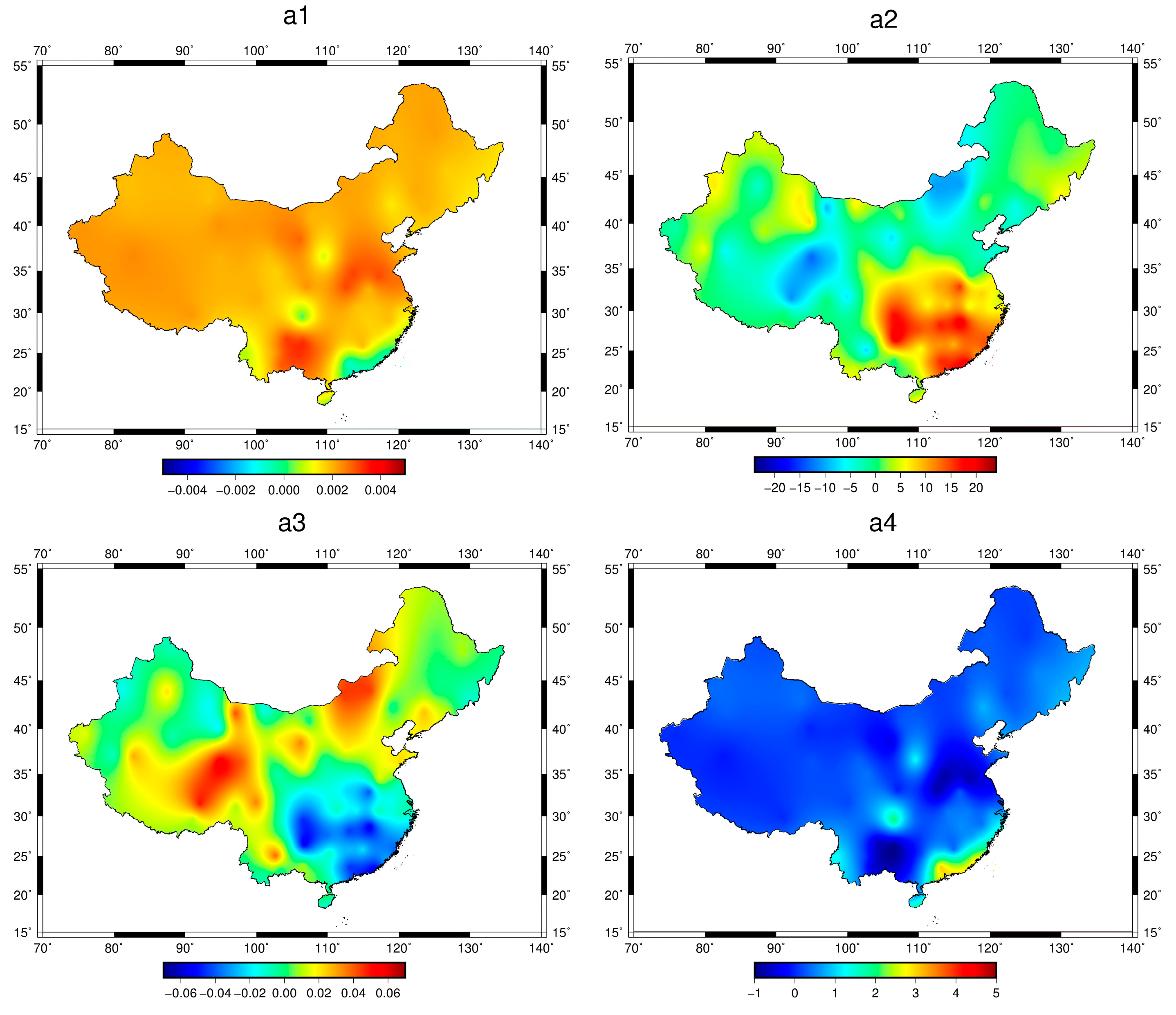
4.3. Characteristics of the SAAS_S Model Coefficients
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Huang, L. Research on the Models and Methods of Zenith Tropospheric Delay Correction Using Ground-Based GNSS; Guilin University of Technology: Gulin, China, 2014. [Google Scholar]
- Pace, B.; Pacione, R.; Sciarretta, C.; Bianco, G. Computation of zenith total delay correction fields using ground-based GNSS. Int. Assoc. Geod. Symp. 2015, 142, 131–137. [Google Scholar] [CrossRef]
- Yin, H.; Huang, D.; Xiong, Y. New model for tropopheric delay estimation of GPS signal. Geomat. Inf. Sci. Wuhan Univ. 2007, 32, 454–457. [Google Scholar]
- Bean, B.; Dutton, E. Radio Meteorology; Dover Publications: New York, NY, USA, 1968; pp. 231–232. [Google Scholar]
- Hopfield, H. Tropospheric effect on electromagnetically measured range: Prediction from surface weather data. Radio Sci. 1971, 6, 357–367. [Google Scholar] [CrossRef]
- Saastamoinen, J. Introduction to practical computation of astronomical refraction. Bull. Géodésique 1972, 46, 383–397. [Google Scholar] [CrossRef]
- Black, H. An easily implemented algorithm for the tropospheric range correction. J. Geophys. Res. Solid Earth 1978, 83, 1825–1828. [Google Scholar] [CrossRef]
- Berman, A. The Prediction of Zenith Range Refraction from Surface Measurements of Meteorological Parameters; California Institute of Technology, Jet Propulsion Laboratory: Pasadena, CA, USA, 1976; pp. 7–10. [Google Scholar]
