An Improved Evidential-IOWA Sensor Data Fusion Approach in Fault Diagnosis


Abstract
:1. Introduction
2. Preliminaries
2.1. Dempster–Shafer Evidence Theory
2.2. Jousselme Distance
2.3. Belief Entropy
2.4. IOWA Operator
2.5. Maximum Entropy Method
3. The Evidential IOWA-Based Fault Diagnosis Method
3.1. The Evidential-IOWA Parameter
3.1.1. Definition of in IOWA
3.1.2. Definition of Based on the Distance of Evidence
3.1.3. Definition of Based on the Belief Entropy
3.1.4. The Weight Vector of IOWA
- Step 1
- Step 2
- Step 3
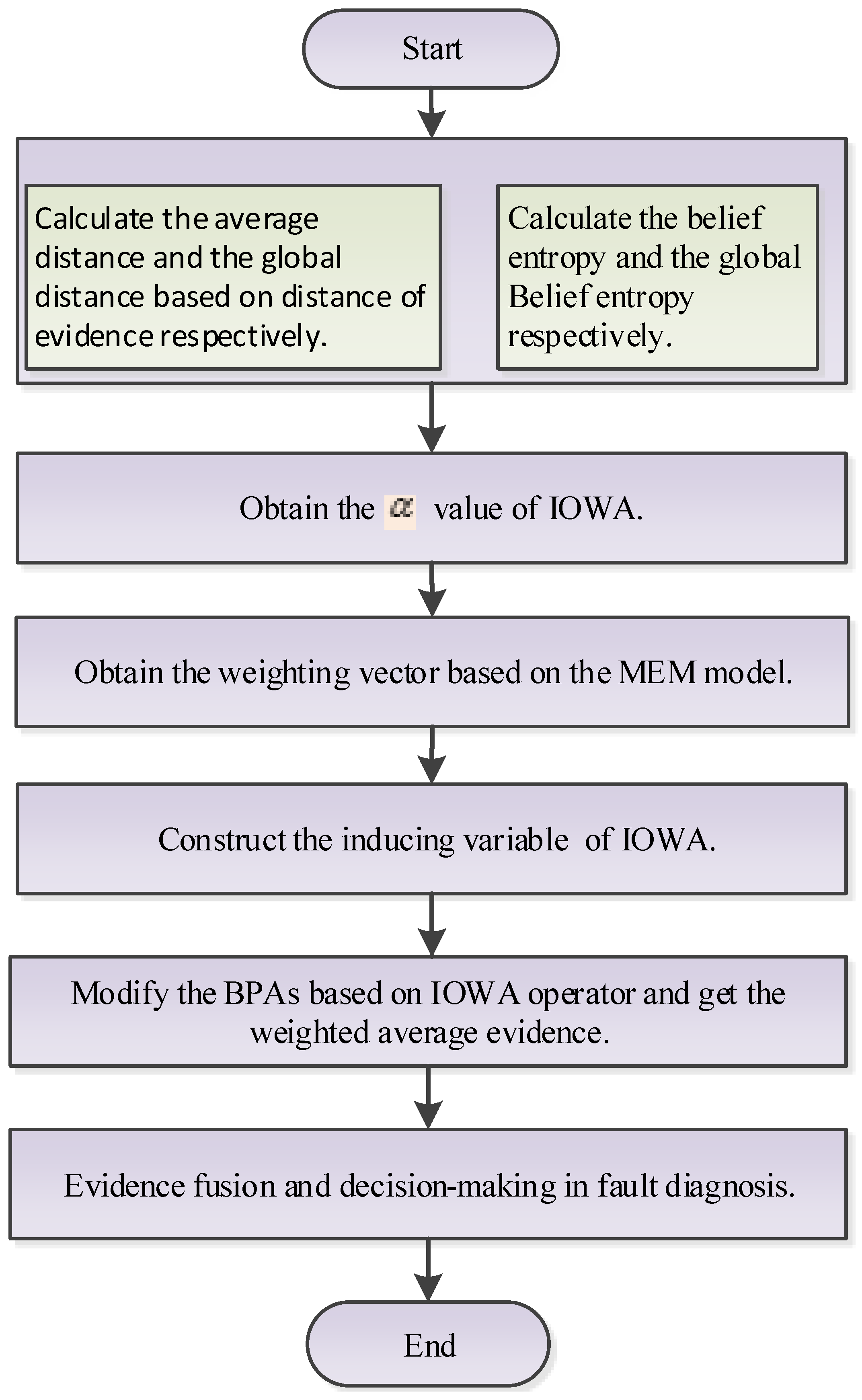
3.2. Multi-Evidential Fusion Model
- Step 1
- Construct the inducing variable :where is the average distance of evidence obtained by Equation (13).
