Direction-of-Arrival Estimation with Coarray ESPRIT for Coprime Array

Abstract
:1. Introduction
- We derive the coarray statistics of the coprime array, and introduce the idea of ESPRIT to the coarray domain for retrieving the DOAs with an increased number of DOFs.
- We extract a pair of shift invariant uniform linear subarrays from the coprime coarray, and investigate the rotational invariance of the corresponding coarray domain signal subspaces.
- We provide the closed-form solution for efficient DOA estimation, which enables performing off-grid DOA estimation without predefined spatial sampling grids or the spectrum peak search process.
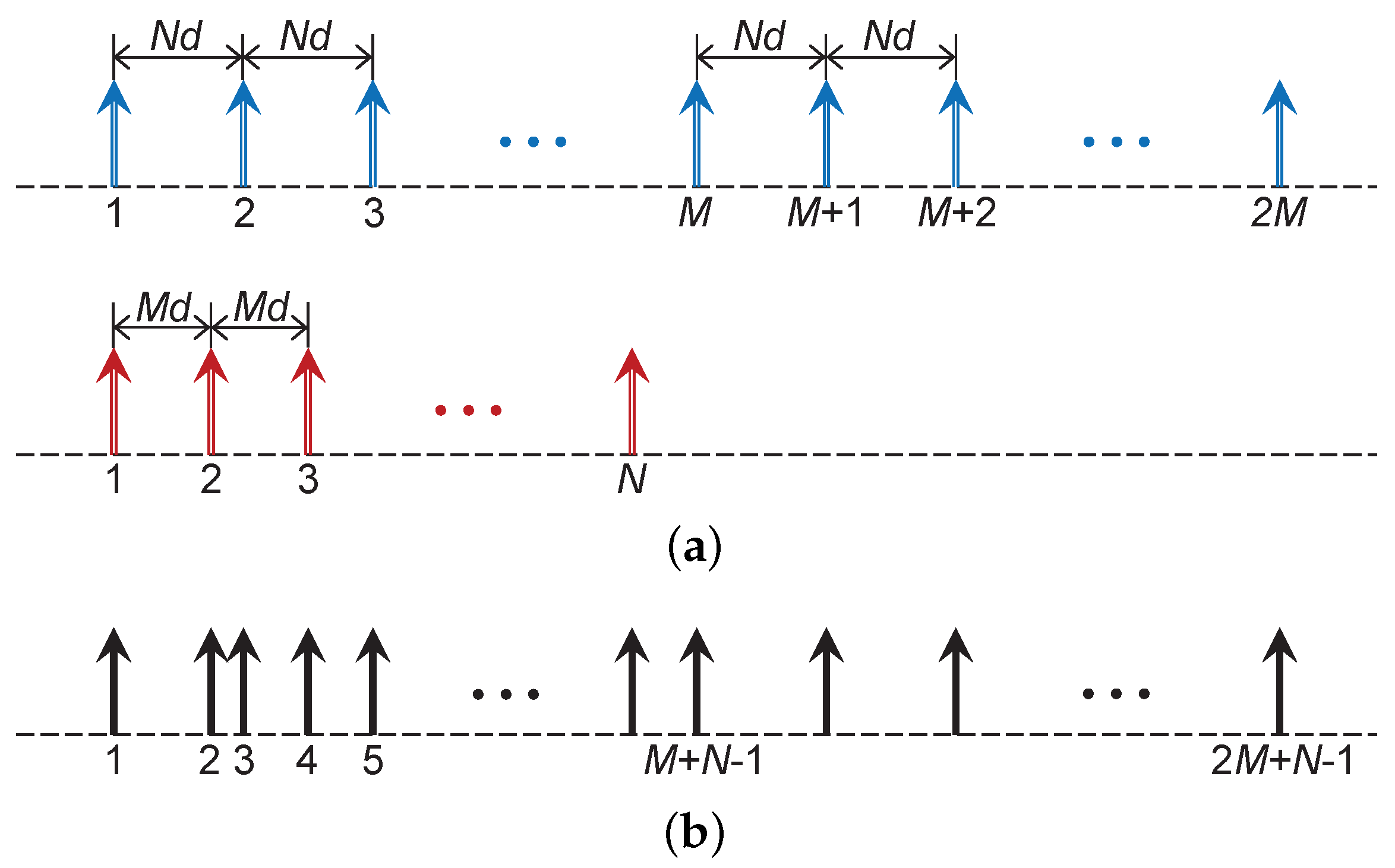
2. Coprime Array and Signal Model
3. The Proposed DOA Estimation Algorithm
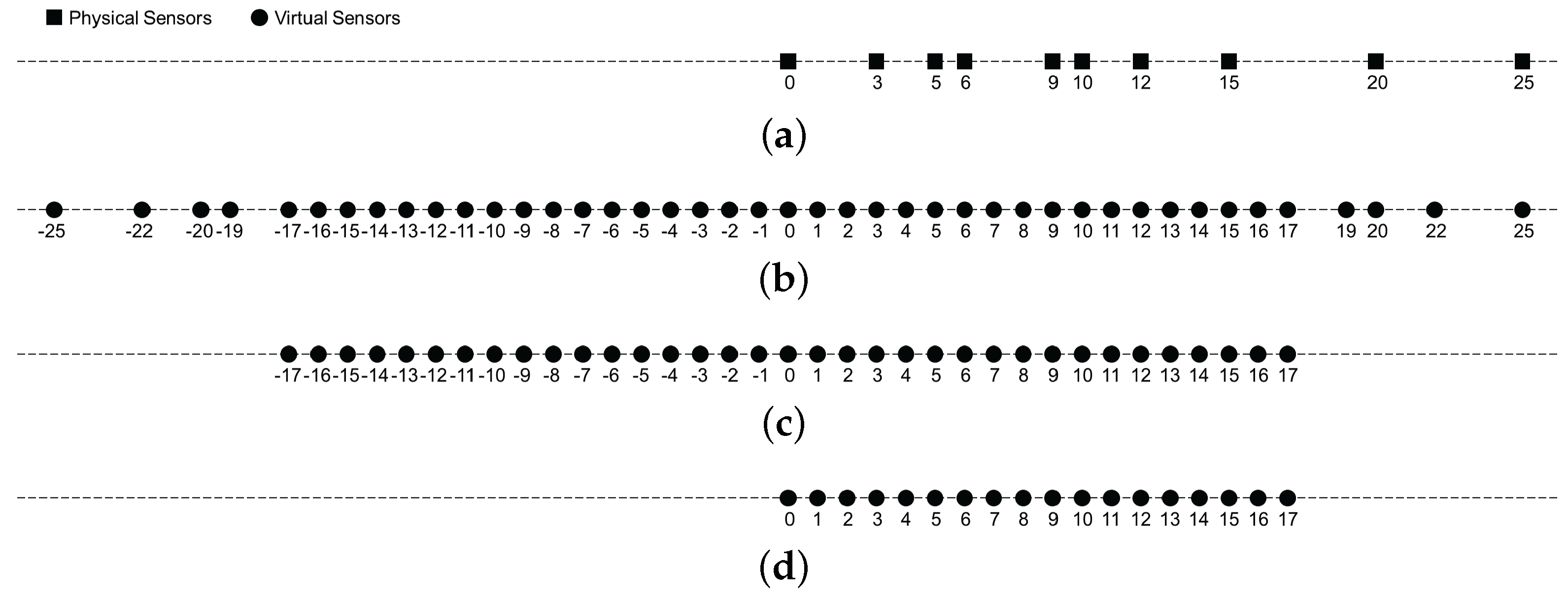
3.1. Coprime Coarray Statistics Derivation
3.2. ESPRIT in Coarray Domain for DOA Estimation
3.3. Computational Complexity Analyses and Remarks
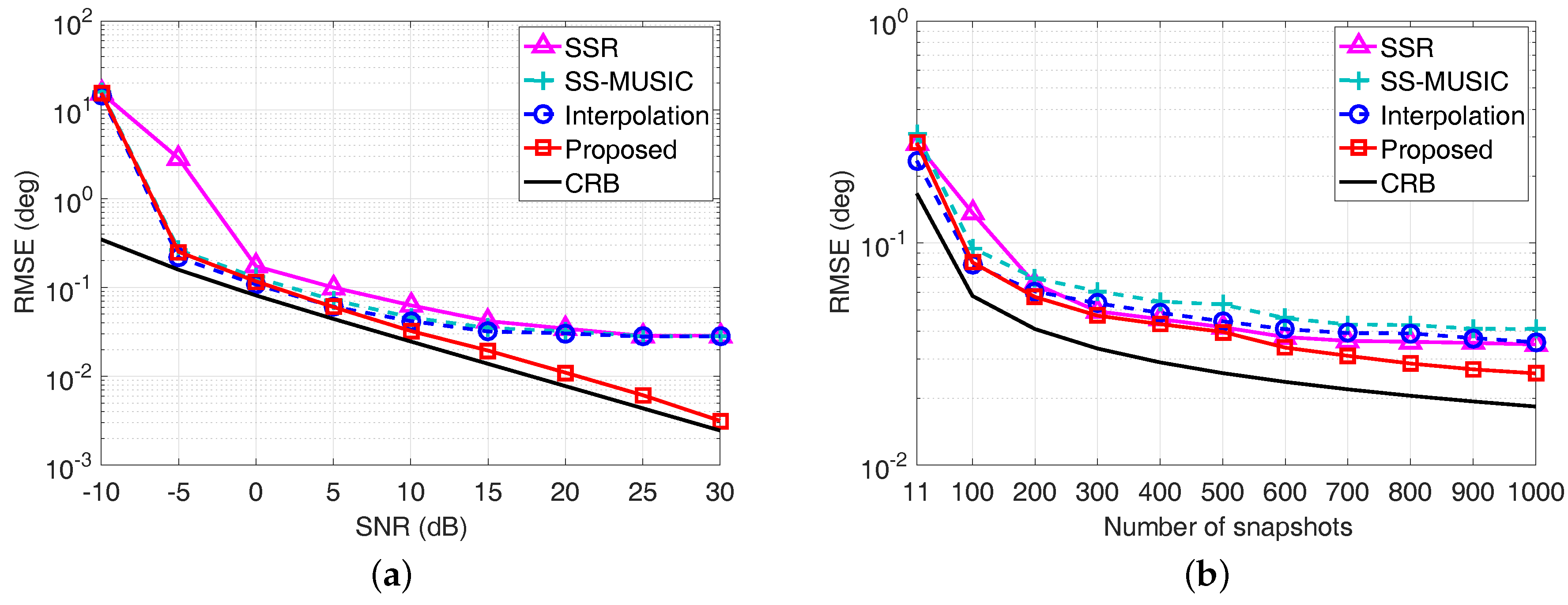
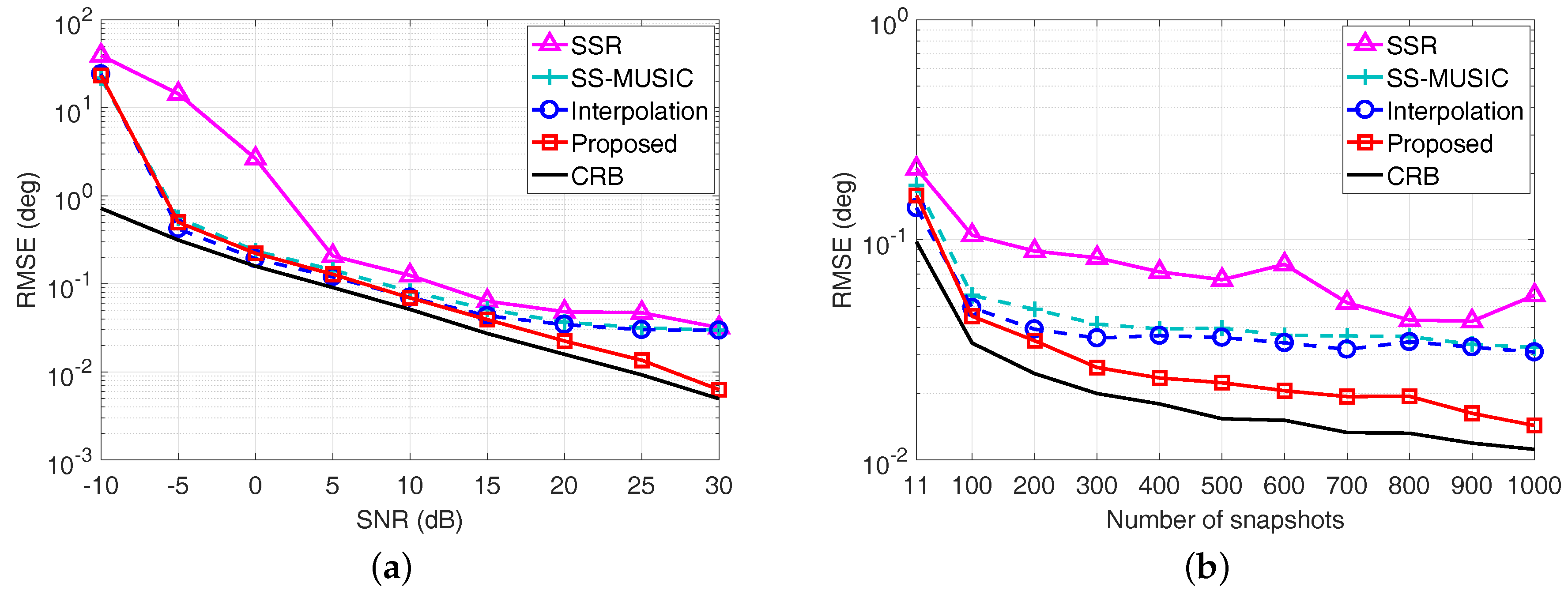
4. Simulation Results
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| CRB | Cramér–Rao Bound |
| DOA | Direction-of-Arrival |
| DOF | Degree-of-Freedom |
| ESPRIT | Estimation of Signal Parameters via Rotational Invariance Techniques |
| MUSIC | MUltiple SIgnal Classification |
| RMSE | Root Mean Square Error |
| SNR | Signal-to-Noise Ratio |
| SS-MUSIC | Spatial Smoothing MUSIC |
| SSR | Sparse Signal Reconstruction |
| ULA | Uniform Linear Array |
References
- Van Trees, H.L. Detection, Estimation, and Modulation Theory; Part IV: Optimum Array Processing; Wiley: New York, NY, USA, 2002. [Google Scholar]
- Gu, Y.; Goodman, N.A. Information-theoretic compressive sensing kernel optimization and Bayesian Cramér-Rao bound for time delay estimation. IEEE Trans. Signal Process. 2017, 65, 4525–4537. [Google Scholar] [CrossRef]