- Callahan, P. Prediction of Tropospheric Wet-Component Range Error from Surface Measurements; California Institute of Technology, Jet Propulsion Laboratory: Pasadena, CA, USA, 1973; pp. 41–46. [Google Scholar]
- Ifadis, L. The Atmosphere Delay of Radio Waves: Modeling the Elevation Dependence on a Global Scale; Technical Report No. 38L; School of Electrical and Computer Engineering, Chalmers University of Technology: Goteborg, Sweden, 1986. [Google Scholar]
- Minzner, R. Standard Atmosphere Supplements, 1966; US Government Printing Office: Washington, DC, USA, 1966.
- Farah, A. Assessment of UNB3m neutral atmosphere model and EGNOS model for near-equatorial-tropospheric delay correction. J. Geomat. 2011, 5, 67–72. [Google Scholar]
- Penna, N.; Dodson, A.; Chen, W. Assessment of EGNOS tropospheric correction model. J. Navig. 2001, 54, 37–55. [Google Scholar] [CrossRef]
- Leandro, R.; Santos, M.; Langley, R. UNB Neutral Atmosphere Models: Development and Performance. Available online: http://s3.amazonaws.com/academia.edu.documents/33980498/ionntm2006.leandro.pdf?AWSAccessKeyId=AKIAIWOWYYGZ2Y53UL3A&Expires=1501059859&Signature=qnUO5FTHv86JUuklmYJIXfOUNmY%3D&response-content-disposition=inline%3B%20filename%3DUNB_Neutral_Atmosphere_Models_Developmen.pdf (accessed on 26 July 2017).
