A Novel Cross-Layer Routing Protocol Based on Network Coding for Underwater Sensor Networks


Abstract
:1. Introduction
- Extended opportunistic receiving mode. We design a routing protocol with a primary path and several secondary nodes. The nodes in the network can not only receive packets from their previous hop nodes in the primary path, but also obtain encoded packets from long-distance nodes under certain probabilities. This design can make full use of multicast nature in underwater transmissions and save energy. The network is more robust to environment changes as multiple nodes can participate in one decoding procedure and the breakdown of a single node will not effect the network performance heavily.
- Based on the node mobility in underwater environment, we design a new route maintenance and update algorithm. The new algorithm can delete or add nodes when detecting inefficient transmissions without frequently updating neighborhood information with beacon messages. So packet collisions can be reduced and the route breakdown can be avoided. Moreover, data transmissions can be more efficient and thus energy consumption is decreased.
2. Related Works
3. Background
3.1. Channel Model
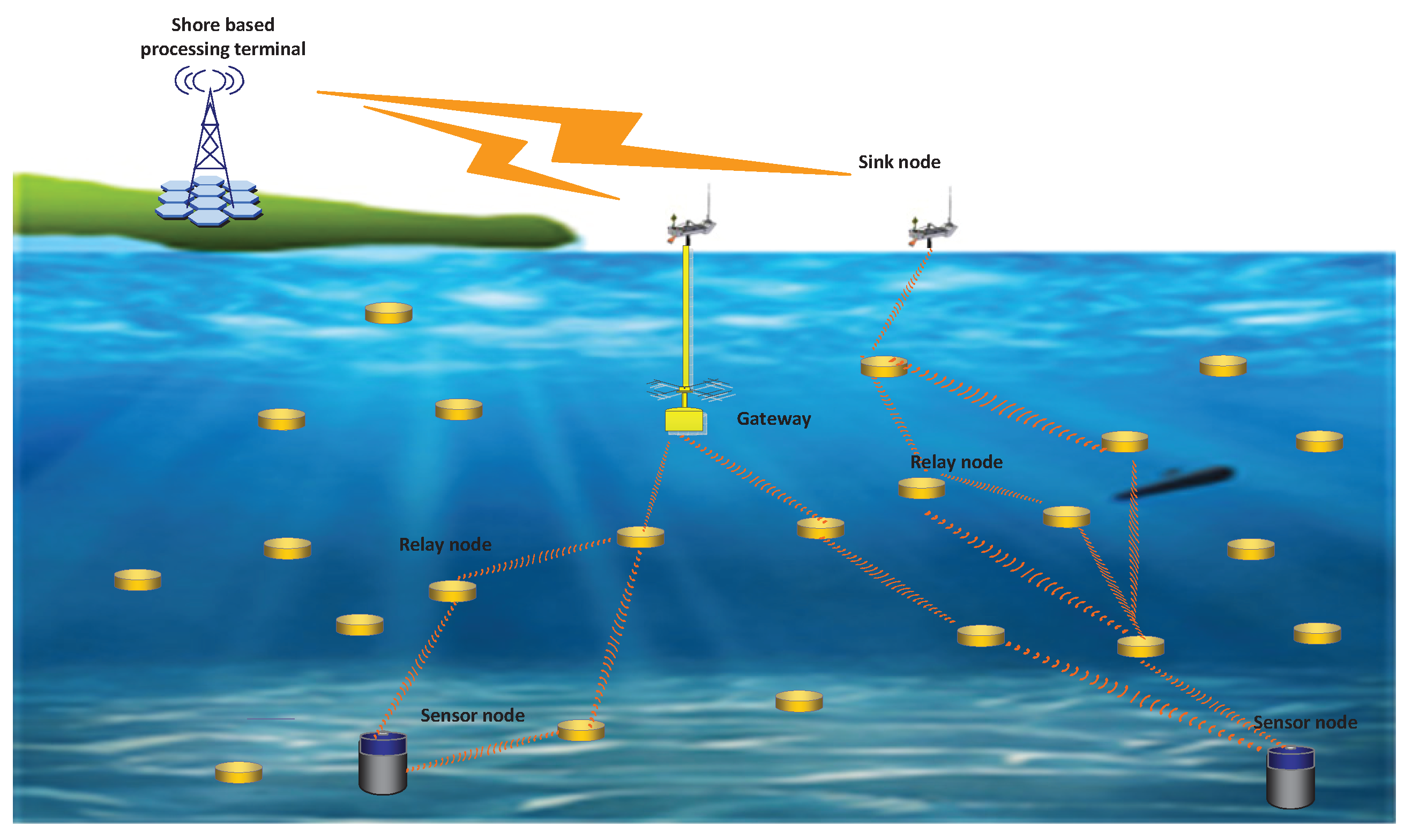
3.2. Network Model
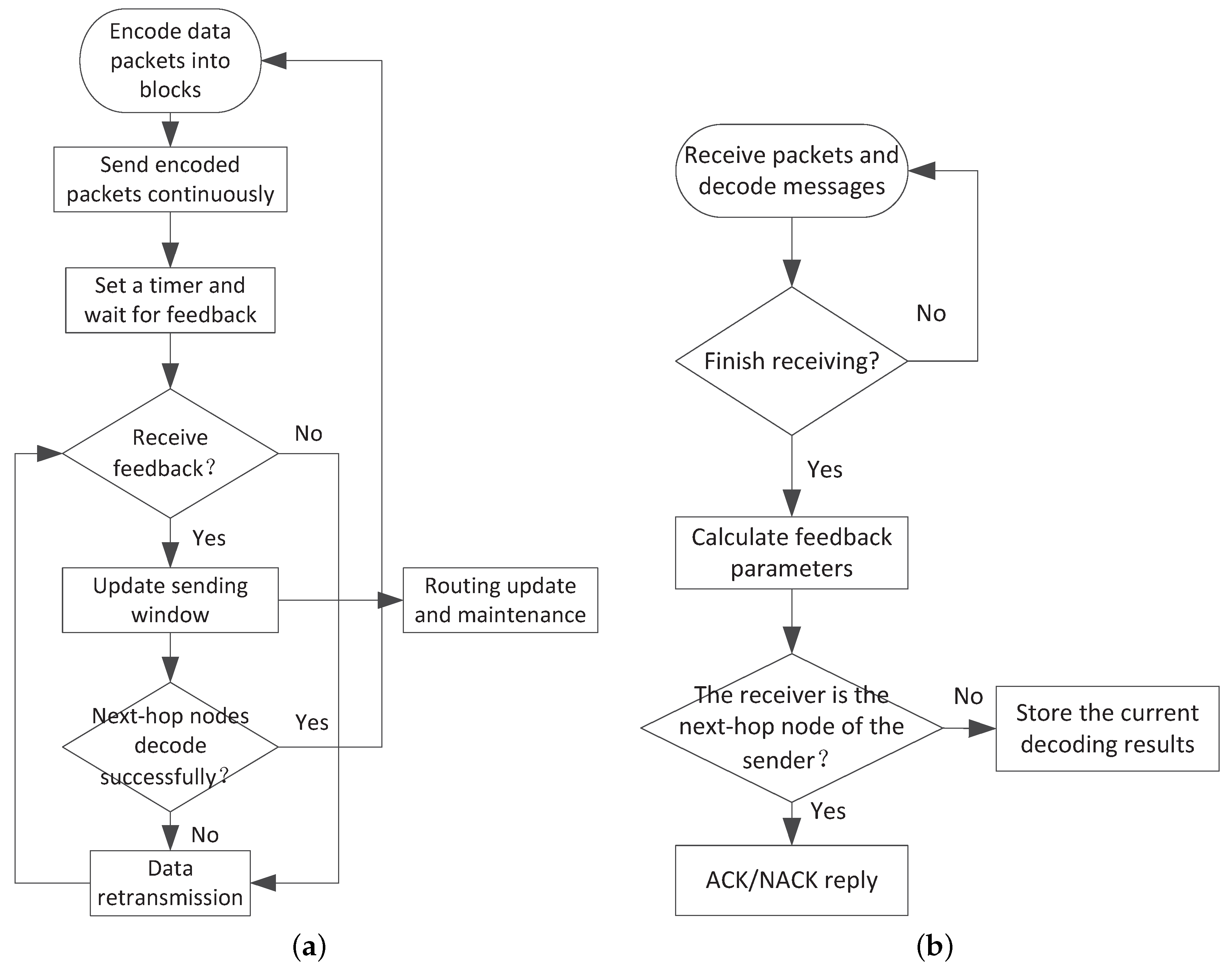
3.3. Overview of NCHARQ