- Gu, Y.; Zhang, Y.D.; Goodman, N.A. Optimized compressive sensing-based direction-of-arrival estimation in massive MIMO. In Proceedings of the 42nd IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), New Orleans, LA, USA, 5–9 March 2017; pp. 3181–3185. [Google Scholar]
- Wu, X.; Zhu, W.P.; Yan, J. A fast gridless covariance matrix reconstruction method for one-and two-dimensional direction-of-arrival estimation. IEEE Sens. J. 2017, 17, 4916–4927. [Google Scholar] [CrossRef]
- Zhao, L.; Song, W.Z.; Ye, X.; Gu, Y. Asynchronous broadcast-based decentralized learning in sensor networks. Int. J. Parallel Emerg. Distrib. Syst. 2017, 32, 1–19. [Google Scholar] [CrossRef]
- Chen, H.; Hou, C.P.; Liu, W.; Zhu, W.P.; Swamy, M.N.S. Efficient two-dimensional direction-of-arrival estimation for a mixture of circular and noncircular sources. IEEE Sens. J. 2016, 16, 2527–2536. [Google Scholar] [CrossRef]
- Yang, C.; Zhang, H.; Qu, F.; Shi, Z. Secured measurement fusion scheme against deceptive ECM attack in radar network. Secur. Commun. Netw. 2016, 9, 3911–3921. [Google Scholar] [CrossRef]
- Chen, H.; Hou, C.P.; Wang, Q.; Huang, L.; Yan, W.; Pu, L. Improved azimuth/elevation angle estimation algorithm for three-parallel uniform linear arrays. IEEE Antennas Wireless Propag. Lett. 2015, 14, 329–332. [Google Scholar] [CrossRef]
- Gu, Y.; Goodman, N.A.; Ashok, A. Radar target profiling and recognition based on TSI-optimized compressive sensing kernel. IEEE Trans. Signal Process. 2014, 62, 3194–3207. [Google Scholar]
- Gu, Y.; Leshem, A. Robust adaptive beamforming based on interference covariance matrix reconstruction and steering vector estimation. IEEE Trans. Signal Process. 2012, 60, 3881–3885. [Google Scholar]