- Step 2
- Obtain the OWA pairs , where is the argument variable, namely, it is the BPAs of the evidence .
- Step 3
- According to Equation (8), the weighted average evidence can be calculated.
- Step 4
- Combine the new evidence with Dempster’s combination rule by () times.
4. Application
4.1. Experiment with Artificial Data
4.2. A Case Study
4.3. Discussion
- FD without fault to be sure that the proposed solution doesn’t give false alarm,
- FD with a misalignment fault to highlight that we detect this fault well,
- FD with pedestal fault.
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Patecornell, M. Organizational aspects of engineering system safety: The case of offshore platforms. Science 1990, 250, 1210–1217. [Google Scholar] [CrossRef] [PubMed]
- Oosterom, M.; Babuska, R.; Verbruggen, H.B. Soft computing applications in aircraft sensor management and flight control law reconfiguration. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2002, 32, 125–139. [Google Scholar] [CrossRef]
- Picazo-Rodenas, M.J.; Royo, R.; Antonino-Daviu, J.; Roger-Folch, J. Use of the infrared data for heating curve computation in induction motors: Application to fault diagnosis. Eng. Fail. Anal. 2013, 35, 178–192. [Google Scholar] [CrossRef]
- Zhang, B.; Tan, A.C.C.; Lin, J.H. Gearbox fault diagnosis of high-speed railway train. Eng. Fail. Anal. 2016, 66, 407–420. [Google Scholar] [CrossRef]
- Du, Y.; Lu, X.; Su, X.; Hu, Y.; Deng, Y. New failure mode and effects analysis: An evidential downscaling method. Qual. Reliab. Eng. Int. 2016, 32, 737–746. [Google Scholar] [CrossRef]
- Chen, C.; Brown, D.; Sconyers, C.; Zhang, B.; Vachtsevanos, G.; Orchard, M.E. An integrated architecture for fault diagnosis and failure prognosis of complex engineering systems. Expert Syst. Appl. 2012, 39, 9031–9040. [Google Scholar] [CrossRef]
- Ferreira de Loza, A.; Cieslak, J.; Henry, D.; Zolghadri, A.; Fridman, L.M. Output tracking of systems subjected to perturbations and a class of actuator faults based on HOSM observation and identification. Automatica 2015, 59, 200–205. [Google Scholar] [CrossRef]
- Jiang, W.; Xie, C.; Zhuang, M.; Shou, Y.; Tang, Y. Sensor Data Fusion with Z-Numbers and Its Application in Fault Diagnosis. Sensors 2016, 16, 1509. [Google Scholar] [CrossRef] [PubMed]
- Su, X.; Deng, Y.; Mahadevan, S.; Bao, Q. An improved method for risk evaluation in failure modes and effects analysis of aircraft engine rotor blades. Eng. Fail. Anal. 2012, 26, 164–174. [Google Scholar] [CrossRef]
- Oukhellou, L.; Debiolles, A.; Denoeux, T.; Aknin, P. Fault diagnosis in railway track circuits using Dempster–Shafer classifier fusion. Eng. Appl. Artif. Intell. 2010, 23, 117–128. [Google Scholar] [CrossRef]
- Sun, S.; Lin, H.; Ma, J.; Li, X. Multi-sensor distributed fusion estimation with applications in networked systems: A review paper. Inf. Fusion 2017, 38, 122–134. [Google Scholar] [CrossRef]
- Pang, C.; Sun, S. Fusion Predictors for Multisensor Stochastic Uncertain Systems With Missing Measurements and Unknown Measurement Disturbances. IEEE Sens. J. 2015, 15, 4346–4354. [Google Scholar] [CrossRef]
