On Optimal Cooperative Sensing with Energy Detection in Cognitive Radio




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
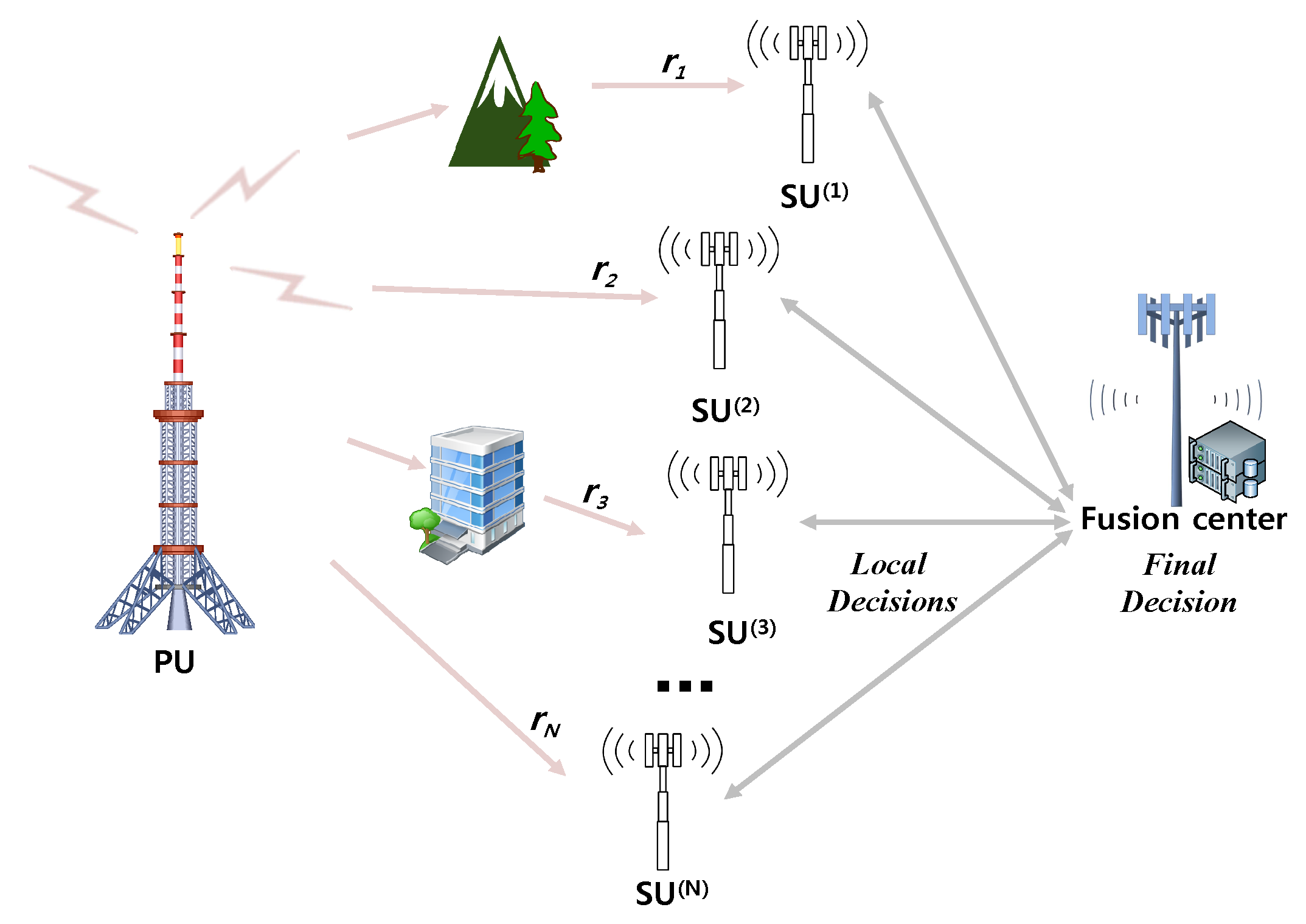
2. System Model
2.1. Cognitive Radio System
2.2. Energy Detection and Sensing Performance Metrics
2.3. Problem Formulation of Cooperative Sensing
3. Cooperative Sensing with Optimal Thresholds
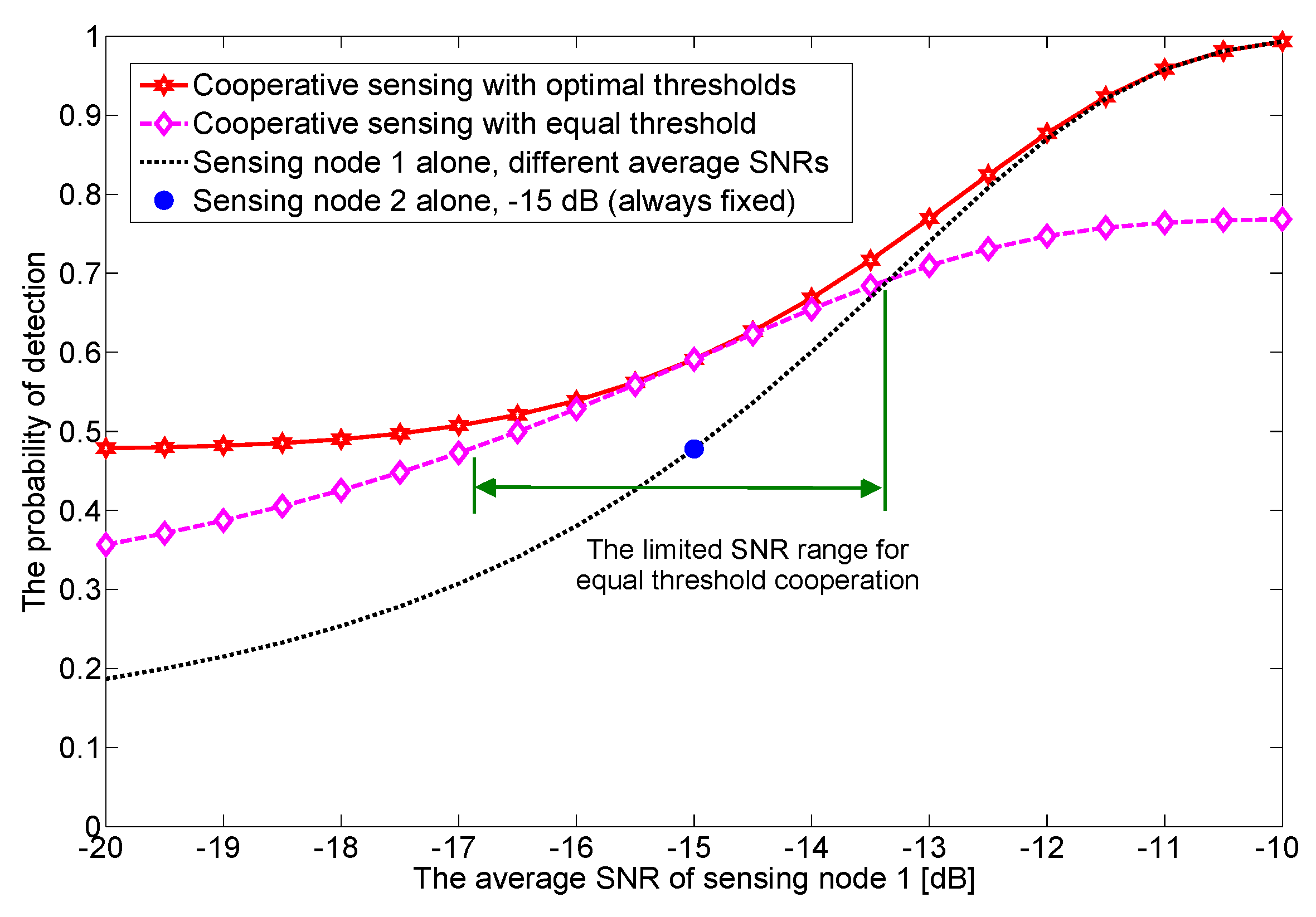
3.1. Limitation of Equal Threshold—A Motivating Example with Two Sensing Nodes
3.2. Cooperative Sensing with Optimal Thresholds
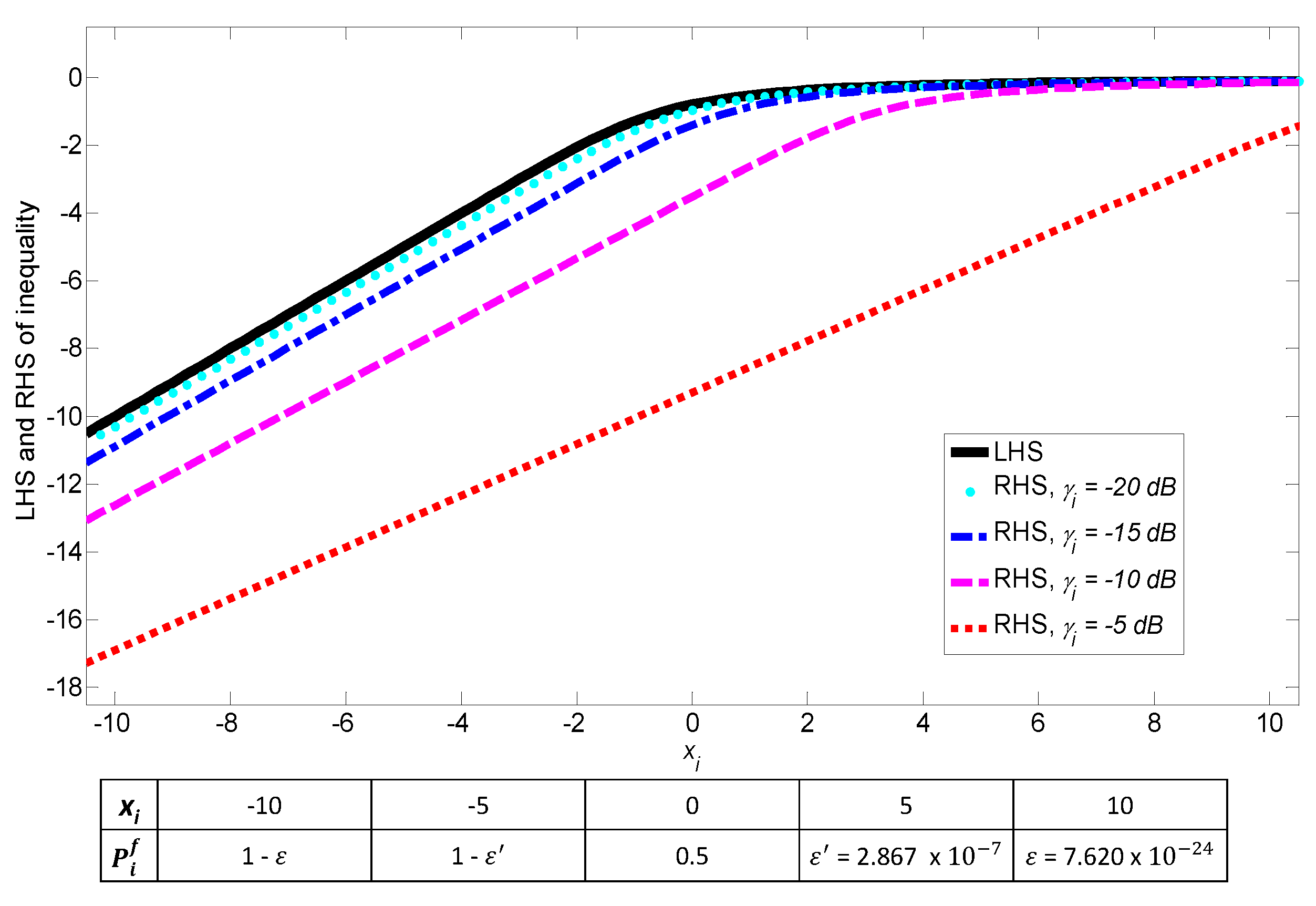
3.3. Convex Optimization
| Algorithm 1: Find the globally optimal and for (10). |
| Input: Given N, , B, , and for all i. |
| 1: Set initial and . |
| 2: Calculate and for all i. |
| 3: while do |
| 4: |
| 5: Given , solve (10) to compute for all i. |
| 6: If , then set , else set . |
| 7: end while. |
| Output: Calculate (and also ), and obtain the maximum in (6) and (7). |
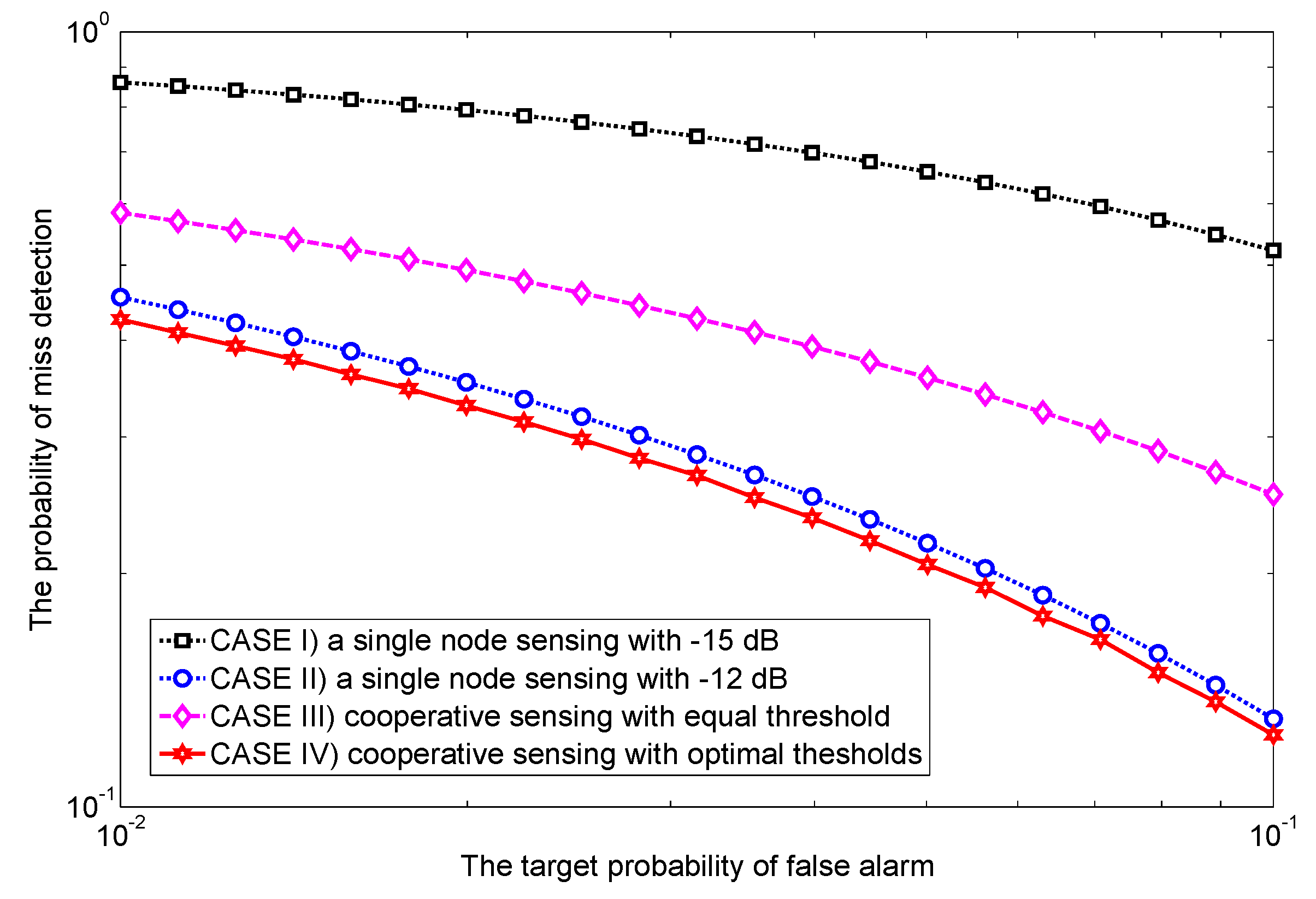
4. Numerical Results
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A
References
- Haykin, S. Cognitive radio: Brain-empowered wireless communications. IEEE J. Select. Areas Commun. 2005, 23, 201–220. [Google Scholar] [CrossRef]
- Forde, T.; Doyle, L. A TV whitespace ecosystem for licensed cognitive radio. Telecommun. Policy 2013, 37, 130–139. [Google Scholar] [CrossRef]