- Yang, C.; Zhang, H.; Qu, F.; Shi, Z. Performance of target tracking in radar network system under deception attack. In Proceedings of the 10th International Conference on Wireless Algorithms, Systems, and Applications (WASA 2015), Qufu, China, 12–15 August 2015; pp. 664–673. [Google Scholar]
- Wang, B.; Wang, W.; Gu, Y.; Lei, S. Underdetermined DOA estimation of quasi-stationary signals using a partly-calibrated array. Sensors 2017, 17, 702. [Google Scholar] [CrossRef] [PubMed]
- Wu, X.; Zhu, W.P.; Yan, J. A Toeplitz covariance matrix reconstruction approach for direction-of-arrival estimation. IEEE Trans. Veh. Technol. 2017. [Google Scholar] [CrossRef]
- Chen, H.; Hou, C.; Zhu, W.P.; Liu, W.; Dong, Y.Y.; Peng, Z.; Wang, Q. ESPRIT-like two-dimensional direction finding for mixed circular and strictly noncircular sources based on joint diagonalization. Signal Process. 2017, 141, 48–56. [Google Scholar] [CrossRef]
- Gu, Y.; Goodman, N.A.; Hong, S.; Li, Y. Robust adaptive beamforming based on interference covariance matrix sparse reconstruction. Signal Process. 2014, 96, 375–381. [Google Scholar] [CrossRef]
- Chen, H.; Hou, C.P.; Wang, Q.; Huang, L.; Yan, W.Q. Cumulants-based Toeplitz matrices reconstruction method for 2-D coherent DOA estimation. IEEE Sens. J. 2014, 14, 2824–2832. [Google Scholar] [CrossRef]
- Wu, X.; Zhu, W.P.; Yan, J. Direction of arrival estimation for off-grid signals based on sparse Bayesian learning. IEEE Sens. J. 2016, 16, 2004–2016. [Google Scholar] [CrossRef]
- Ge, X.; Tu, S.; Mao, G.; Wang, C.X.; Han, T. 5 G Ultra-dense cellular networks. IEEE Wirel. Commun. 2016, 23, 72–79. [Google Scholar] [CrossRef]
- Vaidyanathan, P.P.; Pal, P. Sparse sensing with co-prime samplers and arrays. IEEE Trans. Signal Process. 2011, 59, 573–586. [Google Scholar] [CrossRef]
- Moffet, A.T. Minimum-redundancy linear arrays. IEEE Trans. Antennas Propag. 1968, 16, 172–175. [Google Scholar] [CrossRef]
