1. Introduction
The detection and classification of short-circuit faults in power transmission lines are the basis for accurately judging the fault phase. The accurate removal of the fault phase reduces the further negative impact of the failure in the power system. It is very useful for enhancing the stability of the power system, boosting the transient stability of the system, and improving the quality of the power supply [
1,
2].
Having a method to accurately and efficiently classify short-circuit faults is the basis of fault clearance for power transmission lines. Fault voltage signals achieved from the sensors of photoelectric voltage transformers contain various transient components due to uncertain factors, such as fault location, fault time, and transition resistance of transmission lines. It is useful but complex to analyze and recognize these fault voltage signals. Generally, classification of short-circuit faults based on the voltage signals include three steps: signal processing, feature extraction, and pattern recognition.
Signal processing is the basis of classifying short-circuit faults. The time-frequency analysis approach is commonly used in the processing of short-circuit fault signals, which mainly includes the wavelet transform (WT) [
3,
4]; wavelet packet transform (WPT) [
5,
6]; S-transform (ST) [
7,
8]; empirical mode decomposition (EMD) [
9]; ensemble empirical mode decomposition (EEMD) [
10,
11]; ensemble empirical mode decomposition (EEMD); complete ensemble empirical mode decomposition with adaptive noise (CEEMDAN) [
12]; and improved complete ensemble empirical mode decomposition with adaptive noise (Improved CEEMDAN) [
13]. WT and WPT are more capable of analyzing the time frequency of signals. However, they still have limitations such as being easily influenced by noise, limited frequency resolution in high-frequency parts as well as difficulty in selecting the mother wavelet function and decomposition scale [
1,
14]. ST has good time-frequency resolution and noise immunity, but ST also has a very high computation complexity. Therefore, it is difficult to analyze fault signals at a high sampling rate. Compared with the WT, WPT, and ST methods, the EMD method has advanced adaptability. As it can adaptively decompose the non-linear and non-stationary signals into several intrinsic mode functions (IMFs), which reflect components at different frequencies. It is considerably more convenient to extract the features of fault signals from IMFs. However, EMD has some limitations due to mode mixing, pseudomode, and so on. The EEMD method has a higher time-frequency resolution than the EMD and retains the problem of mode mixing. Furthermore, the reconstructed signal and the final trend of EEMD contains residual noise, while different realizations of the signal and noise generates different numbers of modes. The CEEMDAN method proposed in a previous reference [
12] was proved to be a significant improvement of EEMD, which realizes a small reconstruction error and solves the problem of generating a different number of modes by adding different noise to signals. However, the CEEMDAN method still has some problems, such as residual noise contained in its modes. In order to solve these problems of CEEMDAN, the improved CEEMDAN method was proposed by reference [
13]. The empirical wavelet transform (EWT) is a new adaptive signal processing method [
15], which combines the adaptability of EMD with a wavelet decomposition framework. Compared to EMD and its improved methods, EWT has the following advantages:
EWT decomposes the signal spectrum adaptively, and constructs orthogonal wavelet filter banks to extract amplitude modulated-frequency modulated (AM-FM) components with a compactly supported Fourier spectrum. Therefore, it can accurately decompose the short-circuit fault signals into IMFs to avoid mode mixing.
The EWT approach has been proven by the classical wavelet theory. However, the orthogonality of IMFs obtained by the EMD method has not been shown in previous studies.
IMFs obtained by the EMD method require many iterations and numerous calculations. However, EWT requires less calculations to obtain the IMFs from fault signals based on the wavelet method.
Therefore, EWT is more suitable for analyzing short-circuit fault signals with non-stationary characteristics.
The features used directly affect the classification of short-circuit faults. The features of short-circuit fault signals can be extracted from the time-frequency matrix of short-circuit faults. In the present study, various entropies such as Shannon entropy [
16], Shannon energy entropy (EE) [
17], Shannon energy spectrum entropy [
18], Shannon time entropy (TE) [
5], and Shannon singular entropy (SE) [
19] have been used to characterize the time-frequency characteristics of short-circuit faults. When short-circuit fault signals are described by entropy, it is difficult to satisfy the requirement of different sampling rates by a uniform standard of selecting sliding window parameters. Moreover, the entropy characteristics in the time domain are extracted along the time axis. The differences between short-circuit faults in the frequency domain are mainly reflected through the entropy value with limited expressive ability.
On the basis of feature extraction, the types of short-circuit faults can be recognized by classifiers. The methods used for constructing the classifier of short-circuit faults include neural networks (NN) [
20], extreme learning machine (ELM) [
21], support vector machine (SVM) [
22], and so on. NNs have good robustness and adaptability resulting in it being widely used in the field of short-circuit fault classification [
4,
5]. However, it is difficult to determine the optimal structure of the NNs-based classifier and a large number of parameters need to be optimized. At the same time, the training for the NN processing requires a large number of historical samples which limit the applications of NNs. As the weights and thresholds are randomly generated in the process of network training, ELM has a faster learning speed. However, the diagnosis results are easily affected and fluctuated by both the hidden layer nodes and random parameters of ELM [
23,
24]. SVM has a good classification ability and robustness while the optimal factors of SVM can be easily chosen by the cross-validation method. In addition, it is easy to optimize the SVM with a small number of characters. The optimal classifier can be constructed by the cross-validation method to reduce the classification error due to the unreasonable parameters of SVM.
In order to improve the recognition accuracy of short-circuit fault signals, this paper presents a method for the detection and diagnosis of short-circuit faults based on EWT and LE. First, the fault signal is processed by the EWT method, with the results obtained by EWT being called IMFs. Subsequently, fault detection is realized by the modulus maxima point of the IMF2. Following this, the IMF0 of fault signals in the first period after the occurrence of the fault is decomposed into several time-frequency blocks of equal size. The local energy (LE) features are obtained by calculating the energy of each block to create the energy distribution of the fundamental frequency signals in the time domain. Finally, the SVM classifier is constructed according to the LE feature vectors to classify short-circuit faults. Comparison experiments verify the validity and creativeness of this new method.
2. Proposed Classification Framework for Short-Circuit Faults
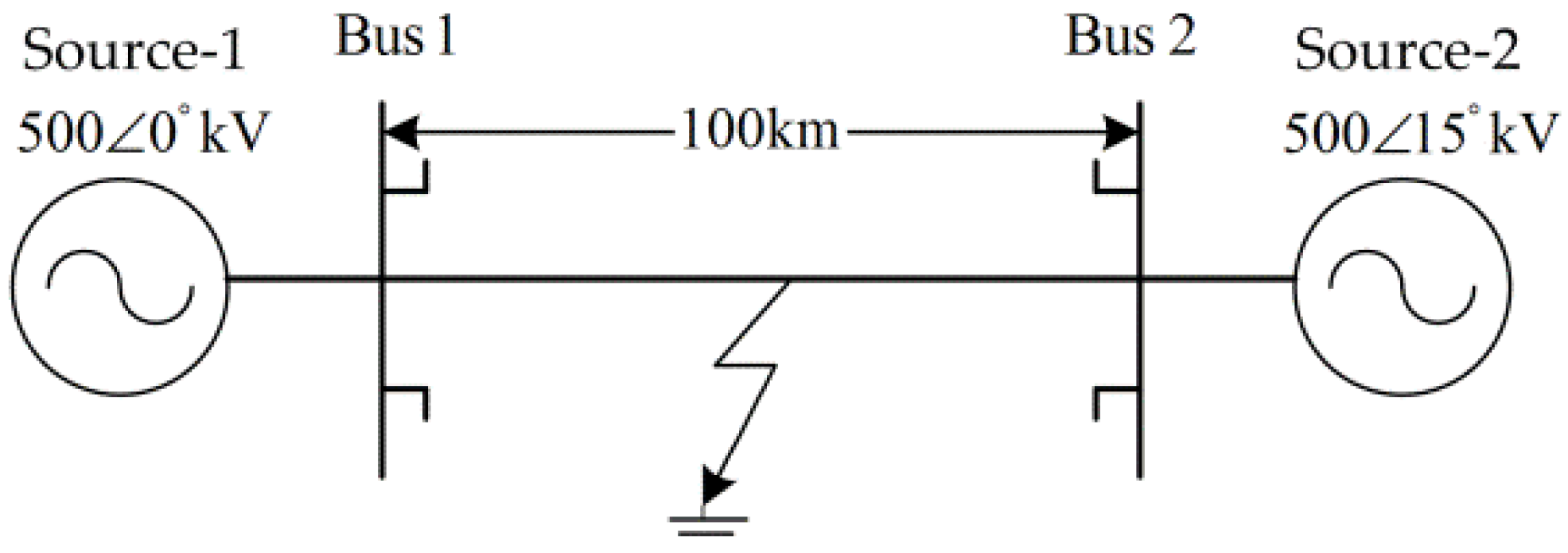
The real measured fault signals do not have the accurate fault time. In order to verify the accuracy of detection using the new approach and to obtain training samples for fault classification, the fault signals for analysis are first simulated with certain parameters. As shown in
Figure 1, a 500 kV transmission system with double-terminal power supply and a system frequency of 50 Hz is adopted in this model, while PSCAD software is used to carry out the simulated experiments.