- Sum, C.-S.; Villardi, G.P.; Rahman, M.A.; Baykas, T.; Tran, H.N.; Lan, Z.; Sun, C.; Alemseged, Y.; Wang, J.; Song, C. Cognitive communication in TV white spaces: An overview of regulations, standards, and technology. IEEE Commun. Mag. 2013, 51, 138–145. [Google Scholar] [CrossRef]
- Ghassemi, A.; Bavarian, S.; Lampe, L. Cognitive radio for smart grid communications. In Proceedings of the 2010 First IEEE International Conference on Smart Grid Communications (SmartGridComm), Gaithersburg, MD, USA, 4–6 October 2010. [Google Scholar]
- Xiao, J.; Hu, R.Q.; Qian, Y.; Gong, L.; Wang, B. Expanding LTE network spectrum with cognitive radios: From concept to implementation. IEEE Wirel. Commun. 2013, 20, 12–19. [Google Scholar] [CrossRef]
- Ratasuk, R.; Mangalvedhe, N.; Ghosh, A. LTE in unlicensed spectrum using licensed-assisted access. In Proceedings of the 2014 Globecom Workshops (GC Wkshps), Austin, TX, USA, 8–12 December 2014. [Google Scholar]
- Akyildiz, I.F.; Lo, B.F.; Balakrishnan, R. Cooperative spectrum sensing in cognitive radio networks: A survey. Phys. Commun. 2011, 4, 772–776. [Google Scholar] [CrossRef]
- Urkowitz, H. Energy detection of unknown deterministic signals. Proc. IEEE 1967, 55, 523–531. [Google Scholar] [CrossRef]