- De Loza, A.F.; Cieslak, J.; Henry, D.; Davila, J.; Zolghadri, A. Sensor fault diagnosis using a non-homogeneous high-order sliding mode observer with application to a transport aircraft. IET Control Theory Appl. 2015, 9, 598–607. [Google Scholar] [CrossRef]
- Berdjag, D.; Cieslak, J.; Zolghadri, A. Fault diagnosis and monitoring of oscillatory failure case in aircraft inertial system. Control Eng. Pract. 2012, 20, 1410–1425. [Google Scholar] [CrossRef]
- Berdjag, D.; Zolghadri, A.; Cieslak, J.; Goupil, P. Fault detection and isolation for redundant aircraft sensors. Proceedings of 2010 Conference on Control and Fault-Tolerant Systems (SysTol), Nice, France, 6–8 October 2010; pp. 137–142. [Google Scholar]
- Cieslak, J.; Henry, D.; Zolghadri, A.; Goupil, P. Development of an active fault-tolerant flight control strategy. J. Guid. Control Dyn. 2008, 31, 135–147. [Google Scholar] [CrossRef]
- Efimov, D.; Cieslak, J.; Zolghadri, A.; Henry, D. Actuator fault detection in aircraft systems: Oscillatory failure case study. Annu. Rev. Control 2013, 37, 180–190. [Google Scholar] [CrossRef]
- Li, C.; Mahadevan, S.; Ling, Y.; Choze, S.; Wang, L. Dynamic Bayesian Network for Aircraft Wing Health Monitoring Digital Twin. AIAA J. 2017, 55, 930–941. [Google Scholar] [CrossRef]
- He, Y.; Hu, L.F.; Guan, X.; Deng, Y.; Han, D. New method for measuring the degree of conflict among general basic probability assignments. Sci. Chin.-Inf. Sci. 2012, 55, 312–321. [Google Scholar] [CrossRef]
- Tang, Y.; Zhou, D.; Xu, S.; He, Z. A Weighted Belief Entropy–Based Uncertainty Measure for Multi-Sensor Data Fusion. Sensors 2017, 17, 928. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.; Yang, F.B.; Ji, L.; Yuan, H.; Dong, A. A categorization method of infrared polarization and intensity image fusion algorithm based on the transfer ability of difference features. Infrared Phys. Technol. 2016, 79, 91–100. [Google Scholar] [CrossRef]
- Wang, Z.; Yang, F.; Peng, Z.; Chen, L.; Ji, L. Multi-sensor image enhanced fusion algorithm based on NSST and top-hat transformation. Optik Int. J. Light Electron Opt. 2015, 126, 4184–4190. [Google Scholar]
- Zadeh, L.A. Fuzzy sets. Inf. Control 1965, 8, 338–353. [Google Scholar] [CrossRef]
- Li, D.W.; Yang, F.; Wang, X.X. Crop region extraction of remote sensing images based on fuzzy ARTMAP and adaptive boost. J. Intell. Fuzzy Syst. 2015, 29, 2787–2794. [Google Scholar] [CrossRef]
- Dempster, A.P. Upper and Lower Probabilities Induced by a Multi-valued Mapping. Ann. Math. Stat. 1967, 38, 325–339. [Google Scholar] [CrossRef]
- Shafer, G. A Mathematical Theory of Evidence; Princeton University Press: Princeton, NJ, USA, 1976. [Google Scholar]
- Deng, Y. Generalized evidence theory. Appl. Intell. 2015, 43, 530–543. [Google Scholar] [CrossRef]
- Zhang, X.; Mahadevan, S. A Bio-Inspired Approach to Traffic Network Equilibrium Assignment Problem. IEEE Trans. Cybern. 2017, PP, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Guo, H.; Huang, H.; Liang, L. Fuzzy-robust design optimization with multi-quality characteristics. Eng. Optim. 2010, 42, 87–99. [Google Scholar] [CrossRef]
- Sun, S.; Tian, T.; Lin, H. State estimators for systems with random parameter matrices, stochastic nonlinearities, fading measurements and correlated noises. Inf. Sci. 2017, 397, 118–136. [Google Scholar] [CrossRef]