The transmission line parameters of the simulated system were obtained from a previous reference [
5]. Positive, negative, and zero sequence parameters are shown in
Table 1.
The ‘Bus 1’ is identified in
Figure 1. Ten types of short-circuit faults are simulated, including single-phase grounding faults (AG, BG, and CG), two-phase grounding fault (ABG, BCG, and CAG), interphase short-circuit fault (AB, BC, and CA), and three-phase faults (ABC and ABCG) are simulated. The end of ‘Bus 1’ is found at the signal acquisition end and reference point for the fault distance.
The parameters of the short-circuit fault signals generated by the simulated system are set as follows:
The inception angle of voltage signals is set to a random integer value in the range of 0–360°;
The fault transition resistance is arranged as a random integer value in the range of 0–200 Ω;
The fault distance is set to a random integer value in the range of 10–90 km.
The ranges of the transition resistance and fault distance were both chosen according to the same paper [
5]. The function of randi in MATLAB is used to generate the random value of three columns of random integers (100 integers for each column). Then the corresponding ranges for each column are 0–360, 0–200, and 10–90 and 100 kinds of fault condition are obtained for each fault type.
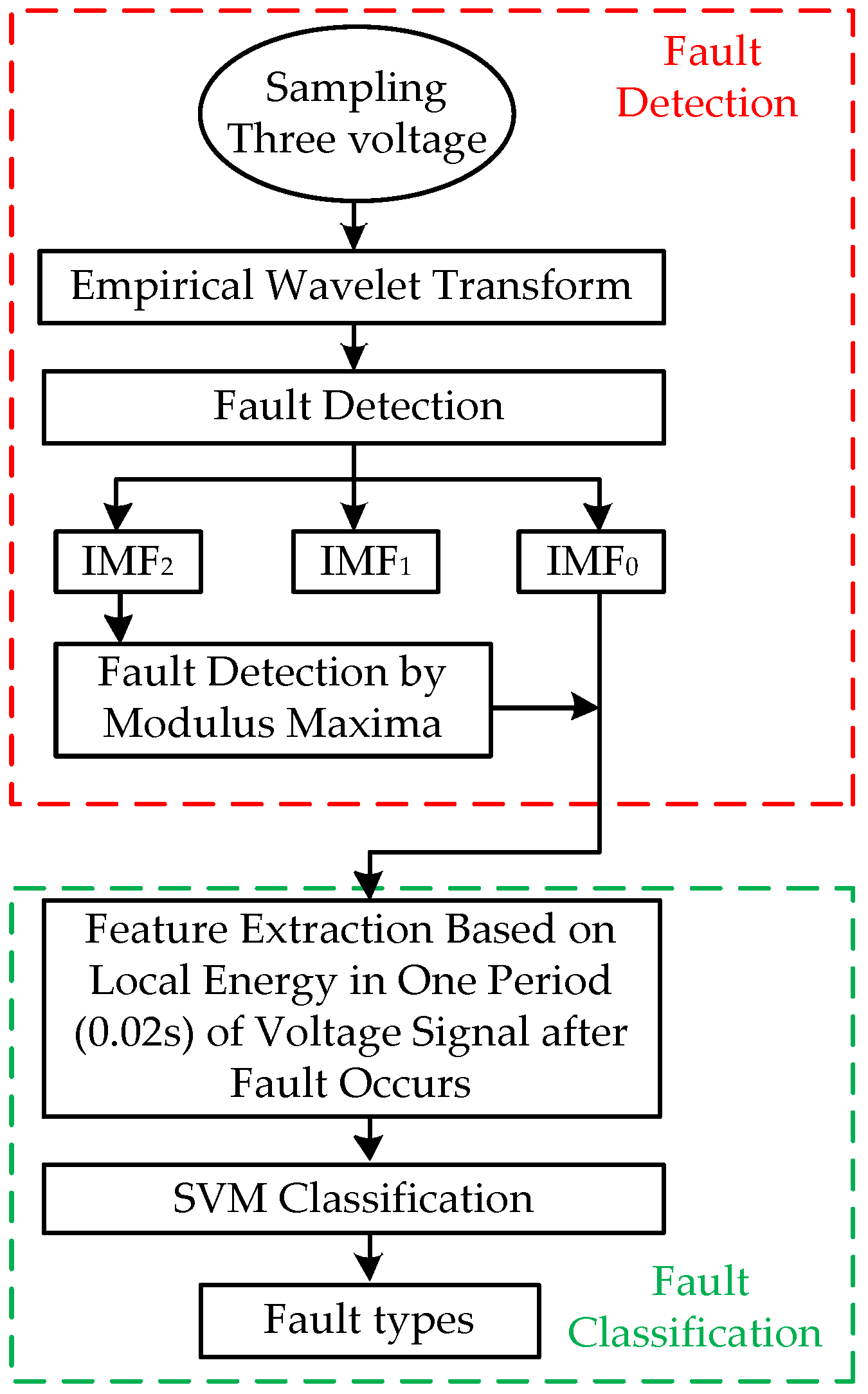
The process of detecting and diagnosing short-circuit faults proposed in this paper is shown in
Figure 2. This mainly has two parts: the fault detection module and fault type identification module.
In the detection module, the short-circuit fault signals are decomposed by the EWT method. Following this, the modulus maxima value is used to determine the time that the fault occurred.
In the recognition module, the method calculates LE from IMF0 in the period after the occurrence of the fault. After this, the feature vector is used as an input for the classifier based on SVM to obtain the recognition result.
3. Processing of Short-Circuit Fault Signals by EWT and Detection of Faults
3.1. EWT
It is difficult to use the traditional EMD method to prove the orthogonality of the intrinsic mode function (IMF) components. There are some problems of mode mixing and pseudo-mode in the decomposition results. On the basis of adaptive orthogonal wavelet filter banks, the EWT method calculates the approximate and detail coefficients of the signals. Therefore, EWT obtains more accurate IMF components than EMD, making it more suitable for the analysis of short-circuit fault signals.
The number of IMFs from EWT can be determined in a specified or adaptive way. In this paper, an adaptive frequency domain segmentation method is employed with the specified number of IMFs. Since the default initial boundary of the divided spectrum used contains the default parameters of two values, three IMFs are obtained.
In this paper, the adaptive method is used to segment the original short-circuit fault signals
in the frequency domain. Three IMFs (
) were constructed to analyze the components of the short-circuit fault signals in different frequency domains.
