Full-Duplex Cooperative Sensing for Spectrum-Heterogeneous Cognitive Radio Networks


Abstract
:1. Introduction
- We design a light-weight cooperative sensing framework for full-duplex CRN deployed in sptectrum-heterogeneous environments called PaCoSIF, in which a mandatory cooperation between an SU-Tx and its SU-Rx is implemented with little overhead.
- We derive optimal detection thresholds for the sensors involved in PaCoSIF and propose a fast binary-searching algorithm to obtain numerical solutions. With perfect SINR information, the false alarm rate of PaCoSIF can be minimized.
- We investigate the performance of PaCoSIF via extensive simulations. The results reveal the quantitative impact of spectrum heterogeneity and SINR error upon the performance of PaCoSIF. The necessity of threshold optimization for cooperative sensing in spectrum-heterogeneous environments is also uncovered.
2. Related Work
2.1. Spectrum Sensing with Full-Duplex Cognitive Radio
2.2. Cooperative Sensing in Spectrum-Heterogeneous Environments
3. Deployment and Protocol Design of PaCoSIF
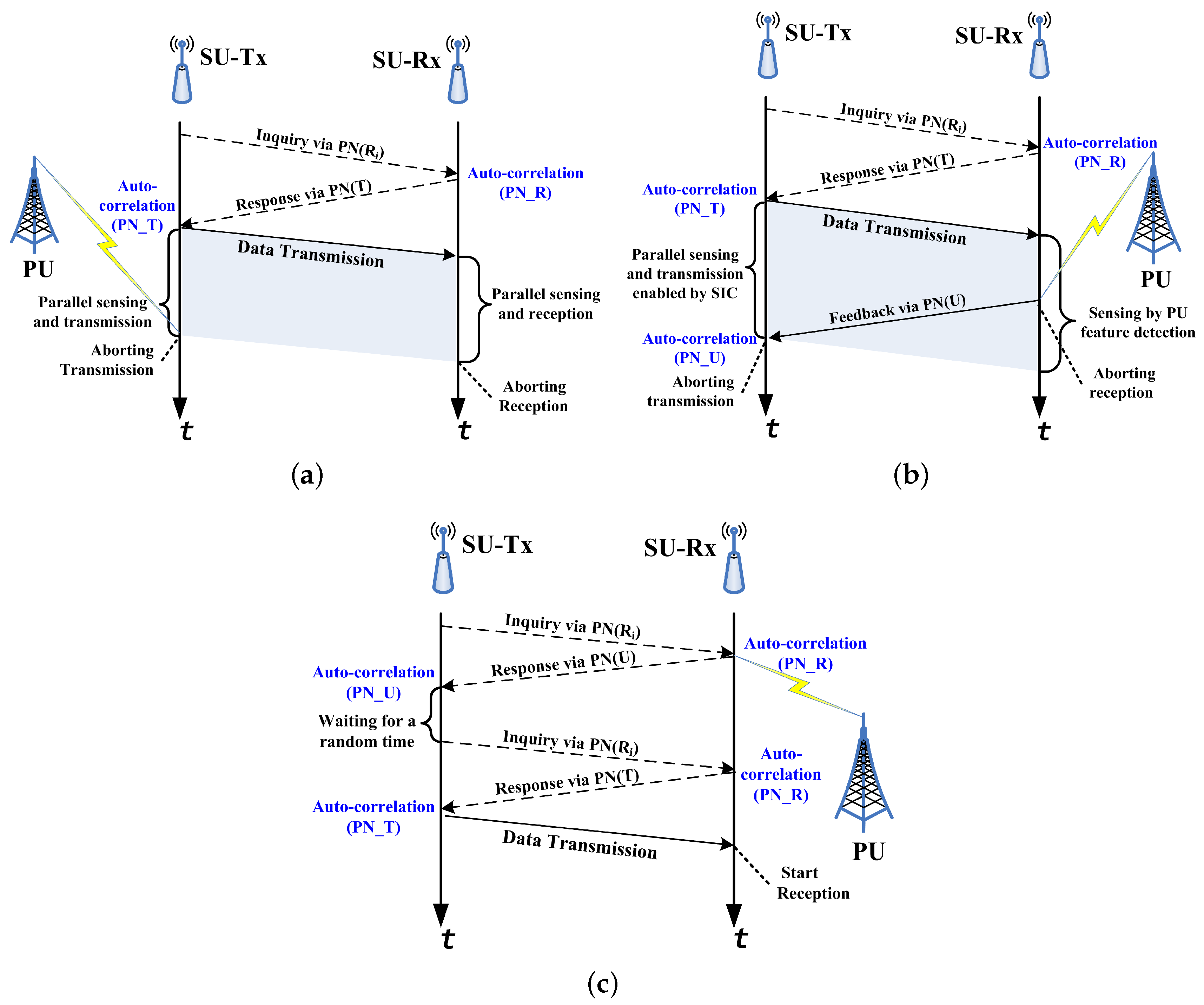
- : the PN sequence assigned to the i-th SU-Rx indicates that a data transmission directed to it is to be initialized by the SU-Tx.
- : the PN sequence assigned to the SU-Tx indicates that PU is idle, and a data transmission to the intended receiver is allowed to be started.
- : the PN sequence assigned to PU indicates that PU is active, and current data transmission should be abandoned or suspended.