- Bloom, G.S.; Golomb, S.W. Applications of numbered undirected graphs. Proc. IEEE 1977, 65, 562–570. [Google Scholar] [CrossRef]
- Zhou, C.; Gu, Y.; Zhang, Y.D.; Shi, Z.; Jin, T.; Wu, X. Compressive sensing based coprime array direction-of-arrival estimation. IET Commun. 2017. [Google Scholar] [CrossRef]
- Qin, S.; Zhang, Y.D.; Amin, M.G. Generalized coprime array configurations for direction-of-arrival estimation. IEEE Trans. Signal Process. 2015, 63, 1377–1390. [Google Scholar] [CrossRef]
- Shen, Y.; Zhou, C.; Gu, Y.; Lin, H.; Shi, Z. Vandermonde decomposition of coprime coarray covariance matrix for DOA estimation. In Proceedings of the 18th IEEE International Workshop on Signal Processing Advances in Wireless Communications (SPAWC), Sapporo, Japan, 3–6 July 2017. [Google Scholar]
- Zhou, C.; Gu, Y.; He, S.; Shi, Z. A robust and efficient algorithm for coprime array adaptive beamforming. IEEE Trans. Veh. Technol. 2017. [Google Scholar] [CrossRef]
- Zhou, C.; Shi, Z.; Gu, Y. Coprime array adaptive beamforming with enhanced degrees-of-freedom capability. In Proceedings of the 2017 IEEE Radar Conference (RadarConf17), Seattle, WA, USA, 8–12 May 2017; pp. 1357–1361. [Google Scholar]
- Gu, Y.; Zhou, C.; Goodman, N.A.; Song, W.Z.; Shi, Z. Coprime array adaptive beamforming based on compressive sensing virtual array signal. In Proceedings of the 2016 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Shanghai, China, 20–25 March 2016; pp. 2981–2985. [Google Scholar]
- Zhou, C.; Gu, Y.; Song, W.Z.; Xie, Y.; Shi, Z. Robust adaptive beamforming based on DOA support using decomposed coprime subarrays. In Proceedings of the 2016 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Shanghai, China, 20–25 March 2016; pp. 2986–2990. [Google Scholar]
- Qin, S.; Zhang, Y.D.; Amin, M.G.; Zoubir, A.M. Generalized coprime sampling of Toeplitz matrices for spectrum estimation. IEEE Trans. Signal Process. 2017, 65, 81–94. [Google Scholar] [CrossRef]