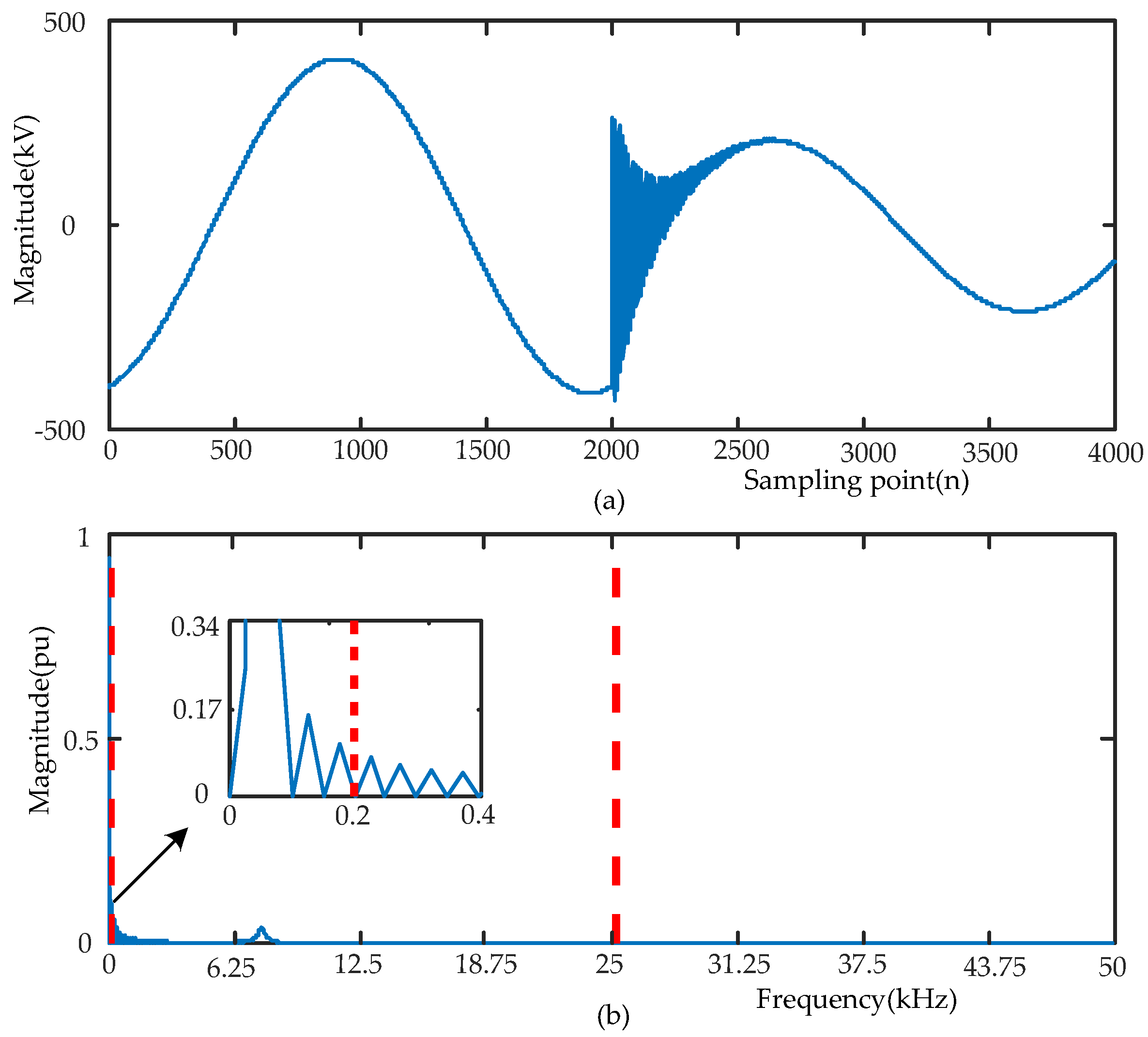
The single-phase voltage signal (A-phase of CA fault) of short-circuit faults was used as an example to show the process of EWT analysis. The signal sampling frequency of short-circuit fault signals is 100 kHz. The sample of voltage signal contains 4000 sample points.
Firstly, the voltage signal is transformed by FFT to obtain the spectrum ([0, 50] kHz). Through an adaptive segmentation step of EWT, the segmentation boundary is obtained as follows: Ω
1 = 0.2 kHz, and Ω
2 = 25.275 kHz (
kHz, and
kHz). Since the frequency domain interval corresponding to each IMF can be expressed as
, the segmentation intervals are determined by the segmentation boundary as
[0, 0.2] kHz,
[0.2, 25.275] kHz and
[25.275, 50] kHz. The original signal and spectrum segmentation results are presented in
Figure 3.
Secondly, a low-pass filter and two band-pass filters are defined based on the above segmentation boundary. The Fourier transformation expressions of the scaling function
and the empirical wavelet function
are respectively given as
where
is a parameter that ensures no overlap between adjacent intervals [
15]; and
is an arbitrary function, which is defined as
Following this, an approximate coefficient can be obtained by computing the inner products of the empirical scaling function
and signals
as shown in Equation (5). The detailed coefficients can be calculated according to Equation (6).
where
,
and
denote the fast Fourier transformation, its inverse transformation, and complex conjugate of the function
respectively.
Finally, the IMFs of EWT are obtained as
where,
is the symbol of convolution.
This shows that EWT can accurately extract the intrinsic mode information of different frequency components short-circuit fault signals. Since orthogonal filter banks are generated according to the spectral information of the original fault signals, this approach is more adapted for processing short-circuit fault signals without the influence of pseudo-modes.
3.2. Processing of Short-Circuit Fault Signals Processing Based on EWT
In order to verify the advancement of EWT, four methods including EWT, WT, CEEMDAN, and improved CEEMDAN are used to process the short-circuit fault signals. The parameters of the four methods are set as follows. EWT is set in
Section 3.1, while the number of decomposed layers of WT is set to two. Thus, this results in three components for achieving a comparison with EWT using the same number of components. CEEMDAN and improved CEEMDAN adopt default parameter. By comparing the effect and computing time of different signal processing methods, the effectiveness and advancement of EWT are verified.
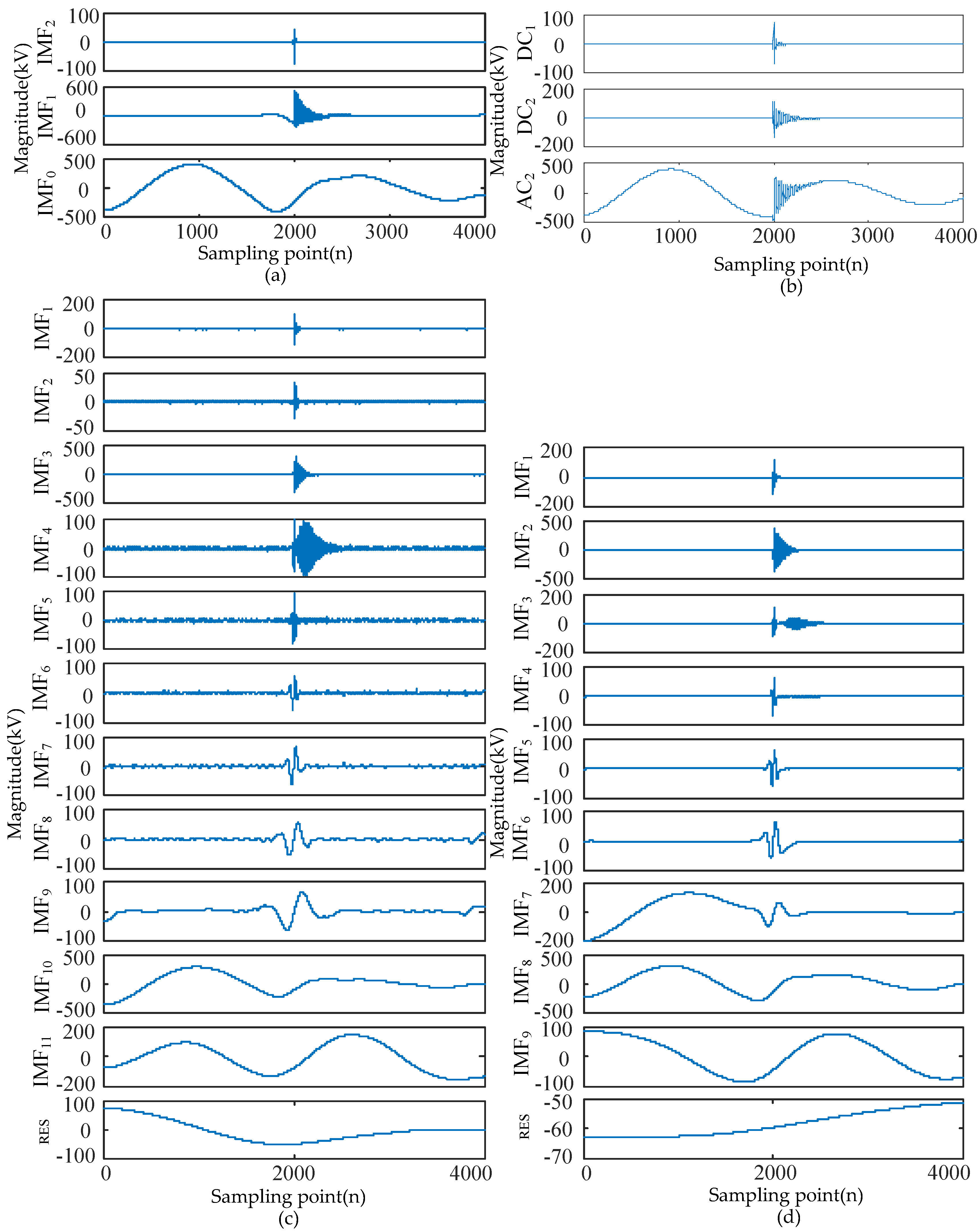
Figure 4 shows the decomposition results of short-circuit fault signals by different methods.
As shown in
Figure 4, modes extracted by EWT, WT, CEEMDAN, and improved CEEMDAN approaches are described respectively. EWT decomposes the original fault signal into three IMFs as shown in
Figure 4a. Approximate coefficient (AC
2) and detailed coefficients (DC
1 and DC
2) are obtained by WT. However, more IMFs are extracted by CEEMDAN and the modes contain residual noise. These defects cause difficulties in feature extraction. The improved CEEMDAN method effectively suppresses the residual noise in modes and improves the performance of CEEMDAN method, although it still results in a larger number of IMFs compared to EWT.