4. Optimizing Sensing Performance
4.1. Problem Formulation
4.2. Problem Solution
| Algorithm 1 Binary searching algorithm to find |
| Intput: Parameters of detector at SU-Tx: , , N; Parameters of detector at SU-Rx: , N, , ; The upper bound on the missed detection rate: . Output: The optimal exponent assigned to the SU-Tx for sensitivity relaxation: . 1: if = then 2: = 0.5 3: else if < then 4: = 0.5, = 1 5: else 6: = 0, = 0.5 7: end if 8: while do 9: 10: if has the same sign with then 11: 12: else 13: 14: end if 15: end while 16: |
5. Performance Evaluation
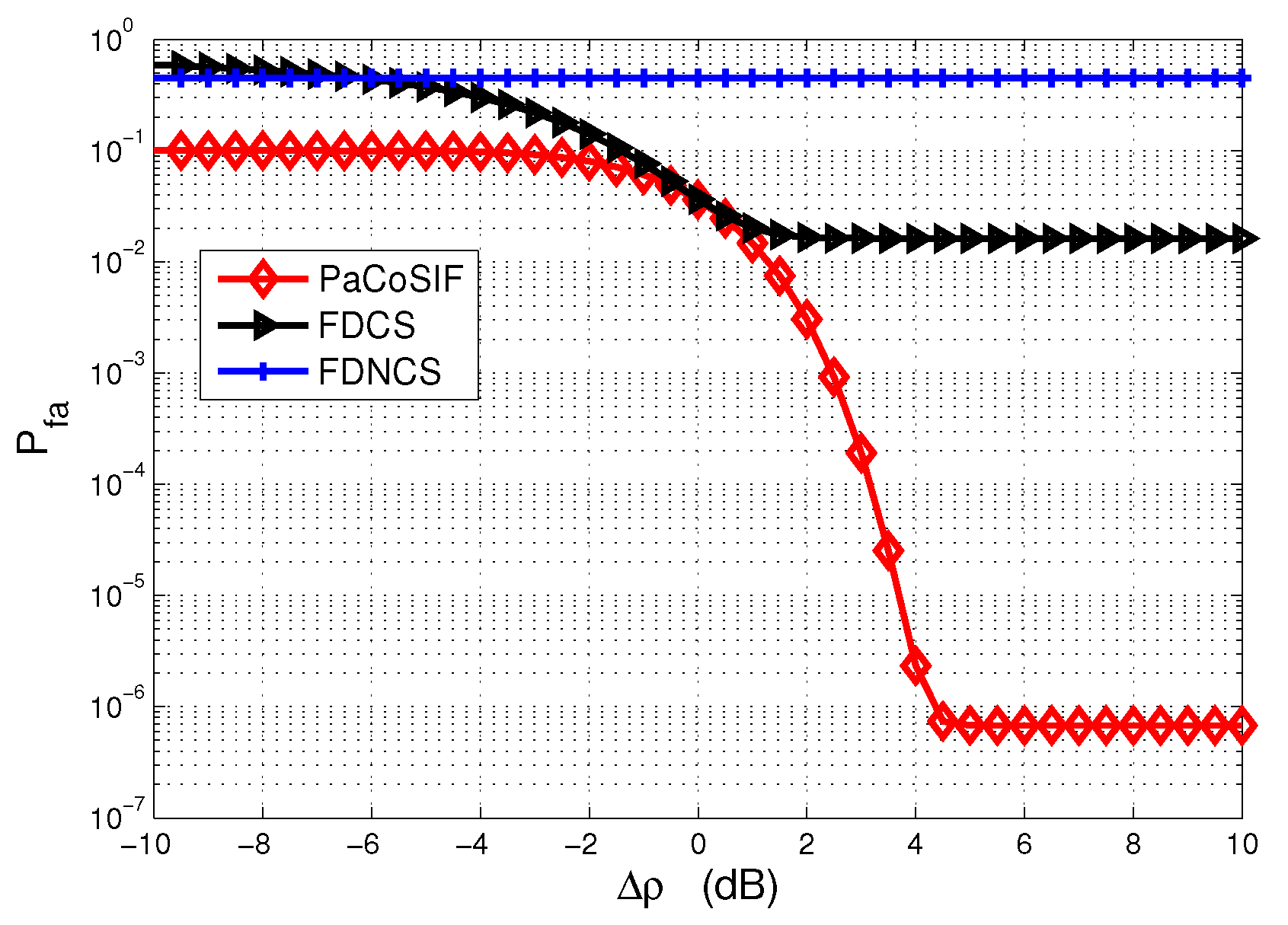
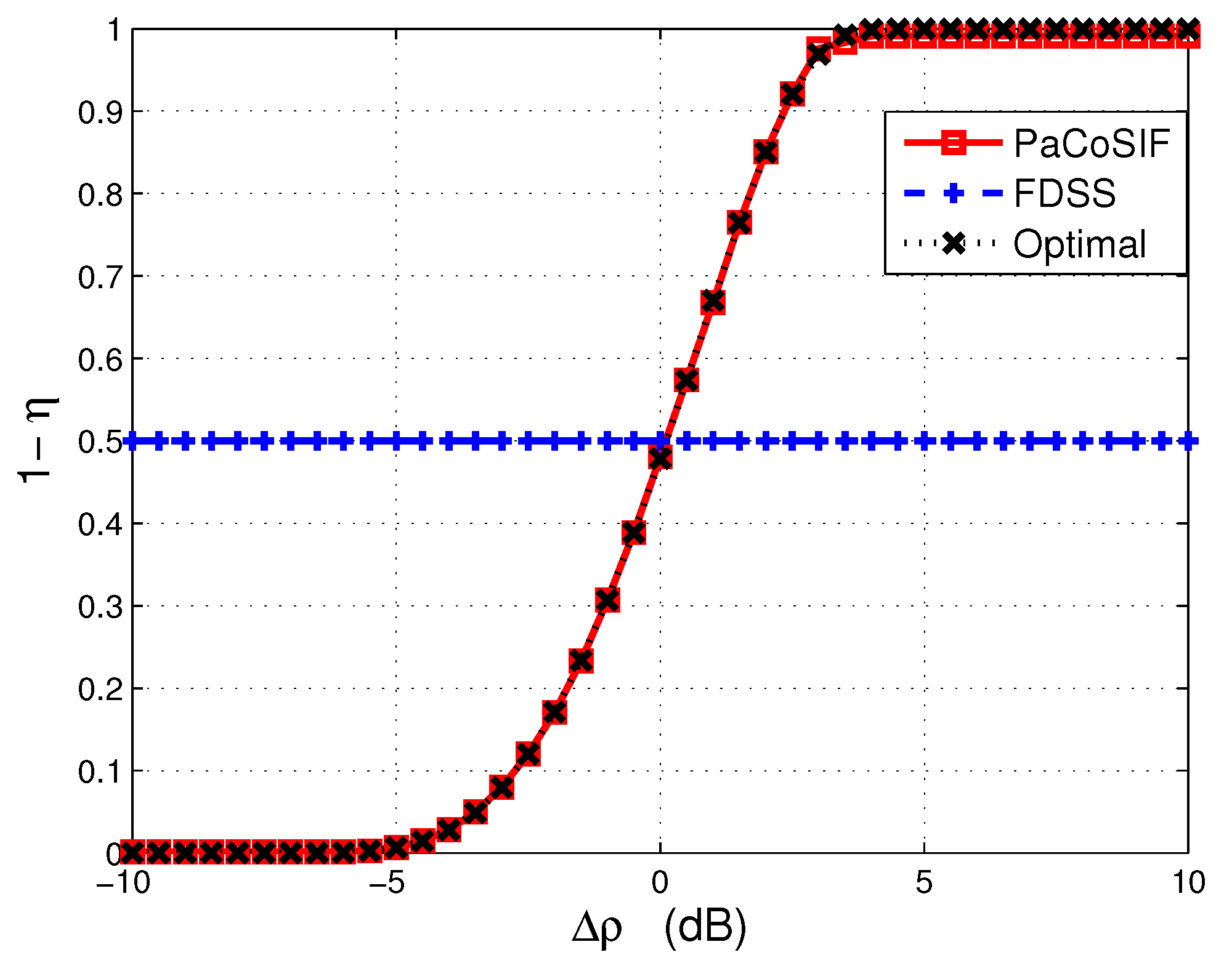
5.1. Sensing Performance
5.1.1. Sensing Performance with Perfect SINR Information
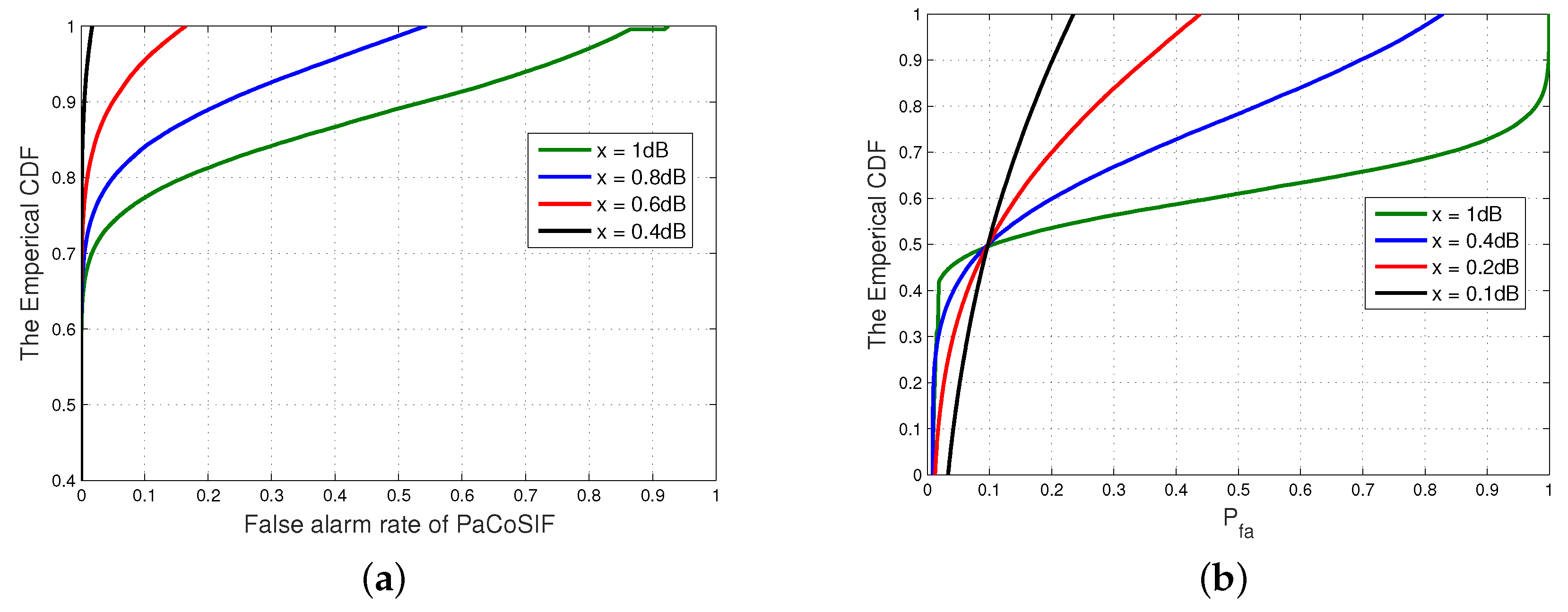
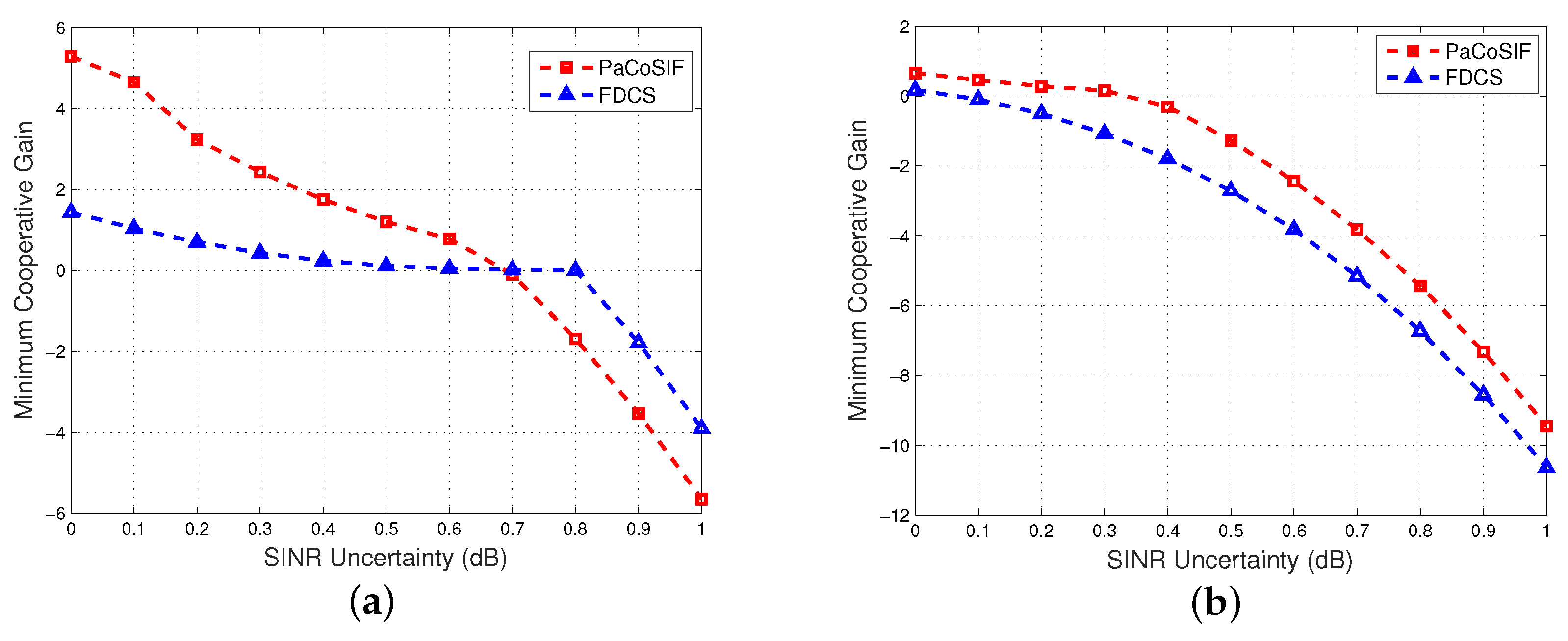
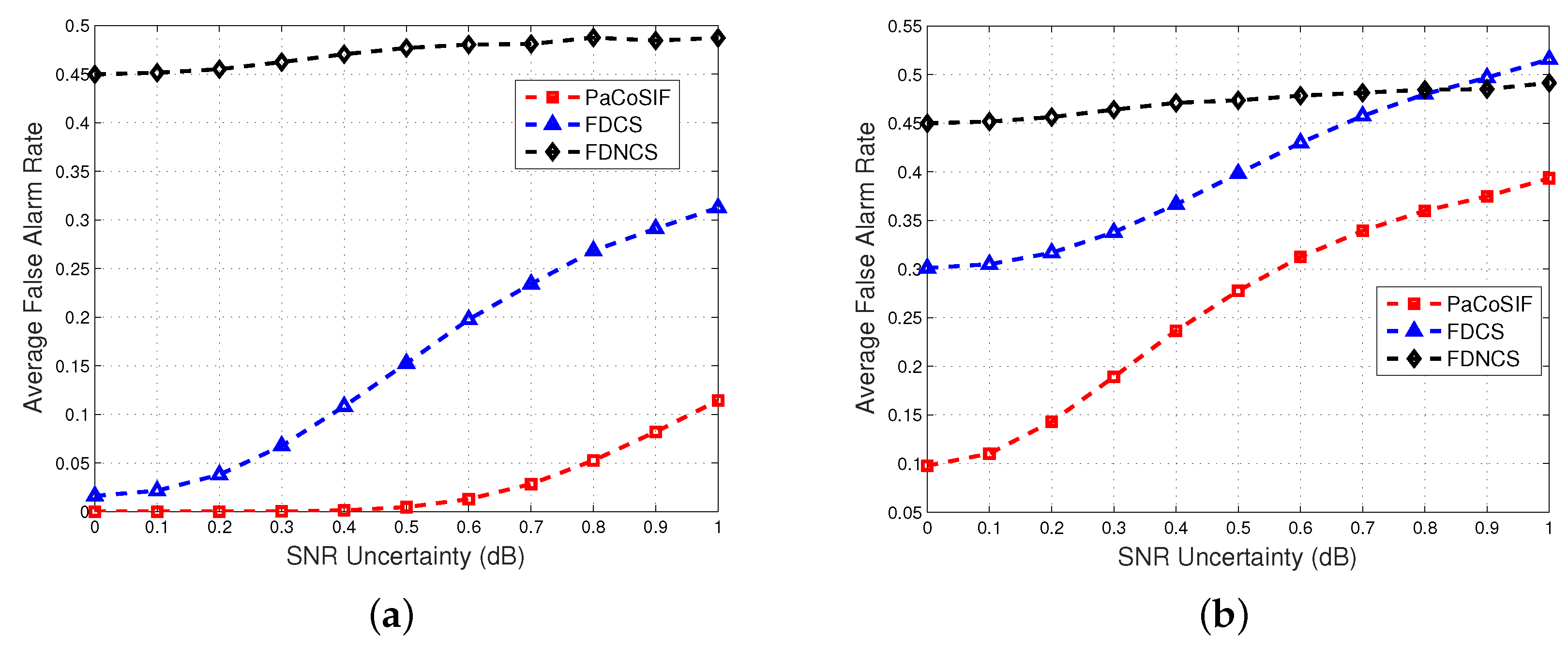
5.1.2. Sensing Performance with Imperfect SINR Information
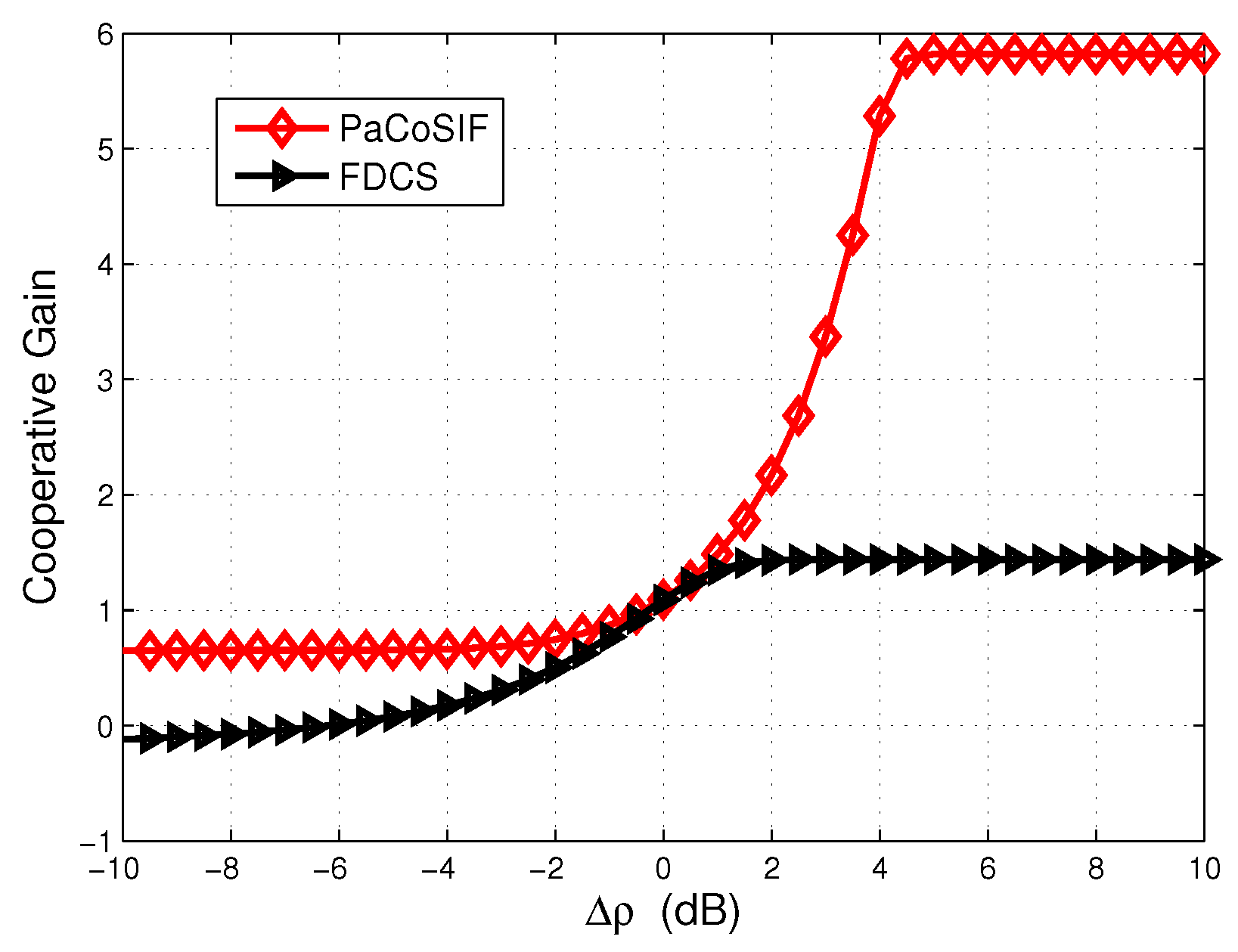
5.2. CRN Throughput Enhancement
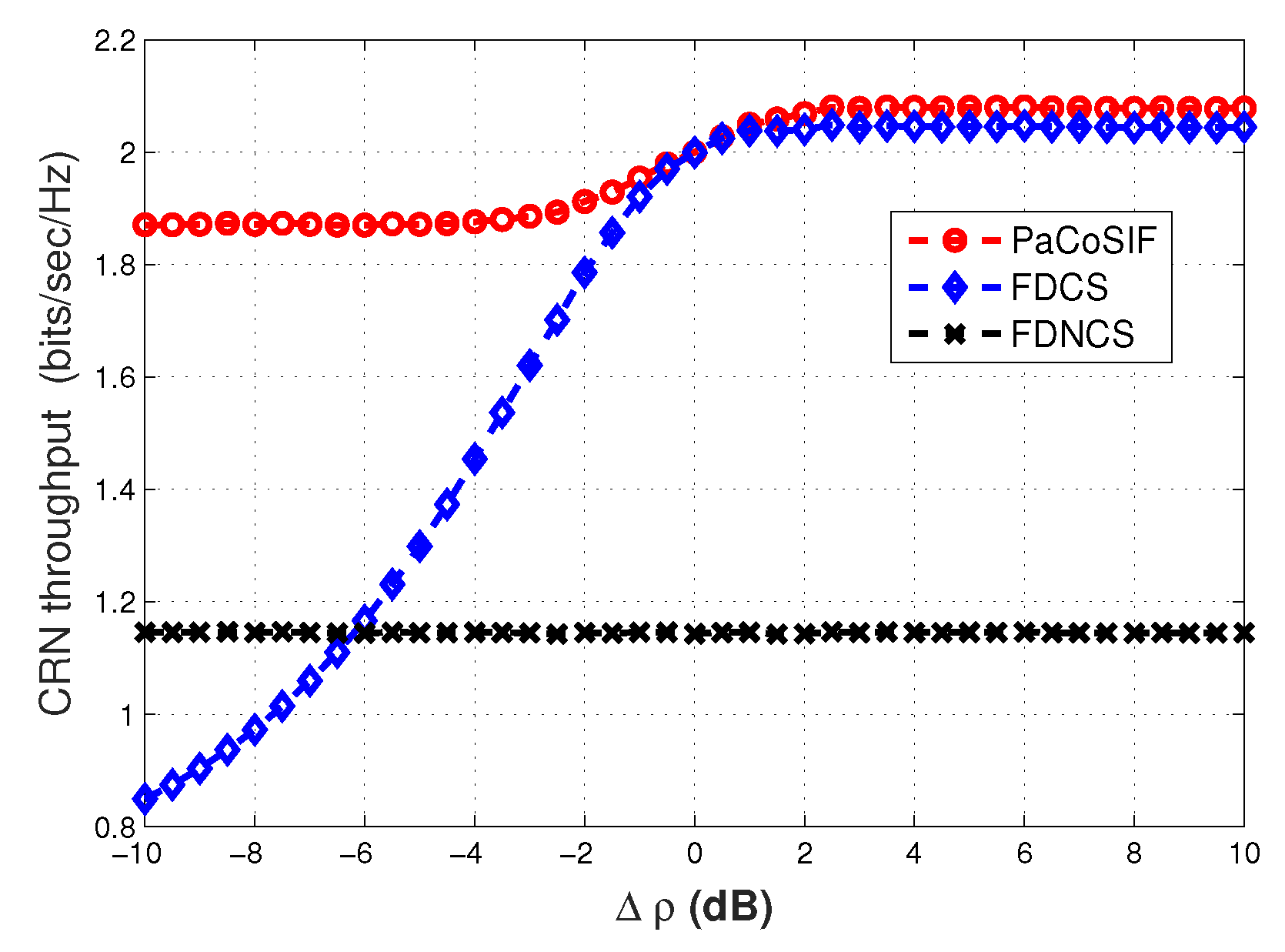
5.2.1. CRN Throughput with Perfect SINR Information
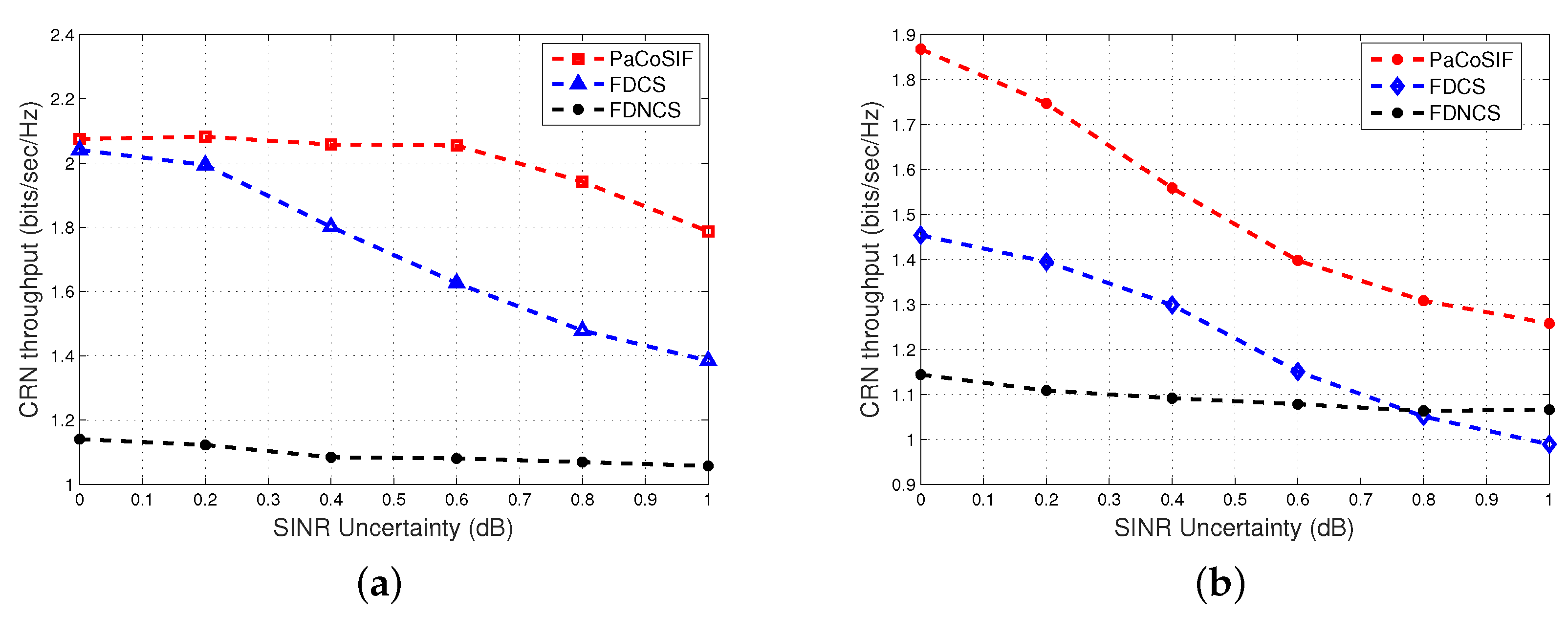
5.2.2. CRN Throughput with Imperfect SINR Information
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| PaCoSIF | Pairwise Cooperative Sensing with Instantaneous Feedback |
| FDNCS | Full-Duplex Non-Cooperative Sensing |
| FDCS | Full-Duplex Cooperative Sensing |
| OFDM | Orthogonal Frequency Division Multiplexing |
| SINR | Signal-to-Interference-and-Noise-Ratio |
| CRN | Cognitive Radio Networks |
| CR | Cognitive Radio |
| PU | Primary User |
| SU | Secondary User |
| CG | Cooperative Gain |
| NP | Neyman–Pearson Criteron |