- Zhou, C.; Shi, Z.; Gu, Y.; Goodman, N.A. DOA estimation by covariance matrix sparse reconstruction of coprime array. In Proceedings of the 2015 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Brisbane, Australia, 19–24 April 2015; pp. 2369–2373. [Google Scholar]
- Schmidt, R.O. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef]
- Pal, P.; Vaidyanathan, P.P. Coprime sampling and the MUSIC algorithm. In Proceedings of the IEEE Signal Processing Society 14th DSPWorkshop & 6th SPEWorkshop, Sedona, AZ, USA, 4–7 January 2011; pp. 289–294. [Google Scholar]
- Wu, X.; Zhu, W.P.; Yan, J.; Zhang, Z. Two sparse-based methods for off-grid direction-of-arrival estimation. Signal Process. 2017. [Google Scholar] [CrossRef]
- Zhang, Y.D.; Amin, M.G.; Himed, B. Sparsity-based DOA estimation using co-prime arrays. In Proceedings of the 2013 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Vancouver, Canada, 26–31 May 2013; pp. 3967–3971. [Google Scholar]
- Shi, Z.; Zhou, C.; Gu, Y.; Goodman, N.A.; Qu, F. Source estimation using coprime array: A sparse reconstruction perspective. IEEE Sens. J. 2017, 17, 755–765. [Google Scholar] [CrossRef]
- Liu, C.L.; Vaidyanathan, P.P.; Pal, P. Coprime coarray interpolation for DOA estimation via nuclear norm minimization. In Proceedings of the 2016 IEEE International Symposium on Circuits and Systems (ISCAS), Montréal, QC, Canada, 22–25 May 2016; pp. 2639–2642. [Google Scholar]
- Fan, X.; Zhou, C.; Gu, Y.; Shi, Z. Toeplitz matrix reconstruction of interpolated coprime virtual array for DOA estimation. In Proceedings of the IEEE 85th Vehicular Technology Conference: VTC2017-Spring, Sydney, Australia, 4–7 June 2017. [Google Scholar]