4. Design of Network Coding Routing Protocol
4.1. Protocol Design Overview
4.2. Initial Routing Construction
| Algorithm 1 Routing Initialization |
|
| Algorithm 2 Beacon Process |
|
4.3. Network Coding Design
4.3.1. SLT Encoder
| Algorithm 3 SLT Encoder |
|
4.3.2. SLT Decoder
| Algorithm 4 SLT Decoder |
|
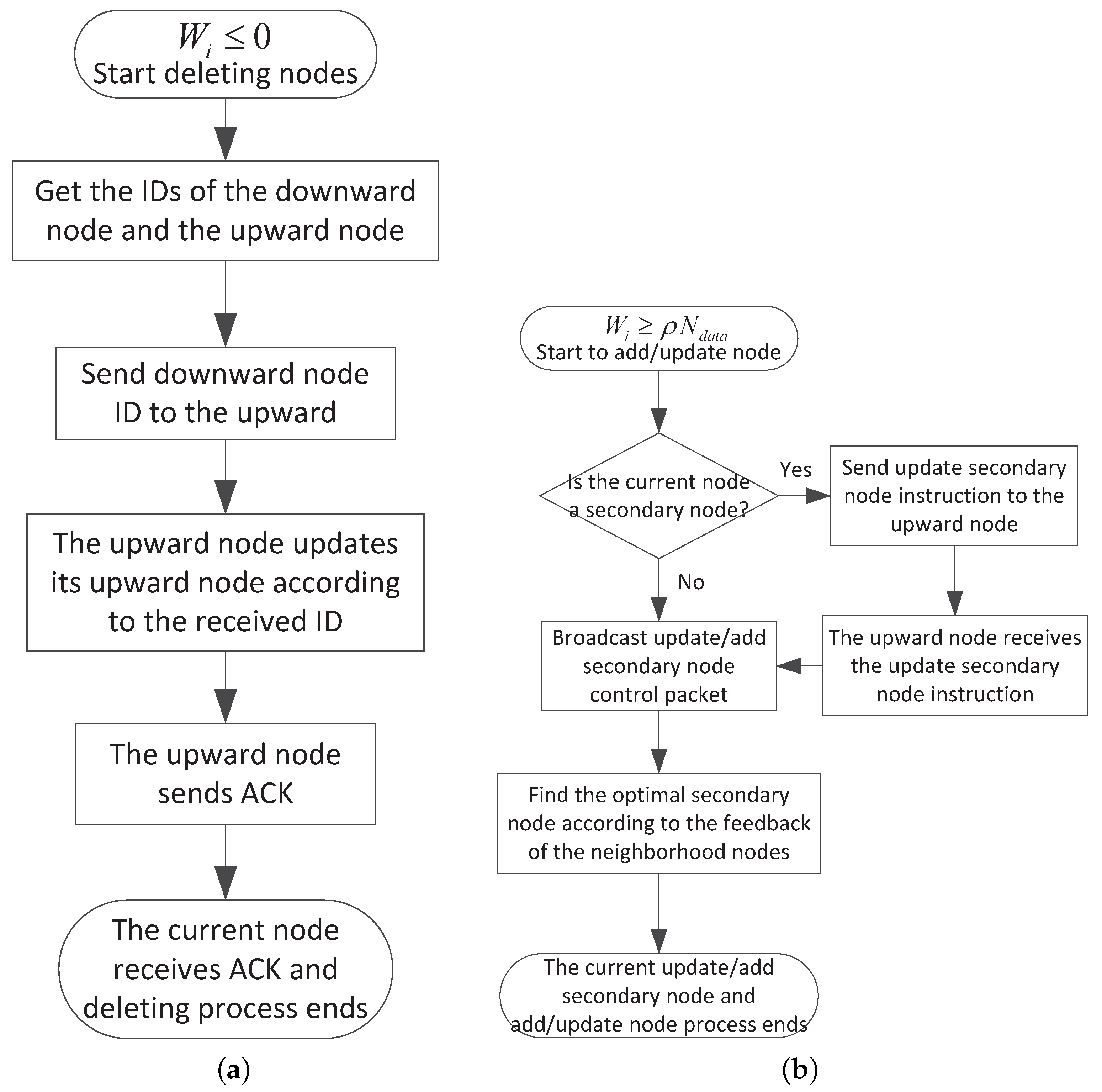
4.4. Routing Update and Maintenance
5. Performance Evaluation
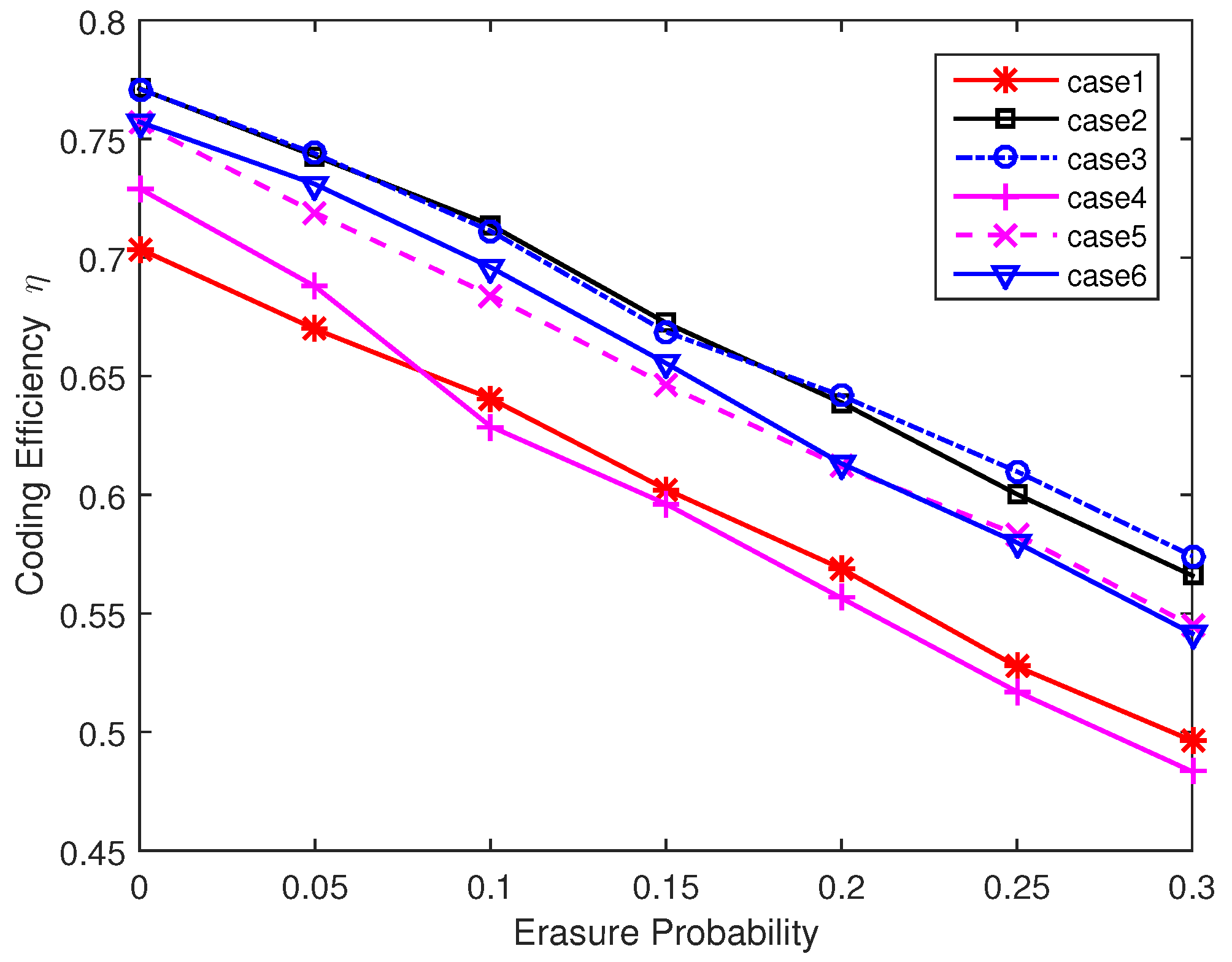
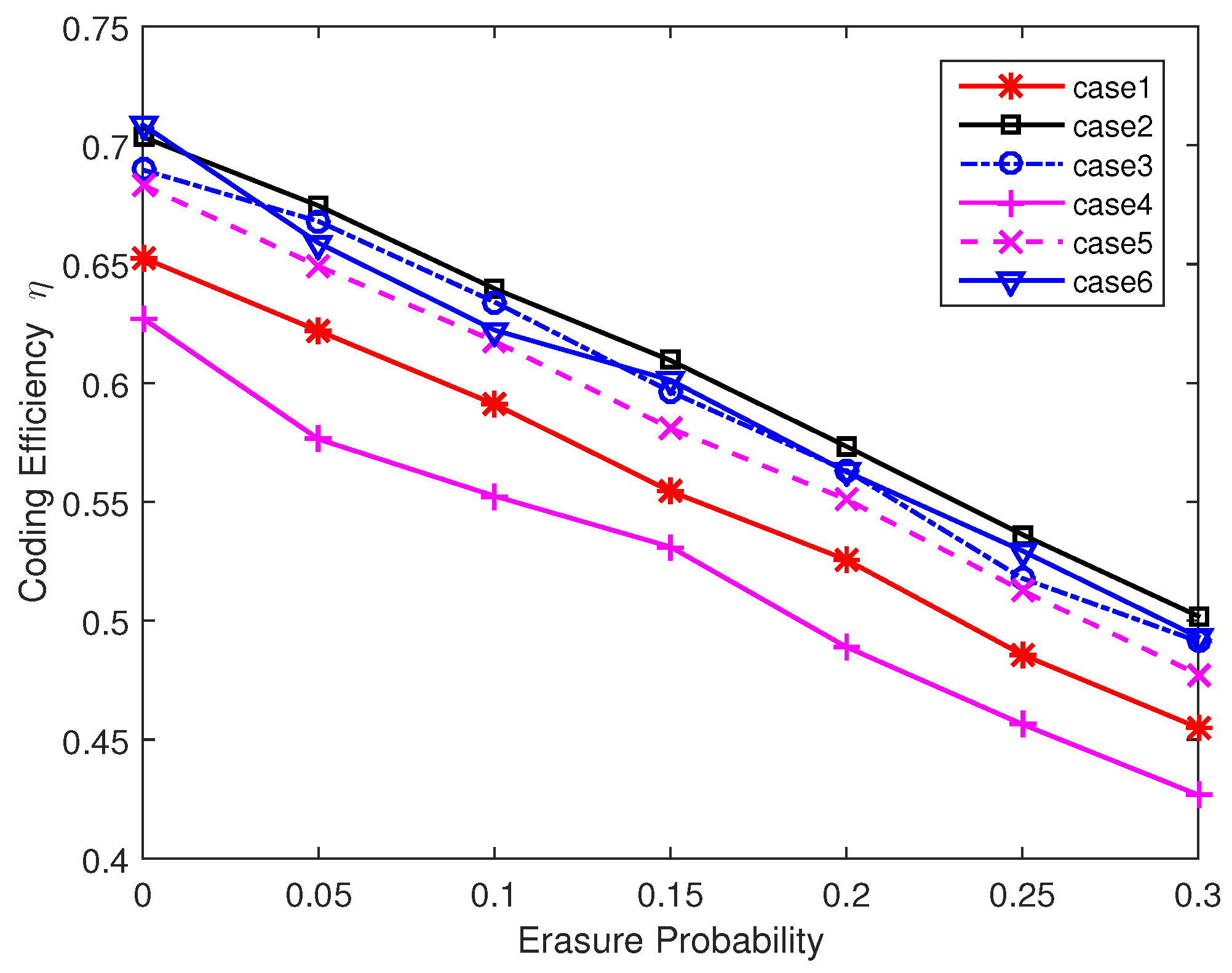
5.1. Effects of Degree Distribution
- Case 1: Degree value = [1 4 6], Degree probability distribution = [0.300 0.175 0.525], Average degree = 4.15, = 6.