References
- Mitola, J.; Maguire, G.Q. Cognitive Radio: Making Software Radios More Personal. IEEE Pers. Commun. 1999, 6, 13–18. [Google Scholar] [CrossRef]
- Liang, Y.; Zeng, Y.; Peh, E.; Hoang, A. Sensing-Throughput Tradeoff for Cognitive Radio Networks. IEEE Trans. Wirel. Commun. 2008, 7, 1326–1337. [Google Scholar] [CrossRef]
- Stotas, S.; Nallanathan, A. Overcoming the Sensing-Throughput Tradeoff in Cognitive Radio Networks. In Proceedings of the IEEE International Conference on Communications (ICC), Cape Town, South Africa, 23–27 May 2010. [Google Scholar]
- Bogale, T.E.; Vandendorpe, L.; Le, L.B. Sensing Throughput Tradeoff for Cognitive Radio Networks with Noise Variance Uncertainty. In Proceedings of the 9th IEEE International Conference on Cognitive Radio Oriented Wireless Networks and Communications (CROWNCOM), Oulu, Finland, 2–4 June 2014. [Google Scholar]
- Pradhan, H.; Kalamkar, S.S.; Banerjee, A. Sensing-Throughput Tradeoff in Cognitive Radio with Random Arrivals and Departures of Multiple Primary Users. IEEE Commun. Lett. 2015, 19, 415–418. [Google Scholar] [CrossRef]
- Kaushik, A.; Sharma, S.K.; Chatzinotas, S.; Ottersten, B.; Jondral, F.K. Sensing-Throughput Tradeoff for Interweave Cognitive Radio System: A Deployment-Centric Viewpoint. IEEE Trans. Wirel. Commun. 2016, 15, 3690–3702. [Google Scholar] [CrossRef]
- Bharadia, D.; McMilin, E.; Katti, S. Full Duplex Radios. In Proceedings of the ACM SIGCOMM, Hong Kong, China, 12–16 August 2013; pp. 375–386. [Google Scholar]