The time required for the four methods to decompose the same fault signal is 0.042 s, 0.038 s, 654.662 s, and 518.956 s. Compared to CEEMDAN and improved CEEMDAN method, EWT has a higher computational efficiency. Moreover, the computation efficiency of EWT is slightly less than WT.
IMF
0 are used to extract features in
Section 4.1 and thus we compared these components. As seen in
Figure 4, the IMF
0 extracted by EWT does not contain other components that form the foundation for feature extraction. The frequency domain is segmented in a restricted manner after the number of decomposition levels in WT is fixed. However, the IMF
0 AS
2 contains an oscillating component which is not conducive for feature extraction. In comparison, the IMF
10 extracted by CEEMDAN and the IMF
8 extracted by improved CEEMDAN does not contain other components, although both methods require more time to process the fault signal. Therefore, EWT was chosen as the signal processing method.
3.3. Detection of Short-Circuit Faults Based on EWT
After obtaining the results of short-circuit fault signals processed by EWT, the time-frequency matrix composed by IMFs can be used for feature extraction. If the features are extracted from the whole time-frequency matrix, there will be no obvious fault characteristics with a high dimension of feature vectors. Moreover, it will increase the complexity of the classifier and reduce the classification accuracy. In the present research, the range of feature extraction is reduced to one period with the most transient information after the occurrence of the fault [
25]. Thus, the feature dimension of short-circuit fault signals can be reduced effectively.
In order to obtain the singularity of fault signal simply and clearly, the modulus maxima (MM) of wavelet transform is introduced. The MM is only valid if it meets the following condition [
26]:
a neighborhood
exists; for every
.
The time that a fault occurs often corresponds to the singular point of the voltage signal. The traditional WT has good spatial localization properties, which can accurately detect the singularity of fault signals. Therefore, the time that a fault occurs can be pinpointed by the modulus maxima point in high frequency mode components [
27]. A previous study [