- Yucek, T.; Arslan, H. A survey of spectrum sensing algorithms for cognitive radio applications. IEEE Commun. Surv. Tutor. 2009, 11, 116–130. [Google Scholar] [CrossRef]
- Axell, E.; Leus, G.; Larsson, E.G.; Poor, H.V. Spectrum sensing for cognitive radio: State-of-the-art and recent advances. IEEE Signal Process. Mag. 2012, 29, 101–116. [Google Scholar] [CrossRef]
- Liang, Y.-C.; Zeng, Y.; Peh, E.C.Y.; Hoang, A.T. Sensing-throughput tradeoff for cognitive radio networks. IEEE Trans. Wirel. Commun. 2008, 7, 1326–1337. [Google Scholar] [CrossRef]
- So, J. Opportunistic reporting-based sensing-reporting-throughput optimization scheme for cooperative cognitive radio networks. KSII Trans. Internet Inf. Syst. 2017, 11, 1319–1355. [Google Scholar]
- Bae, S.; Kim, H. Unlimited cooperative sensing with energy detection for cognitive radio. J. Commun. Netw. 2014, 16, 172–182. [Google Scholar] [CrossRef]
- Shen, J.; Liu, S.; Zeng, L.; Xie, G.; Gao, J.; Liu, Y. Optimisation of cooperative spectrum sensing in cognitive radio network. IET Commun. 2009, 3, 1170–1178. [Google Scholar] [CrossRef]
- Peh, E.C.Y.; Liang, Y.-C.; Guan, Y.L.; Zeng, Y. Optimization of cooperative sensing in cognitive radio networks: A sensing-throughput tradeoff view. IEEE Trans. Veh. Technol. 2009, 58, 5294–5299. [Google Scholar] [CrossRef]