- Tsakalaki, E.; Alrabadi, O.N.; Tatomirescu, A.; DeCarvalho, E.; Pedersen, G.F. Concurrent Communication and Sensing in Cognitive Radio Devices: Challenges and an Enabling Solution. IEEE Trans. Antennas Propag. 2014, 62, 1125–1137. [Google Scholar] [CrossRef]
- Afifi, W.; Krunz, M. Exploiting Self-Interference Suppression for Improved Spectrum Awareness/Efficiency in Cognitive Radio Systems. In Proceedings of the IEEE INFOCOM, Turin, Italy, 14–19 April 2013; pp. 1258–1266. [Google Scholar]
- Liao, Y.; Wang, T.; Song, L.; Han, Z. Listen-and-talk: Full-duplex Cognitive Radio Networks. In Proceedings of the IEEE Global Communications Conference (GLOBECOM), Austin, TX, USA, 8–12 December 2014. [Google Scholar]
- Afifi, W.; Krunz, M. Adaptive Transmission-reception-sensing Strategy for Cognitive Radios with Full-duplex Capabilities. In Proceedings of the 2014 IEEE International Symposium on Dynamic Spectrum Access Networks (DYSPAN), McLean, VA, USA, 1–4 April 2014. [Google Scholar]
- Afifi, W.; Krunz, M. Incorporating Self-interference Suppression for Full-duplex Operation in Opportunistic Spectrum Access Systems. IEEE Trans. Wirel. Commun. 2015, 14, 2180–2191. [Google Scholar] [CrossRef]
- Cheng, W.; Zhang, X.; Zhang, H. Full Duplex Spectrum Sensing in Non-time-slotted Cognitive Radio Networks. In Proceedings of the IEEE Military Communications Conference (MilCOM), Baltimore, MD, USA, 7–10 November 2011. [Google Scholar]
- Cheng, W.; Zhang, X.; Zhang, H. Full-Duplex Spectrum-Sensing and MAC-Protocol for Multichannel Nontime-slotted Cognitive Radio Networks. IEEE J. Sel. Areas Commun. 2015, 33, 820–830. [Google Scholar] [CrossRef]