15] pointed out that EWT is based on the wavelet theory framework. Furthermore, the largest difference between EWT and WT is that EWT is based on the original signal for constructing orthogonal wavelet which does not require the mother wavelet to be chosen. Thus, the fault time can be located through the modulus maxima point in the high-frequency mode component based on EWT. This lays the foundation for extracting features of short-circuit fault signals based on the first cycle after the occurrence of the failure.
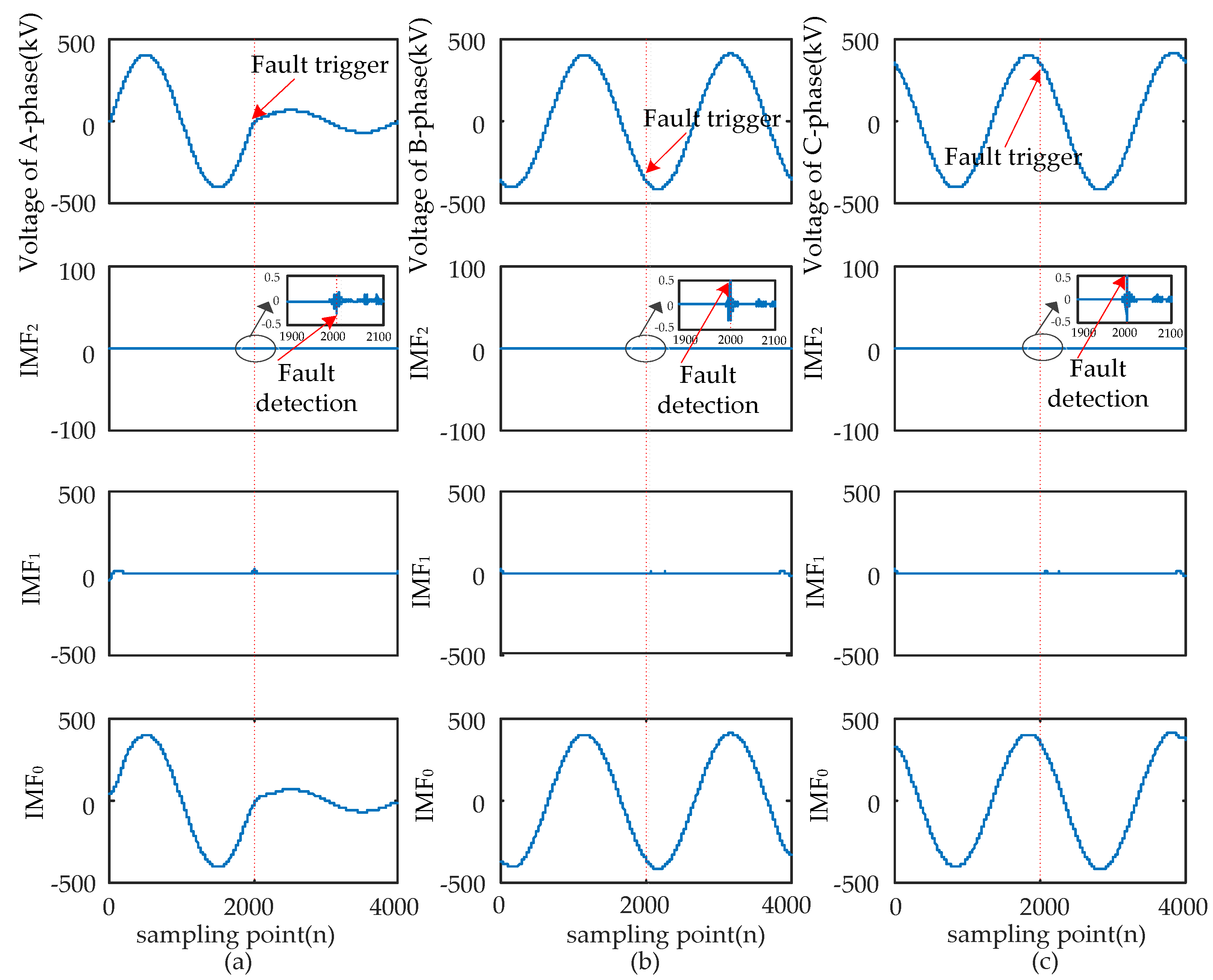
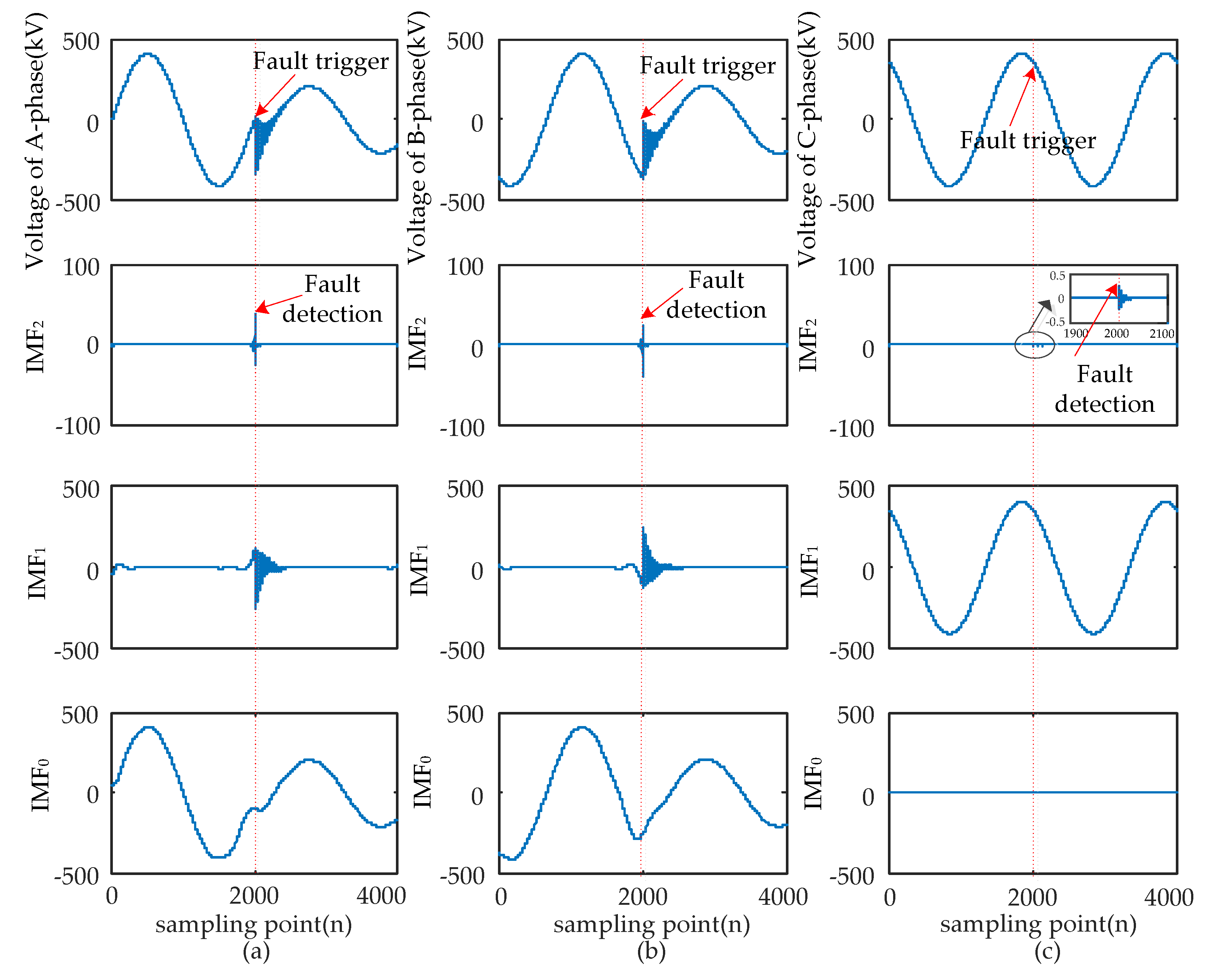
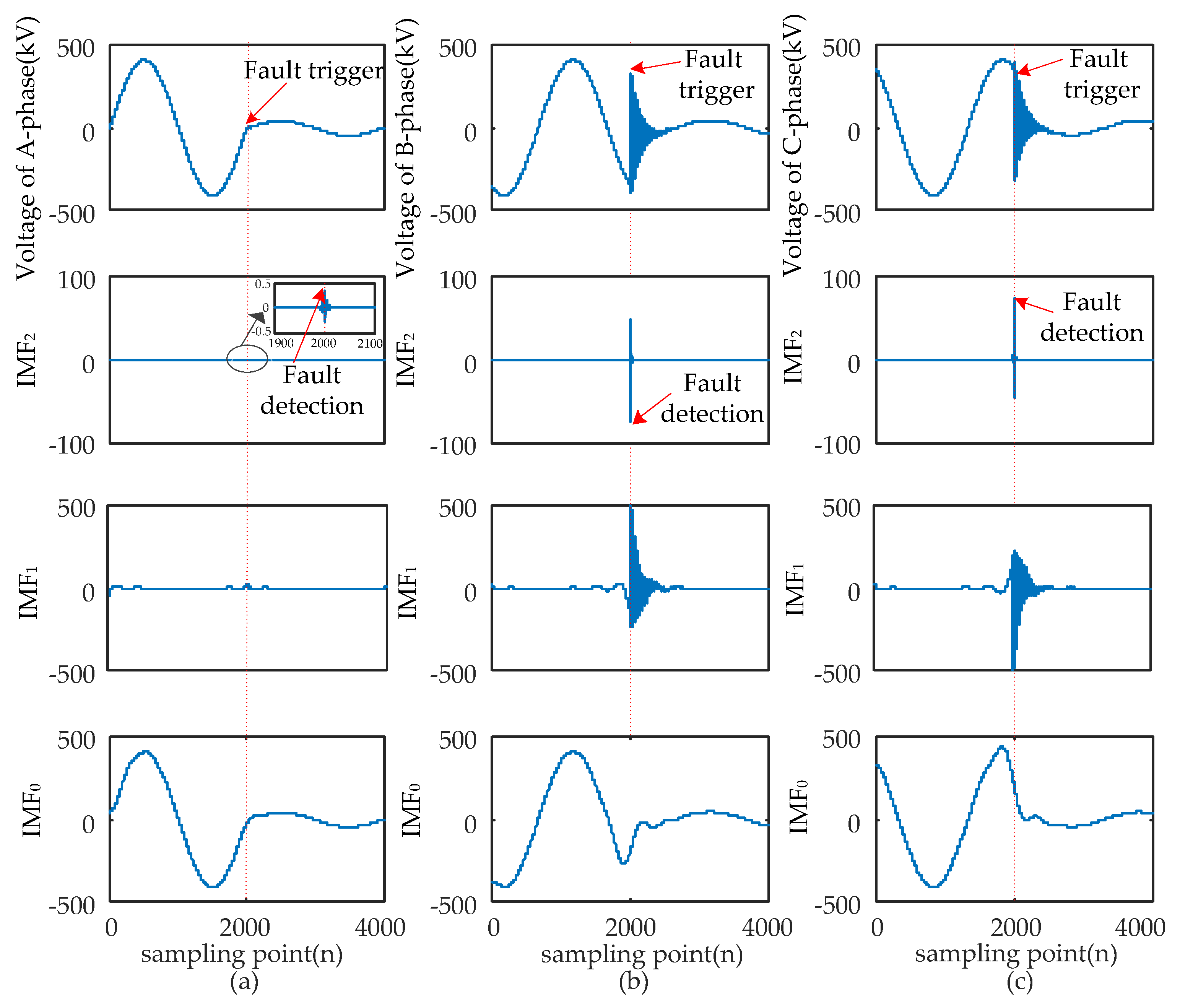
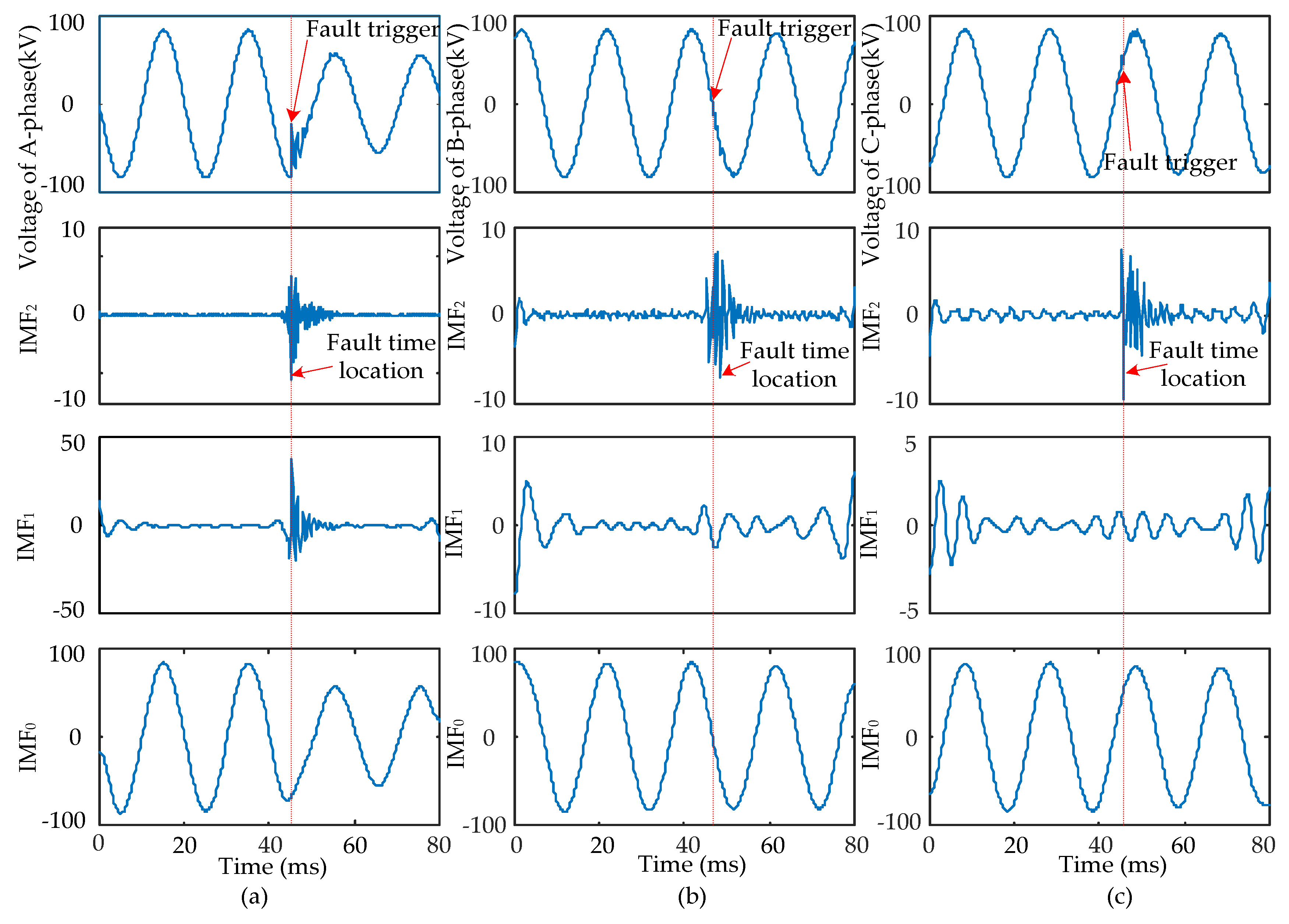
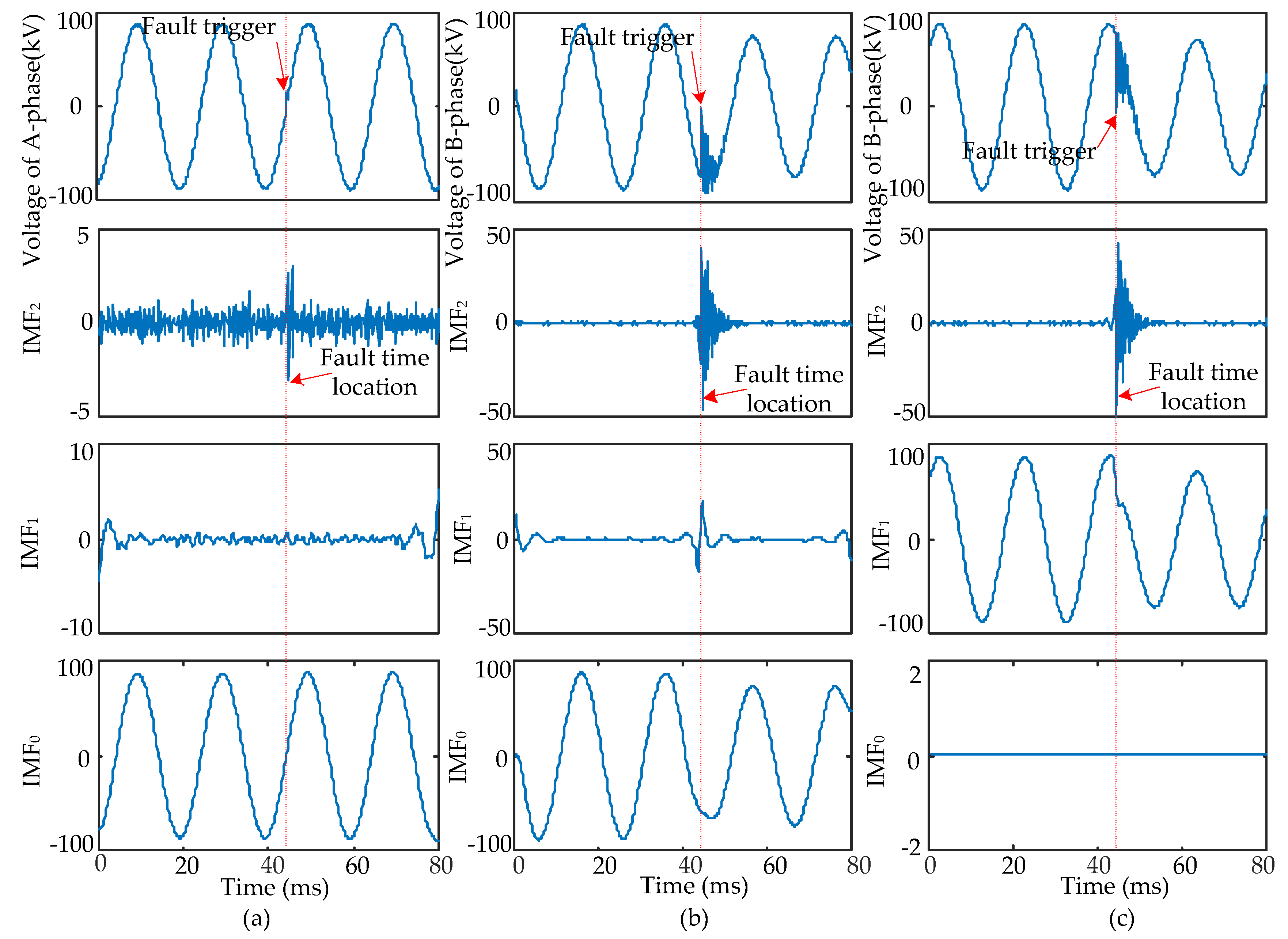
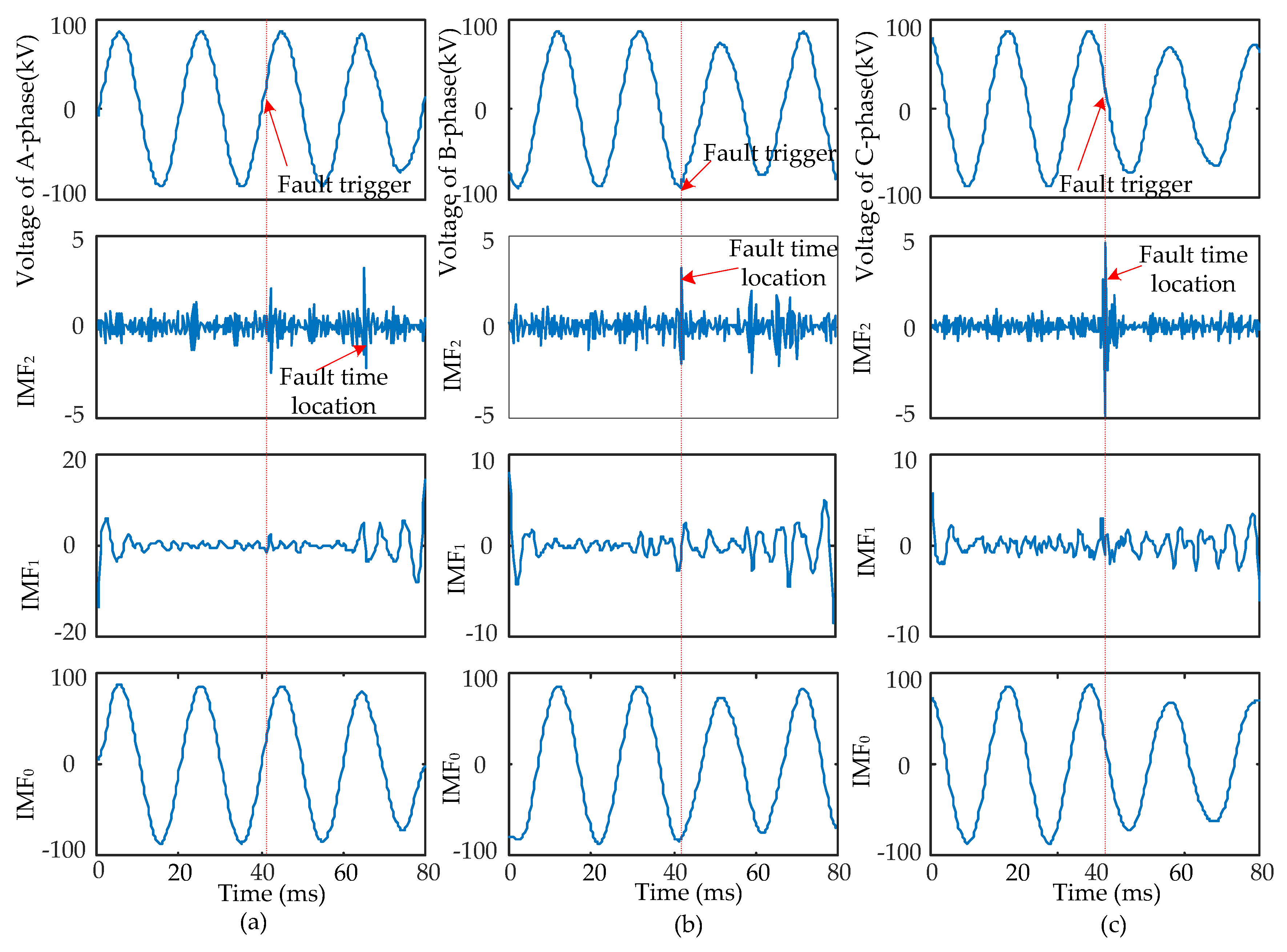
When short-circuit faults occur, the voltage signals of the fault and non-fault phases change together. Therefore, the time that a fault occurred should be determined synthetically by the modulus maxima of IMF
2 from three-phase signals. Four typical types of short-circuits include the single-phase grounding fault (AG), two-phase grounding fault (ABG), interphase short-circuit fault (AB), and three-phase fault (ABC and ABCG). These were used to verify the ability of EWT to pinpoint time and location. The transform results are shown in
Figure 5,
Figure 6,
Figure 7 and
Figure 8 and uniform scale is adopted.