- Miao, B.; Dou, C.; Jin, X. Main Trend Extraction Based on Irregular Sampling Estimation and Its Application in Storage Volume of Internet Data Center. Comput. Intell. Neurosci. 2016, 2016, 9328062. [Google Scholar] [CrossRef] [PubMed]
- Jin, X.B.; Du, J.J.; Bao, J. Target Tracking of a Linear Time Invariant System Under Irregular Sampling. Int. J. Adv. Rob. Syst. 2012, 9, 219. [Google Scholar]
- Yuan, K.; Xiao, F.; Fei, L.; Kang, B.; Deng, Y. Modeling Sensor Reliability in Fault Diagnosis Based on Evidence Theory. Sensors 2016, 16, 113. [Google Scholar] [CrossRef] [PubMed]
- Liu, Z.G.; Pan, Q.; Dezert, J.; Mercier, G. Credal classification rule for uncertain data based on belief functions. Pattern Recognit. 2014, 47, 2532–2541. [Google Scholar] [CrossRef]
- Han, D.; Liu, W.; Dezert, J.; Yang, Y. A novel approach to pre-extracting support vectors based on the theory of belief functions. Knowl.-Based Syst. 2016, 110, 210–223. [Google Scholar] [CrossRef]
- Liu, Z.G.; Pan, Q.; Dezert, J.; Martin, A. Adaptive imputation of missing values for incomplete pattern classification. Pattern Recognit. 2016, 52, 85–95. [Google Scholar] [CrossRef] [Green Version]
- Zhou, K.; Martin, A.; Pan, Q.; Liu, Z. ECMdd: Evidential c-medoids clustering with multiple prototypes. Pattern Recognit. 2016, 60, 239–257. [Google Scholar] [CrossRef] [Green Version]
- Ghorabaee, M.K.; Zavadskas, E.K.; Amiri, M.; Antucheviciene, J. A New Method of Assessment Based on Fuzzy Ranking and Aggregated Weights (AFRAW) for MCDM Problems under Type-2 Fuzzy Environment. Econ. Comput. Econ. Cybern Stud. Res. 2016, 50, 39–68. [Google Scholar]
- Chin, K.S.; Fu, C.; Wang, Y. A method of determining attribute weights in evidential reasoning approach based on incompatibility among attributes. Computer. Ind. Eng. 2015, 87, 150–162. [Google Scholar] [CrossRef]
- Fu, C.; Wang, Y. An interval difference based evidential reasoning approach with unknown attribute weights and utilities of assessment grades. Computer. Ind. Eng. 2015, 81, 109–117. [Google Scholar] [CrossRef]
- Fu, C.; Yang, J.B.; Yang, S.L. A group evidential reasoning approach based on expert reliability. Eur. J. Oper. Res. 2015, 246, 886–893. [Google Scholar] [CrossRef]
- Zhang, X.; Mahadevan, S.; Deng, X. Reliability analysis with linguistic data: An evidential network approach. Reliab. Eng. Syst. Saf. 2017, 162, 111–121. [Google Scholar] [CrossRef]
- Su, X.; Mahadevan, S.; Xu, P.; Deng, Y. Dependence Assessment in Human Reliability Analysis Using Evidence Theory and AHP. Risk Anal. 2015, 35, 1296–1316. [Google Scholar] [CrossRef] [PubMed]
- Zhou, D.; Tang, Y.; Jiang, W. A modified model of failure mode and effects analysis based on generalized evidence theory. Math. Probl. Eng. 2016, 2016, 4512383. [Google Scholar] [CrossRef]
- Yager, R.R.; Filev, D.P. Including probabilistic uncertainty in fuzzy logic controller modeling using Dempster–Shafer theory. IEEE Trans. Syst. Man Cybern. 1995, 25, 1221–1230. [Google Scholar] [CrossRef]
- Tang, Y.; Zhou, D.; Jiang, W. A New Fuzzy-Evidential Controller for Stabilization of the Planar Inverted Pendulum System. PLoS ONE 2016, 11, e0160416. [Google Scholar] [CrossRef] [PubMed]