- Zhang, W.; Mallik, R.; Letaief, K. Optimization of cooperative spectrum sensing with energy detection in cognitive radio networks. IEEE Trans. Wirel. Commun. 2009, 8, 5761–5766. [Google Scholar] [CrossRef]
- Liu, Y.; Zeng, C.; Wang, H.; Wei, G. Energy detection threshold optimization for cooperative spectrum sensing. In Proceedings of the 2010 2nd International Conference on Advanced Computer Control (ICACC), Shenyang, China, 27–29 March 2010. [Google Scholar]
- Bae, S.; Kim, H. Robust cooperative sensing with on/off signaling over imperfect reporting channels. IEEE Trans. Ind. Informat. 2016, 12, 2196–2205. [Google Scholar] [CrossRef]
- Peh, E.C.Y.; Liang, Y.-C. Optimization for cooperative sensing incognitive radio networks. In Proceedings of the IEEE Wireless Communications and Networking Conference, Kowloon, Hongkong, China, 11–15 March 2007. [Google Scholar]
- Teo, D.; Zhong, K.; Ng, B.-C. An iterative threshold selection algorithm for cooperative sensing in a cognitive radio network. In Proceedings of the 2010 IEEE Symposium on New Frontiers in Dynamic Spectrum, Singapore, 6–9 April 2010. [Google Scholar]
- Peh, E.C.Y.; Liang, Y.-C.; Guan, Y.L.; Zeng, Y. Cooperative spectrum sensing in cognitive radio networks with weighted decision fusion schemes. IEEE Trans. Wirel. Commun. 2010, 9, 3838–3847. [Google Scholar] [CrossRef]