- Yang, J.; Zhu, Y.; Ahmad, I.; Gao, M.; Zhang, Y.; Feng, Z.; Zhang, Y. Full-duplex Spectrum Sensing Scheme Based on Phase Difference. In Proceedings of the IEEE Vehicular Technology Conference (VTC Fall), Vancouver, BC, Canada, 14–17 September 2014. [Google Scholar]
- Ahmed, E.; Eltawil, A.; Sabharwal, A. Simultaneous Transmit and Sense for Cognitive Radios using Full-duplex: A First Study. In Proceedings of the IEEE International Symposium on Antennas and Propagation Society (APSURSI), Chicago, IL, USA, 8–14 July 2012. [Google Scholar]
- Liao, Y.; Wang, T.; Song, L.Y.; Jiao, B. Cooperative Spectrum Sensing for Full-Duplex Cognitive Radio Networks. In Proceedings of the IEEE International Conference on Communication Systems (ICCS), Macau, China, 19–21 November 2014; pp. 56–60. [Google Scholar]
- Shi, L.X.; Bahl, P.; Katabi, D. Beyond Sensing: Multi-GHz Realtime Spectrum Analytics. In Proceedings of the 12th USENIX NSDI, Oakland, CA, USA, 4–6 May 2015; pp. 159–172. [Google Scholar]
- Wu, Q.; Ding, G.; Wang, J.; Yao, Y. Spatial-temporal Opportunity Detection for Spectrum-heterogeneous Cognitive Radio Networks: Two-dimensional Sensing. IEEE Trans. Wirel. Commun. 2013, 12, 516–526. [Google Scholar] [CrossRef]
- Li, H. Cooperative Spectrum Sensing via Belief Propagation in Spectrum-heterogeneous Cognitive Radio Systems. In Proceedings of the IEEE Conference on Wireless Communications and Networking (WCNC), Sydney, Australia, 18–21 April 2010. [Google Scholar]
- Tu, Y.; Chen, K. General Spectrum Sensing in Cognitive Radio Networks. arXiv 2009, arXiv:0907.2859. [Google Scholar]
- Mishra, S.M.; Sahai, A.; Brodersen, R.W. Cooperative Sensing among Cognitive Radios. In Proceedings of the IEEE International Conference on Communications (ICC), Istanbul, Turkey, 11–15 June 2006; pp. 1658–1663. [Google Scholar]