- Zhou, K.; Martin, A.; Pan, Q.; Liu, Z.G. Median evidential c-means algorithm and its application to community detection. Knowl.-Based Syst. 2015, 74, 69–88. [Google Scholar] [CrossRef] [Green Version]
- Ma, J.; Liu, W.; Miller, P.; Zhou, H. An Evidential Fusion Approach for Gender Profiling. Inf. Sci. 2015, 333, 10–20. [Google Scholar] [CrossRef] [Green Version]
- Xu, P.; Su, X.; Mahadevan, S.; Li, C.; Deng, Y. A non–parametric method to determine basic probability assignment for classification problems. Appl. Intell. 2014, 41, 681–693. [Google Scholar] [CrossRef]
- Smets, P. Data fusion in the transferable belief model. Inf. Fusion 2000, 1, 21–33. [Google Scholar]
- Lefevre, E.; Colot, O.; Vannoorenberghe, P. Belief functions combination and conflict management. Inf. Fusion 2002, 3, 149–162. [Google Scholar] [CrossRef]
- Tang, Y.; Zhou, D.; He, Z.; Xu, S. An improved belief entropy–based uncertainty management approach for sensor data fusion. Int. J. Distrib. Sens. Netw. 2017, 13. [Google Scholar] [CrossRef]
- Yager, R.R. On the Dempster–Shafer framework and new combination rules. Inf. Sci. 1987, 41, 93–137. [Google Scholar] [CrossRef]
- Murphy, C.K. Combining belief functions when evidence conflicts. Decis. Support Syst. 2000, 29, 1–9. [Google Scholar] [CrossRef]
- Deng, Y.; Shi, W.; Zhu, Z.; Liu, Q. Combining belief functions based on distance of evidence. Decis. Support Syst. 2004, 38, 489–493. [Google Scholar]
- Chin, K.S.; Fu, C. Weighted cautious conjunctive rule for belief functions combination. Inf. Sci. 2015, 325, 70–86. [Google Scholar] [CrossRef]
- Jiang, W.; Zhuang, M.; Qin, X.; Tang, Y. Conflicting evidence combination based on uncertainty measure and distance of evidence. SpringerPlus 2016, 5, 1217. [Google Scholar] [CrossRef] [PubMed]
- Jousselme, A.L.; Grenier, D.; Bosse, E. A new distance between two bodies of evidence. Inf. Fusion 2001, 2, 91–101. [Google Scholar] [CrossRef]
- Shannon, C. A mathematical theory of communication. Bell Syst. Tech. J. 1948, 27, 379–423. [Google Scholar] [CrossRef]
- Deng, Y. Deng entropy. Chaos Solitons Fractals 2016, 91, 549–553. [Google Scholar] [CrossRef]
- Yager, R.R.; Filev, D.P. Induced ordered weighted averaging operators. IEEE Trans. Syst. Man Cybern. Part B Cybern. 1999, 29, 141–150. [Google Scholar] [CrossRef] [PubMed]
- O’Hagan, M. Aggregating template or rule antecedents in real-time expert systems with fuzzy set logic. Sign. Syst. Comput. 1988, 29, 681–689. [Google Scholar]
- Zeng, S.; Merigo, J.M.; Su, W. The uncertain probabilistic owa distance operator and its application in group decision making. Appl. Math. Modell. 2013, 37, 6266–6275. [Google Scholar] [CrossRef]
- Cho, S.B. Fuzzy aggregation of modular neural networks with ordered weighted averaging operators. Int. J. Approx. Reason. 1995, 13, 359–375. [Google Scholar]
- Peng, Y.; Zhang, Y.; Tang, Y.; Li, S. An incident information management framework based on data integration, data mining, and multi-criteria decision making. Decis. Support Syst. 2011, 51, 316–327. [Google Scholar] [CrossRef]
- Fan, X.; Zuo, M.J. Fault diagnosis of machines based on D-S evidence theory. Part 1: D–S evidence theory and its improvement. Pattern Recognit. Lett. 2006, 27, 366–376. [Google Scholar] [CrossRef]