- Case 2: Degree value = [1 4 6], Degree probability distribution = [0.400 0.175 0.425], Average degree = 3.65, = 6.
- Case 3: Degree value = [1 4 6], Degree probability distribution = [0.500 0.075 0.425], Average degree = 3.35, = 6.
- Case 4: Degree value = [1 4 6], Degree probability distribution = [0.600 0.175 0.325], Average degree = 3.25, = 6.
- Case 5: Degree value = [1 2 5 6], Degree probability distribution = [0.300 0.175 0.200 0.325], Average degree = 3.60, = 6.
- Case 6: Degree value = [1 4 6], Degree probability distribution = [0.500 0.075 0.425], Average degree = 3.35, = 8.
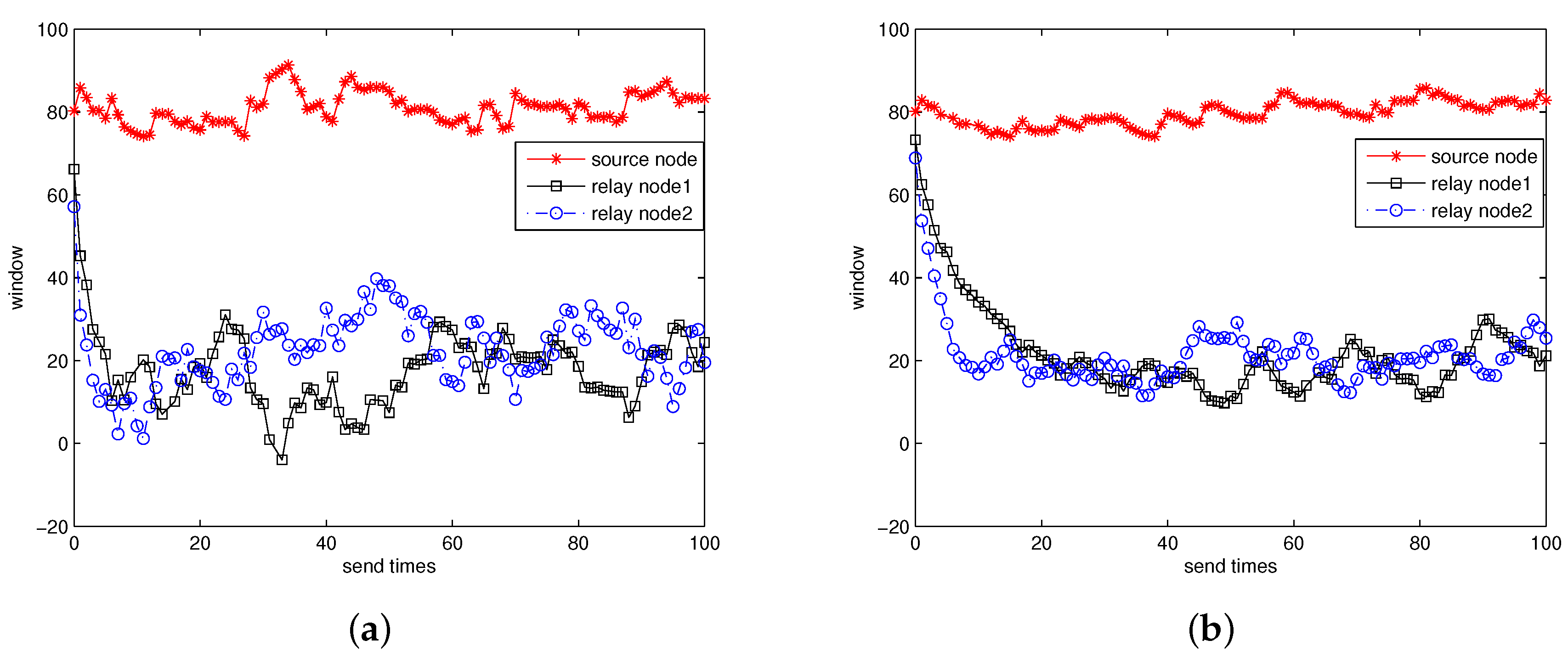
5.2. Effects of Loop Filter Parameters
- Case 1: .