- Li, W.; Yuan, Y.; Ou, J.; Li, H.; Li, Z. A new global zenith tropospheric delay model IGGtrop for GNSS applications. Chin. Sci. Bull. 2012, 57, 2132–2139. [Google Scholar] [CrossRef]
- Yao, Y.; He, C.; Zhang, B.; Xu, C. A new global zenith tropospheric delay model GZTD. Chin. J. Geophys. Chin. Ed. 2013, 56, 2218–2227. [Google Scholar] [CrossRef]
- Zhao, J.; Song, S.; Chen, Q.; Zhou, W.; Zhu, W. Establishment of a new global model for zenith tropospheric delay based on functional expression for its vertical profile. Chin. J. Geophys. 2014, 57, 3140–3153. [Google Scholar] [CrossRef]
- Boehm, J.; Niell, A.; Tregoning, P.; Schuh, H. Global mapping function (GMF): A new empirical mapping function based on numerical weather model data. Geophys. Res. Lett. 2006, 33, 1–4. [Google Scholar] [CrossRef]
- Boehm, J.; Möller, G.; Schindelegger, M.; Pain, G.; Weber, R. Development of an improved empirical model for slant delays in the troposphere (GPT2w). GPS Solut. 2014, 19, 433–441. [Google Scholar] [CrossRef]
- Huang, L.; Xie, S.; Liu, L.; Li, J.; Chen, J.; Kang, C. SSIEGNOS: A New Asian Single Site Tropospheric Correction Model. ISPRS Int. J. Geo. Inf. 2017, 6, 20. [Google Scholar] [CrossRef]
- Zhang, H.; Yuan, Y.; Li, W.; Li, Y.; Chai, Y. Assessment of three tropospheric delay models (IGGtrop, EGNOS and UNB3m) based on precise point positioning in the Chinese region. Sensors 2016, 16, 122. [Google Scholar] [CrossRef] [PubMed]
- Chen, B.; Liu, Z. A comprehensive evaluation and analysis of the performance of multiple tropospheric models in China region. IEEE Trans. Geosci. Remote Sens. 2016, 54, 663–678. [Google Scholar] [CrossRef]
- Smith, E.; Weintraub, S. The constants in the equation for atmospheric refractive index at radio frequencies. Proc. IRE 1953, 41, 1035–1037. [Google Scholar] [CrossRef]
- Askne, J.; Nordius, H. Estimation of tropospheric delay for microwaves from surface weather data. Radio Sci. 1987, 22, 379–386. [Google Scholar] [CrossRef]
- Saastamoinen, J. Atmospheric correction for the troposphere and stratosphere in radio ranging satellites. Use Artif. Satell. Geod. 1972, 15, 247–251. [Google Scholar] [CrossRef]
- Davis, J.; Herring, T.; Shapiro, I.; Rogers, A.; Elgered, G. Geodesy by radio interferometry: Effects of atmospheric modeling errors on estimates of baseline length. Radio Sci. 1985, 20, 1593–1607. [Google Scholar] [CrossRef]
- Baby, H.B.; Golé, P.; Lavergnat, J. A model for the tropospheric excess path length of radio waves from surface meteorological measurements. Radio Sci. 1988, 23, 1023–1038. [Google Scholar] [CrossRef]
- World Meteorological Organization. Guide to Meteorological Instruments and Methods of Observation; World Meteorological Organisation: Geneva, Switzerland, 2008. [Google Scholar]
- Niell, A.; Coster, A.; Solheim, F.; Mendes, V.; Toor, P.; Langey, R.; Upham, C. Comparison of measurements of atmospheric wet delay by radiosonde, water vapor radiometer, GPS, and VLBI. J. Atmos. Ocean. Technol. 2001, 18, 830–850. [Google Scholar] [CrossRef]
- Byun, S.; Bar-Sever, Y. A new type of troposphere zenith path delay product of the international GNSS service. J. Geod. 2009, 83, 1–7. [Google Scholar] [CrossRef]
- Zumberge, J.; Heflin, M.; Jefferson, D.; Watkins, M.; Webb, F. Precise point positioning for the efficient and robust analysis of GPS data from large network. J. Geophys. Res. 1997, 102, 5005–5017. [Google Scholar] [CrossRef]