As shown in
Figure 5,
Figure 6,
Figure 7 and
Figure 8, the phase voltage signal of four types of faults are decomposed into three IMFs (IMF
2, IMF
1, and IMF
0) by EWT. Compared with IMF
0 and IMF
1, the modulus maxima of IMF
2 is more obvious. Therefore, the fault time can be determined by the modulus maxima point of IMF
2. At the same time, there are modulus maxima in the three-phase signal when short-circuit faults occur. Therefore, the occurrence time of short-circuit faults can be determined by the modulus maxima of IMF
2 from the three-phase voltage signals processed by EWT.
The detailed process of the new fault detection method based on the modulus maxima of IMF2 decomposed by EWT is described as follows:
If the result of fault detection from different phase signals is consistent, this result is considered the fault detection result (FDR);
If two values of the three detection results are the same, the same value is decided as the FDR;
If the three-phase detection results are different, the minimum detection value is taken as the FDR.
The detection results of the three methods for different types of short-circuit faults are shown in
Table 2.
In order to verify the effectiveness and advancement of the new method, the location results of the new method are compared with other methods based on Shannon energy entropy (EE) [
5] and Shannon singular entropy (SE) [
17].
As shown in
Table 2, the error of fault detection with the ‘EWT + MM’ approach for the AG type is 2 sampling points (20 us), while the error of ABG, AB, and ABC is 0. The detection error of the ‘EWT + SE’ and ‘EWT + EE’ method is larger than that of the ‘EWT + MM’ method.
4. Feature Extraction Based on Local Energy
4.1. Local Energy
Existing research has shown that short-circuit fault signals in the first period change dramatically when a fault occurs [
25,
27]. Moreover, the signal in this period contains the most abundant fault features. In this paper, it is found that the IMF
0 based on EWT can reflect the changing trends of fault signals.
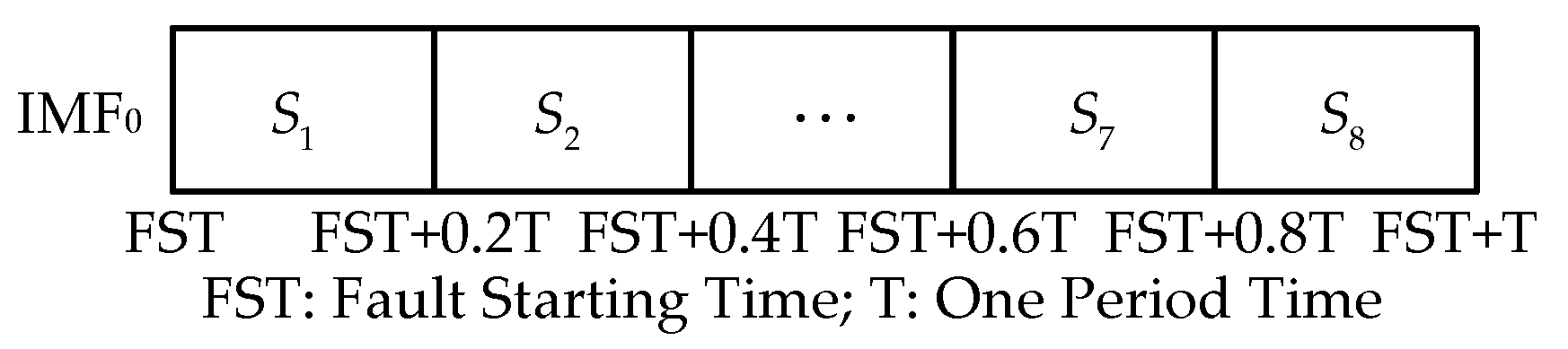
After obtaining the time at which a short-circuit fault occurs, the first period of the time-frequency matrix after the occurrence of a fault is used to extract the features for constructing the feature vector of the classifier. In order to present the change in the IMF0 over time, the new method uses local energy (LE) to construct feature vectors. The time-frequency vector obtained by EWT is divided into time-frequency blocks of equal size. Following this, the LE is obtained from each time-frequency block. Finally, the feature vector of short-circuit fault signals is composed by combining the LE of all time-frequency blocks.
In this paper, the sampling rate of short-circuit fault signals is 100 kHz. In the feature extraction step of the new approach, the IMF
0 obtained by EWT constitutes the vector
. The vector
is the time-frequency vector having a dimension of
is divided into eight equal-sized time-frequency blocks along the time axis, so that every block has 400 sampling points (0.2 T) as shown in
Figure 9.
The energy of the time-frequency block
is described as
respectively. These values are calculated as
where
is the sampling point of vector
.
The features of three-phase voltage signals are calculated according to Equation (9) to obtain the feature vector . The feature vector reflects the energy variation characteristics of the IMF0 of three-phase signals from short-circuit faults in the time domain.
4.2. Feature Extraction Based on LE
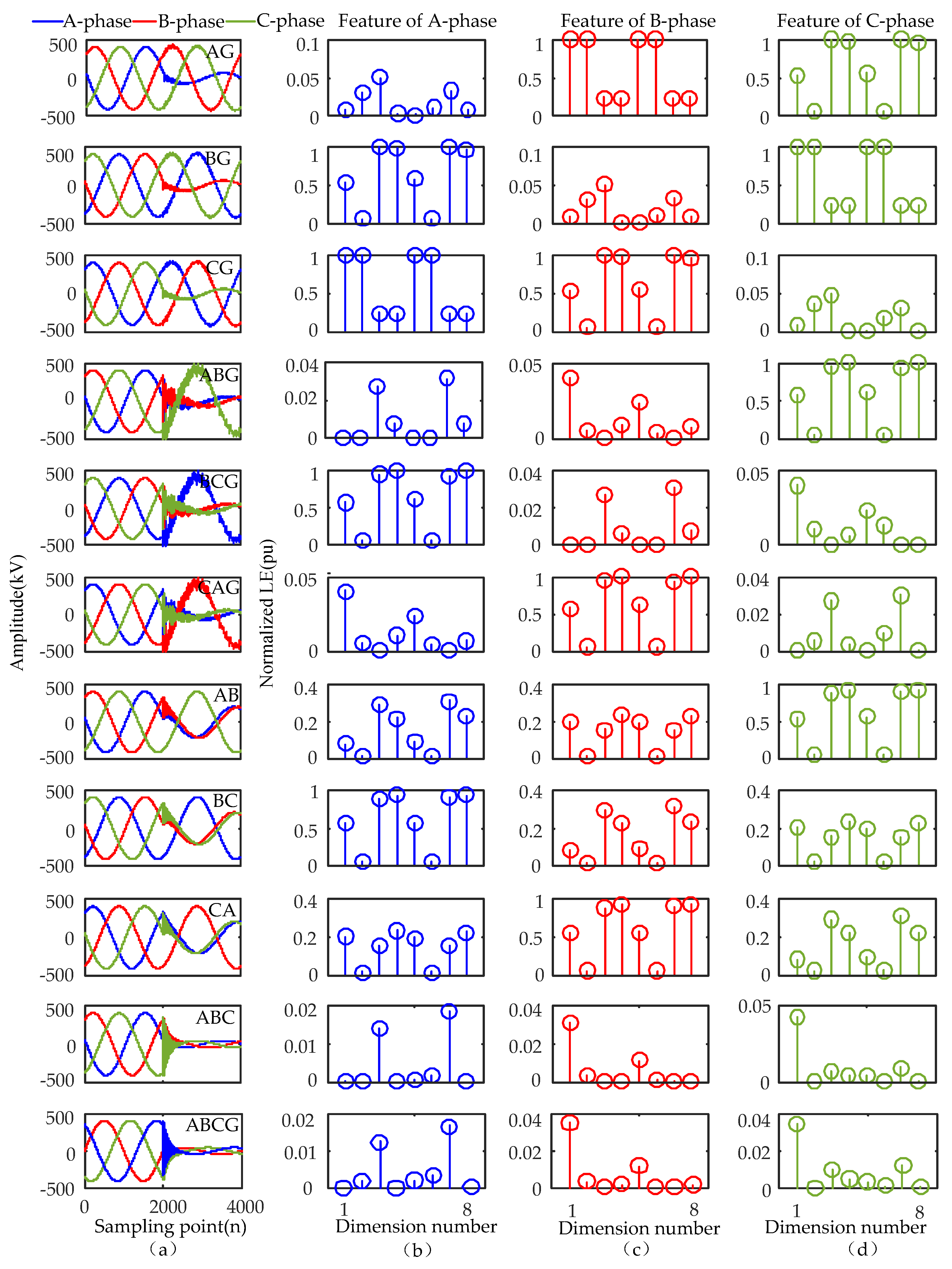
Ten types of short-circuit fault signals in
Figure 10a are listed to illustrate the feature extraction process. Their parameters are set as follows: fault distance is 30 km, the fault initial angle is 0°, and the transition resistance is 100 Ω. The results of feature extraction are shown in
Figure 10b–d.