- Case 2: .
- Case 3: .
- Case 4: .
- Case 5: .
5.3. Performance Analysis
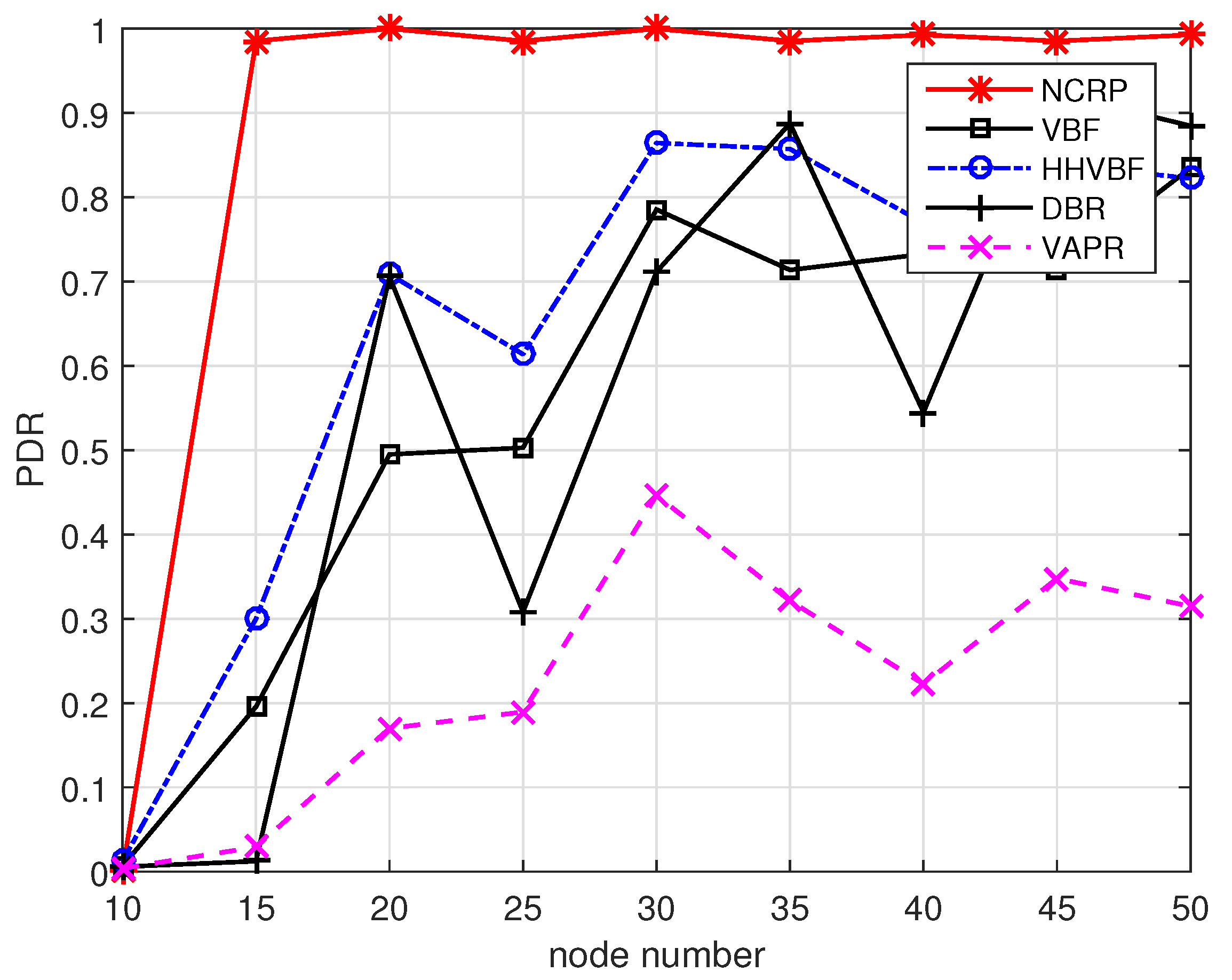
- Packet delivery ratio (): This metric is defined as in Equation (11)
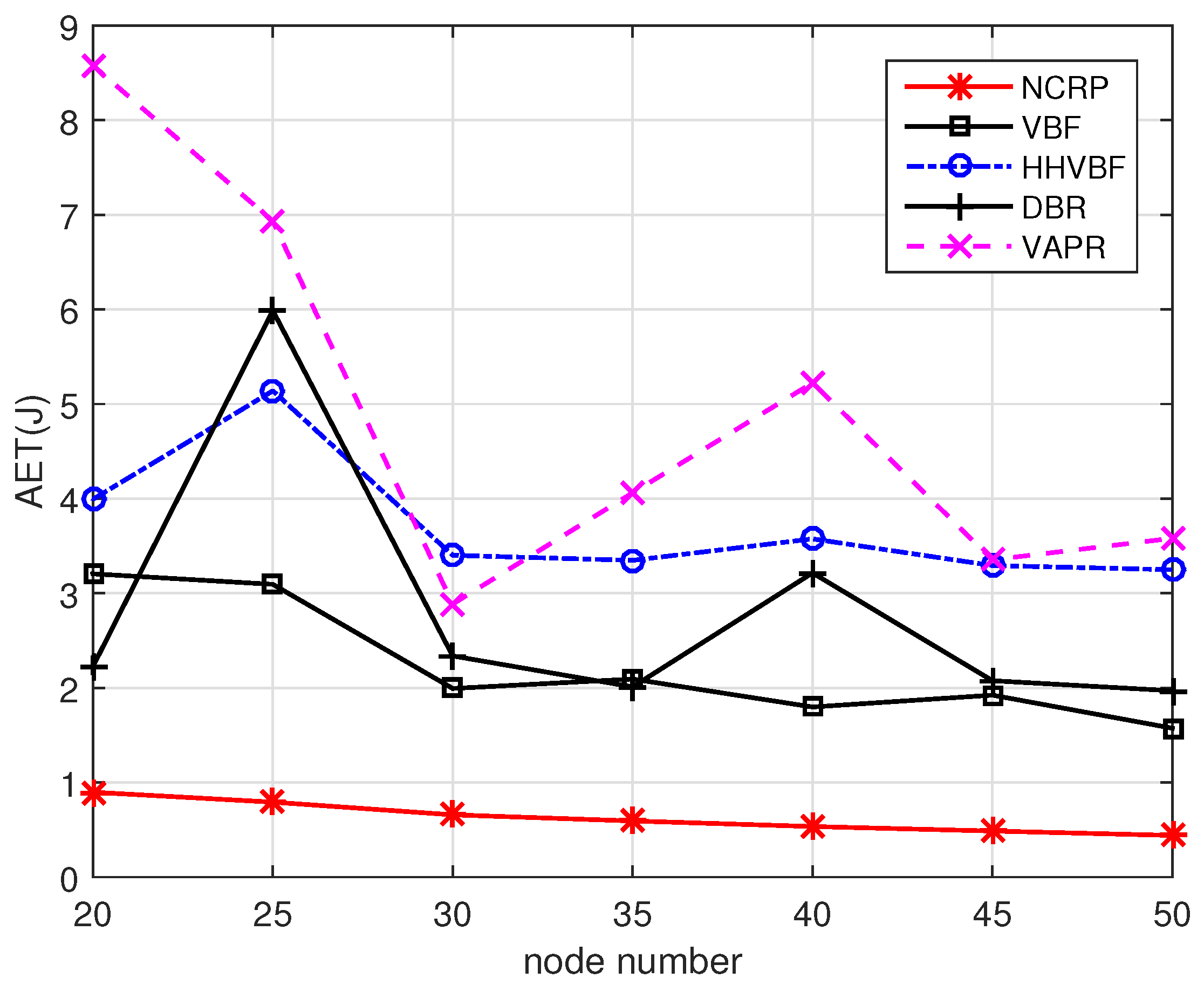
- Average energy tax (): is defined as the average