- Akyildiz, I.F.; Lo, B.F.; Balakrishnan, R. Cooperative Spectrum Sensing in Cognitive Radio Networks: A Survey. Elsevier Phys. Commun. 2011, 4, 40–62. [Google Scholar] [CrossRef]
- Kim, H.; Shin, K.G. In-Band Spectrum Sensing in IEEE 802.22 WRANs for Incumbent Protection. IEEE Trans. Mob. Comput. 2010, 9, 1766–1779. [Google Scholar] [CrossRef]
- Peh, E.; Liang, Y. Optimization for Cooperative Sensing in Cognitive Radio Networks. In Proceedings of the IEEE Conference on Wireless Communications and Networking (WCNC), Hongkong, China, 11–15 March 2007; pp. 27–32. [Google Scholar]
- Zhang, W.; Mallik, R.K.; Letaief, K. Optimization of Cooperative Spectrum Sensing with Energy Detection in Cognitive Radio Networks. IEEE Trans. Wirel. Commun. 2009, 8, 5761–5766. [Google Scholar] [CrossRef]
- Thomopoulos, S.C.; Zhang, L. Optimal Distributed Decision Fusion. IEEE Trans. Aerosp. Electron. Syst. 1989, 66, 761–765. [Google Scholar] [CrossRef]
- Thomopoulos, S.C.; Zhang, L. Distributed Decision Fusion in the Presence of Networking Delays and Channel Errors. Inf. Sci. 1992, 66, 91–118. [Google Scholar] [CrossRef]
- Viswanathan, R.; Varshney, P.K. Distributed Detection with Multiple Sensors, Part I. Fundamentals. Proc. IEEE 1997, 85, 54–63. [Google Scholar] [CrossRef]
- Chen, B.; Jiang, R.X.; Kasetkasem, T.; Varshney, P.K. Channel Aware Decision Fusion In Wireless Sensor Networks. IEEE Trans. Signal Process. 2004, 52, 3454–3458. [Google Scholar] [CrossRef]