- Lai, J.; Dutkiewicz, E.; Liu, R.-P.; Vesilo, R. Cooperative sensing with detection threshold optimization in cognitive radio networks. In Proceedings of the 2012 International Symposium on Communications and Information Technologies (ISCIT), Gold Coast, Australia, 2–5 October 2012. [Google Scholar]
- Lai, J.; Dutkiewicz, E.; Liu, R.-P.; Vesilo, R. Performance optimization of cooperative spectrum sensing in cognitive radio networks. In Proceedings of the 2013 IEEE Wireless Communications and Networking Conference (WCNC), Shanghai, China, 7–10 April 2013. [Google Scholar]
- Liu, X.; Jia, M.; Tan, X. Threshold optimization of cooperative spectrum sensing in cognitive radio networks. Radio Sci. 2013, 48, 23–32. [Google Scholar] [CrossRef]
- Ghasemi, A.; Sousa, E.S. Collaborative spectrum sensing for opportunistic access in fading environments. In Proceedings of the 2005 First IEEE International Symposium on New Frontiers in Dynamic Spectrum Access Networks (DySPAN 2005), Baltimore, MD, USA, 8–11 November 2005. [Google Scholar]
- Tang, L.; Chen, Y.; Hines, E.L.; Alouini, M.-S. Effect of primary user traffic on sensing-throughput tradeoff for cognitive radios. IEEE Trans. Wirel. Commun. 2011, 10, 1063–1068. [Google Scholar] [CrossRef]