- Sun, F.; Gao, B.; Chen, L.; Lan, P. A low-complexity ESPRIT-based DOA estimation method for co-prime linear arrays. Sensors 2016, 16, 1367. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Jiang, D.; Zhang, X. DOA estimation based on combined unitary ESPRIT for coprime MIMO radar. IEEE Commun. Lett. 2017, 21, 96–99. [Google Scholar] [CrossRef]
- Zhou, C.; Shi, Z.; Gu, Y.; Shen, X. DECOM: DOA estimation with combined MUSIC for coprime array. In Proceedings of the 2013 International Conference on Wireless Communications and Signal Processing (WCSP), Hangzhou, China, 24–26 October 2013. [Google Scholar]
- Liu, C.L.; Vaidyanathan, P.P. Remarks on the spatial smoothing step in coarray MUSIC. IEEE Signal Process. Lett. 2015, 22, 1438–1442. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Step 1: Derive coarray domain statistics based on the coprime array received signals . |
| Step 2: Generate the coprime coarray covariance matrix via Equation (13). |
| Step 3: Construct the signal subspaces of the shift invariant subarray pair and via Equation (22). |
| Step 4: Obtain the rotational operator via Equation (28) based on the coarray domain rotational invariance. |
| Step 5: Calculate the DOA estimations via the closed-form solution in Equation (31). |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, C.; Zhou, J. Direction-of-Arrival Estimation with Coarray ESPRIT for Coprime Array. Sensors 2017, 17, 1779. https://doi.org/10.3390/s17081779
Zhou C, Zhou J. Direction-of-Arrival Estimation with Coarray ESPRIT for Coprime Array. Sensors. 2017; 17(8):1779. https://doi.org/10.3390/s17081779
Chicago/Turabian StyleZhou, Chengwei, and Jinfang Zhou. 2017. "Direction-of-Arrival Estimation with Coarray ESPRIT for Coprime Array" Sensors 17, no. 8: 1779. https://doi.org/10.3390/s17081779
APA StyleZhou, C., & Zhou, J. (2017). Direction-of-Arrival Estimation with Coarray ESPRIT for Coprime Array. Sensors, 17(8), 1779. https://doi.org/10.3390/s17081779