The black, red, and green discrete points correspond to the LE features of the IMF0 of A, B, and C-phase voltage signals, respectively.
As shown in
Figure 10, the feature amplitude of the IMF
0 of the non-fault phases (B and C) is significantly larger than that of the fault phase A once an AG fault occurs. These characteristics meet the trend characteristics that the fault phase voltage amplitude decreases and non-fault phase amplitude increases when a single-phase ground fault occurs. The feature amplitude relationship between the non-fault phase and fault phase has the same conclusion as AG when BG and CG faults occur.
When the ABG fault happens, the feature values of the fault phases (A and B) are small, while the feature values of the non-fault phase C are large. These characteristics meet the trend characteristics that the fault phase voltage amplitude decreases and the non-fault phase amplitude increases when a two-phase ground fault occurs. The feature amplitude relationship between the non-fault phase and fault phase have the same conclusion as ABG when the BCG and CAG fault occur.
When the AB fault happens, the feature values of the fault phases (A and B) are small, while the characteristic values of the fault phase C are large. These characteristics meet the trend characteristics that the fault phase voltage amplitude decreases and the non-fault phase amplitude increases when an interphase short-circuit fault occurs. The feature amplitude relationship between the non-fault phase and fault phase has the same conclusion as AB when the BC and CA faults occur.
When the ABC fault happens, the feature values of the three phases are small, which is consistent with previous findings that the amplitude of the three-phase voltages decrease. The feature values and trend characteristics of three-phase voltage signals of ABC and ABCG are relatively close under the same fault condition.
The values of the input classifier are arranged according to the feature values of the A, B, and C phases.
As shown in the above analysis, the energy distribution characteristics of different types of short-circuit fault can be clearly reflected by the LE energy features in three-phase signals. There are obvious differences in the feature values of 10 types of faults. All the above characteristics provide a significant basis for the identification of fault type. The classification ability with LE features in the new method will be further validated through statistical experiments in
Section 6.
In order to verify the effectiveness of the feature extraction method, the EE [
5] and SE [
17] feature extraction methods were also employed for comparison with the proposed method. Experiments show that every short-circuit fault signal obtains three IMF components based on EWT. The time-frequency characterization of signals using EE and SE based on the whole time-frequency domain is limited. In comparison, the LE feature characteristics reflect the energy change in the IMF
0 of the signal in the time domain, while the time domain characteristic of short-circuit fault signals is more detailed. A detailed simulation is shown in
Section 6.3.
5. Design of Short-Circuit Fault Classifier Based on SVM
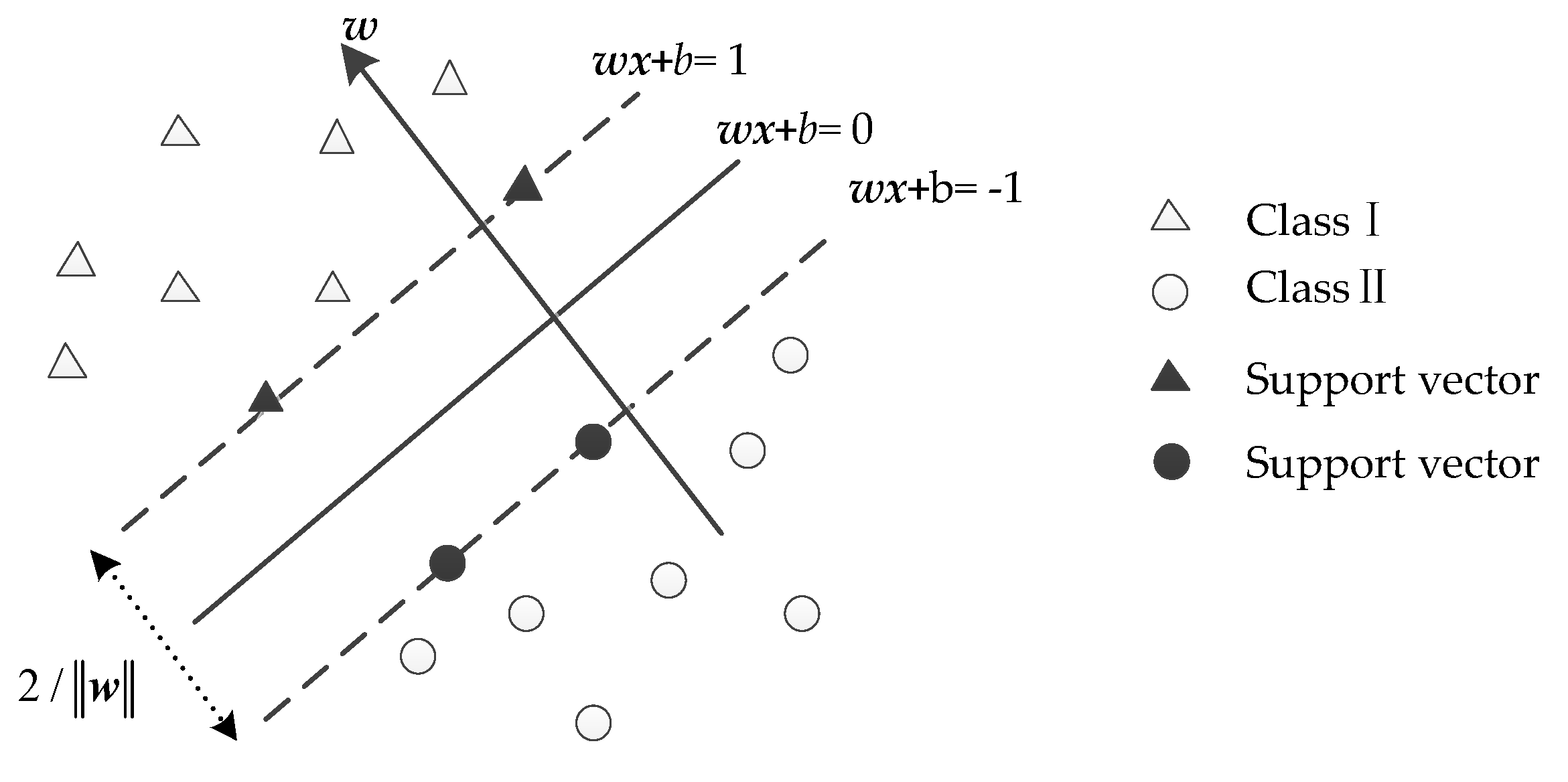
In the existing algorithms used for short-circuit fault classifiers, SVM performs accurately in classification and has robustness with less training samples. The goal of SVM is to classify the data points belonging to different classes by constructing the optimal hyperplane [
28].
Figure 11 presents the classification principles of SVM.
In order to better understand the basic principles of SVM, the two-class linearly separable data set
is assumed as
where
is a
U-dimensional input vector;
is the corresponding class of
; and
N is the number of samples. The data points in set
E can be divided into two types by the hyperplane, which is defined as
where
w is the weight vector; and
b is the scalar. Two types of sample vectors from the hyperplane are called support vectors. The distance between the two-class support vectors and separating hyperplane is called the separating margin which is given as
In order to get the maximized
m, we need to minimize the
. The goal of SVM is to determine the value of
w and
b, so that the separating margin is the largest. The optimal separating margin can be obtained by solving the quadratic optimization problem as
In order to solve the above problems, the Lagrange multiplier α is introduced, and the optimization objective function is obtained by
After solving the above optimization problems, we can obtain the optimal solution
, before calculating the best solutions for
and
. Finally, the optimal classification function is
In fact, the classification problem of short-circuit faults is a non-linear separable problem. We can map the sample data from the low-dimensional space to a high-dimensional space by the kernel function
. By replacing
with
, the optimal classification function is obtained as
As the feature space corresponding to the Gauss kernel function is infinitely dimensional, the finite sample is linearly separable in the space. In this paper, Gauss kernel function is used as
where
is the parameter of the Gauss kernel function.
From the above analysis, we can know that SVM is limited in only being able to deal with the binary classification. SVM needs to be further improved in order to solve the multi-classification problem.
In this paper, the LIBSVM package based on “one-against-one” structure [
29] is used to solve the problem of multi-classification problem of short-circuit faults.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}