- Liu, K.; Sayeed, A.M. Optimal Distributed Detection Strategies for Wireless Sensor Networks. In Proceedings of the 42nd Annual Allerton Conference on Communication Control and Computing, Monticello, IL, USA, 29 September–1 October 2004. [Google Scholar]
- Zeng, Y.; Liang, Y.; Hoang, A.T.; Zhang, R. A review on Spectrum Sensing for Cognitive Radio: Challenges and Solutions. EURASIP J. Adv. Signal Process. 2010, 2010, 381–465. [Google Scholar] [CrossRef]
- Sen, S.; Choudhury, R.R.; Nelakuditi, S. CSMA/CN: Carrier Sense Multiple Access with Collision Notification. IEEE/ACM Trans. Netw. 2012, 20, 544–556. [Google Scholar] [CrossRef]
- Chaudhari, S.; Koivunen, V.; Poor, H.V. Autocorrelation-Based Decentralized Sequential Detection of OFDM Signals in Cognitive Radios. IEEE Trans. Signal Process. 2009, 57, 2690–2700. [Google Scholar] [CrossRef]
- Singh, A.; Bhatnagar, M.R.; Mallik, R.K. Performance of an Improved Energy Detector in Multihop Cognitive Radio Networks. IEEE Trans. Veh. Technol. 2016, 65, 732–743. [Google Scholar] [CrossRef]
- Price, R.; Abramson, N. Detection Theory. IEEE Trans. Inf. Theory 1961, 7, 135–139. [Google Scholar] [CrossRef]
- Poor, H.V. An Introduction to Signal Detection and Estimation; Springer Science Business Media: Berlin, Germany, 2013. [Google Scholar]
- Tandra, R.; Sahai, A. Fundamental Limits on Detection in Low SNR under Noise Uncertainty. In Proceedings of the IEEE International Conference on Wireless Networks, Communications and Mobile Computing, Maui, HI, USA, 13–16 June 2005. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Interpretation | Comment |
|---|---|---|
| The link level missed detection rate | ||
| The link level false alarm rate | ||