energy consumption in each node for delivering a packet successfully as in Equation (12).
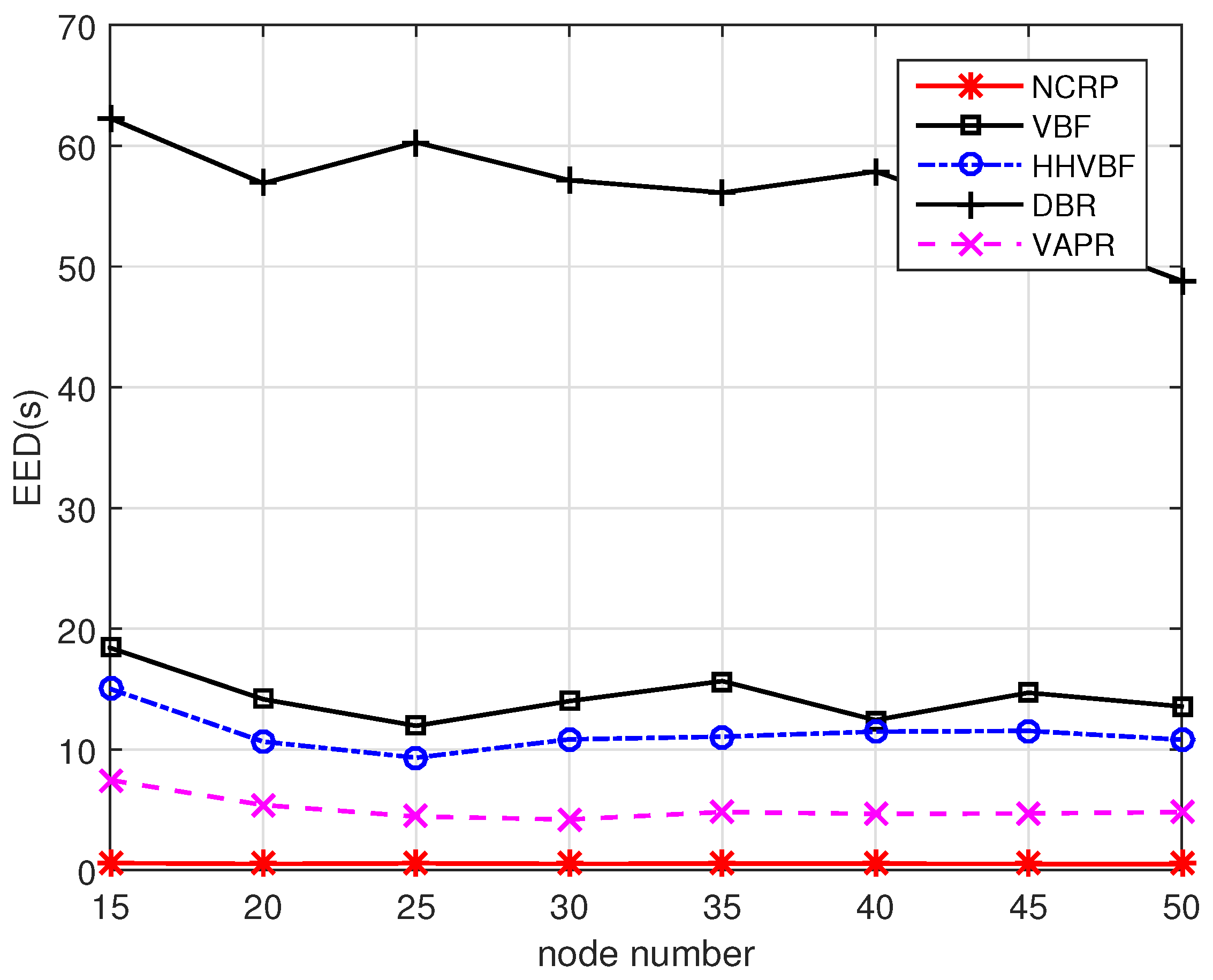
- Average end-to-end delay (): is defined as the average time it takes for sending a packets from the source node to the destination successfully.