- Düzenli, T.; Akay, O. A new spectrum sensing strategy for dynamic primary users in cognitive radio. IEEE Commun. Lett. 2016, 20, 752–755. [Google Scholar] [CrossRef]
- Chaudhari, S.; Lunden, J.; Koivunen, V.; Poor, H.V. Cooperative sensing with imperfect reporting channels: Hard decisions or soft decisions? IEEE Trans. Signal Process. 2012, 60, 18–28. [Google Scholar] [CrossRef]
- Boyd, S.; Vandenberghe, L. Convex Optimization; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Larson, R.; Edwards, B.H. Calculus, 9th ed.; Cengage Learning, Inc.: Boston, MA, USA, 2010. [Google Scholar]








© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bae, S.; So, J.; Kim, H. On Optimal Cooperative Sensing with Energy Detection in Cognitive Radio. Sensors 2017, 17, 2111. https://doi.org/10.3390/s17092111
Bae S, So J, Kim H. On Optimal Cooperative Sensing with Energy Detection in Cognitive Radio. Sensors. 2017; 17(9):2111. https://doi.org/10.3390/s17092111
Chicago/Turabian StyleBae, Sunghwan, Jaewoo So, and Hongseok Kim. 2017. "On Optimal Cooperative Sensing with Energy Detection in Cognitive Radio" Sensors 17, no. 9: 2111. https://doi.org/10.3390/s17092111
APA StyleBae, S., So, J., & Kim, H. (2017). On Optimal Cooperative Sensing with Energy Detection in Cognitive Radio. Sensors, 17(9), 2111. https://doi.org/10.3390/s17092111