- Tang, C.; Li, T.; Shi, C.; Zhang, S. Annual Period Changes of Zenith Tropospheric Delay of CORS Stations in Tianjin District. J. Geod. Geodyn. 2009, 2, 106–110. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Label | Equation | Type | Input Parameters |
|---|---|---|---|---|
| Saastamoinen | SAAS | (8), (9) | Global | e, P, T, ϕ |
| Saastamoinen_S | SAAS_S | (14) | Single-Site | e, P, T, ϕ |
| Callahan | CH | (7), (13) | Global | e, T |
| Callahan_S | CH_S | (7), (13) | Single-Site | e, T |
| GPT2w | GPT2w | (7), (10), (11) | Single-Site | L, ϕ, h, D |
| GPT2w_Surface | GPT2w_S | (7), (10), (11) | Single-Site | ϕ, h, e, P, T |
| Model | Bias/cm | RMS/cm |
|---|---|---|
| SAAS | 0.62 | 3.62 |
| SAAS_S | 0.19 | 3.19 |
| CH | −1.89 | 3.98 |
| CH_S | −0.05 | 3.38 |
| GPT2w | −1.31 | 4.40 |
| GPT2w_S | −0.59 | 3.46 |
| Model | Spring | Summer | Autumn | Winter | Mean | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| Bias | RMS | Bias | RMS | Bias | RMS | Bias | RMS | Bias | RMS | |
| SAAS | 0.43 | 3.45 | 2.11 | 5.02 | 0.01 | 3.71 | −0.05 | 2.29 | 0.62 | 3.62 |
| SAAS_S | −0.01 | 3.06 | 1.07 | 4.28 | −0.43 | 3.39 | 0.13 | 2.04 | 0.19 | 3.19 |
| CH | −1.84 | 3.88 | −1.68 | 4.75 | −2.55 | 4.49 | −1.48 | 2.78 | −1.89 | 3.98 |
| CH_S | −0.29 | 3.19 | 1.49 | 4.49 | −0.73 | 3.57 | −0.65 | 2.26 | −0.05 | 3.38 |
| GPT2w | −1.32 | 4.23 | −1.00 | 5.65 | −1.76 | 4.77 | −1.16 | 2.96 | −1.31 | 4.40 |
| GPT2w_S | −0.68 | 3.37 | −0.36 | 4.57 | −0.88 | 3.68 | −0.48 | 2.22 | −0.59 | 3.46 |
| Model | BJFS | WUHN | URUM | LHAZ | Mean | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| Bias | RMS | Bias | RMS | Bias | RMS | Bias | RMS | Bias | RMS | |
| SAAS | −1.19 | 3.54 | 1.98 | 6.39 | 1.30 | 2.34 | 1.35 | 2.07 | −0.86 | 3.59 |
| SAAS_S | 0.57 | 3.37 | 1.21 | 6.16 | 0.60 | 1.90 | 0.95 | 1.53 | 0.83 | 3.24 |
| CH | −3.55 | 5.01 | −1.82 | 6.33 | −0.29 | 1.97 | −0.01 | 1.35 | −1.42 | 3.67 |
| CH_S | −0.33 | 3.58 | 0.49 | 6.07 | 0.77 | 2.12 | 0.87 | 1.74 | 0.45 | 3.38 |
| GPT2w | −1.39 | 4.65 | 0.71 | 6.20 | 1.79 | 3.16 | 0.29 | 2.13 | 0.35 | 4.04 |
| GPT2w_S | −1.52 | 3.62 | −1.13 | 6.11 | 0.35 | 1.85 | 1.49 | 2.12 | −0.20 | 3.43 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, C.; Peng, B.; Li, W.; Zhong, S.; Ou, J.; Chen, R.; Zhao, X. Establishment of a Site-Specific Tropospheric Model Based on Ground Meteorological Parameters over the China Region. Sensors 2017, 17, 1722. https://doi.org/10.3390/s17081722
Zhou C, Peng B, Li W, Zhong S, Ou J, Chen R, Zhao X. Establishment of a Site-Specific Tropospheric Model Based on Ground Meteorological Parameters over the China Region. Sensors. 2017; 17(8):1722. https://doi.org/10.3390/s17081722
Chicago/Turabian StyleZhou, Chongchong, Bibo Peng, Wei Li, Shiming Zhong, Jikun Ou, Runjing Chen, and Xinglong Zhao. 2017. "Establishment of a Site-Specific Tropospheric Model Based on Ground Meteorological Parameters over the China Region" Sensors 17, no. 8: 1722. https://doi.org/10.3390/s17081722
APA StyleZhou, C., Peng, B., Li, W., Zhong, S., Ou, J., Chen, R., & Zhao, X. (2017). Establishment of a Site-Specific Tropospheric Model Based on Ground Meteorological Parameters over the China Region. Sensors, 17(8), 1722. https://doi.org/10.3390/s17081722