6. Conclusions
Author Contributions
Conflicts of Interest
References
- Climent, S.; Sanchez, A.; Capella, J.V.; Meratnia, N.; Serrano, J.J. Underwater acoustic wireless sensor networks: Advances and future trends in physical, MAC and routing layers. Sensors 2014, 14, 795–833. [Google Scholar] [CrossRef] [PubMed]
- Akyildiz, I.F.; Pompili, D.; Melodia, T. Underwater acoustic sensor networks: Research challenges. Ad Hoc Netw. 2005, 3, 257–279. [Google Scholar] [CrossRef]
- Wu, H.; Chen, M.; Guan, X. A network coding based routing protocol for underwater sensor networks. Sensors 2012, 12, 4559–4577. [Google Scholar] [CrossRef] [PubMed]
- Melodia, T.; Kulhandjian, H.; Kuo, L.C.; Demirors, E. Advances in underwater acoustic networking. In Mobile Ad Hoc Networking: Cutting Edge Directions; Wiley: Hoboken, NJ, USA, 2013; pp. 804–852. [Google Scholar]
- Li, N.; Martínez, J.F.; Meneses Chaus, J.M.; Eckert, M. A Survey on Underwater Acoustic Sensor Network Routing Protocols. Sensors 2016, 16, 414. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Garcia, M.; Sendra, S.; Atenas, M.; Lloret, J. Underwater wireless ad-hoc networks: A survey. In Mobile Ad Hoc Networks: Current Status and Future Trends; CRC Press: Boca Raton, FL, USA, 2016; pp. 379–411. [Google Scholar]
- Tariq, M.; Latiff, M.S.A.; Ayaz, M.; Coulibaly, Y.; Wahid, A. Pressure Sensor Based Reliable (PSBR) Routing Protocol for Underwater Acoustic Sensor Networks. Ad Hoc Sens. Wirel. Netw. 2016, 32, 175–196. [Google Scholar]
- Lloret, J.; Sendra, S.; Ardid, M.; Rodrigues, J.J. Underwater wireless sensor communications in the 2.4 GHz ISM frequency band. Sensors 2012, 12, 4237–4264. [Google Scholar] [CrossRef] [PubMed]
- Ghoreyshi, S.M.; Shahrabi, A.; Boutaleb, T. A Novel Cooperative Opportunistic Routing Scheme for Underwater Sensor Networks. Sensors 2016, 16, 297. [Google Scholar] [CrossRef] [PubMed]
- Yan, H.; Shi, Z.J.; Cui, J.H. DBR: Depth-based routing for underwater sensor networks. In NETWORKING 2008 Ad Hoc and Sensor Networks, Wireless Networks, Next Generation Internet; Springer: New York, NY, USA, 2008; pp. 72–86. [Google Scholar]
- Xie, P.; Cui, J.H.; Lao, L. VBF: Vector-based forwarding protocol for underwater sensor networks. In Networking 2006. Networking Technologies, Services, and Protocols; Performance of Computer and Communication Networks; Mobile and Wireless Communications Systems; Springer: New York, NY, USA, 2006; pp. 1216–1221. [Google Scholar]
- Nicolaou, N.; See, A.; Xie, P.; Cui, J.H.; Maggiorini, D. Improving the robustness of location-based routing for underwater sensor networks. In Proceedings of the IEEE Oceans 2007, Aberdeen, UK, 18–21 June 2007; pp. 1–6. [Google Scholar]
- Coutinho, R.; Boukerche, A.; Vieira, L.M.; Loureiro, A. Geographic and Opportunistic Routing for Underwater Sensor Networks. IEEE Trans. Comput. 2016, 65, 548–561. [Google Scholar] [CrossRef]
- Guo, Z.; Wang, B.; Xie, P.; Zeng, W.; Cui, J.H. Efficient error recovery with network coding in underwater sensor networks. Ad Hoc Netw. 2009, 7, 791–802. [Google Scholar] [CrossRef]
- Cai, S.; Yao, N.; Gao, Z. A reliable data transfer protocol based on twin paths and network coding for underwater acoustic sensor network. EURASIP J. Wirel. Commun. Netw. 2015, 2015, 1–6. [Google Scholar] [CrossRef]
- Wang, H.; Wang, S.; Zhang, E.; Zou, J. A Network Coding Based Hybrid ARQ Protocol for Underwater Acoustic Sensor Networks. Sensors 2016, 16, 1444. [Google Scholar] [CrossRef] [PubMed]
- Noh, Y.; Lee, U.; Lee, S.; Wang, P.; Vieira, L.F.M.; Cui, J.H.; Gerla, M.; Kim, K. HydroCast: Pressure Routing for Underwater Sensor Networks. IEEE Trans. Veh. Technol. 2016, 65, 333–347. [Google Scholar] [CrossRef]
- Noh, Y.; Lee, U.; Wang, P.; Choi, B.S.C.; Gerla, M. VAPR: Void-aware pressure routing for underwater sensor networks. IEEE Trans. Mob. Comput. 2013, 12, 895–908. [Google Scholar] [CrossRef]