- Henry, D.; Cieslak, J.; Zolghadri, A.; Efimov, D. H ∞/H - LPV solutions for fault detection of aircraft actuator faults: Bridging the gap between theory and practice. Int. J. Robust Nonlinear Control 2015, 25, 649–672. [Google Scholar] [CrossRef]
- Cieslak, J.; Efimov, D.; Zolghadri, A.; Henry, D.; Goupil, P. Design of a non-homogeneous differentiator for actuator oscillatory failure case reconstruction in noisy environment. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2015, 229, 266–275. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
| 0.41 | 0.29 | 0.30 | 0.00 | |
| 0.00 | 0.90 | 0.10 | 0.00 | |
| 0.58 | 0.07 | 0.00 | 0.35 | |
| 0.55 | 0.10 | 0.00 | 0.35 | |
| 0.6 | 0.10 | 0.00 | 0.30 |
| BPAs | Methods | Faults | ||||
|---|---|---|---|---|---|---|
| Dempster’s method [25] | 0 | 0.8969 | 0.1031 | 0 | B | |
| Murphy’s method [54] | 0.0964 | 0.8119 | 0.0917 | 0 | B | |
| Deng et al.’s method [55] | 0.0964 | 0.8119 | 0.0917 | 0 | B | |
| The proposed method | 0.0964 | 0.8119 | 0.0917 | 0 | B | |
| Dempster’s method [25] | 0 | 0.6350 | 0.3650 | 0 | B | |
| Murphy’s method [54] | 0.4939 | 0.4180 | 0.0792 | 0.0090 | A | |
| Deng et al.’s method [55] | 0.4974 | 0.4054 | 0.0888 | 0.0084 | A | |
| The proposed method | 0.6960 | 0.1744 | 0.1253 | 0.0056 | A | |
| Dempster’s method [25] | 0 | 0.3321 | 0.6679 | 0 | C | |
| Murphy’s method [54] | 0.8362 | 0.1147 | 0.0410 | 0.0081 | A | |
| Deng et al.’s method [55] | 0.9089 | 0.0444 | 0.0379 | 0.0089 | A | |
| The proposed method | 0.9683 | 0.0020 | 0.0133 | 0.0163 | A | |
| Dempster’s method [25] | 0 | 0.1422 | 0.8578 | 0 | C | |
| Murphy’s method [54] | 0.9620 | 0.0210 | 0.0138 | 0.0032 | A | |
| Deng et al.’s method [55] | 0.9820 | 0.0039 | 0.0107 | 0.0034 | A | |
| The proposed method | 0.9914 | 0.0001 | 0.0025 | 0.0061 | A |
| Sensor Report | ||||
|---|---|---|---|---|
| 0.60 | 0.10 | 0.10 | 0.20 | |
| 0.05 | 0.80 | 0.05 | 0.10 | |
| 0.70 | 0.10 | 0.10 | 0.10 |
| Evidence Distance-Based Parameter | ||||
|---|---|---|---|---|
| Calculation Result | 0.1916 | 0.3477 | 0.2033 | 0.3712 |
| Belief Entropy-Based Parameter | ||||
|---|---|---|---|---|
| Calculation Result | 2.2909 | 1.3819 | 1.7960 | 0.5884 |
| Fault Types | ||||
|---|---|---|---|---|
| Only Dempster’s Rule of Combination | 0.4519 | 0.5048 | 0.0336 | 0.0096 |
| Fan et al’s Method [66] | 0.8119 | 0.1096 | 0.0526 | 0.0259 |
| The Proposed Method | 0.9123 | 0.0810 | 0.0027 | 0.0039 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, Y.; Zhou, D.; Zhuang, M.; Fang, X.; Xie, C. An Improved Evidential-IOWA Sensor Data Fusion Approach in Fault Diagnosis. Sensors 2017, 17, 2143. https://doi.org/10.3390/s17092143
Tang Y, Zhou D, Zhuang M, Fang X, Xie C. An Improved Evidential-IOWA Sensor Data Fusion Approach in Fault Diagnosis. Sensors. 2017; 17(9):2143. https://doi.org/10.3390/s17092143
Chicago/Turabian StyleTang, Yongchuan, Deyun Zhou, Miaoyan Zhuang, Xueyi Fang, and Chunhe Xie. 2017. "An Improved Evidential-IOWA Sensor Data Fusion Approach in Fault Diagnosis" Sensors 17, no. 9: 2143. https://doi.org/10.3390/s17092143
APA StyleTang, Y., Zhou, D., Zhuang, M., Fang, X., & Xie, C. (2017). An Improved Evidential-IOWA Sensor Data Fusion Approach in Fault Diagnosis. Sensors, 17(9), 2143. https://doi.org/10.3390/s17092143