| The bound on the missed detection rate of the CRN | A typical value is 0.1 as proposed in the IEEE 802.22 standard | |
| p | The missed detection rate of the SU-Tx or SU-Rx | |
| q | The false alarm rate of the SU-Tx or SU-Rx | |
| The detection threshold of the SU-Tx or SU-Rx | ||
| The difference of the SINR between the SU-Rx and the SU-Tx, i.e., | Used as an indicator for spectrum heterogeneity | |
| The exponent assigned to the SU-Tx for relaxing the missed detection rate | The exponent assigned to the SU-Rx is |
| Sensing Mechanism | 0 dB | 3 dB | ||||||
|---|---|---|---|---|---|---|---|---|
| CG | CG | |||||||
| FDNCS | 0.1 | N/A | 0.1 | N/A | 0.1 | N/A | 0.1 | N/A |
| FDCS | 0.316 | 0.316 | 0.0365 | 0.438 | 0.316 | 0.316 | 0.017 | 0.770 |
| PaCoSIF | 0.316 | 0.316 | 0.0365 | 0.438 | 0.945 | 0.106 | 2.712 | |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, P.; Qi, W.; Yuan, E.; Wei, L.; Zhao, Y. Full-Duplex Cooperative Sensing for Spectrum-Heterogeneous Cognitive Radio Networks. Sensors 2017, 17, 1773. https://doi.org/10.3390/s17081773
Liu P, Qi W, Yuan E, Wei L, Zhao Y. Full-Duplex Cooperative Sensing for Spectrum-Heterogeneous Cognitive Radio Networks. Sensors. 2017; 17(8):1773. https://doi.org/10.3390/s17081773
Chicago/Turabian StyleLiu, Peng, Wangdong Qi, En Yuan, Li Wei, and Yuexin Zhao. 2017. "Full-Duplex Cooperative Sensing for Spectrum-Heterogeneous Cognitive Radio Networks" Sensors 17, no. 8: 1773. https://doi.org/10.3390/s17081773
APA StyleLiu, P., Qi, W., Yuan, E., Wei, L., & Zhao, Y. (2017). Full-Duplex Cooperative Sensing for Spectrum-Heterogeneous Cognitive Radio Networks. Sensors, 17(8), 1773. https://doi.org/10.3390/s17081773