- Yu, H.; Yao, N.; Wang, T.; Li, G.; Gao, Z.; Tan, G. WDFAD-DBR: Weighting depth and forwarding area division DBR routing protocol for UASNs. Ad Hoc Netw. 2016, 37, 256–282. [Google Scholar] [CrossRef]
- Jornet, J.M.; Stojanovic, M.; Zorzi, M. Focused beam routing protocol for underwater acoustic networks. In Proceedings of the third ACM international workshop on Underwater Networks, San Francisco, CA, USA, 14–19 September 2008; pp. 75–82. [Google Scholar]
- Basagni, S.; Petrioli, C.; Petroccia, R.; Spaccini, D. CARP: A channel-aware routing protocol for underwater acoustic wireless networks. Ad Hoc Netw. 2015, 34, 92–104. [Google Scholar] [CrossRef]
- Urick, R. Principles of Underwater Sound for Engineers; Tata McGraw-Hill Education: New Delhi, India, 1967. [Google Scholar]
- Brekhovskikh, L.M.; Beyer, A.R.T. Fundamentals of Ocean Acoustics. J. Acoust. Soc. Am. 1991, 90, 3382–3383. [Google Scholar] [CrossRef]
- Wenz, G.M. Acoustic ambient noise in the ocean: Spectra and sources. J. Acoust. Soc. Am. 1962, 34, 1936–1956. [Google Scholar] [CrossRef]
- Goldsmith, A. Wireless Communications; Cambridge University Press: Cambridge, UK, 2005. [Google Scholar]
- Parrish, N.; Tracy, L.; Roy, S.; Arabshahi, P.; Fox, W.L. System design considerations for undersea networks: Link and multiple access protocols. IEEE J. Sel. Areas Commun. 2008, 26. [Google Scholar] [CrossRef]
- Ho, T.; Koetter, R.; Medard, M.; Karger, D.R.; Effros, M. The benefits of coding over routing in a randomized setting. In Proceedings of the IEEE International Symposium on Information Theory, Yokohama, Japan, 29 June–4 July 2003; p. 442. [Google Scholar]
- Luby, M.G.; Mitzenmacher, M.; Shokrollahi, M.A.; Spielman, D.A.; Stemann, V. Practical loss-resilient codes. In Proceedings of the twenty-ninth annual ACM symposium on Theory of computing, El Paso, TX, USA, 4–6 May 1997; pp. 150–159. [Google Scholar]
- Costello, D.; Lin, S. Error Control Coding; Prentice Hall: Upper Saddle River, NJ, USA, 2004. [Google Scholar]
- Shokrollahi, A. Raptor codes. IEEE Trans. Inf. Theor. 2006, 52, 2551–2567. [Google Scholar] [CrossRef]
- Xie, P.; Zhou, Z.; Peng, Z.; Cui, J.H.; Shi, Z. SDRT: A reliable data transport protocol for underwater sensor networks. Ad Hoc Netw. 2010, 8, 708–722. [Google Scholar] [CrossRef]
- Das, A.P.; Thampi, S.M. Simulation tools for underwater sensor networks: A survey. Netw. Protoc. Algorithms 2017, 8, 41–55. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Data Rate | 10 kbps |
| Center Frequency | 12 kHz |
| Bandwidth | 10 kHz |
| Mode Type | |
| Packet Error Rate Model | |
| Signal Noise Model | |
| Acoustic Propagation Speed | 1500 m/s |
| UAN Propagation Model | |
| MAC Model | |
| Mobility Model | (speed: 2∼4 m/s, directions are choosen randomly) |
| Energy Model | (TX: 50 W, RX/Idle:158 mW, Sleep:5.8 mW) |
| Transmission Output Power | 147 dB Pa |
| Required SNR for Signal Acquisition | 10 dB Pa |
| Payload of DATA | 64 Bytes |
| Number of Data Packets in Each Block | 60 |
| Deployment Region | 3D region of 1.5 × 1.5 × 1 (length × breadth × depth) km3 |
| Node Number | 10–50, nodes are randomly deployed |
| Sink Node Position | m |
| Source Node Position | m |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, H.; Wang, S.; Bu, R.; Zhang, E. A Novel Cross-Layer Routing Protocol Based on Network Coding for Underwater Sensor Networks. Sensors 2017, 17, 1821. https://doi.org/10.3390/s17081821
Wang H, Wang S, Bu R, Zhang E. A Novel Cross-Layer Routing Protocol Based on Network Coding for Underwater Sensor Networks. Sensors. 2017; 17(8):1821. https://doi.org/10.3390/s17081821
Chicago/Turabian StyleWang, Hao, Shilian Wang, Renfei Bu, and Eryang Zhang. 2017. "A Novel Cross-Layer Routing Protocol Based on Network Coding for Underwater Sensor Networks" Sensors 17, no. 8: 1821. https://doi.org/10.3390/s17081821
APA StyleWang, H., Wang, S., Bu, R., & Zhang, E. (2017). A Novel Cross-Layer Routing Protocol Based on Network Coding for Underwater Sensor Networks. Sensors, 17(8), 1821. https://doi.org/10.3390/s17081821